
基于里奥滤光器的太阳窄带观测系统全视场频率漂移高精度测量方法(特邀)
2023-07-03 06:46王希群吕卓王远方舟付玉谭旭金振宇
光子学报 2023年5期
王希群,吕卓,王远方舟,付玉,谭旭,金振宇
(1 中国科学院云南天文台,昆明 650011)(2 中国科学院大学,北京 100049)(3 云南省太阳物理与空间目标监测重点实验室,昆明 650011)(4 云南省应用天文技术工程实验室,昆明 650011)
0 引言
磁像仪等基于可调谐滤光器的太阳窄带观测系统可以对太阳大气的磁场、速度场等物理参数进行高空间高时间分辨率观测,是太阳物理观测研究的重要观测设备之一,广泛应用于空间和地基太阳观测系统[1]。目前正在空间工作的太阳窄带观测系统有美国太阳动力学天文台(Solar Dynamics Observatory,SDO)上的日震及磁像仪(Helioseismic and Magnetic Imager,HMI)[2],我国2022年发射的先进天基太阳天文台(Advanced Space-based Solar Observatory,ASO-S)上搭载的全日面矢量磁像仪(Full-disc vector Magneto Graph,FMG)[3]等。地基太阳望远镜也配备了基于滤光器的窄带观测系统,对光球、色球等太阳大气的流场和磁场进行观测研究。如云南抚仙湖太阳观测基地的一米新真空太阳望远镜(New Vacuum Solar Telescope,NVST)配备了观测色球的窄带成像观测通道,国家天文台怀柔观测站太阳磁场望远镜[4],美国大熊湖天文台的Goode 太阳望远镜(Goode Solar Telescope,GST)[6]、瑞典太阳物理研究所的瑞典太阳望远镜(Swedish Solar Telescope,SST)[8]、德国波茨坦天体物理研究所的GREGOR 望远镜[10]等望远镜均配备了磁像仪等太阳窄带观测系统。为实现太阳光球的高精度磁场和速度场测量,观测系统对系统线心精度提出了较高的要求。如HMI 为实现17 m/s 的视向速度测量精度[12],617.3 nm 处系统线心误差需小于0.035 pm,GST 的的近红外成像光谱偏振仪(Near-InfraRed Imaging Spectropolarimeter,NIRIS)在1.565 μm 波段要求线心误差小于0.6 pm[13]。ASO-S 的FMG 在532.4 nm 对系统线心稳定性的要求是优于2 pm。由于望远镜与太阳的相对运动、系统光学结构和滤光器加工和装配误差等原因,观测系统中心波长和标定的中心波长存在偏差存在,这种偏差称为系统频率漂移。系统频率漂移会导致对实际观测波长估计不准,从而严重影响太阳大气磁场和速度场等重要物理参数的测量精度。由于系统频率漂移有视场分布,为了对太阳大气的磁场和速度场进行高精度测量,需要在全视场范围内对系统频率漂移进行测量,在并在太阳大气的磁场和速度场测量过程中予以改正。
常用于太阳磁场和速度场观测的可调谐滤光器有基于多光束干涉的FP 滤光器和基于偏振干涉的里奥滤光器。其中里奥滤光器由于线心稳定性好等优点广泛应用于空间和地基太阳观测系统中。基于可调谐里奥滤光器的磁像仪频率漂移的原因主要包括观测系统相对太阳运动引入的多普勒频移,光轴入射角所产生的频率漂移,滤光器的线心误差等。其中观测系统相对太阳运动引入的多普勒频移可以通过运动模型进行估计,而滤光器的线心误差,光轴入射角所产生的频率漂移需要通过实测进行定标。由于系统频率漂移与光学系统密切相关,磁像仪通常利用磁场测量所需的太阳谱线对系统频率漂移进行测量和定标。云南天文台XU Zhi,WANG Liangkai 等提出了利用太阳谱线轮廓扫描法测量系统频率漂移误差和视场效应[14]。光电研究所WANG Jia 等在此基础上提出了利用白光成像通道联合观测,改正环境扰动对频率漂移测量的影响[16]。这些方法可以对太阳观测系统的平均频率漂移进行测量,也可以对不同视场的频率漂移进行较低分辨率的测量,但是其视场分辨率不足以满足太阳光大气磁场和速度场的高精度测量要求。为实现HMI 全视场频率漂移测量及改正,COUVIDAT S 等切换光学结构将望远镜入瞳成像,从而获得频率漂移结果[17],我国的FMG 也采用类似方法。改变光学结构进行频率漂移测定方便快捷,但定标光路与观测光路仍存在一定差异,使定标结果存在一定程度系统误差。
本文针对地基大口径太阳望远镜窄带观测系统存在的系统频率漂移问题,开展了全视场系统频率漂移的在线测量方法研究。系统频率漂移的全视场在线测量指的是利用太阳大气谱线轮廓扫描获得观测视场范围内的频率漂移的精细测量。全视场在线测量主要面临两个问题:1)在谱线轮廓扫描过程中,观测目标的空间和时间的强度起伏;2)由谱线轮廓高精度提取系统频率漂移的方法。本文提出了全视场系统频率漂移的在线测量方法,并在抚仙湖1 m 新真空太阳望远镜[18]的高分辨太阳光球观测实验系统进行了实测验证。
1 频率漂移在线测量方法
基于里奥滤光器的太阳窄带观测系统频率漂移与光学系统密切相关,因此要求频率漂移测量和实际观测的光学系统状态一致。利用系统观测的太阳大气谱线对系统频率漂移进行测量,可以最大限度的保证光学系统的一致性。太阳日面中心宁静区的太阳谱线不会出现多普勒频率漂移和塞曼效应引起的谱线展宽,可以作为标准谱线测量系统频率漂移。在太阳日面中心宁静区对观测的太阳大气谱线进行光谱轮廓扫描,分析其光谱轮廓可以估计系统频率漂移。利用曲线拟合或重心法从光谱扫描轮廓估计中心波长,从而测量系统频率漂移。扫描太阳大气谱线轮廓扫描测量系统频率漂移面临两个问题:1)如何从谱线轮廓扫描精确估计中心波长;2)高精度太阳日面中心宁静区也有光球米粒、色球针状物等空间结构,望远镜的跟踪误差和湍流大气导致谱线轮廓扫描过程中观测目标不一致。为此,在测量过程中让望远镜小范围内随机晃动,通过多帧采集平均平滑观测目标的空间结构。在谱线扫描轮廓估计中心波长时,采用高斯函数拟合方法。
1.1 高斯函数拟合太阳大气谱线轮廓
太阳日面中心宁静区的太阳大气谱线没有磁场引起的谱线展宽和太阳自转导致的多普勒频漂。利用基于里奥滤光器的观测系统对太阳大气谱线进行扫描,其光强轮廓为如式(1)所示,是太阳大气谱线与滤光器透过率函数的卷积。
式中,I(λ)为利用光谱扫描获得的光谱轮廓,ISP(λ)为标准太阳光谱,TFilter(λ)为观测系统中滤光器透过带轮廓。图1 是太阳光球中心波长为532.419 nm 的Fe I 吸收线的理想谱线轮廓和经过半极大值全宽(Full Width at Half Maxima, FWHM)为10 pm 的里奥滤光器扫描获得的谱线轮廓之间的比较。
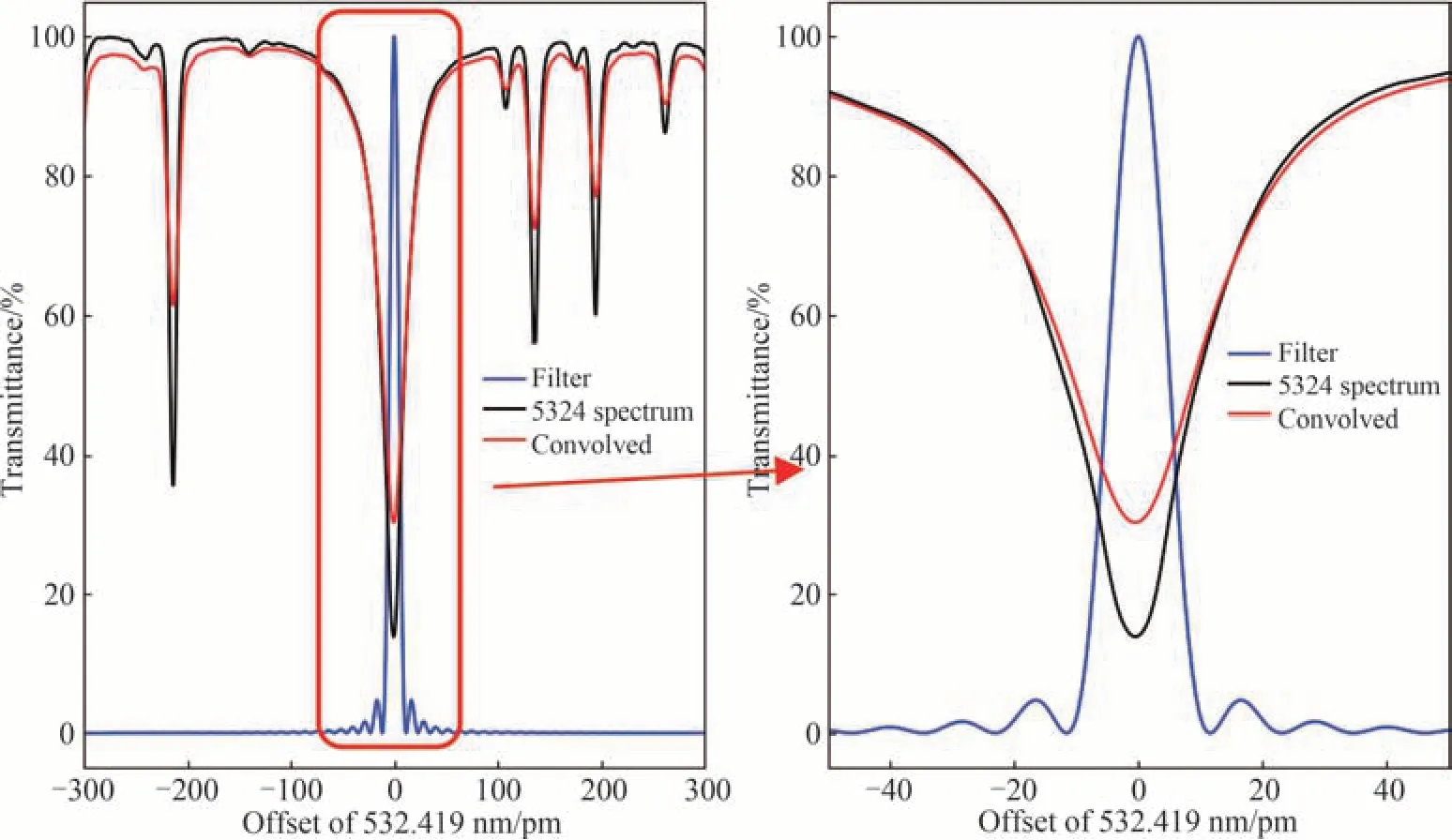
图1 太阳光球532.419 nm 吸收线与Lyot 滤光器轮廓卷积Fig.1 Convolution of 532.419 nm absorption line of solar photosphere and Lyot filter profile
经过观测系统扫描获得的太阳谱线轮廓在线心附近接近高斯函数,利用高斯函数拟合可精确测量中心波长位置。图2 为将模拟的10 pm 里奥滤光器扫描获得的532.419 nm Fe I 谱线轮廓在中心波长±5 pm 范围内进行高斯函数拟合的结果。模拟结果表明,当光谱强度根据连续谱强度归一化处理后,光谱线心±5 pm范围轮廓的高斯拟合残差最大值为5×10−4。
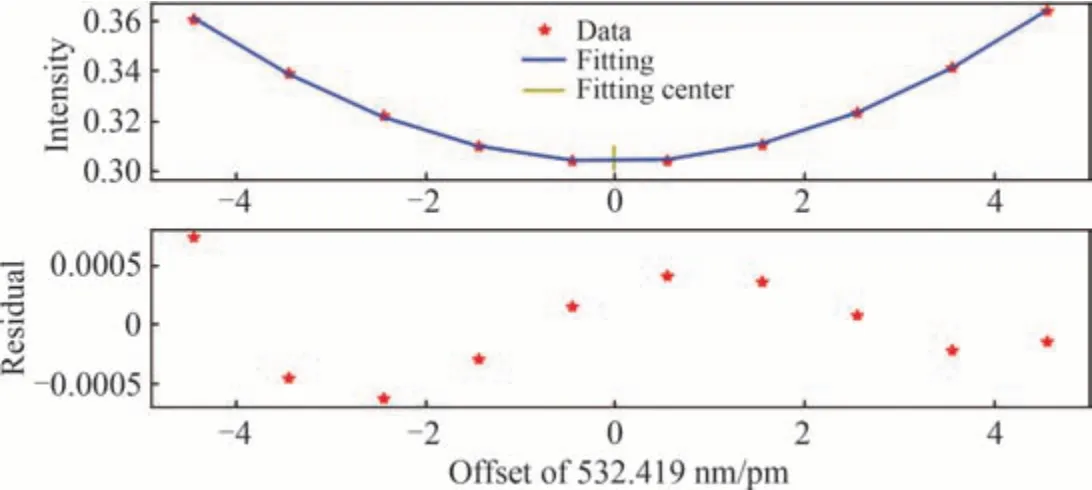
图2 光谱轮廓高斯拟合Fig.2 Gaussian fitting of spectral profile
谱线轮廓的扫描范围和步长根据观测谱线和观测系统以及测量精度要求进行调整。太阳光球的谱线相对较窄,谱线FWHM 通常在10 pm~25 pm 之间,要求滤光器的透过率FWHM 也很窄,通常为10 pm。为此,太阳光球观测系统扫描范围可以较窄,要更多考虑视场入射角等因素引入的频率漂移。如在532.419 nm Fe I 谱线,如果里奥滤光器安装在准直光路,正入射的视场和入射角为1°的视场频率漂移为约2 pm。考虑到系统频率漂移会因地球自转产生动态误差,适当增大光谱轮廓观测范围为线心±5 pm。对于Hα 等太阳色球谱线,由于谱线较宽,需要增大谱线轮廓扫描范围。
1.2 谱线轮廓高斯拟合误差分析
当利用高斯函数拟合谱线轮廓测量频率漂移时,光强随机起伏导致测量误差。光强随机起伏的因素主要有目标的空间结构、光子噪声和观测过程中的大气吸收的随机变化等。下面利用蒙特卡洛模拟法分析光强随机起伏对频率漂移测量精度的影响。
蒙特卡洛模拟过程为,在经过观测系统的理论谱线轮廓,叠加零均值高斯分布的随机起伏,生成有光强起伏的谱线轮廓模拟数据。对生成的模拟谱线轮廓数据进行高斯函数拟合,测量中心波长位置。在模拟过程中生成了10 组随机起伏RMS 不同的数据,每组数据有1 000 个谱线轮廓。随机起伏RMS 为测量范围内理论谱线轮廓最大最小值的差的1%,2%,3%,……,10%。图3 为模拟数据的测量误差统计结果。如图3左图所示,拟合误差呈零均值的高斯分布,拟合误差RMS 与光强起伏RMS 如图3 右上图所示,呈线性关系。光强起伏RMS 与拟合误差RMS 线性拟合结果如式(2)所示。
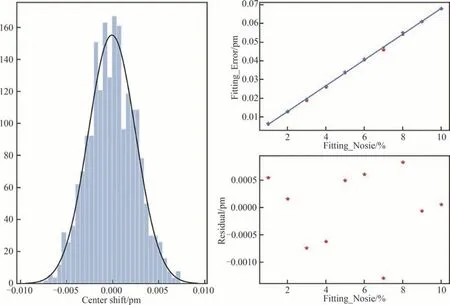
图3 光强误差统计及对拟合精度影响Fig.3 Error statistics and its influence on fitting accuracy
2 频率漂移测量实验
NVST 是我国最重要的地基太阳观测设备,在NVST 的太阳光球观测实验系统开展了全视场系统频率漂移的在线测量方法的实验研究。
2.1 NVST 高分辨太阳光球观测实验系统
高分辨太阳光球观测实验系统安装在NVST Coude 仪器平台上,光学配置如图4 所示。
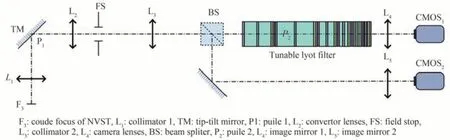
图4 测试系统光学配置Fig.4 Setup of the experimental system
NVST Coude 焦点F3处可切入切出视场定标单元,进行两通道探测器视场定标及齐焦调节[18]。分光镜控制窄带通道光强与宽带通道光强比为9∶1,放置合适参数减光片,保证两个通道曝光时间接近。Lyot 滤光器放置在准直光路中,透过带FWHM 最窄的级次放置在瞳面位置。两台探测器通过同步采集控制系统实现微秒量级同步采集,保证每帧采集的窄带图像强度可以被准确校正。详细系统参数见表1。

表1 测试系统关键参数Table 1 Key parameters of experimental system
2.2 频率漂移在线测量流程
基于太阳光球观测实验系统,开发了频率漂移测量数据采集及处理程序。系统频率漂移在线测量流程如图5 所示。

图5 全视场频率漂移在线测量流程Fig.5 Online measurement pipeline of full FOV wavelength drift
控制望远镜小范围内无规则指向日面中心宁静区,观测系统视场为102″,指向范围小于600″即可实现光球结构的平滑,且不引入太阳自转带来的频率漂移。每帧采集不同空间位置图像,曝光时间30 ms,每个扫描波长点采集帧数为10,重复扫描次数为15。根据仿真结果,设定扫描范围为滤光器线心及±5 pm 偏带,步长1 pm,共11 个点。使用快速调谐滤光器,波长切换时间为0.1 s,每个波长状态采集10 帧,每帧曝光时间为30 ms,则每个波长耗时0.4 s。由于必要的延时及数据存储等因素,实测每个波长数据采集时间为1 s,实际每组扫描测量耗时11 s。获得的单色通道数据S 格式为11×10×15×2 048×2 048;宽带通道与单色通道逐帧同步,则获得的宽带通道数据C格式为11×10×15×2 048×2 048。假定观测时视场内无云,光强起伏在视场内是均匀的,宽带通道可用逐帧强度均值表示逐帧强度,故宽带校正数据C′格式为11×10×15。利用宽带校正数据C′对单色通道数据S进行逐帧校正,校正后的单色通道数据S′格式为11×10×15×2 048×2 048。
2.3 目标空间结构平滑
用于进行全视场频率漂移测量的每个波长数据由150 帧原始图像平均得到。每帧图像均为日面中心宁静区太阳光球图像,多帧平均后类似望远镜平场结果,太阳光球的米粒结构会被平滑。单帧图像与多帧平均图像相同视场位置的归一化强度如图6 所示,标准差由0.021 降为0.005。

图6 多帧平均减小空间结构引入的光强误差Fig.6 Reduction of error by multi frame average
3 实验结果
利用平滑后的多波长图像,在全视场范围内得到光谱轮廓,对每个视场的光谱轮廓进行高斯拟合,得到系统在全视场范围内的频率漂移情况。下文对在线频率漂移测量结果进行展示,并对测量精度进行分析。
3.1 频率漂移测量结果
经过数据预处理,得到11 帧图像,分别为11 个波长点的平滑目标空间结构后的图像。探测器每个点得到一组谱线轮廓,对谱线轮廓进行高斯函数拟合,得到对应视场的频率漂移。图7 为谱线轮廓高斯函数拟合流程以及测量结果,图7(a)为平滑后的11 个波长点图像,图7(b)为不同视场处随机选取的16 个谱线轮廓及高斯函数拟合情况,图7(c)为频率漂移测量结果。高斯函数拟合谱线轮廓后拟合残差RMS 为0.05。

图7 谱线轮廓高斯函数拟合流程以及测量结果Fig.7 Pipeline and result of spectral profile fitting
频率漂移测量结果接近二次曲面,但是存在明显的条纹,经过分析,频率漂移测量结果的条纹与图7(a)的条纹非常相似。图7(a)中的条纹为探测器封窗的干涉条纹,这表明频率漂移测量会受到探测器封窗干涉条纹的影响。为了进一步分析系统频率漂移的测量结果,利用图像滤波的去除条纹。图8(a)为去除条纹后的频率漂移测量结果及等高线,图8(b)为分离出的条纹。由图8(a)可知,实验系统全视场频率漂移呈同心圆状分布,圆心一定程度上偏离视场中心。

图8 分离干涉条纹Fig.8 Separation of wavelength drift and ripple
滤光器引入的频率漂移由入射角引起[20],关系如式(5)。
式中,λ0为滤光器中心波长,δλ为非正入射时滤光器频率漂移量,ne,no为双折射晶体非寻常光及寻常光折射率,i为Lyot 单元入射角。将去除条纹的频率漂移测量结果进行二次曲面拟合后,残差如图9 所示,拟合残差PV 值为0.35 pm。

图9 球面拟合残差Fig.9 Residual of spherical fitting
在不同时间对系统频率漂移进行测量,图10(a)、10(b)为使用2022年9月27日13:21 及17:47 的数据获得的全视场频率漂移结果。由频率漂移结果可知,全视场频率漂移的分布发生微小变化,意味着观测系统视场中入射角发生改变,原因是望远镜运动引起的光轴变化。图10(c)为两次测量的漂移量校正完光轴偏移后的差异,差值的频率漂移均值为0.8 pm,根据多普勒效应,在532.4 nm 处0.8 pm 波长漂移对应视向速度为450 m/s,计算方法如式6。
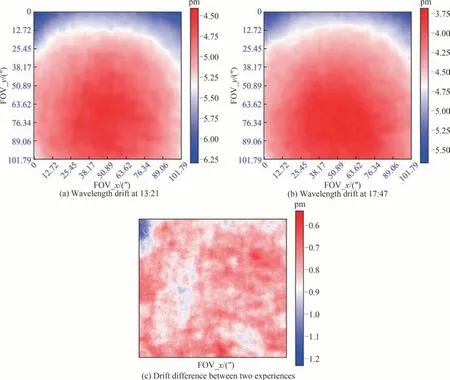
图10 频率漂移多次测量结果Fig.10 Results of repeated measurement
实验地点经纬度为24°34′48″N,102°57′01″E,当天日中时间为13:00。日中时地球自转不引入系统频率偏移,两次实验时距离日中时间分别为21 min 及287 min,对应地球转动角度为5.3°及71.8°。地球自转引入的视向速度可由公式计算,即
式中,v0为赤道处地球自转速度,通常为466 m/s,φ、θ分别为观测时的纬度及与太阳直射处的经度差。使用以上计算公式,可知两次实验时因地球自转引入的视向速度差异为365 m/s。实验测得的视向速度差异与理论计算结果差异在测试方法误差范围内。
3.2 实测结果误差分析
曲面拟合结果一定程度上反映了系统频率漂移测量的精度。但是为了更精确的分析测量误差,需进行重复测量。由于望远镜时刻在运动,实验系统光轴也随时间变化,为减小系统光轴变化及其他环境因素对测量方法精度的估计,两次测量时间间隔需尽可能减小。将一次测量数据分为两组,可视为连续两次测量,分别测量系统频率漂移,对两次测量的差异进行比较。所采用的分组方法为每一个波长点150 帧图像,前75 帧为第一组,后75 帧为第二组,使用两组数据分别获得全视场频率漂移结果。两次测量的频率漂移均值分别为−6.674 pm 和−6.675 pm。连续两次测量的结果排除了系统光轴运动及环境因素引入的误差,两次测量的差异为测量方法存在的误差。全视场频率漂移结果差异的标准差为0.13 pm,差异结果见图11。全视场统计结果表明,由测量方法引入的测量误差优于0.13 pm。
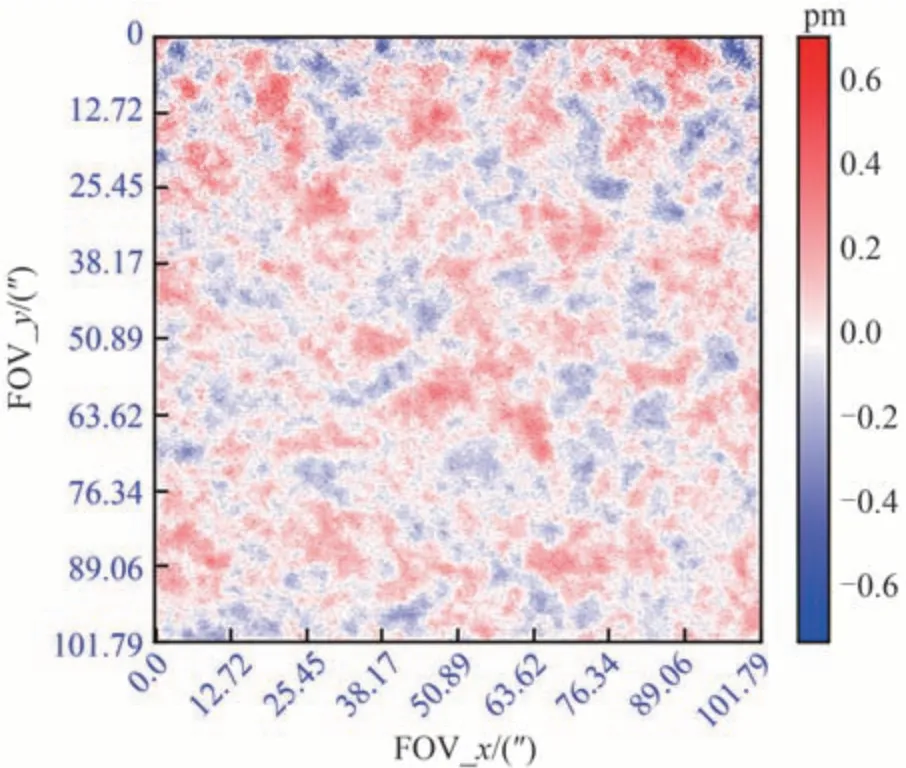
图11 两次测量差异Fig.11 Difference in repeated measurement
4 结论
本文提出了全视场系统频率漂移的在线测量方法,利用太阳大气谱线轮廓扫描,实现了观测视场范围内频率漂移的精细测量。控制望远镜指向日面中心随机位置并进行连续同步采集,利用多帧图像平均方法降低了拟合误差。利用同步采集的宽带图像对滤光器光谱扫描图像进行强度校正,减小了光强起伏对光谱轮廓拟合的影响。与传统方法相比,该方法降低了系统入射光强起伏及观测目标空间结构的干扰,提高了视场效应测量的精度。基于该方法,在NVST 仪器平台搭建实验光路并进行频率漂移实测,结果表明全视场的频率漂移测量误差小于0.13 pm。系统频率漂移的静态误差接近二次曲面,与理论模型一致;在102″视场范围内,系统频率漂移静态误差幅度为1.6 pm;多次测量频率漂移均值随地球自转变化,且与望远镜指向范围相关,需尽可能保证观测区域处于日面中心,减小太阳自转引入的误差。利用该方法对太阳光球观测系统频率漂移进行在线高精度测量,可用于校正太阳大气速度场及磁场测量过程中的光谱数据,提高其测量精度。
经过窄带滤光器的单色光会在探测器封窗发生干涉,形成规则的干涉条纹。不同波长的图像中条纹位置不同,使得光谱轮廓拟合得到的频率漂移结果中也存在条纹。目前选用图像滤波的方式去除全视场频率漂移结果中的条纹,无法保证条纹剔除效果。以后的观测系统设计时需考虑如何从源头消除图像的干涉条纹,比如选用带有一定楔角的探测器封窗等。
全视场频率漂移在线测量方法数据获取方式与太阳光球观测过程中的平场模式相似,频率漂移在线测量使用的数据仅做了暗场及强度校正,未做平场改正。因此多帧平均后的图像中存在脏点,会影响全视场频率漂移的测量。为了提高全视场频率漂移测量精度,还需考虑如何消除观测系统中脏点的影响。
猜你喜欢
小学科学(2023年7期)2023-03-31
现代电子技术(2022年18期)2022-09-17
中国光学(2021年6期)2021-11-25
测试技术学报(2021年3期)2021-06-11
压电与声光(2019年5期)2019-10-22
压电与声光(2019年4期)2019-08-29
传感器世界(2019年8期)2019-02-17
中国医疗设备(2019年1期)2019-01-15
电子测试(2018年11期)2018-06-26
光学精密工程(2016年1期)2016-11-07
