
供热隧道智能巡检机器人末端位姿控制研究
2023-08-21 01:42徐平平
机械设计与制造工程 2023年7期
徐平平,郑 飞
(国能宁夏供热有限公司,宁夏 银川 750004)
供热隧道巡检机器人主要以轨道移动的方式巡检[1-2],其被广泛应用于矿井、石油化工等领域。智能巡检机器人本身具备并联结构,有着稳定性强、动态性能高等优势,而供热隧道巡检机器人在巡检期间,其末端操纵杆的姿态能够较好地反映机械人的动作状况。由于智能巡检机器人由许多分支组成,导致其内部结构比较复杂,在正常巡检期间会遮挡自身支路,致使末端位姿控制错误。为解决这一问题,需要进一步研究供热隧道智能巡检机器人末端位姿控制方法。
杨学军等[3]根据运动过程还原法,提出液压支架巡检机器人位姿控制方法,对机器人的位姿进行控制,以确定机器人的位姿结构,构建位姿坐标系,计算出位姿与实际位姿的差值,完成最终控制,但通过该方法得到的结果有误差,存在控制结果不佳的问题。唐宇存等[4]提出一种基于三坐标测量机的机器人位姿精度控制方法,在一个平面中放置3个标准球,根据机器人定位原理建立机器人位姿控制平台,通过该平台对机器人性能进行控制,有效计算出机器人关节之间的位姿距离,实现机器人位姿精准测量,该方法的计算结果不完善,位姿转角控制结果存在误差。戴厚德等[5]提出一种基于光学运动跟踪系统的机器人末端位姿测量与误差补偿方法,以增强控制精度,实现精准测量,然而该方法的映射结果不佳,控制性能低。为了解决上述方法的不足,本文针对供热隧道智能巡检机器人设计一种末端位姿控制方法。
1 计算机器人末端位姿误差
1.1 供热隧道智能巡检机器人运动学正解坐标系
供热隧道智能巡检机器人结构特殊,内部有两个平台,各个支链与这两个平台相连,带动机械臂转动。根据该巡检机器人的结构,确定运动坐标系,如图1所示。
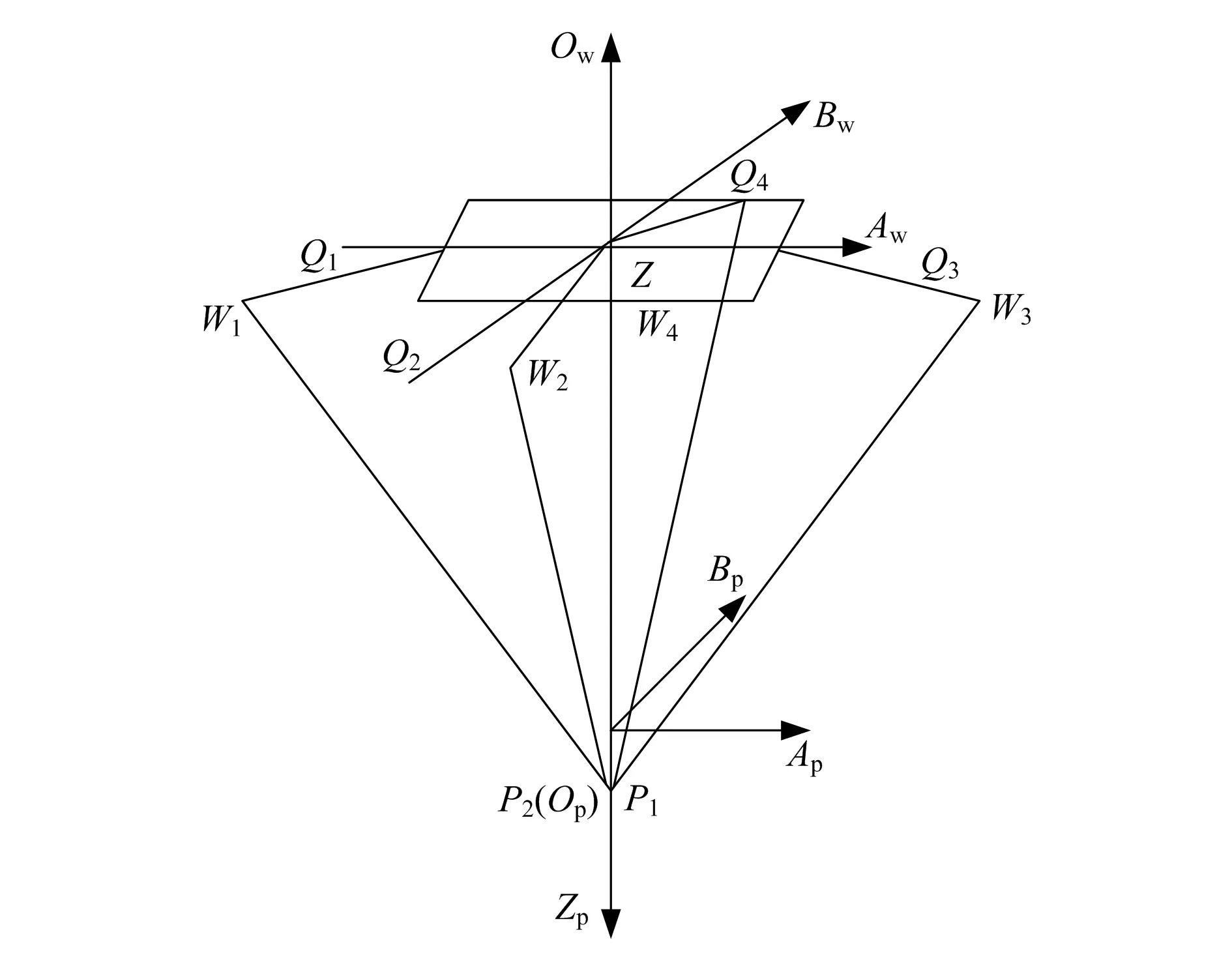
图1 机器人运动坐标系
图1中,在静平台中构建世界坐标系{Z-AwBwQw},记作{W};在动平台构建机器人目标坐标系{Op-ApBpZp},记作{P}。根据所构建的坐标系可知,当原点为Z时,目标点Op会与点阵圆形标定板的中心点P2重合,因而设定静平台中心点P1为机器人末端位姿。
获取静平台中心点P1在机器人运动坐标系中的位置矢量Rz:
Rz=ei+Q1ui+Q2ωi
(1)
式中:ei为机器人平移向量,Q1、Q2为机械臂杆长,ui为关节长度,ωi为机器人运动坐标系中的位置单位矢量。
由机器人目标坐标系得到机器人任意一种坐标位姿T,计算公式为:
(2)

确定运动学正解坐标系函数公式为SF[6-7]:
(3)
式中:HG为连接机器人关节的转角,HH为机器人关节之间的杆长,JK为偏距。
为了减少供热隧道智能巡检控制区域过大造成的时间损耗,提高控制精度,需要根据机器人运动学正解计算末端位姿控制差值。
1.2 末端位姿控制差值计算
依据机器人结构,采用确定的运动学正解坐标系,提取机器人特征点,确定机器人末端位姿参数。
假设运动学正解坐标系中,左相机获取的机器人像素坐标为p1(u1,v1),其中u1、v1表示左相机像素点,右相机获取的机器人像素坐标为pr(ur,vr),其中ur、vr表示右相机像素点。根据机器人在静平台中所构建的正解坐标系,确定机器人左、右坐标系的投影矩阵,假设s1、sr为比例因子,Pw为三维空间坐标,则投影矩阵定义如下:
(4)
式中:Y1、Y2分别为左、右投影向量,M1、Mr分别为左、右投影参数值。将所获得的左右像素点代入公式(4),得到该机器人的三维坐标,并根据公式(4)确定该机器人的最终位置。由于标定板与机器人的末端执行器位置具有不变性,因此基于仿射变换获取末端旋转矩阵M:
(5)
式中:M11、M12、M13、M21、M22、M23、M31、M32和M33均为末端旋转矩阵内旋转因子。
由此可得供热智能巡检机器人末端位姿参数O:
O=M+L
(6)
式中:L为平移矩阵。
基于末端位姿参数O,与获取的机器人运动学正解进行误差计算,获得末端位姿控制差值ε:
(7)
式中:γ为末端位姿参数,ω为权重,R为旋转系数。
由此完成了供热智能巡检机器人末端位姿控制差值计算。
2 RBF神经网络的末端位姿误差补偿
2.1 构建RBF神经网络模型
构建径向基函数(radial basis function,RBF)神经网络结构,计算RBF神经网络输出yk:
(8)
式中:Φj(X)为第X个神经单元,h为神经网络输出的最大值,ωkj为连接权系数。由此实现了RBF神经网络模型的构建,如图2所示。
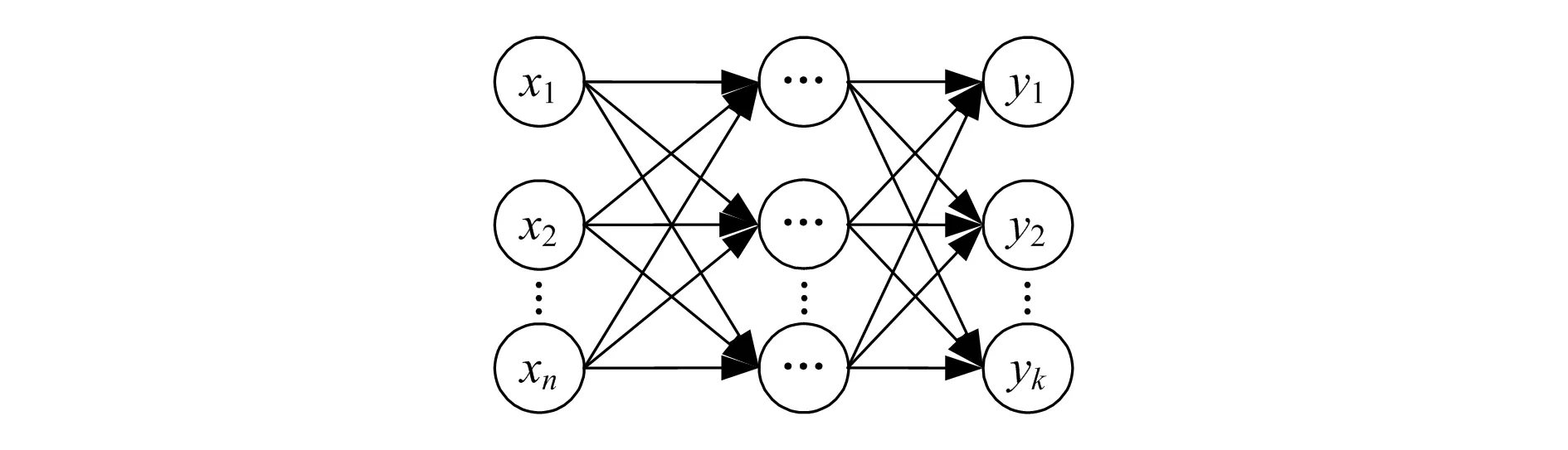
图2 RBF神经网络结构示意图
将机械臂末端位姿控制差值作为输入样本,利用构建的RBF神经网络模型对输入样本实施训练[8-9],并根据最终输出结果对机器人运动学正解实施误差补偿,实现末端位姿控制,使误差降到最低,从而计算出末端位姿误差。
2.2 机器人末端位姿误差补偿
供热隧道智能巡检机器人工作过程中,将机械臂末端位姿控制差值作为输入样本,将RBF神经网络的输入和输出的数值范围设置为[0,1],并根据样本集合,假设x0i,min、y0i,min分别表示样本x0i、y0i的最小值,对其归一化处理[10-11],假设xi、yi为样本集合,定义为:
(9)
式中:x0i,max、y0i,max分别为样本x0i、y0i的最大值。
根据上述样本集合的计算结果获取机器人的实际训练样本集,确定RBF基函数中心位置,训练样本数据,以取得样本集合网络输出值,进而对巡检机器人末端位姿进行误差补偿,实现末端位姿控制[12],步骤如下:
步骤1,选取合适的高斯函数变异值,确定存储在神经网络矩阵中的采样向量,并通过计数器进行采样向量数据的计数;
步骤2,以第一个学习样本为主,在样本数据上构建一个聚类中心;
步骤3,从第二个样本开始,获取聚类的中心位置,在此基础上,添加一个隐含层至RBF神经网络中;
步骤4,当训练机器人输入输出值确定时,调整网络参数和网络结构。
通过上述步骤可知,单元矢量r的大小决定了RBF神经网络的泛化能力,则基于RBF神经网络的最终训练输出值f(Xk)为:
(10)
式中:Xk为单元中心,Ci为高斯单元数量。
最终通过训练输出值,实现机器人末端姿态控制结果的误差补偿,完成机器人末端位姿控制。
3 实验与分析
3.1 实验环境
为了有效开展供热隧道智能巡检机器人末端位姿控制测试,选取宁夏境内某供热隧道内连续100 m的路段作为实验场地。选择智能巡检四足机器人作为研究对象,搭载ROS机器人操作系统,驱动系统为液压传动,机械臂为六自由度操作设备,感知系统为激光传感器,人工交换系统为信息显示装置,控制系统为程序闭环轨迹控制装置。智能巡检机器人示意图如图3所示。

图3 智能巡检机器人
3.2 实验工况
供热隧道风流相对湿度为80%~93%,风流温度为10~30 ℃,风流速度为5~10 m/s,大气压为3.0~4.5 kPa。具体工况环境如图4所示。

图4 供热隧道实际场景
智能巡检机器人在供热隧道中需完成障碍跨越,通过前足关节旋转,带动后足跨越电缆、管道、台阶等障碍。
3.3 实验结果与分析
3.3.1负载转动角度分析
智能巡检四足机器人在跨越障碍时,负载转动角度为极限状态,此时关节旋转角度误差处于0.5°~1.2°,表明末端位姿控制精度较高。设定柔性关节的传动比为50,传动部分等效扭转刚度为12.3 N·m/rad,负载端的转动惯量为9.375×106kg·m2。运动45 s获取智能巡检四足机器人在不同关节配置模式下的跨越障碍负载转动角度,结果见表1。
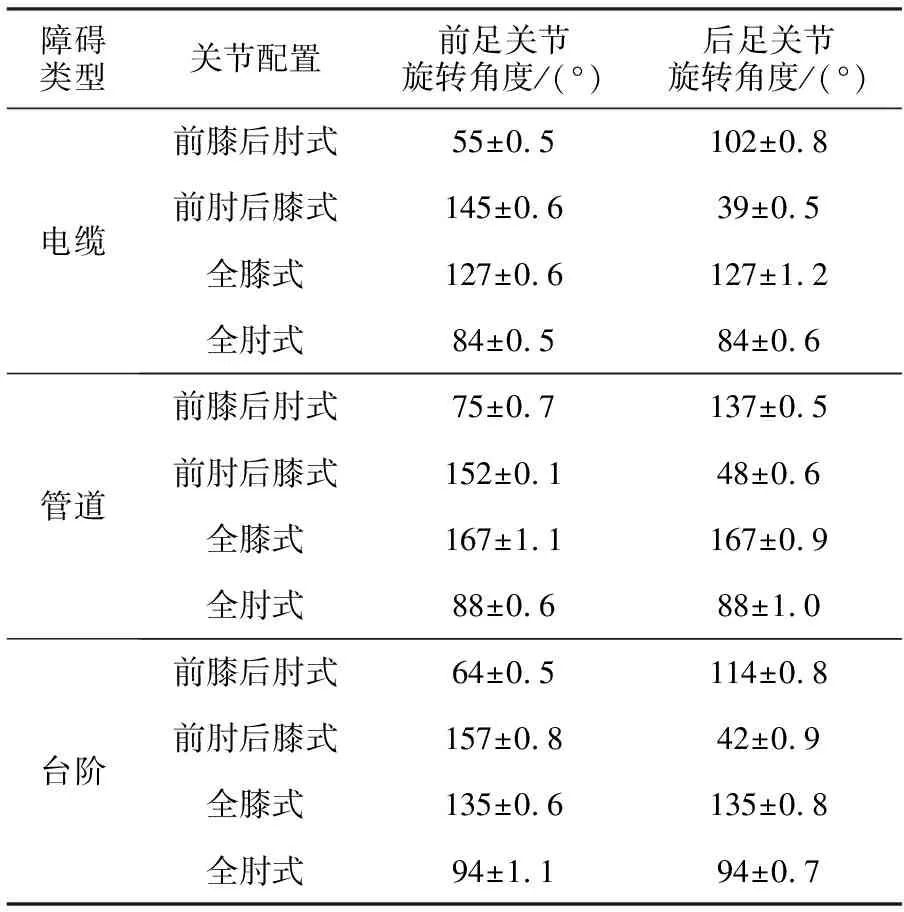
表1 负载转动角度
根据表1结果可知,智能巡检四足机器人在跨越障碍时,前足关节旋转角度误差最大值为1.1°,后足关节旋转角度误差最大值为1.2°,处于跨越电缆障碍状态。由此可知,负载转动角度误差均处于可控范围内,表明智能巡检机器人末端位姿控制效果较优。
3.3.2驱动力矩分析
驱动力矩是指驱使智能巡检四足机器人机械臂转动的力矩,机械臂前3个关节确定移动位置,后3个关节确定末端执行器姿态。驱动力矩与原动件的角速度方向相同,表明机器人驱动力矩方向发生改变。当智能巡检四足机器人开始移动、倾斜跨越障碍时,足端质心位置发生变化。随着质心位置的改变,当机械臂驱动力矩与质心位置呈正比,表明智能巡检四足机器人抗外部阻力优,末端位姿绕X轴、Y轴、Z轴转动效果佳。驱动力矩结果如图5所示。
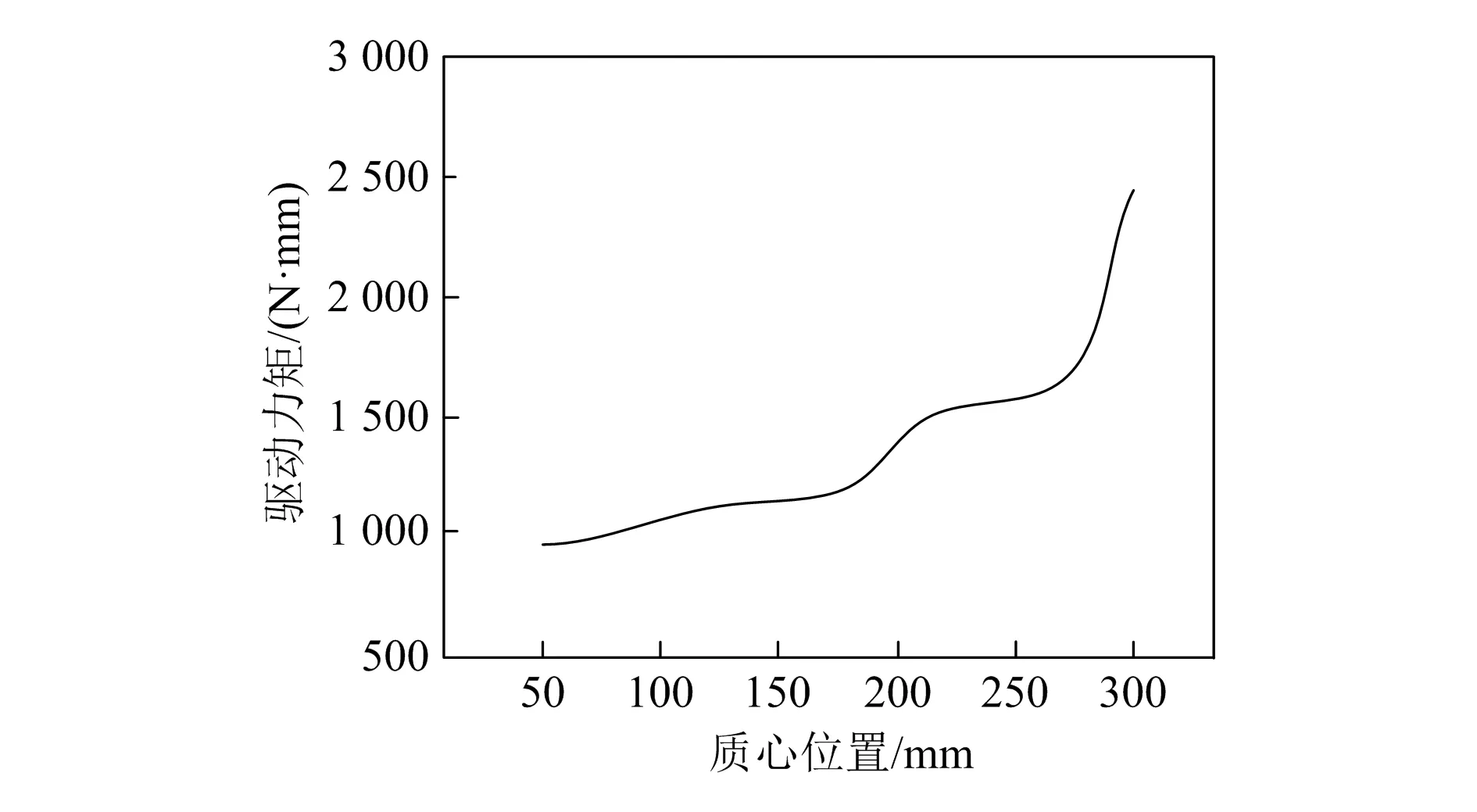
图5 驱动力矩结果
由图5可知,智能巡检机器人的驱动力矩随着质心位置的移动而增加,且驱动力矩呈上升趋势。这是因为通过所提方法建立末端旋转矩阵,可以获取智能巡检机器人各关节变量与位姿运动学关系,通过调节机械臂的驱动力矩,能够使机器人沿着任意期望位置进行移动。
3.3.3稳定状态偏移量分析
X轴、Y轴、Z轴之间的位置变化情况能够反映智能巡检机器人移动过程中的动态运动控制效果。X轴、Y轴、Z轴之间的位置变化波动平缓,表明智能巡检机器人移动过程中的偏移量较小,处于稳定状态。在负载为25 kN、角度分辨率为0.13°、加速度为0.8 m/s2、运动时间为45 s时,获取智能巡检机器人X轴、Y轴、Z轴的标定线性结果。稳定状态偏移量结果如图6所示。
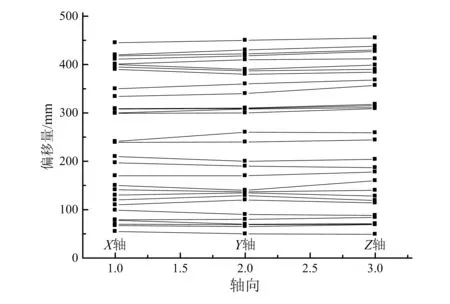
图6 稳定状态偏移量结果
根据图6结果可知,智能巡检机器人在X轴、Y轴、Z轴向上的位置输出特性基本一致,偏移量较小。这是因为所提方法构建的RBF神经网络模型结构,对智能巡检机器人末端位姿进行误差补偿,改善了末端位姿控制效果,保证智能巡检机器人处于稳定状态。由此表明,智能巡检机器人动态运动稳定性较优,可以完成供热隧道巡检任务。
4 结束语
供热隧道智能巡检机器人末端位姿控制性能不佳会影响巡检效果,针对这一问题,本文提出一种供热隧道智能巡检机器人末端位姿控制方法,通过计算得到机器人的运动学正解与视觉机器人末端位姿控制差值,将该差值作为模型输入样本,根据训练输出值结果,对智能巡检机器人末端位姿进行了姿态误差的修正,从而实现机器人最终末端位姿控制。该方法在并联末端位姿控制方面发挥着重要作用,在供热隧道智能巡检方面发展前景广阔。
猜你喜欢
煤气与热力(2022年3期)2022-03-29
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年5期)2016-11-07
光学精密工程(2016年4期)2016-11-07
航天制造技术(2016年6期)2016-05-09
湖北工业大学学报(2016年5期)2016-02-27
工程建设与设计(2016年1期)2016-02-27
探测与控制学报(2015年4期)2015-12-15
风能(2015年4期)2015-02-27
