
基于晶体振荡器的高性能守时方法研究
2023-09-20 13:00:56苏章站方修成邓福龙
无线互联科技 2023年14期
苏章站,方修成,邓福龙
(江苏上频高新科技有限公司,无锡 惠山 214000)
0 引言
现阶段,大部分通信设备和系统的时钟源均采用了晶体振荡器,如GPS卫星定位导航系统和移动通信基站等。这些设备之间的通信需要采用精确且统一的时钟源,因此对其守时性能有较高的要求。但天气温度以及晶体老化等相关因素都会对设备的通信造成误差,对守时性能高的时钟源进行研究能够进一步推动通信领域的发展。
1 高性能晶体振荡器
1.1 晶体振荡器的应用
晶体振荡器作为一种电子元件,能够产生精确稳定的电信号[1],被广泛地应用在计算机、电视、遥控器等各种振荡电路以及各类通信系统中的频率发生器中,为处理数据的设备提供时钟信号或为特定的系统提供基准信号[2]。晶体振荡器具有较为广泛的应用范围,如数字电路中用于产生时钟信号以及保持信号同步;无线电通信中作为调制器、频率合成器以及解调器等使用;计算机及控制系统中用来进行定时和计时等[3]。时钟脉冲采用石英晶体谐振器产生标准的脉冲信号。微处理器、CTVVTR、常见的钟表都采用石英晶体谐振器。
1.2 晶体振荡器的基本工作原理
晶体振荡器的谐振频率与石英斜面的倾角有较大的关系,频率是固定的。晶体振荡器采用了能够将电能与机械能进行互相转化的晶体,其共振状态能够提供精确和稳定的单频振荡。常规条件下,普通的晶振频率能够达到0.005%的绝对精度。充分利用这一特性,晶振能够提供稳定的脉冲信号,因此被广泛应用在时钟电路中。施加在晶片上的电场能够让晶片产生机械形变,利用这种压电效应制成振荡器产生机械共振进而产生稳定频率的电信号,如图1所示。
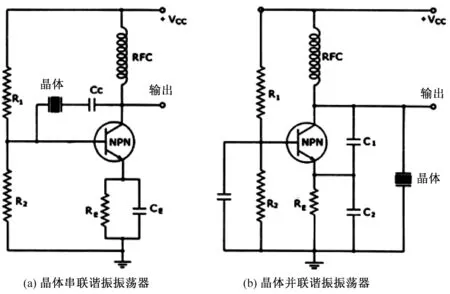
图1 晶体振荡器工作原理
2 晶体振荡器守时失效问题
2.1 静态工作点异常
(1)异常现象:晶体振荡器在静态模式下无输出信号。(2)异常成因:谐振器失常;三极管基极、集电极、发射极静态工作点数据失常;电子元器件故障。
2.2 动态振荡电路失效
(1)异常现象:晶体振荡器在动态模式下无输出或异常输出。(2)异常成因:元器件电路静态工作异常,输入电平异常,电路动态振荡异常,电子元器件故障。
2.3 整形放大电路失效
(1)异常现象:晶体振荡器无法正常工作,无输出信号,输出波形异常,输出波形的高电平偏低。(2)异常成因:开封电路工作异常,三极管工作异常,放大电路输入异常,对地输出异常,电子元器件故障。
3 晶振守时补偿方案
3.1 守时总体方案
守时方案设计:晶体振荡器将脉冲输出到晶振计数模块上进行标准秒脉冲周期内的脉冲数记录。记录的时间达到30 min时对数据的均值和方差进行计算。如果导航卫星失联,则根据前面30 min的均值和方差动态对晶体振荡器计数模块设置脉冲产生计数器的阈值和高精度模拟秒脉冲。
3.2 守时硬件设计
芯片采用CycloneI系列的EP2C8T144C8N,这款芯片具备144个IO端口、36个RAM块、2个PLL锁相环、18个嵌入式乘法器、4种配方式和AS、JTAG下载调试接口。导航卫星信号的接收模块主芯片采用MHKJ-1612,其精准度更高。通过量化误差信息对时间脉冲中的颗粒误差进行补偿,能够确保导航卫星信号的接收模块授时精度达到15 ns。系统晶体振荡器采用恒温晶体振荡器,频率精度能够达到±0.2 ppm,电流为300 mA~2 A。
3.3 守时软件设计
3.3.1 同步秒脉冲信号设计
授时系统的导航卫星在正常连接的状态下能够接收到卫星信号产生的标准秒脉冲以及时间码,发送给时间解码模块。通过锁相环将50MHz的恒温晶体振荡器倍频到200MHz。当检测到标准秒脉冲信号上升或晶体振荡器的计数模块脉冲计数值达到阈值时,时间解码模块就会产生100ms高电平信号,并清零晶体振荡器计数器,产生低电平信号。
3.3.2 平均脉冲数及方差设计
存储的时间到达30 min时可以通过1 s内的晶体振荡器脉冲数值公式来进行平均脉冲数与方差的计算。对数据中的数值进行筛选,剔除大于±s+3 s或小于±s-3 s的异常值,通过公式对剔除后的数据进行平均值和方差的计算。
3.3.3 导航卫星失联后的高精度秒脉冲产生设计
导航卫星失联之后,时间解码模块根据每秒内的警惕振荡器脉冲数的平均值及方差对±s+3 s和±s-3 s的脉冲计数阈值BV1、BV2进行计算。在T周期内晶振脉冲的计数到达BV1时,产生滞后的模拟秒脉冲;当晶振脉冲的计数到达BV2时,产生超前的模拟秒脉冲。
3.4 晶振守时补偿模型
晶体振荡器的驯服原理主要时间源的参考偏差,根据状态的具体参数来控制警惕振荡器的输出。晶体振荡器的驯服目的是对频偏和老化参数进行计算和补偿,以此来确保晶体振荡器的精准和稳定性。
时间偏差规律计算公式为:
T(t)=a0+a1+1/2a2·t2+ζ(t)
(1)
式(1)中:a0代表初始的晶体振荡器参考时间偏差,a1代表频偏,a2代表老化,ζ(t)代表噪声。
晶体振荡器短期内的稳定性最佳表现为10 min内,这阶段的噪声可以忽略不计。晶体振荡器的初始相位计算公式为:
T(t)=a0+a1·t
(2)
T(t)和t的关系无限接近直线。假设t1时刻的时间偏差为T1,t1~t2时间段代表晶体振荡器与参考时间源测量的时间间隔。t1~t2的时间段设为常数△t,则晶体振荡器频率系数计算公式为:
a1=T2-T1/t2-t1
(3)
可以得出晶体振荡器的初始相位系数公式为:
a0=T1·t2-T2·t1/△t
(4)
可以得出晶体振荡器的频偏与初始相位,频率调整后能够让晶体振荡器与参考信号的时间达成同步。
3.5 实验结果分析
实验采用4套授时系统板能够有效避免测试结果出现偶然性情况,采用50MHz标称值的恒温晶体振荡器能够达到精度在±0.2 ppm的效果。将恒温晶体振荡器的50MHz脉冲信号倍频成200MHz,再对标准秒脉冲信号的每个周期中的授时系统恒温晶体振荡器产生的脉冲数值平均值与方差进行统计,具体结果如表1所示。
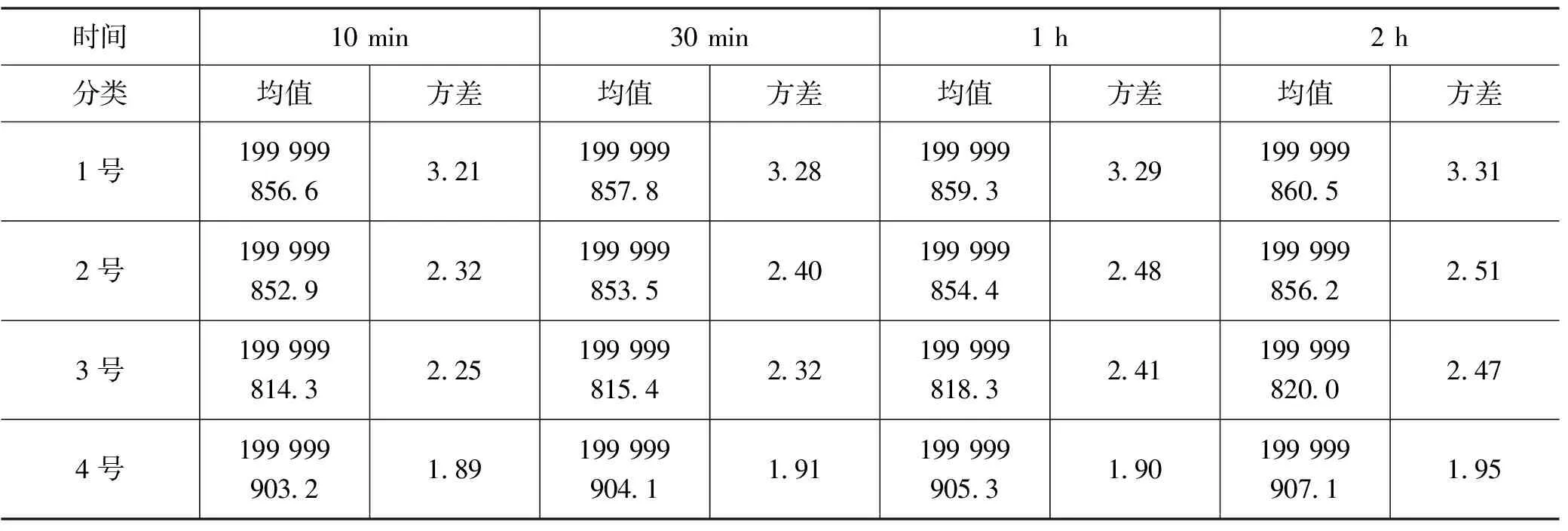
表1 不同时刻秒脉冲单位时间内晶振的脉冲数值的平均值和方差
计算晶体振荡器的实时温度偏差需要考虑到周围的环境温度,对参考温度进行平均计算,对周边温度进行采集和计算,则参考温度的公式为:
(5)
公(5)式中r代表周边环境温度,N代表时长,r代表参考温度。
晶体振荡器进入周围环境变化的偏差计算公式为:
αr=ri-r
(6)
公(6)式中α代表温度的偏差。
温度偏差和控制量关系的公式为:
P=-β×αr
(7)
式(7)中:β代表调节系数,型号不同的晶体振荡器在振值方面有一定的差异性,P代表晶体振荡器的控制量。
晶体振荡器授时系统的基准采用了国家授时中心主钟所输出的1PPS信号,驯服后24h的晶体振荡器进行自我保持状态。采用测量时间间隔的设备对两者的钟差进行测量,计算出晶体振荡器输出的UTC钟差。晶体振荡器进行24h的自由运行,对频偏去除之后的残差峰值为每天556.5 ns。设门限为时间偏差1 μs进行统计能够得出,晶体振荡器驯服时长56 h运行24 h后输出的1PPS与UTC钟差优于380 ns,得出晶体振荡器驯服56h后进入了保持的状态,如表2所示。

表2 晶振进入保持状态运行24 h的ADEV比较
4 结语
本文通过对30 min内标准秒脉冲钟晶体振荡器的每秒脉冲数值的平均值与方差进行统计进行晶体振荡器技术模块阈值的动态设置,产生模拟秒脉冲来达到高精度的守时目的。实验得出,秒脉冲在导航卫星失联的1 h内,对比标准秒脉冲的误差并未超过250 ns,能够满足靶场和电力等系统的守时需求。
猜你喜欢
中学生数理化·七年级数学人教版(2023年6期)2023-05-25 12:17:42
辽宁科技学院学报(2021年3期)2021-07-01 07:33:16
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09 06:09:10
时间频率学报(2021年1期)2021-04-26 12:34:34
新传奇(2019年29期)2019-08-06 03:07:09
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:32
电子测试(2018年14期)2018-09-26 06:04:14
电子测试(2018年1期)2018-04-18 11:52:05
初中生世界·九年级(2017年10期)2017-11-08 21:30:36
小天使·一年级语数英综合(2016年5期)2016-05-14 12:21:05
