
基于TDOA的UWB定位系统精度验证
2023-09-20 13:01陈妍妍
无线互联科技 2023年14期
陈妍妍
(郑州联睿电子科技有限公司,河南 郑州 450000)
0 引言
随着无线通信技术的发展,社会进入移动物联时代,基于无线网络的位置服务(Location-Based Service,LBS)已经在人类生活的各方面扮演着不可或缺的重要角色[1]。自2021年苹果公司发布基于UWB技术的AirTag,UWB室内定位技术越来越被大众熟悉。UWB定位技术成为无线定位技术的热点。
1 基于TDOA的双曲线定位算法
双曲线定位也称为到达时间差(TDOA)定位,根据K个参考节点到第Ai个参考节点的到达时间差来决定Ai的位置[2]。本研究假定K个参考点分享一个共同的参考时钟,与参考时钟相比节点Ai处的时间被延时了δ。这里关键是来自不同参考节点的时间通过相减后去掉了时延δ。观察参考节点中的一对(An,A(n-1)),有:
Rni-R(n-1)i=c(τni+δ)-c(τ(n-1)i+δ)=c(τni-τ(n-1)i)
(1)
一个TDOA值可以定义为一条以接收机为焦点的竖曲线,目标辐射源就位于双曲线上[3]。由于一组双曲线无法确定标签的位置,因此至少需要3个基站才能够对标签进行定位,双曲线的交点即为标签的位置。TDOA算法的位置计算公式如下:
(2)
(3)
R21=c(τ2-τ1)
(4)
R31=c(τ3-τ1)
(5)
式(4)、式(5)中:c为光速,τi为第i个基站收到定位信息的时间。各基站的位置信息是已知的,利用上述公式即可得到标签的位置信息,双曲线定位需要在参考节点间有一个精确的共同参考时钟,但并不要求基站和标签间准确同步。因为电磁波的传感速率很高,微小的同步误差会在算法中放大,从而降低定位系统的精度。
2 基于TDOA双曲线定位的误差分析
基于UWB的定位系统通常用于GNSS信号接收不到或接收较差的室内复杂环境,不同定位场景的误差源不尽相同。常见的误差源主要有信号的同步误差、多径干扰误差、NLOS(非视距)误差等。不同的定位算法也对定位精度有一定的影响。
2.1 信号同步误差
同步误差在TDOA定位的过程中,是一个非常重要的参数。在定位中,信号时间延迟的精度与各基站间的同步程度密切相关。室内环境下,特别是多径的传播环境下,接收到的信号峰值越接近实际的峰值点,定位精度将会越高。所以在定位计算中,如何获得优质的峰值点非常重要。
2.2 多径误差
定位场景中的许多物体,如地面,玻璃、桌子等都会对信号进行反射和衍射,这种信号从发射端经过物体反射和衍射到达接收机的现象就是多径传播。信号经过多径传播后,可能跟原来的信号在相位、幅度和延迟上都发生了变化。但接收机端并不能区分收到的信号是发射端直接发射过来的,还是经过物体反射衍射后收到的。而定位解算的误差程度是由这些信号经过多径的偏差程度来决定的。
2.3 NLOS误差
常见的定位场景中,信号的发射端和接收端经常存在各种遮挡,导致信号从发射端到接收端没有直达路径。这种信号经过衍射后同样也可以到达接收机,但接收机接收到的衍射信号经历了更多的延迟。这种衍射信号给定位带来的误差就是NLOS误差。
2.4 环境及其他误差
环境中影响电磁波的因素很多,水对电磁波的吸收就会造成湿度较大的天气下定位系统测试精度低于湿度低的天气下的测试精度。除了自然环境因素外,同频段的电子设备也会对UWB定位有干扰,高压电所产生的磁场也对定位系统精度有影响。
2.5 定位算法精度的影响
在TDOA定位算法中,初始值的选定为基站三角形的几何中心点。在得到TDOA测量值后,用迭代最小二乘法计算位置估计点的修正值,来逐步修正位置估计点。经过若干次迭代,使估计点与实际位置点的偏差逐步缩小。若修正值逐步收敛,并最终小于门限值,即为定位收敛成功;若修正值发散,或迭代超过最大迭代次数仍大于门限值,则视为定位收敛失败。
定位系统的实时性和定位精度是可以根据需要动态调整。门限值和最大迭代次数的调整,可以在牺牲部分实时性的同时,一定程度上增加系统的定位精度。当精度下降一部分的时候,解算系统定位所需要的时间也会相应减少。
3 基于TDOA定位系统的构建
一个典型的TDOA二维定位单元,包含四个定位基站,一个定位标签。主基站发送信号确保参与定位基站的时钟同步。定位标签发送信号,定位基站接收信号并将数据传至引擎,引擎根据基站的准确位置坐标计算出定位标签的位置。
4 基于TDOA的定位系统测试
测试同步误差和同步标准差的时间单位为15.65 ps,按照电磁波的传播速度c=3×108m/s,不同时间误差条件下的理论距离误差如下:1ns对应的距离误差为30 cm(1ns=10-9s,1ns约等于64个计数单位)。
同步误差主要受上层基站距离的精度影响较大,在基站坐标测量比较准确的情况下,同步误差理论上会很小。
4.1 空旷环境动态测试验证
布设环境:20 m×20 m。
室外空旷环境下同步标准差为20~30个单位。测试验证室外空旷环境下,二维定位区域内动态定位精度。测试环境空旷无遮挡,基站坐标的测量会存在一定的误差。动态测试选取平行于Y轴上的一条直线和区域内半径为1 m的圆周运动2种方式。因考虑数据量的问题,直线运动沿直线往返2次,圆周运动沿圆周行走2周。动态定位精度如图1—2所示。
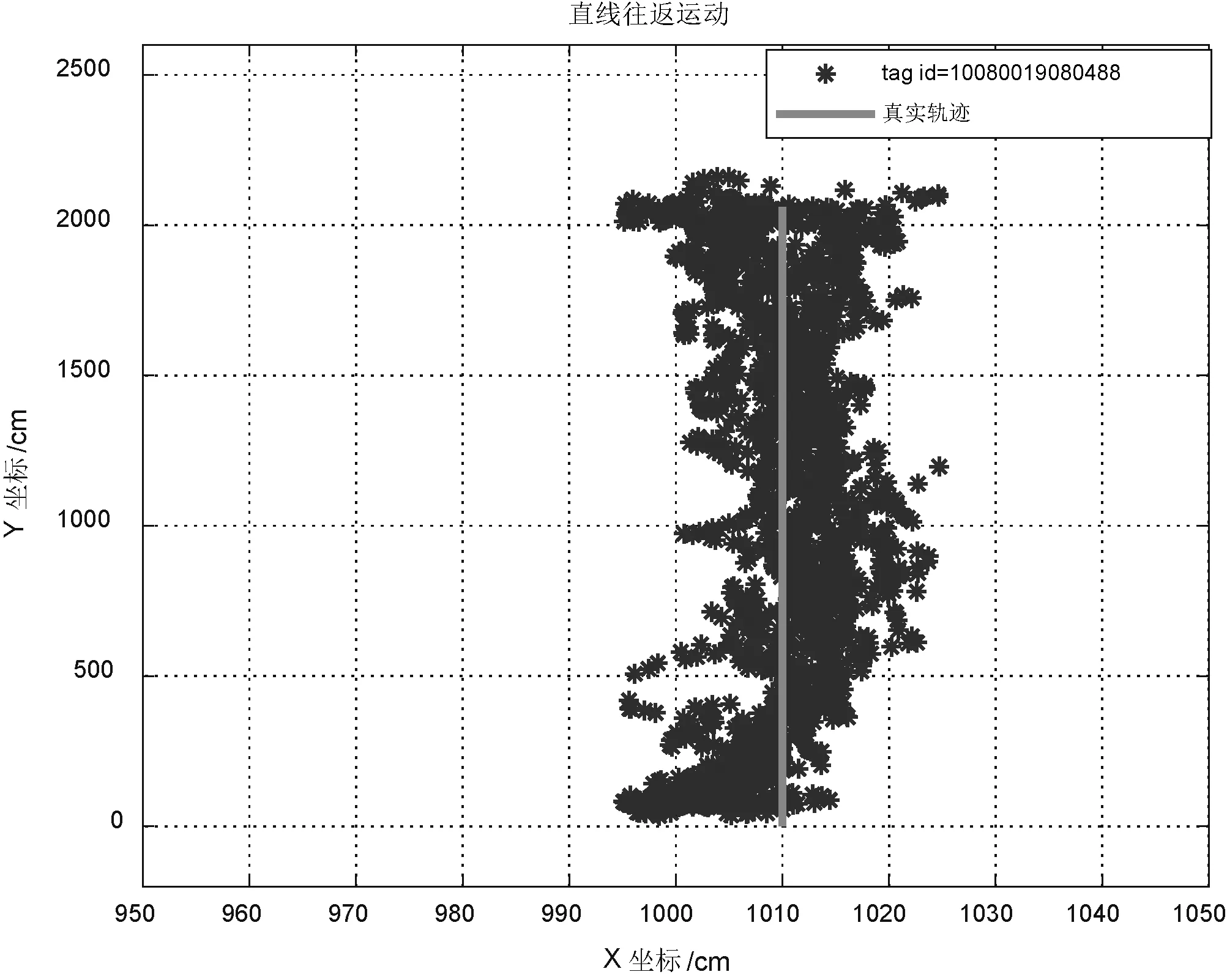
图1 直线往返运动定位
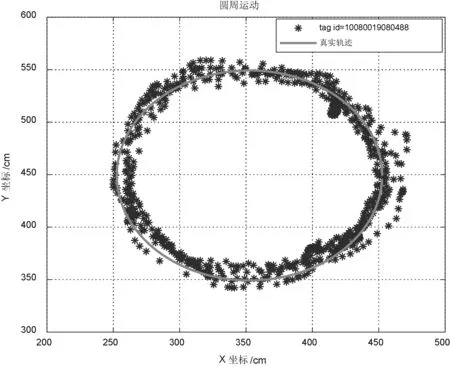
图2 圆周运动定位
室外动态测试结果表明,室外空旷环境下,TDOA二维定位区域内的动态精度可以达到20 cm以内。
4.2 空旷环境二维区域外定位精度测试验证
测试场景同动态定位场景,环境空旷无遮挡,地面为水泥路面。同步标准差为20~30个单位。基站坐标测量存在一定的误差。
布设环境:20 m×20 m。区域内、外测试结果分别如表1—2所示。
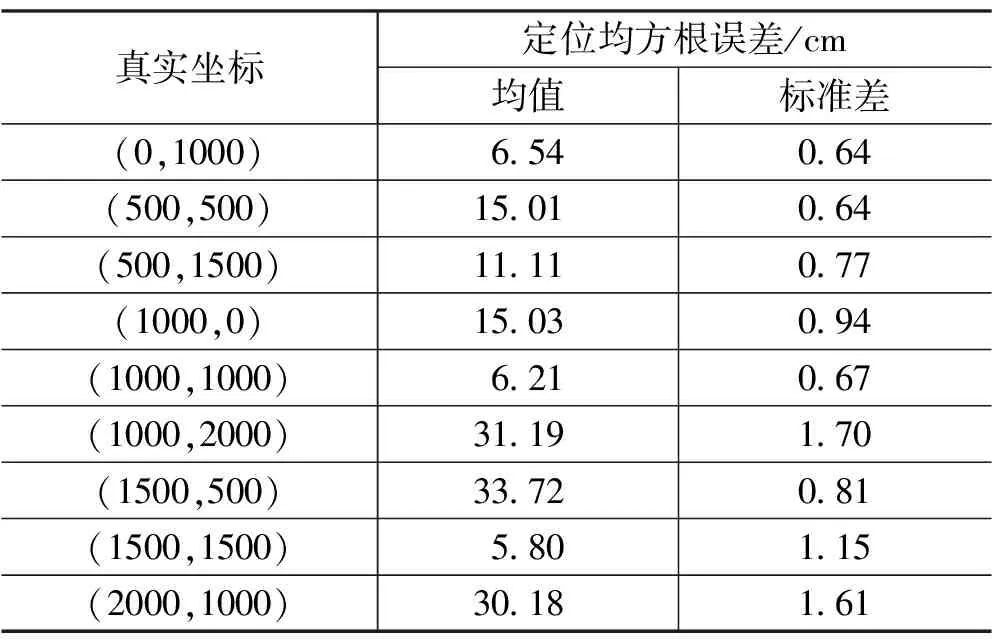
表1 区域内测试结果
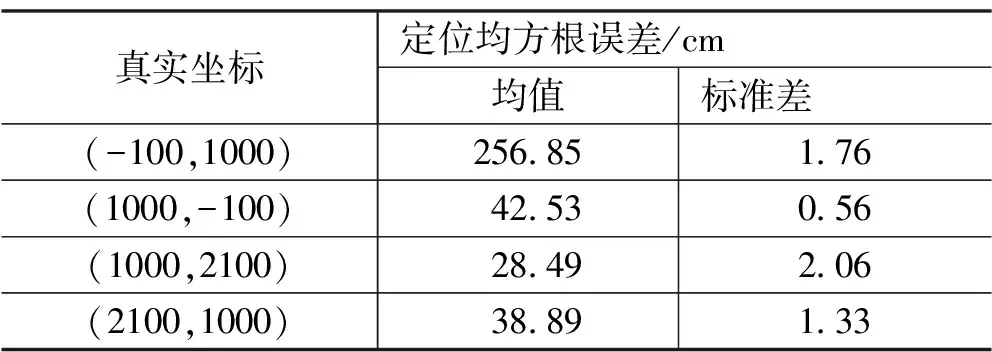
表2 区域外测试结果
从测试结果看,区域内精度基本满足30 cm,区域外精度各边界表现不尽相同,最差精度大于1 m。
5 结语
本文主要对UWB基于TDOA的定位算法和误差进行全面分析,进行了室外空旷环境的定位精度测试验证,对比相同环境下TDOA区域内和区域外的定位精度。测试结果表明,综合考虑测量误差,区域内实际测试精度基本都可以满足20 cm内,定位稳定。区域边界精度略差,测试最大误差30~40 cm。TDOA算法区域外定位的准确度和稳定度都不能保证,无法满足厘米级定位。
猜你喜欢
军事文摘(2023年4期)2023-04-05
散文诗世界(2022年4期)2022-04-08
散文诗世界(2022年4期)2022-04-08
长江丛刊(2020年13期)2020-11-19
青海湖(2020年6期)2020-09-07
测控技术(2018年4期)2018-11-25
探索科学(2017年4期)2017-05-04
中国交通信息化(2016年8期)2016-06-06
发明与创新(2015年29期)2015-02-27
测绘科学与工程(2013年2期)2013-03-11
