
自动驾驶车辆队列控制策略研究
2023-08-18 06:37柳祖鹏陈玲娟谭志鹏
机械设计与制造 2023年8期
张 涛,柳祖鹏,陈玲娟,谭志鹏
(武汉科技大学汽车与交通工程学院,湖北武汉 430065)
1 引言
智能交通系统(Intelligent Traffic System,ITS)中,车辆与路侧单元和周边车辆可以进行实时的信息交互,随着5G通信技术的快速发展,这使得车载系统不再仅仅辅助驾驶员驾驶车辆,精准的信息传递让智能网联和自动驾驶汽车的实现成为可能。自动驾驶汽车可以按照一定的控制策略形成车队,在公路上高速稳定行驶,可以提高道路流量,缓解交通拥堵等现象。
目前各学者通过不同方法对车队控制策略进行研究。文献[1]建立智能车队行驶过程中纵向动力学模型,建立智能车队领航车驾驶员模型,通过Matlab/Simulink/Stateflow平台搭建数学模型。验证了模型的正确性和合理性,可达到提高驾驶安全性、减少交通堵塞的目的。文献[2]提出一种车−路协同环境下的信号交叉口速度引导策略,将被引导车辆及其后的普通车辆视为一个车队,基于微观交通仿真软件VISSIM 和MOVES 排放模型进行仿真,表明所提出的速度引导策略能显著减少延误和车辆排队长度,提高车辆行驶效率,并显著降低车辆污染及排放。文献[3]对协同式自适应巡航控制系统(CACC)入手,通过对Vissim中的驾驶员行为模型文件进行再编辑和外部导入,对车联网与自动驾驶车辆的简单仿真研究,肯定了该系统对交通流的优化能力。文献[4]提出一种分层控制方法实现全速巡航功能,采用车辆动力学仿真软件并进行实车试验,证明了所设计控制器的有效性和实用性。文献[5]考虑了车载传感器的有限感知能力,使用线性矩阵不等式方法来提高车队的串联稳定性;文献[6−7]考虑了车辆性能的约束,采用模型预测控制方法来研究车队控制问题。文献[8−9]提出了一种适用于大规模platoon与自由车辆协同运动的管理协议和管理策略,采用H∞控制理论求解最优控制增益函数,改善和提升了道路性能和通信性能。文献[10]利用平台开展红灯状态、隧道行驶和匝道行驶三种道路环境对车队行驶状态影响的仿真实验,得出车队可以顺利通过路口红绿灯;在安全车速范围内车队进出隧道口时方向控制良好;匝道坡度分别为3%和5%时,车队均保持稳定车间距安全行驶。文献[11]提出了CE−RRT算法,设计了线性时变模型预测控制器,通过仿真验证了控制器对直线路径的完全跟踪,提高了智能汽车的驾驶安全性。文献[12]提出了旁车并线进入车队的跟车策略,并构建了考虑延时与误差反馈的联网巡航控制(CCC)系统,所提出的跟车策略可提升车辆的乘车舒适性与交通系统的安全性。文献[13]提出一种车队控制的通用可变时距策略,给出一种物理意义明确的可变行驶时距计算方法,更准确快速地控制车距安全。不但可实现车队与交通流的稳定控制,而且可改善车队综合性能。
上述研究大多是对车辆进行纵向控制,缺乏对横向控制的研究。这里以智能驾驶员模型为基础,提出纵向控制策略和横向控制策略相结合的车队行驶控制策略,使交通流行驶更加高效。这一控制策略可以改善道路交通,提高道路通行效率和交通安全水平,对今后自动驾驶车辆控制的发展有实际意义。
2 跟驰模型的选择
跟驰理论是运用动力学方法,研究在无法超车的单一车道上车辆列队行驶时,后车跟随前车行驶状态的一种理论,跟驰模型是用数学模型表达跟驰过程中发生的各种状态[14]。智能驾驶员模型(Intelligent Driver Model)是由Helbing、Treiber 等通过大量实验得到数据提出的,经验符合很好且易于标定,成功地用统一的模型形式描述从自由流到完全拥堵流的不同状态。杨达等利用实际数据对两种车辆跟驰模型进行对比,发现智能驾驶员模型的驾驶方式比最优行驶速度的驾驶方式具有更好的稳定性[15]。
此模型通过统一的形式,对车辆在自有流和拥堵流两种不同的跟驰模式进行描述。模型的公式如下:
模型中下标α表示第α辆车,下面均略去下标。式中:v—车辆该时刻速度;Δv—本车与前车的速度差;s—当前车距离前车的距离;s*—当前状态下驾驶员的期望间距;v0—理想速度;T—反应时间;amax—最大加速度;b—舒适减速度;δ—加速度指数;s0—静止安全距离参数;s1—与速度相关的安全距离选择参数。
但是此模型也存在不足之处,Steven E等学者推导出IDM模型具有良好的跟随性能,但响应速度慢,间隙变化大。覃频频等通过汽车制动性能测试仿真试验验证了智能驾驶员模型的不足,对比分析了改进智能驾驶员模型(Improved Intelligent Driver Model,IIDM)的优点。
这样,当前方车辆快速远离本车时,驾驶员认为前方是安全的,因而采用自由加速行为。这里将IDM 模型应用到加速度控制模块。
3 车队形成控制策略
这里通过提出纵向控制策略和横向控制策略对车辆进行控制,两种控制策略相互结合,方法为:当车辆无换道请求时,由纵向控制策略控制车辆形成车队稳定行驶;当车辆有换道请求时,先由横向控制策略控制车辆完成换道,再由纵向控制策略控制车辆进一步形成稳定行驶车队。基于VISSIM微观交通仿真软件,每辆车可以自动检测周围车辆。本车所在车道为0车道,相邻左边两个车道分别为1、2车道,相邻右边两个车道分别为−1、−2车道,本车下游车辆为1、2车辆,本车上游车辆为−1、−2车辆,这样所扫描到周围车辆就可以用二维数组表示,如图1所示。

图1 扫描周围车辆Fig.1 Scan Surrounding Vehicles
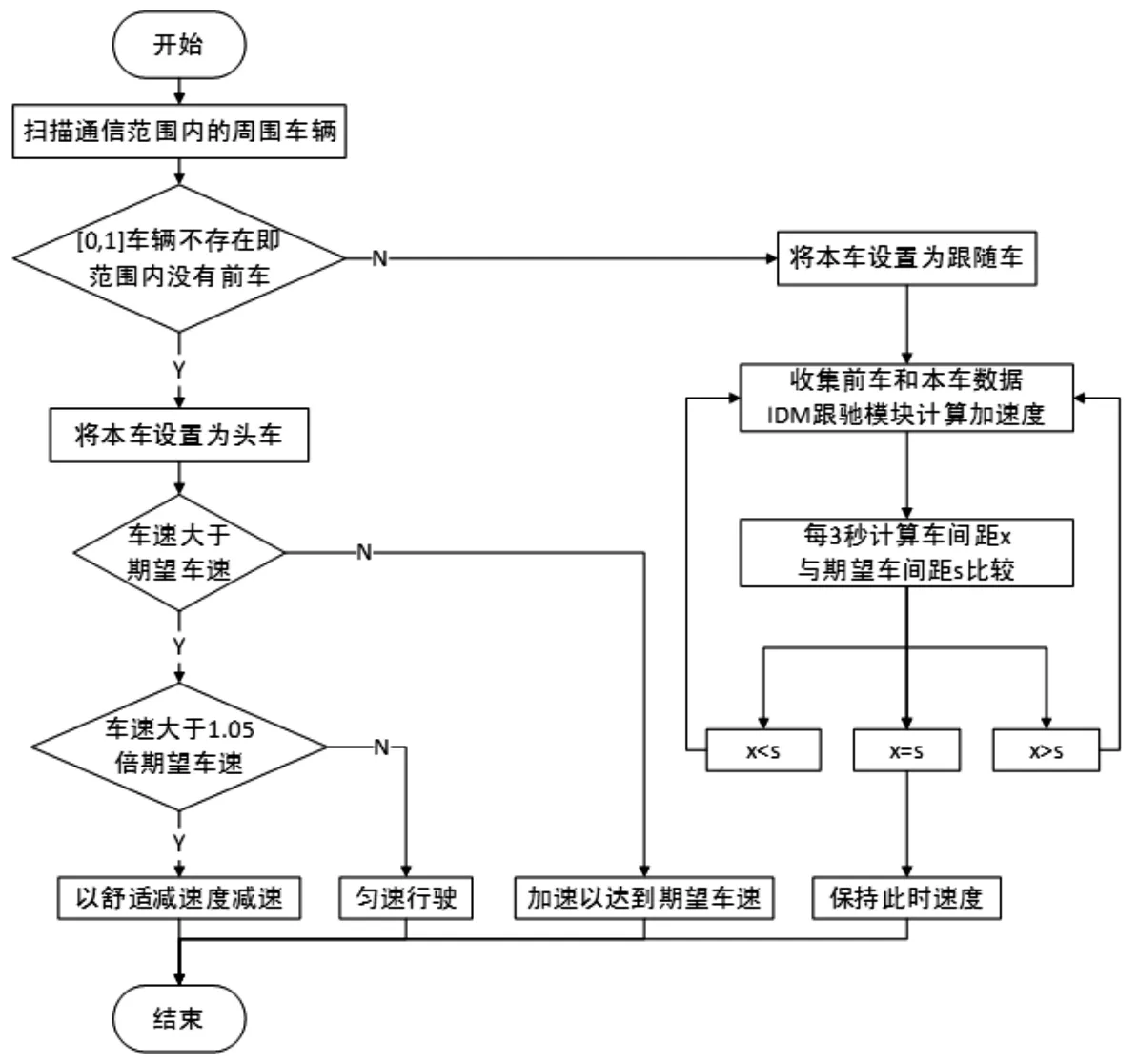
图2 纵向控制策略Fig.2 Longitudinal Control Strategy
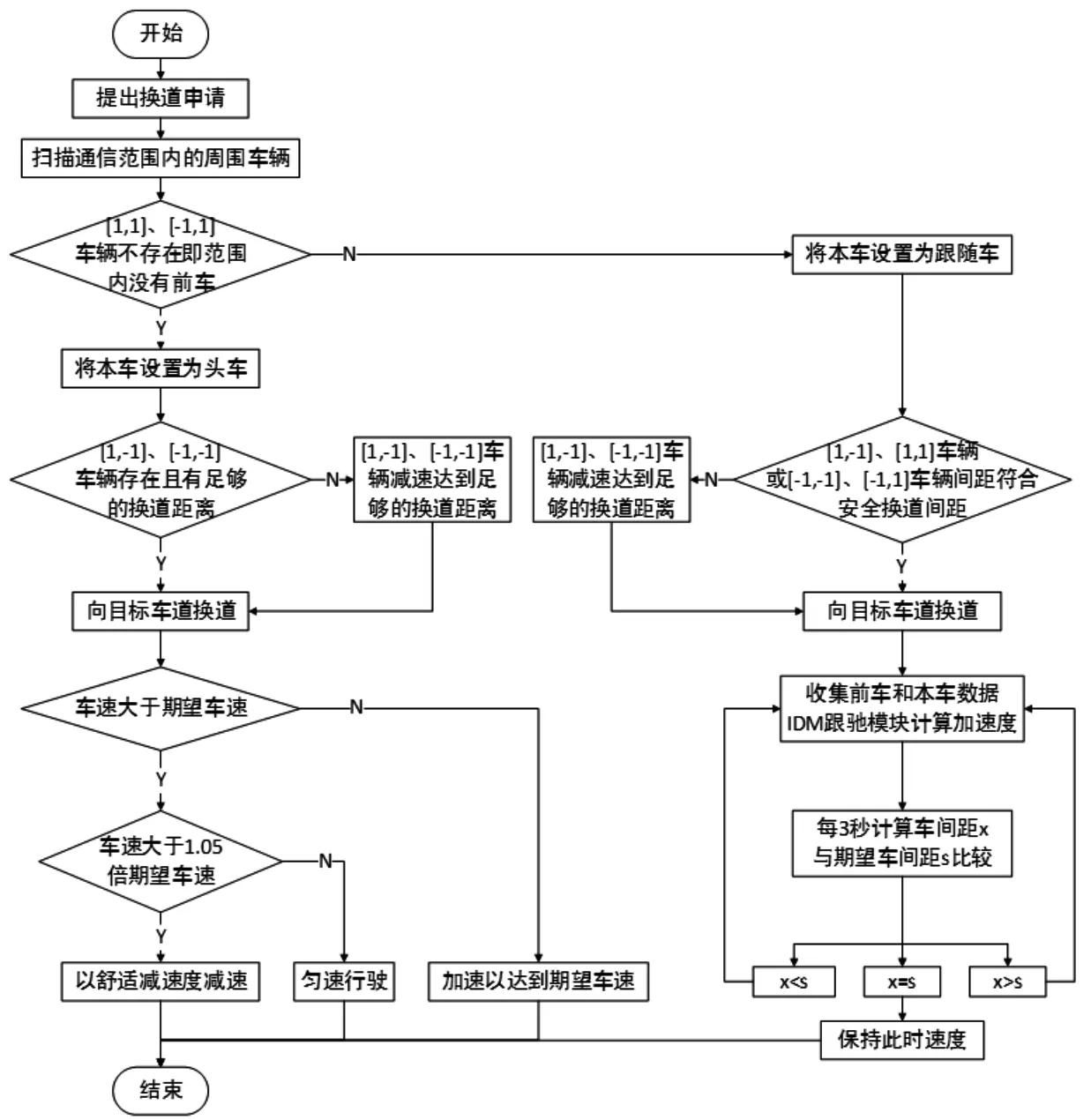
图3 横向控制策略Fig.3 Lateral Control Strategy
由于仿真软件和试验手段等限制,这里基于以下假设:
(1)道路上行驶车辆为100%车联网自动驾驶车辆。
(2)车联网实时通信,通信范围为300m。
3.1 纵向控制策略
纵向控制策略不涉及横向变道行驶,自动驾驶车辆通过检测与周围车辆之间的距离和速度形成车队,应遵循以下逻辑:
(1)扫描周围车辆,若通信范围内不存在前车[0,1],则将本车判定为头车。
(2)若此车判定为头车,此车车速大于期望车速时,以舒适减速度减速;若此车车速小于期望车速,则以正常加速度达到期望车速,并保持期望速度行驶。
(3)若通信范围内存在前车[0,1],则将本车判定为跟随车辆。
(4)若此车判定为跟随车辆,通过收集本车的速度、本车与前车的速度差、本车与前车的车间距等数据,通过IDM跟驰模块计算出合适的加速度,以与前车保持期望间距形成车队。
(5)每3s 计算一次本车与前车的实时车间距,并与期望间距比较,若等于期望间距,则保持此时的速度行驶;否则返回第(4)步。
3.2 横向控制策略
横向控制策略通过横向变道行为,在较短的时间内,使在扫描范围内的车辆编队成排,进一步形成车队,应遵循以下逻辑:
(1)车辆提出换道申请并扫描周围车辆,若目标车道没有前车即[1,1]、[−1,1]车辆不存在,则将本车设置为头车。
(2)若此车判定为头车,检测本车与目标车道后车的间距,若有足够的换道距离则换道;否则,后车即[1,−1]或[−1,−1]减速到有足够的换道距离后进行换道,如图4(a)所示。

图4 横向控制策略示意图Fig.4 Schematic Diagram of Lateral Control Strategy
(3)头车换道完成后,检测本车车速,若大于期望车速,以舒适减速度减速;若此车车速小于期望车速,则以正常加速度达到期望车速,并保持期望速度行驶。
(4)若目标车道有前车即[1,1]或[−1,1]车辆存在,则将本车设置为跟随车辆。
(5)若此车判定为跟随车辆,检测目标车道前车与后车即[1,1]、[1,−1]车辆或[−1,1]、[−1,−1]车辆的间距,若有足够的换道距离则换道;否则,后车即[1,−1]或[−1,−1]减速到有足够的换道距离后进行换道,如图4(b)所示。
(6)跟随车辆换道完成后,通过收集本车的速度、本车与前车的速度差、本车与前车的车间距等数据,通过IDM跟驰模块计算出合适的加速度,以与前车保持期望间距形成车队。
(7)每3s 计算一次本车与前车的实时车间距,并与期望间距比较,若等于期望间距,则保持此时的速度行驶;否则返回第(6)步。
4 仿真分析
4.1 仿真背景
如图5所示,以武汉市白沙洲大道城市高架部分路段为例进行仿真实验。路网全长2000m,道路模型为单向三车道,道路限速为70km/h,则设定期望速度为65km/h,带有出口匝道。
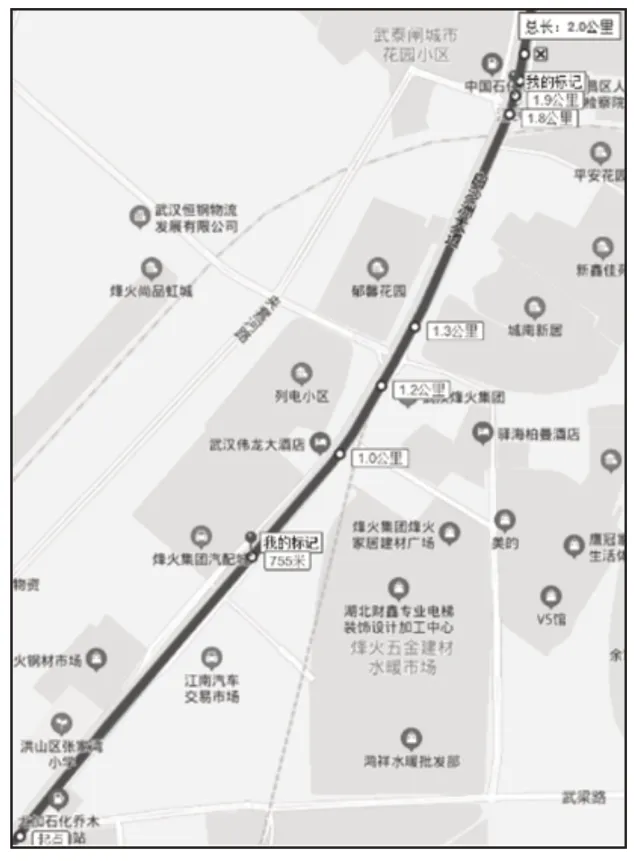
图5 仿真背景图Fig.5 Simulation Background Image
4.2 外部驾驶员模型DLL
VISSIM的外部驾驶员模型DLL接口提供了选项,可以通过完全用户定义的行为来代替内部驾驶行为,以模拟运行中的某些或所有车辆。用户定义的算法必须在用C/C++编写的DLL中实现,该DLL包含特定功能。在模拟运行期间,VISSIM会为每个受影响的车辆调用DLL 代码模拟时间步长,以确定车辆的行为。VISSIM 将车辆及其周围环境的当前状态传递给DLL,并且DLL计算车辆的加速/减速度和横向行为(主要用于车道变化),然后将车辆的更新状态传递回VISSIM,如图6所示。

图6 VISSIM与外部驾驶模型关系图Fig.6 Diagram of Relationship Between VISSIM and External Driving Model
这里通过编程软件Microsoft Visual Studio进行编程,实现头车判定模块、加速度控制模块、加速度模块计算等,DriverModel.cpp 与DriverModel.h 文件共同生成DriverModel_DLL 文件,由车辆类型外部驾驶员模型复选框调用该文件,实现对车辆驾驶行为的控制。
4.3 仿真参数设置
仿真场景为城市快速路段,分别在道路车辆组成为默认车辆组成和100%自动驾驶车辆组成的两种情况下进行仿真。仿真期间加载1500 辆/h 的交通量,设置车辆的期望速度为65km/h。为使数据更加精确,每1000m 设置一个数据检测点,并在每个车道设置相应的时间计数器和排队计数器,进行多次试验以测定行程时间和延误。仿真时间为3600s,数据记录时间围为(0~3600)s。仿真开始120s 左右,开始形成稳定车队,如图7所示。
图7 车队形成Fig.7 Platoon Formation
4.4 仿真数据分析
跟踪其中一个车队,分析其形成过程,如表1所示。车辆1进入路网后,将自身设为头车;车辆2进入路网在2车道,目标车道为3车道,经过横向控制策略控制,扫描周围车辆后将车辆1设为前车,并改变其目标车道,最终换道到1车道;车辆3进入路网在3车道,扫描周围车辆后将车辆2设为前车,最终换道到1车道;车辆4进入路网为1车道,将车辆3设为前车后继续行驶;车辆5进入路网在2车道,目标车道为3车道,经过横向控制策略控制,扫描周围车辆后将车辆4设为前车,并改变其目标车道,最终换道到1车道;车辆7进入路网在1车道,目标车道为2车道,经过横向控制策略控制,目标车道转换为2车道,将车辆5设为前车继续行驶。至此,车队车辆经过横向控制策略,全部完成换道。

表1 车辆换道过程Tab.1 Vehicle Lane Changing Process
车辆完成换道后,纵向控制策略扫描前车,收集本车与前车的相关数据,通过计算分配给车辆合适的加速度,形成稳定车队。车辆2和车辆3距离头车车辆1较近,在60s左右车速接近头车车速,跟车距离基本稳定,如图8、图9所示。车辆4、车辆5和车辆7距离头车较远,开始阶段以较大的车速行驶,迅速接近,在120s左右速度接近头车车速,在附近波动,跟车距离基本稳定。至此,6辆车车速、彼此间的跟车距离基本一致,稳定车队基本形成。通过多次试验测得以下数据,如表2所示。

表2 城市高架路段基本数据Tab.2 Basic Data of Urban Elevated Sections

图8 车队车辆速度时间关系图Fig.8 Diagram of the Relationship Between Platoon Speed and Time
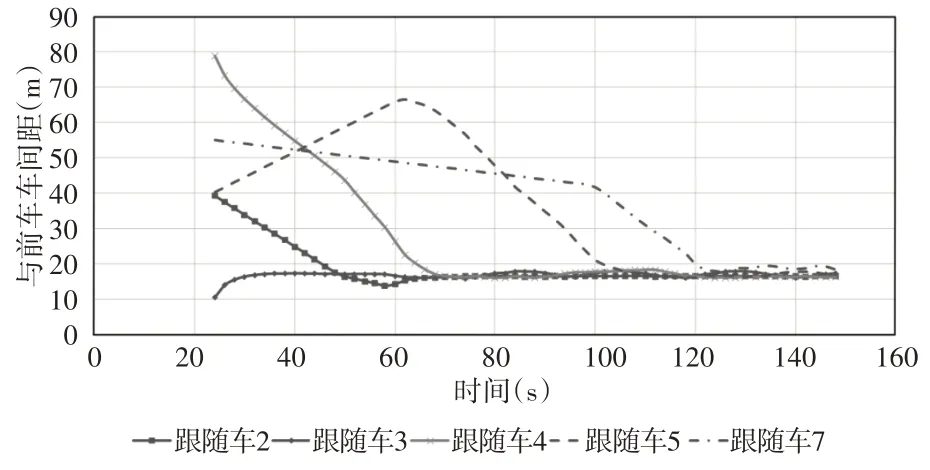
图9 车队车辆车间距时间关系图Fig.9 Diagram of Relationship Between Distance of Platoon Vehicles and Time
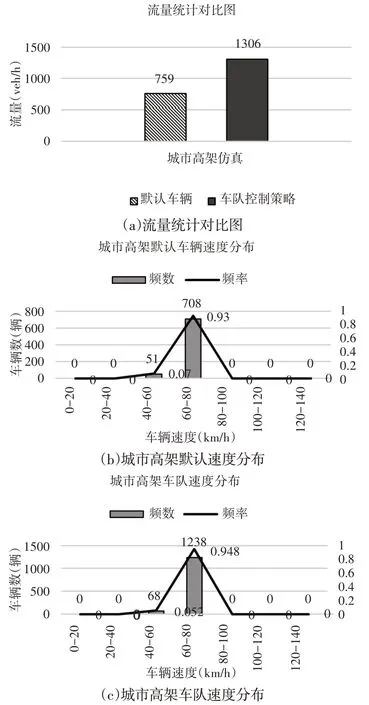
图10 仿真数据对比Fig.10 Simulation Data Comparison
仿真结果表明,控制策略协调下的车辆相对于默认车辆情形具有明显优势:交通流量增加72.1%,没有排队和停车现象,平均延误减小80%,是由于控制策略协调下的车辆在进入路段120s内会和自身附近车辆形成车队,稳定、有序地通过路段,而默认车辆组成人工驾驶车辆由于换道、加减速等需求的时间不统一性,车辆彼此之间影响较大,造成交通流量小、延误大的现象;速度分布都集中于期望车速附近,车队控制策略下的频率分布相对来说更为集中。
5 结论
这里通过提出以纵向控制策略和横向控制策略相结合的车队控制策略,在120s左右形成稳定车队行驶,与普通驾驶模式相比较,采用车队控制策略行驶后,流量增加、延误减小,并且在行驶过程中没有排队和停车,可以提高行驶效率,降低交通道路拥堵和车祸风险,充分体现自动驾驶车辆车队控制优势,对今后发展的自动驾驶车辆控制策略有积极意义。
这里所提出的控制策略是在道路行驶车辆为100%车联网自动驾驶车辆的情况,后续将在不同自动驾驶车辆渗透率下,自动与非自动驾驶汽车之间的相互协调和相互影响进行进一步研究。
猜你喜欢
测试技术学报(2023年2期)2023-04-06
科学技术与工程(2022年30期)2022-12-05
机械设计与制造(2022年5期)2022-05-19
重庆大学学报(2021年12期)2022-01-12
汽车电器(2021年12期)2021-12-30
晚晴(2020年8期)2020-12-03
装备维修技术(2020年3期)2020-11-20
人民交通(2016年9期)2016-06-01
中学生数理化·高一版(2008年6期)2008-11-15
