
三轴重载货车AFS与DYC集成控制研究
2023-09-21 03:53:24李韶华王桂洋
机械设计与制造 2023年9期
苏 傲,李韶华,王桂洋
(1.石家庄铁道大学省部共建交通工程结构力学行为与系统安全国家重点实验室,河北 石家庄 050043;2.石家庄铁道大学机械工程学院,河北 石家庄 050043)
1 引言
重载汽车因其惯性大、侧倾中心高、轴距长、轮距较窄等特点,在紧急避障或复杂地形上更易出现侧翻、过度转向、不足转向等横向稳定性问题。针对横向稳定性问题主要也是对横摆力矩的控制。横摆力矩的控制方法包括前轮主动转向(Active Front Steering,AFS)和直接横摆力矩控制(Direct Yaw Moment Control,DYC)。由于DYC系统的介入会让车速明显改变,影响驾驶员的操纵体验和舒适性,而AFS 系统可以在不影响驱动性能的前提下保证车辆的横向稳定性,但如果轮胎处于非线性工作区域则失去转向性能。从安全性、操纵性和舒适性的角度出发,单一的控制系统很难保证车辆的稳定性。所以根据车辆纵向力和横向力的耦合关系,对AFS与DYC集成控制的探索具有重要研究意义。
文献[1]基于线性二次型最优控制和迭代学习PD死区控制设计了集成控制器。文献[2]提出了一种基于MPC的大型客车集成控制器,保证了车辆的行驶稳定性。文献[3]基于离散滑模变结构控制算法,提出了一种用于控制多轴商用车的集成控制器,研究表明其反应迅速,鲁棒性强,有效的保证了车辆的稳定性。文献[4]基于单神经元自适应PID算法设计了AFS与DYC协调控制器。为了实现协调控制基于车辆行驶稳定性指标设计了调度参数。文献[5]提出了主动后转向协调和直接横摆力矩控制的模型预测控制方法,能够有效地保持和提高车辆在期望路径上的稳定性,并具有消除干扰的能力。文献[6]设计了一种AFS和DYC集成控制器,使用分层结构,上层控制器采用一种非光滑控制方法,下层控制器采用最优控制算法实现轮胎利用率的最小和。为了减少抖振问题,实现有限时间收敛,文献[7]提出了一种自适应NTSM算法。将NTSM 方法与自适应技术相结合,提出了滑模控制方法,保证了系统的抗干扰性和有限时间收敛性,同时采用自适应技术搜索时变控制增益的最小值,从而获得系统的最小抖振。
目前关于车辆横摆问题大多数研究建立在单独的主动转向和差动制动系统的协调或解耦控制,但是角位移与轮胎力的完全解耦非常困难。集成控制解决了解耦的问题但是他们的控制目标单一,主要偏向于横摆角速度或质心侧偏角某一个量。这里提出基于自适应模型预测控制理论的多目标控制,AFS与DYC集成控制算法的控制目标为实时优化的横摆角速度和质心侧偏角。
2 车辆动力学模型
对于车辆DYC与AFS集成控制策略的研究,首先建立相对应的车辆动力学模型,这是汽车底盘动力学研究的基础。车辆动力学模型的发展历程从简单线性模型到现在高精度高维度的非线性模型。从系统开发的角度看,车辆模型分为控制器设计模型和仿真实验验证模型。
车辆系统控制器开发主要依据简单的线性模型,从而较少计算量,降低控制器开发难度;控制器效果仿真实验需要使用复杂、精度高的非线性模型,提高仿实验的可靠性。这里的控制器模型采用线性的二自由度车辆模型,仿真模型采用商用软件Truck-Sim 进行建模仿真。
这里主要是将二自由度车辆模型作为控制系统的参考模型。三轴汽车在车身坐标系下的二自由度模型,如图1所示。
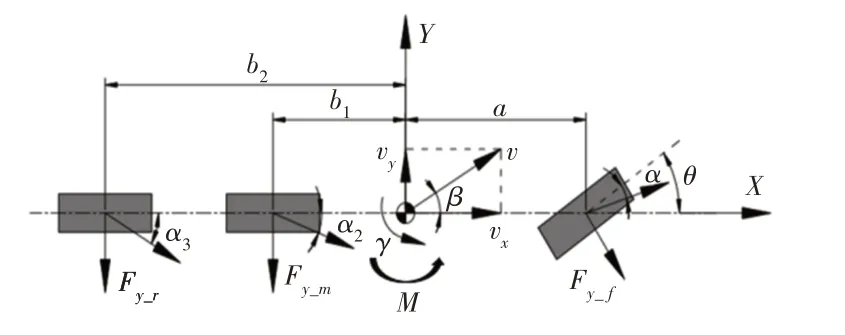
图1 二自由度车辆模型Fig.1 Two Degree of Freedom Vehicle Model
车辆系统运动方程为:
由几何关系和运动学关系得:
建立的二自由度车辆模型假设车辆轮胎工作处于线性工作区,线性工作区轮胎的侧向力与侧偏角近似于线性关系,则轮胎的侧向力可表示为:
式中:kf,km,kr—前、中和后轮的等效轮胎侧偏刚度。
将式(4)带入式(1)中得:
以车辆质心侧偏角β和横摆角速度γ为系统状态量,建立以下标准状态空间方程的形式:
车辆行驶过程中,稳态时的横摆角速度ωr为定值,此时整车处于稳态工况下,即γ̇= 0,β̇= 0。整理后求解可得稳态期望横摆角速度和期望质心侧偏角的表达式:
但是考虑车辆在道路行驶的实际情况,当车辆处于极限工况时,所计算的期望参考值将被边界值代替。根据经验公式可得,期望横摆角速度的临界值为,期望质心侧偏角临界值为 |βd|= tan-1(0.02μg)。
3 轮胎力分配策略
3.1 各个车轮垂向载荷的计算
车辆在道路行驶进行转弯或者加速、减速的过程中,车辆的纵向加速度、侧向加速度等对车轮垂向的载荷有一定影响。考虑车辆的载荷转移,各个车轮的垂向载荷如下所示,其中,Fzij分别代表fl左前轮,fr右前轮,ml左中轮,mr右中轮,rl左后轮,rr右后轮。
式中:ax—车辆纵向加速度;ay—车辆侧向加速度;hc—车辆的质心高度;Bf—前轮轮距;Bm—中轮轮距;Br—后轮轮距。其中:d=(b1+b2)/2;L=a+d。
3.2 各个车轮的制动力分配
通过自适应MPC算法得到附加横摆力矩后,需要对车辆各个车轮施加不同的制动力。采用单侧制动直接分配法,即对同侧前、中、后轮胎同时进行制动,该方法具有算法简单、易于实现、对轮胎滑移率利用率高且实时性强等优点[2]。
如果车辆所需附加横摆力矩为Mz,采用单侧制动,以左侧制动为例可以得到以下方程:
式中:Fbfl、Fbml和Fbrl—前、中、后轮上施加的制动力;Bf、Bm和Br—前、中、后轮的轮距。
由于前轮转角θ较小,且前中后轮距也相近,故可得单侧制动力为:
在车轮滑移率不变时,轮胎与地面最大附着力与轮胎垂直载荷之比为定值[9],因此采用垂直载荷的比例来进行制动力动态分配方法,来充分利用地面附着条件。对各个车轮进行受力分析得到左侧各车轮施加的制动力如下所示(右侧各轮计算同理):
4 基于自适应MPC模型预测控制集成控制器的设计
4.1 集成控制系统的设计
基于自适应MPC模型预测控制的集成控制方法采用分层的控制结构,如图2所示。包括信号调理层、集成控制层、控制分配层和执行层。重点研究集成控制层和控制分配层,集成控制器根据横摆角速度和质心侧偏角的期望值与实际值的差值,以及车辆的实时状态,计算出保证车辆稳定行驶的附加前轮转角以及直接横摆力矩M;控制分配层则是将附加前轮转角反馈给方向盘系统以及将附加横摆力矩通过轮胎力分配策略将制动力分配到各个车轮。最后车辆状态信息反馈给MPC进行滚动优化求解,反馈给LPV模型进行状态更新,将车轮转角反馈给参考模型计算车辆状态参考值。
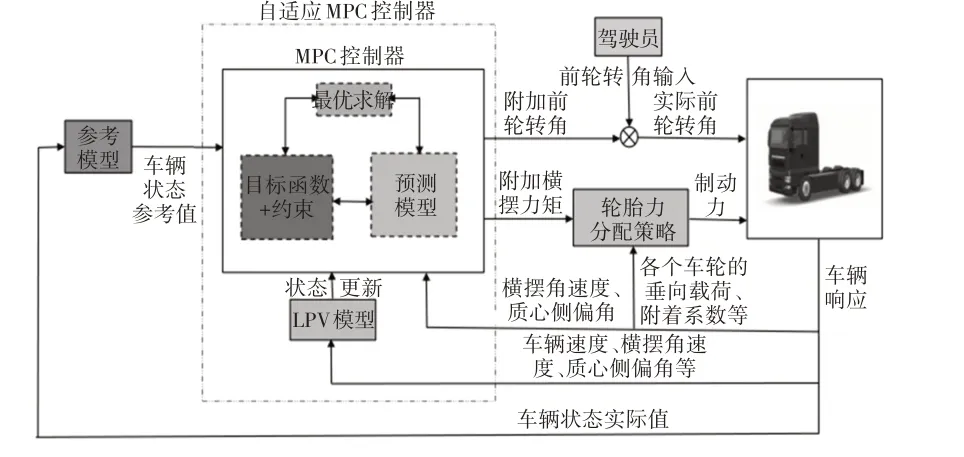
图2 AFS与DYC集成控制流程图Fig.2 Integrated Control Flow Chart of AFS and DYC
4.2 MPC控制器预测模型
在现代控制理论中大多采用状态空间模型来进行MPC模型预测控制器的设计,基于状态空间法MPC模型预测控制的主要内容分为以下三个方面[9]:预测模型,滚动优化和反馈矫正。
基于MPC模型预测算法的集成控制器进行设计,首先需要确定预测模型。汽车在实际行驶中是一个非线性系统,集成控制系统的目的是将车辆实际状态维持在线性工作区域,因此采用线性预测模型能够满足控制系统的要求,而且能够有效减少计算量,降低控制器设计难度。这里所用模型在二自由度模型基础上,考虑到附加横摆力矩和附加前轮转角的影响,其示意图,如图2所示。
预测模型动力学方程:
式中:M—所需附加横摆力矩。
将理想二自由度车辆模型的参数带入,得到预测模型表达式为:
以质心侧偏角和横摆角速度作为模型的输出变量,得到系统预测模型为:
其中:状态变量x(t) =(γ,β)T;系统输入变量为u(t) =(θ,M)T;系统输出量为y=(β,γ)T。
由式(15)可以看出,系统预测模型的参数矩阵与纵向车速vx相关,由于vx时变,所以该预测模型具有时变特性,是一个线性变参数时变模型即LPV模型。此前大多数基于二自由度线性模型在进行系统控制器的设计时,都忽略了模型参数的变化,将车辆的纵向车速vx视为常数,其控制器模型称为线性定常数时变模型即LTI模型。但是在车辆运行中,车辆速度不是恒定的,因此,在理论分析上LPV模型要比LTI模型精度要高。
4.3 MPC模型预测控制器的设计
模型预测控制是离散的,对式(13)进行离散化处理,采样时间Ts=0.001,离散后的模型为:
需要进一步将离散化模型式(16)转化为线性时不变增量模型,以满足增量式MPC算法的控制系统。进而得到新系统的状态空间模型:
模型预测控制通过观测当前的系统状态,来预测系统未来动态。这里取系统的预测时域为p,控制时域为m,并且做出以下假设:
(1)预测时域为p,控制时域为m,且m≤p
(2)控制量在控制时域之外保持不变,即:
若在k时刻预测的k+i时刻系统输出为y(k+i|k)则可以定义预测输出向量和控制输入向量分别为:
根据以上公式可得预测方程如下:
式中:Sx,Iy,Su—状态变量、输出变量和控制变量的系数矩阵。
由于存在干扰噪声等因素,预测输出量y(k)和实际输出量ya(k)之间存在偏差,所以预测时域内的输出量偏差表示为:
在预测时域内假设输出量偏差保持不变即:
误差序列为:
系统校正后的预测输出为:Y(k+ 1|k) +E(k+ 1)。
4.4 约束优化及反馈控制
系统的控制目标是使车辆的实际横摆角速度跟踪上参考模型的横摆角速度,即使Δγ= 0,这里的被控预测输出为Y(k+ 1|k),定义参考输出为:R(k +1) =[r(k+ 1)r(k+ 2)…r(k+p)]T1×p,
由于车辆的结构限制以及安全性考虑,我们需要对控制量,控制增量,输出量进行一定的约束限制。
(1)控制量u的约束
(2)控制量增量Δu的约束
(3)输出量y的约束
为了实现车辆的横向稳定性控制,需要设计基于横向稳定性的代价函数。控制器要求车辆在实际行驶中,车辆的质心侧偏角β和横摆角速度γ能够跟随期望质心侧偏角βd和γd的变化。同时为了减小驾驶员操作负担还需要代价函数尽可能的减小前轮转向角变化量Δθ。但是代价函数能够同时满足这两个相互矛盾的要求是不可能的,因此我们在代价函数上添加了权重因子。MPC模型预测控制的优化目标就是要寻找一个最优控制量使输出量尽可能的接近输出参考量,同时要求控制量不要过大。
在线优化算法中,常用的优化指标就是二次性能指标即:
式中:Q,R—输出权重因子和控制权重因子;ρ—权重系数;ε—松弛因子。
将二次性能指标函数转化为对如下二次规划问题求解:
5 仿真验证
为验证自适应MPC集成控制策略的有效性,利用Simulink—Trucksim联合仿真,通过与MPC控制算法作比较,验证此算法的有效性。
为了模拟极限工况下汽车的操纵性以及自适应算法的有效性,选用急剧双移线和方向盘正弦输入的车辆变速运动。仿真车辆的参数源于东风商用车DFL1250A12,利用TruckSim对车辆动力学模型进行分块搭建,具体的车辆参数,如表1所示。
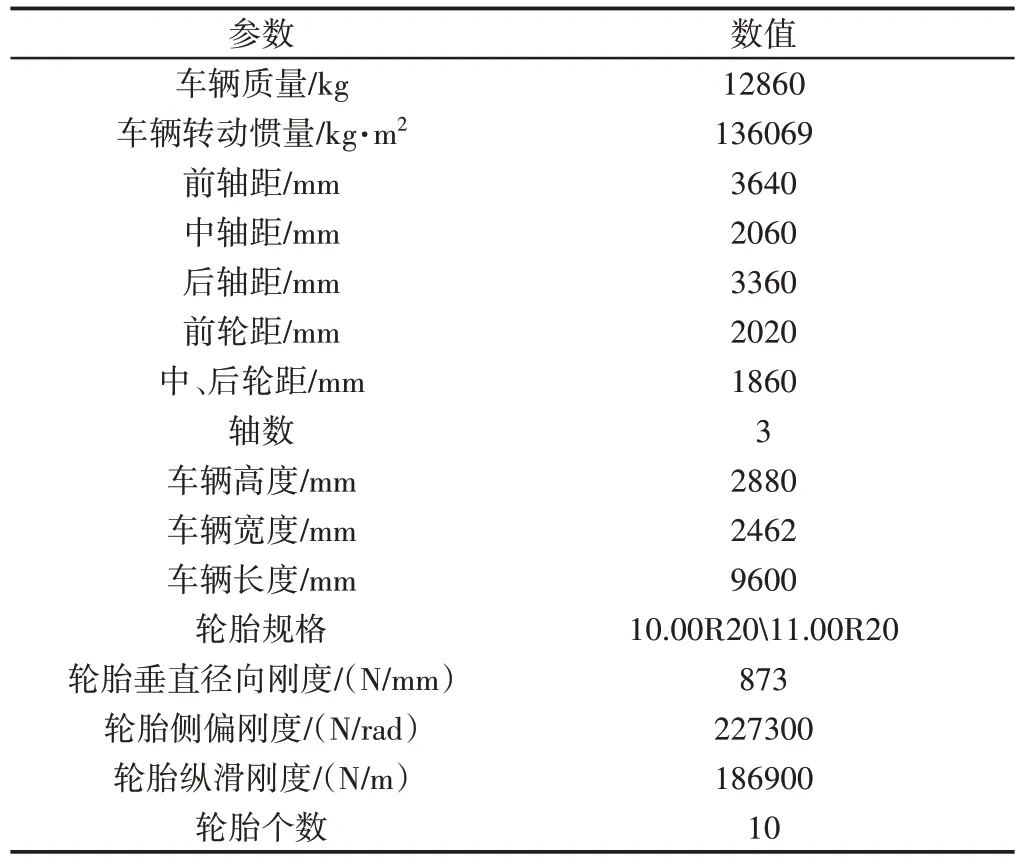
表1 车辆参数Tab.1 Vehicle Parameters
5.1 匀速工况下车辆参数响应
为验证所设计的集成控制策略在对车辆稳定性的控制作用,选择在低附着路面上进行双移线工况下进行仿真。在Trucksim中设置路面附着系数为0.4 的双移线工况下,分别进行车速为30km/h、50km/h、70km/h和90km/h的仿真实验,车辆参数响应的仿真结果,如图3~图6所示。


图3 车辆行驶轨迹Fig.3 Vehicle Trajectory
由图3可知在集成控制的作用下,车辆偏移量比无控制下降(1~3)%。在路径偏移误差允许范围内。如图4~图6车辆在路面附着系数为0.4的路面上,自适应MPC控制与MPC控制车辆状态参数分别提升:图4车辆横摆角速度提升(6~55)%,(3~41)%;图5车辆质心侧偏角提升(4~79)%,(3~69)%;图6侧向加速度提升(9~15)%,(2~9)%;从上图可以看出车辆在90km/h的速度下,无控制和MPC控制的车辆已经失稳,而自适应MPC控制能够保证车辆平稳运行;另外在路面附着系数为0.85的路面上,由仿真数据可知车辆的状态参数在30km/h和50km/h提升在5%左右,在70km/h和90km/h提升在10%左右。从以上仿真结果可知,自适应MPC控制和MPC控制均在低附着路面的控制效果要优于高附着路面;在中高速的控制效果要优于低速;自适应MPC控制效果要优于MPC控制。
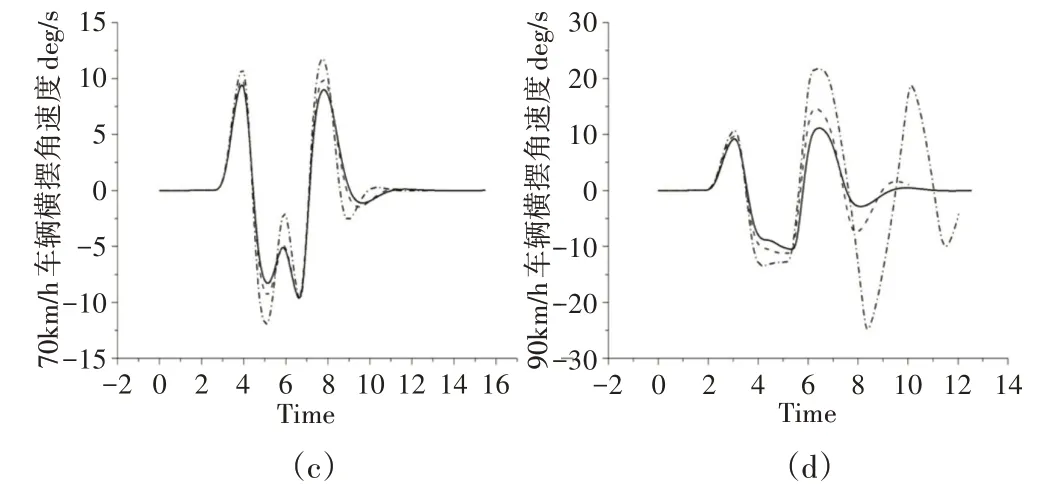
图4 车辆横摆角速度Fig.4 Vehicle Yaw-Rat

图5 车辆质心侧偏角Fig.5 Vehicle Side-Slip Angle

图6 车辆侧向加速度Fig.6 Lateral Acceleration of Vehicle
5.2 匀速工况下车辆参数响应
为了验证自适应MPC能够适应车辆速度的变化,实时控制车辆的稳定。选择低附着路面上车辆进行正弦方向盘转角输入作为仿真工况。在Trucksim中设置附着系数为0.4的路面,速度从90km/h到20km/h,方向盘转角以频率为0.2Hz,幅值为90的正弦进行输入,车辆状态响应,如图7所示。

图7 车辆各个状态量Fig.7 Vehicle State Quantity
由上分析可知车辆在变速的情况下,基于自适应MPC的控制效果要远远优于MPC控制。MPC在变速情况下对车辆的控制效果不理想,而自适应MPC控制能够跟随速度的变化进行实时更新车辆的控制状态方程,从而实时在线输出对应车速的控制量使车辆稳定行驶。
6 结论
提出了一种基于自适应MPC模型预测控制的三轴重载汽车的AFS与DYC集成控制策略,并通过Simulink-Trucksim联合仿真在双移线以及方向盘正弦输入工况下进行仿真验证,研究表明。(1)在匀速工况下,相对于MPC模型预测控制和没有集成控制的车辆,基于自适应MPC模型预测控制所设计的AFS与DYC集成控制能够有效的遵循驾驶员的轨迹意愿,同时又能够实时控制车辆的横摆角速度、质心侧偏角和侧向加速度等车辆参数,从而提高车辆的操纵稳定性,保证三轴重载货车的行驶安全性。(2)在变速工况下,MPC模型预测控制不能够实时更新车辆状态,从而不能根据车辆速度的变化实时控制车辆。自适应MPC模型预测控制能够在线实时更新车辆状态,将更新的状态传递给MPC模型预测控制进行实时滚动优化,对车辆进行实时控制,具有很好的鲁棒性。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30 06:24:26
北京航空航天大学学报(2021年4期)2021-11-24 01:13:12
民用飞机设计与研究(2020年4期)2021-01-21 09:15:46
新课程·中学(2019年7期)2019-09-17 13:41:15
物理教学探讨(2018年1期)2018-02-13 09:26:52
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
航天器工程(2014年5期)2014-03-11 16:35:53
铁道建筑(2010年11期)2010-07-30 02:04:04
