
某大口径米波雷达天线折叠同步控制研究
2023-09-20 13:00:56孟国军
无线互联科技 2023年14期
孟国军
(中国电子科技集团公司第三十八研究所,安徽 合肥 230031)
0 引言
大口径米波段雷达用于米波段的地空动态RCS测量,为评估新型航空武器装备雷达隐身性能提供数据支撑,兼顾空中目标运动轨迹测量。其具备对空中目标动态RCS测量功能、对空中目标搜索、捕获和跟踪测量的功能、超分辨测角功能、分离目标的捕获、跟踪测量功能。为了满足作战要求,米波段雷达必须具有大口径、高机动性以及精密测量等特点[1],对雷达天线阵面折叠提出了更高的要求[2]。
本研究以某米波段大口径、高机动雷达天线阵面高精度同步折叠控制策略为研究对象,对天线阵面折叠的同步控制进行了详细设计,在此基础上研制一种新型的大口径长薄雷达天线同步控制方法。
1 工作原理
1.1 结构指标
天线指标要求如下。
天线工作口径:宽×高=6.4 m×14 m;
天线运输口径:长×宽×高=14 m×3 m×2.5 m;
天线阵面面精度:≤10 mm(均方根);
天线阵面面变形:≤30 mm;
天线展开/收拢时间:≤1.5 min;
天线抗风能力:风速8级以下正常工作,风速12级以下不破坏(天线倒伏状态)。
1.2 结构方案
本研究设计的天线阵面主要由中阵面、左阵面和右阵面组成,如图1所示。左/右阵面分别通过7个支耳与中阵面连接,通过4根液压缸(简称缸)实现折叠。每个阵面由天线骨架和天线振子组成,其中天线振子安装在天线骨架上,天线骨架是保证天线阵面刚强度的基础。为保证天线工刚强度和运输尺寸,经分析论证,中阵面骨架尺寸(宽×高×厚)为2.2 m×14 m×0.8 m,左/右阵面骨架尺寸(宽×高×厚)为2.1 m×14 m×0.2 m。
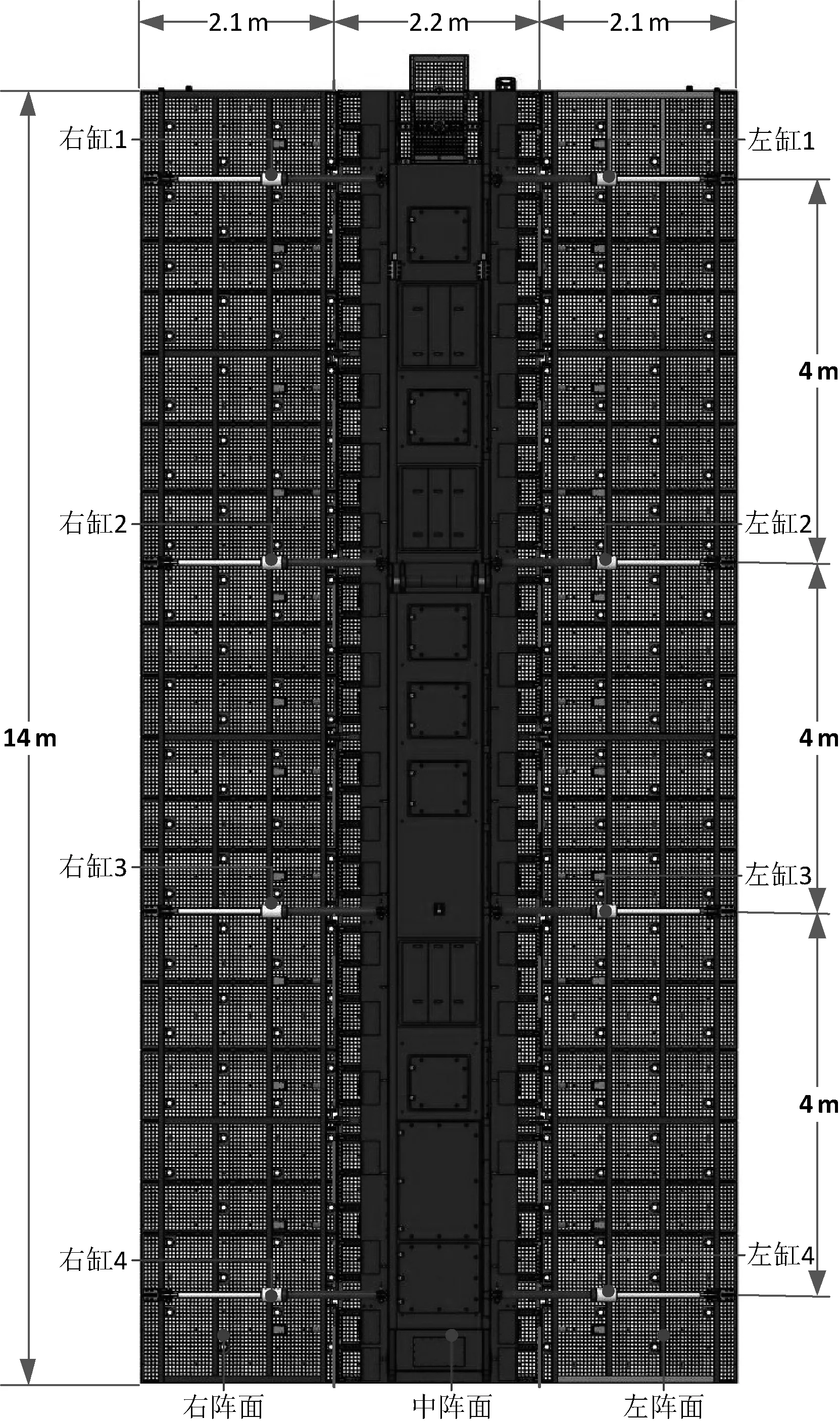
图1 天线展开状态
天线架设时,左/右阵面的4根折叠液压缸驱动天线左/右阵面折叠到指定角度,并通过液压缸上的夹紧器夹住折叠液压缸活塞杆,完成展开锁定,天线收拢动作是架设展开动作的逆过程,具体如图2所示。
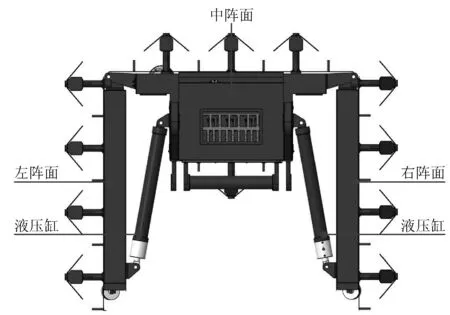
图2 天线折叠状态
2 系统实现
2.1 天线折叠
天线左/右阵面骨架厚度为0.2 m,高度达14 m,高厚比为70,长薄结构,其特点是刚性差。为此,在左/右阵面沿天线高度(14 m)方向等距离分别布置4根液压缸(相邻两根液压缸距离为4 m),每根液压缸上安装有平衡阀、液压锁、夹紧器和拉杆传感器。其中,平衡阀和液压锁安装在液压缸缸体上,夹紧器安装在液压缸缸体前端,拉杆传感器与液压缸平行安装。液压缸缸体端支耳通过销轴连接在中阵面骨架的液压缸支耳上,液压缸活塞杆端支耳通过销轴连接在左/右阵面边缘的液压缸支耳上。在伺服控制系统的控制下,液压泵站为左/右阵面4根液压缸同时供油,实现左/右阵面的折叠。当4根液压缸活塞杆全部伸出到位时左/右阵面折叠到与中阵面成0°(实现天线振子共面),天线变为工作状态。当4根液压缸活塞杆全部收回到位时左/右阵面折叠到与中阵面成90°,天线变为运输状态。
2.2 折叠锁定
左右阵面向上折叠到位锁定是通过机械定位销和液压缸夹紧器来实现的。为保证整个天线阵面在各种工况下的面精度,左/右阵面通过4根液压缸从运输状态向前折叠90°与天线中阵面共面时,左/右阵面与中阵面有机械定位结构限制其继续向上运动,同时每根折叠液压缸上都有一个夹紧器夹住液压缸活塞杆限制左右阵面向下运动,实现对左右阵面的完全锁定,使左、中、右3个阵面形成一个共面刚体,保证天线工作状态时的刚性和面精度。
2.3 同步控制策略
天线左/右阵面折叠分别采用4根液压缸驱动,采用多根液压缸同时驱动必须解决多缸同步控制问题[3],以避免多缸不同步或单缸失效时对天线阵面造成的危害。
经仿真分析,当天线左/右阵面4根折叠液压缸行程差超过20 mm时,将导致左右阵面产生明显的扭曲变形。当天线左/右阵面4根折叠液压缸行程差超过100 mm时,将造成左右阵面不可逆的塑性变形。为此,研究中采用了液压缸+液压比例阀+拉杆传感器构成的闭环控制系统来实现8缸同步,且同步行程误差控制在±20 mm。利用比例放大器实时采集并放大拉杆传感器的长度信息(拉杆传感器实时反映折叠液压缸的行程),通过同步控制策略来实时调整各液压缸活塞杆伸出速度,从而实现折叠液压缸闭环同步控制。8缸同步控制策略具体如下。
根据左/右阵面折叠的时间指标推算出电流型比例阀的开口大小(即输出模拟量大小),这里将与时间指标对应的输出模拟量值匹配液压缸活塞杆伸/缩速度称之为液压缸基准速度。为保证折叠液压缸活塞杆伸出或缩回的速度相同,由于液压缸无杆腔所需流量较有杆腔大,所以液压缸活塞杆伸出的输出模拟量值较缩回的输出模拟量值大一些。
左阵面1—4缸同步控制策略:先对4根缸对应的比例阀给定同样的电流模拟量,即给定4根缸同样的基准速度。在运动过程中,实时根据采样拉杆传感器的长度数据对缸的比例阀电流进行动态调整,实现对缸活塞杆伸出/缩回速度进行动态调控,使4缸的行程误差在规定范围内,实现对4缸实时同步控制。具体控制模式为比较缸2和缸3的伸/缩速度,速度慢的缸向速度快的缸逼近,这两缸的比例阀的增益设为G1(数值居于G2与G3之间)。缸1的速度以缸2的速度为基准并向缸2的速度逼近,缸4的速度以缸3的速度为基准向缸3的速度逼近,这两缸的比例阀的增益设为G2(数值较大),可得缸1的比例阀电流=基准速度电流+缸1-2速度差值×G2,同理缸4的比例阀电流=基准速度电流+缸3-4速度差值×G2。
按照左阵面1—4缸同步控制策略对右阵面1—4缸进行同步控制。为保障左/右阵面折叠同步,可对左阵面缸2和缸3的速度平均值与右阵面缸2和缸3的速度平均值进行对比,平均速度慢的两缸向平均速度快的两缸逼近,此时比例阀的增益设为G3(数值较小)。
2.4 天线面精度控制
天线面精度是通过高刚性中阵面、左/右阵面展开到位机械定位和左/右阵面折叠液压缸展开到位行程不变(通过夹紧器锁定实现)来实现。天线中阵面采用框架结构,具有高刚性。左/右阵面各采用4根液压缸实现折叠,液压缸的缸体和活塞杆均为刚性结构,活塞杆采用夹紧器机械锁定结构,具有高刚性。当左/右阵面折叠到工作状态时,左/右阵面与天线中阵面有4根定位面实现机械定位。同时左/右阵面的4根折叠液压缸带有夹紧器实现对液压缸活塞杆的可靠锁定(使得液压缸缸筒和活塞杆变成一根刚性杆),使左右阵面与中阵面形成一个类整体的结构,保证了整个天线阵面有足够刚性和面精度。
2.5 液压系统设计
天线折叠液压系统原理如图3所示[4]。为保证系统功能的实现,采用伺服电机驱动液压泵作为液压系统的动力源。
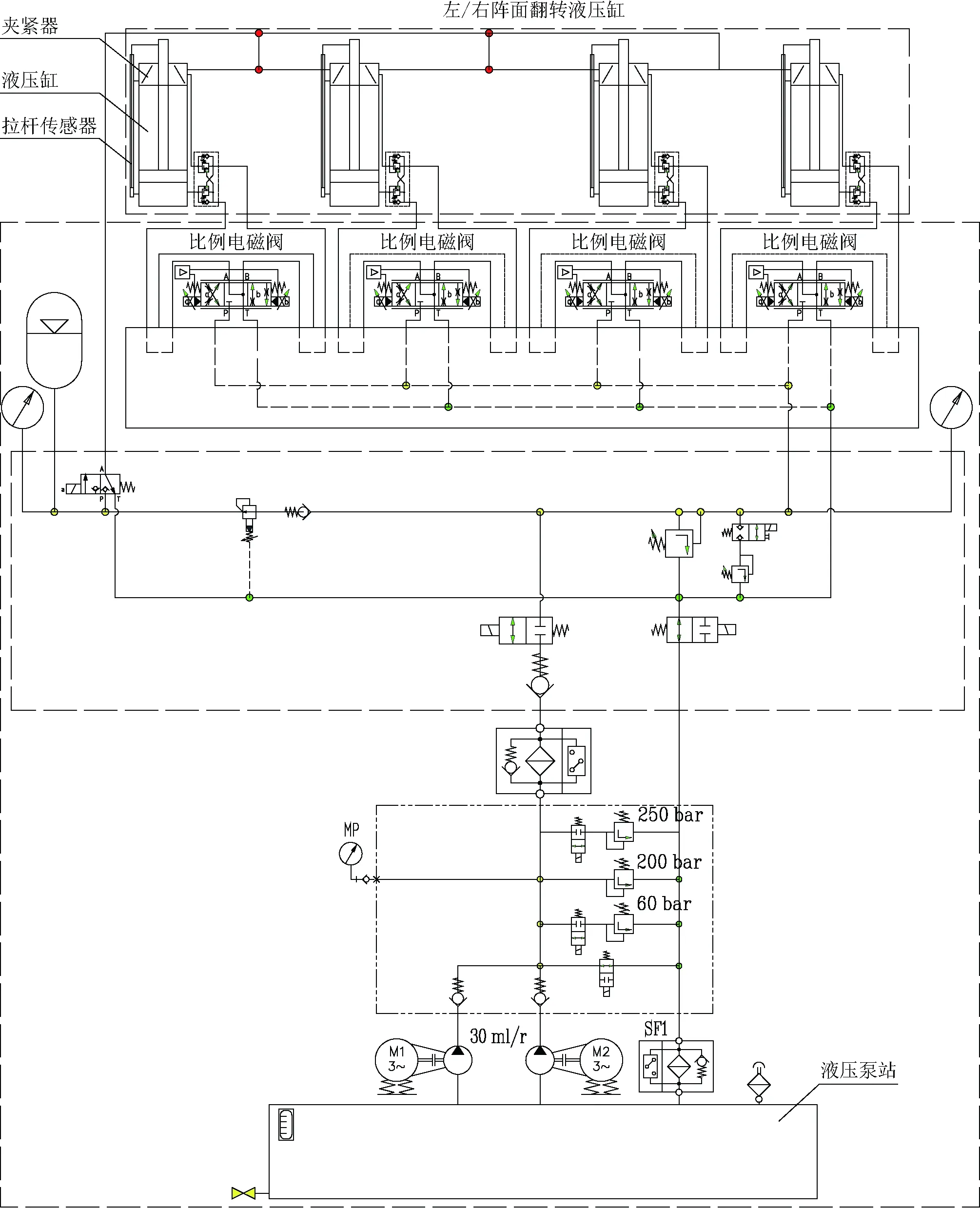
图3 液压系统控制原理
伺服电机可以根据天线展开或收拢时进行有效调速,保证天线在整个动作过程中既无冲击又无颤抖。在液压系统中采用了换向阀、液压比例阀、单向阀、溢流阀、平衡阀、液压锁、防爆阀、压力表等器件。换向阀用于控制液压缸输出轴的伸出与收回,从而控制天线阵面的仰起与俯下、伸出与收回。液压比例阀用于调整液压缸运动速度。单向阀用于防止系统长期不工作时液压缸和管路中液压油的回流。溢流阀用于控制整个系统的压力。平衡阀用于保证平衡重力和风载,驱动液压缸同步运行,保证液压缸运动平稳可靠。防爆阀用于防止当系统管路突然失效时天线上阵面发生跌落失效,压力表用于检测管路油压。
3 天线刚强度仿真
以天线阵面三维模型作为仿真分析对象,负载为自重和风载荷,约束位置是天线与俯仰座连接处和天线与俯仰液压缸连接处。采用有限元法分析天线在8级风速时的刚度和12级风速时的强度变化[5]。分析结果表明,天线阵面最大变形量为6.9 mm,最大应力为163 Mpa,刚强度满足指标要求。
4 试验测试
4.1 液压缸同步精度测量
边块阵面两个相邻液压缸展开和收拢过程中同步控制误差实测曲线如图4所示。由实测曲线图4(a)可知,展开过程中两相邻液压缸误差值均控制在±6 mm以内,满足设计指标要求;由实测曲线图4(b)可知,收拢过程中两相邻液压缸误差值均控制在±10 mm以内,满足设计指标要求。对比图4(a)和图4(b)可以发现,收拢过程中同步误差较展开过程中较大,主要原因是收拢过程时间短,速度较快,系统延时及响应致使收拢时误差较大,但均满足设计指标要求。
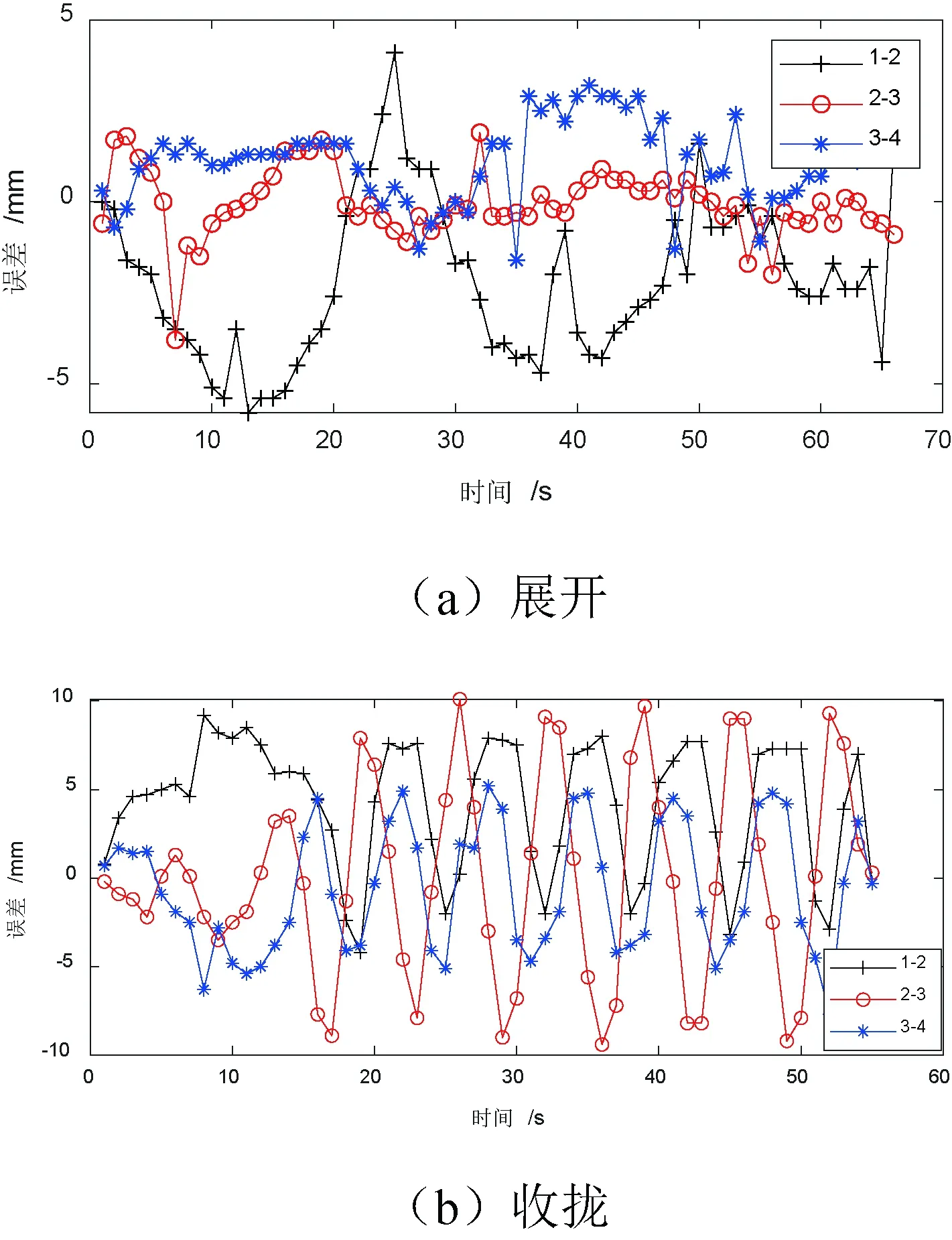
图4 液压缸同步精度实测曲线
4.2 天线面精度测量
为验证刚强度分析的真实性及偏差,本文对天线阵面工作状态时的面精度进行了实测,如图5所示。水平方向等间距选择11个点,垂直方向等间距选择18个点,共计测试198点。如图6所示给出了阵面坐标点变形量曲线,由图可知,阵面最大变形量为3.4 mm(<15 mm),天线阵面实测的面精度均方根值为1.2 mm(<5 mm),均满足指标要求。
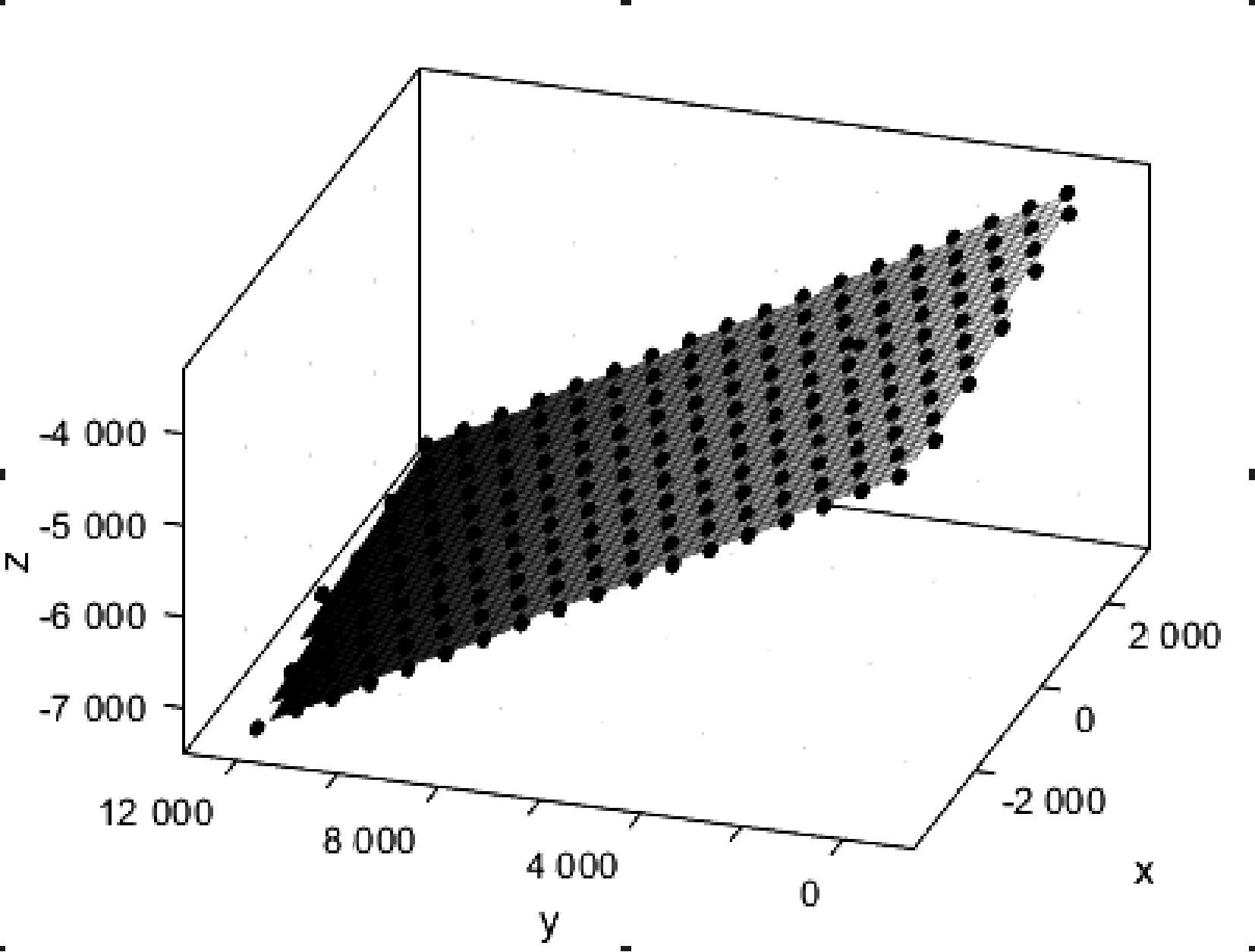
图5 阵面坐标点布置情况
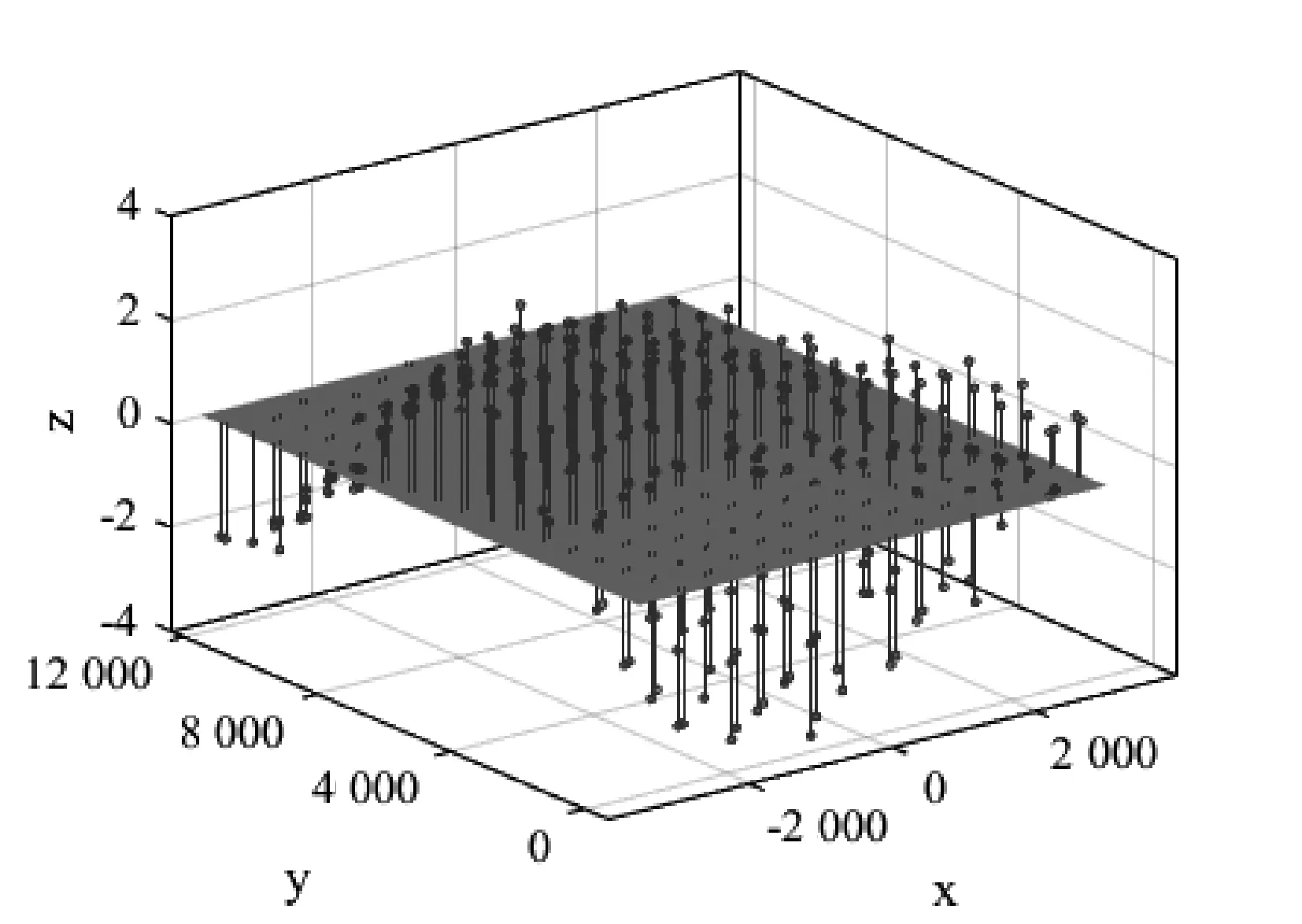
图6 阵面坐标点变形量
5 结语
本文设计了一种大高厚比长薄天线多缸同步控制策略,满足长薄天线快速展开/收拢的同时,实现了长薄天线多缸高刚性高精度的同步,为大口径长薄米波雷达天线折叠同步控制和精度测量提供了理论依据,并在实践中得以应用,具有较高的推广价值和借鉴意义。
(1)通过多次实测,天线展开平均时间为65 s,天线收拢平均时间为54 s,满足指标要求。
(2)对液压缸展开和收拢行程误差进行实测,行程误差均在± 10 mm左右,满足指标要求。
(3)通过拍照法实测,天线阵面最大变形量为3.4 mm,均方根1.2 mm,满足精度要求。
猜你喜欢
电子机械工程(2022年2期)2022-04-25 08:05:22
科技研究·理论版(2021年20期)2021-04-20 01:13:14
舰船电子对抗(2021年1期)2021-04-15 06:11:42
制造技术与机床(2017年2期)2017-05-04 04:17:24
系统工程与电子技术(2016年4期)2016-08-24 07:46:02
火控雷达技术(2016年2期)2016-02-06 02:29:06
火控雷达技术(2016年2期)2016-02-06 02:29:04
舰船科学技术(2015年8期)2015-02-27 15:38:46
航天返回与遥感(2014年5期)2014-07-31 17:57:09
电子机械工程(2013年3期)2013-09-16 03:25:09
