
容量约束的间歇式公交专用道控制策略
2023-06-20 02:53林盈盈董红召佘翊妮
浙江工业大学学报 2023年3期
林盈盈,董红召,张 楠,佘翊妮
(1.浙江工业大学 机械工程学院,浙江 杭州 310014;2.浙江开放大学 工程教研部,浙江 杭州 310012)
公交专用道[1](Dedicated bus lane,DBL)虽然能保障公交车通行不受干扰,但是在交通拥堵时公交专用道上较低的车流量会造成道路资源浪费。Viegas[2]提出间歇式公交专用道(Intermittent bus lane,IBL)策略,当公交车不在路段上时将空闲的公交专用道空间分享给社会车辆使用,这种情况下的社会车辆可称为借道车。公交专用道上可用于社会车辆使用的是相邻两辆公交车之间的空间,即可借道空间。公交专用道控制策略的目标是控制进入可借道空间的借道车总量,既可保证借道车行驶不造成后方公交车额外延误,又能使借道车充分利用公交专用道空闲空间。然而IBL策略不要求已经借道的车辆在公交车到来时离开公交专用道,这就导致其中部分车辆因等待红灯等原因阻碍公交车行驶。为此许多学者的研究改进了IBL策略,如利用公交车的交通信号优先,将IBL策略与单个路口或者多个路口的信号灯配时协调[2-4];利用公交车的道路空间优先使公交车略过路口停车队列,减少公交车的延误[5-6],然而在交通拥堵时,这些措施的调整范围都是有限的。有的学者尝试在公交车进入路段后驱离过量借道车离开公交专用道。Eichler[7]在间歇优先公交车道(Bus lanes with intermittent priority,BLIP)策略的研究中提出了清空长度的概念,即在路段的物理长度内驱离公交车前方的借道车辆。董红召等[8-9]提出公交专用道时分复用(Bus lane with time division multiplexing,BLTDM)策略、Wu等[10]将网联车技术引入BLIP策略,分别给出了不同的确定清空长度的方法,通过精细控制清空长度减少被驱离的借道车数量。然而在交通流量较大,如接近甚至超过饱和状态时,清空长度范围内被驱离的借道车会造成公交车延误和邻道交通堵塞。虽然增加清空长度可以换取更长的换道时间以减少对邻道交通的干扰,但是会降低专用道的空间利用率。吴鼎新[11]的仿真结果显示即使车联网环境也无法解决这一问题。还有研究对借道车数量进行控制,策略IBL[2]、BLIP[7]和BLTDM[8-9]均在道路上设置公交车检索点,当公交车到达检索点时根据相应策略禁止社会车辆借道。其中BLTDM策略还进一步将路段在空间上分为较小片段,仅在空间片段入口允许车辆进入专用道,分散控制借道车数量。这些控制的时间起点是目标公交车到达检索点时刻,控制的对象是公交车前方的车道空间。然而控制时间起点之前可能已经有过量的借道车进入目标公交车前方的车道空间,并且这些借道车不能保证在目标公交车到达前及时离开专用道,这就导致控制策略可能失效;而检索点与路段间的间隔不能适应变化的公交车发车间隔,会使专用道空间不能充分利用。
上述控制策略都没有考虑相邻公交车间能够接受的不妨碍后方公交车行驶的借道车总量,即相邻公交车间专用道的可借道容量,有的使借道车过多造成公交车延误,有的使借道车太少造成车道资源浪费。近年来,车辆通信系统的快速发展使道路上的车辆能与其他车辆和基础设施交换信息,实现更多交通控制[12-13]。因此,笔者提出一种车联网环境下基于可借道容量的间歇式公交专用道控制策略,首先通过预测前后两辆公交车在路段上行驶期间交叉口的通行能力,将其作为专用道在路段上两辆公交车间的可借道容量;然后根据预测的公交车到达时间,以及路段实时交通流量、交叉口信号相位和公交车停站等路段运行参数;最后通过车联网技术控制可借道容量范围内的社会车辆借道,从而在确保公交车行驶不受阻碍的前提下充分利用专用道的通行能力。此外,给出了一种非车联网环境下的替代策略以实现同样的目标。
1 容量约束专用道控制过程
间歇式公交专用道控制策略实施的典型路段如图1所示。图1包含一条公交车道和普通车道,其中普通车道仅画出专用道的邻道,且处于近饱和状态。前后相邻的两辆公交车之间的专用道是可供社会车辆借用的空间资源,利用交叉口对这样的空间进行划分构成了容量约束下间歇式公交专用道的基本控制单元。由于公交车向前行驶而交叉口位置不变,因此基本控制单元的空间范围是在路段上逐渐变化的。
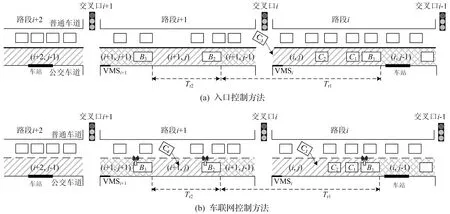
图1 间歇式公交专用道控制策略实施的典型路段
以图1(b)中路段i所包含的基本控制单元(i,j)为例,i表示基本单元所在路段序号,j表示基本单元出现的先后顺序,进入公交专用道的车流演化过程为
1)从前车B1进入路段i开始,基本控制单元(i,j)的空间范围是前车B1和交叉口i之间的专用道空间,且随着B1的前进逐渐增加。
2)若上游相邻公交车即后车B2离得较近,在B1到达下游交叉口i-1之前,B2已经到达路段i,则此时基本控制单元的空间达到最大,此后的空间范围由B1和B2限定,直到B1到达下游交叉口i-1。
3)随后的空间范围由交叉口i-1和B2限定,且逐渐减小,直至B2到达交叉口i-1后,基本控制单元(i,j)的生存期结束。
4)若上游相邻车辆B2离得较远,在B1到达交叉口i-1时,B2仍未到达路段,则演化过程步骤2)中的空间范围由交叉口i-1和交叉口i限定,直至B2到达交叉口i,再进入演化过程步骤3)。
演化过程中的前车、后车是相对的概念,对B1和B2组成的相邻公交车组而言,B1是前车,B2是后车;而对于B2和B3组成的相邻公交车组而言,B2是前车,B3是后车。为了便于分析,在每一组相邻公交车组中将前车用Bf表示,后车用Br表示。从时间跨度看,基本单元的控制过程是从前车Bf进入路段开始直到后车Br离开下游交叉口为止。以这样的划分规则,可通过分别控制每个基本单元来实现整条公交专用道的控制。由于公交专用道控制策略仅在交通接近或超过饱和状态时实施才有意义,为了不对近饱和状态的邻道交通产生干扰甚至阻塞,规定借道车只能通过下游交叉口离开专用道,不允许其在进入专用道后再通过换道行为离开。
在每个基本控制单元存在期间,划定单元空间范围的前后两辆公交车以及进入该空间的借道车运行过程。当前车Bf进入路段后,借道的社会车辆即可进入基本控制单元,跟随Bf行驶。在借道初期,因为前车Bf的行驶速度vb小于社会车辆的行驶速度vc,所以前车Bf会在专用道上形成一个移动瓶颈,这个阶段借道车无法离开路段。当前车Bf离开下游交叉口后,后方的借道车就不受前车影响,通过交叉口驶离路段,并且在后车Br到达交叉口前,所有的借道车都已离开路段,从而确保不阻碍后车Br的行驶。对基本控制单元而言,由控制过程中交叉口的通行能力限定的且不会阻碍后方公交车行驶的借道车总量就是基本控制单元的可借道容量。
在车联网环境下,可以控制进入专用道的借道车总量不超过可借道容量(图1b)。前车Bf到达路段入口后根据预测得到的可借道容量确定控制单元是否允许借道,并将控制单元状态通过通信网络向途径的社会车辆广播。邻道上的社会车辆在确定当前控制单元内可借道容量有剩余时进入专用道借道,直到可借道容量饱和,或者后车Br到达下游交叉口使该单元的控制过程结束。
由于车联网控制方法需要大部分的公交车和社会车辆都要装备联网设备,这在目前还没有全面部署车联网的情况下难以实施。因此笔者提出了一种适合当前交通设施的控制方法,即通过入口控制来约束进入的借道车总量(图1a)。由可借道容量和公交专用道入口流量得到允许交通流进入公交专用道的时长。在公交专用道入口处设置可变信息标志(Variable message sign,VMS),显示“允许借道”和“禁止借道”两种状态对应入口的开启和关闭,同时禁止借道车在路段中间换道进入公交专用道,由此将对借道车总量控制转化为公交专用道入口的开启时长控制,最终实现容量约束的公交专用道控制目标。
2 可借道容量计算
可借道容量对应于道路上实时运行的前后相邻公交车辆划分的基本控制单元,所以其值的确定与前后公交车到达路段下游交叉口时的车头时距密切相关,以下研究假设已知公交运行的实时行驶轨迹,包括路段行程时间、停站时间以及车辆位置等,此类信息的获取可基于相关的预测研究[14-17]。
容量约束的公交专用道控制策略是对到达路段公交车即前车Bf后方的专用道空间进行借用控制,因此对当前控制单元的控制过程可以由前车Bf到达路段入口的条件触发,称为前车触发方式。在路段入口处实时检测是否有公交车到达路段,当有公交车到达时,将其作为控制单元中的前车Bf并开始该单元的控制过程。
前后公交车Bf,Br与借道车在路段专用道上的演化过程时空图如图2所示。以路段交通流量饱和状态为例进行说明,即每个完整的信号周期中,红灯相位累积的车辆队列无法在绿灯相位完全释放。基本控制单元空间范围在前方受前车Bf限制时,没有借道车可以离开路段。只有在前车Bf离开交叉口后,后方借道车才能在绿灯相位期间驶离。基本控制单元交叉口通行能力对可借道容量形成总量约束。
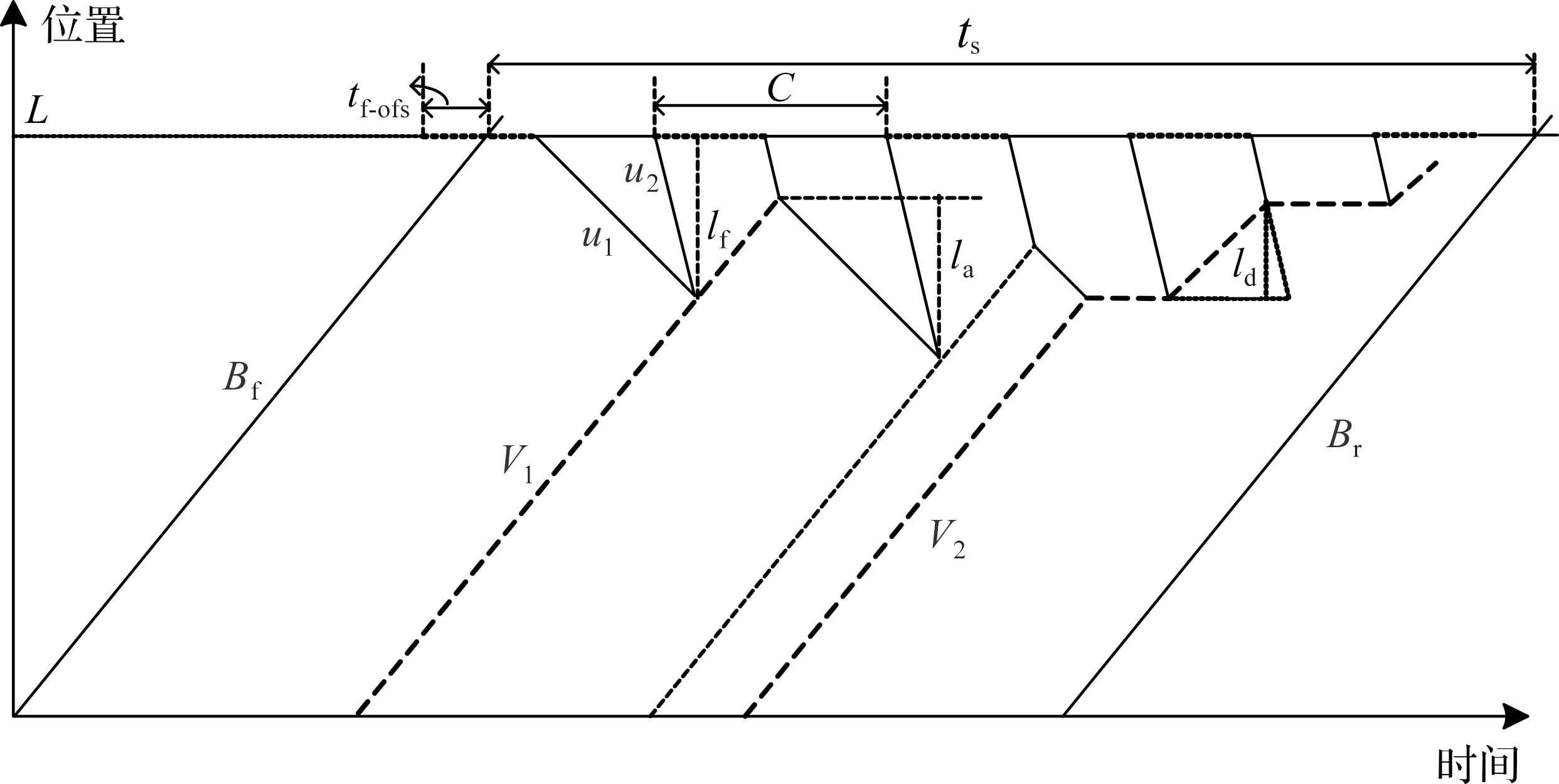
图2 基本控制单元借道过程时空图
通过公交车轨迹预测技术和公交信息系统获得的公交车停站等信息,不仅可以预测出后车Br在时长Tr后到达路段入口,这里Tr已经考虑了后车Br在上游路段的停站时间和交叉口延误时间,而且可以预测前车Bf和后车Br在当前路段上的行程时间,从而得到两车到达下游交叉口的信号偏移量tf-ofs和tr-ofs,并进一步得到前车到达当前路段时估计的下游交叉口两车车头时距ts,以及其中的绿灯时长g。当信号灯绿灯期间单车道通行能力为qm时,基本控制单元可释放的最大借道车辆数是可借道容量的总量约束,即
N=qm×g
(1)
此外,基本控制单元的可借道容量还受到信号灯和前车停站引起的社会车辆排队队列长度影响。设以绿灯相位为起点的信号周期为C,绿信比为λ,前车Bf到达交叉口时遇到的第一个信号周期为不完整周期(C-tf-ofs)。如果遇到红灯,借道车仍无法离开,交叉口会形成排队队列;当遇到绿灯相位,若排队车辆无法在剩余绿灯相位内消散完毕,借道车还将继续在紧接着的红灯相位排队,有可能影响后车Br行驶。在此之后借道车在交叉口将以完整的信号周期为单位进行队列累积或消散。为此假设前车Bf进入路段后即刻允许车辆借道,并允许可借道容量Q范围内的社会车辆进入公交专用道,以不完整信号周期形成的最长排队队列最后一辆借道车V1进入专用道的轨迹为分界,将这一时刻之前进入的借道车总量设为Q1,这之后进入的借道车总量设为Q2,有Q=Q1+Q2,图2中V2表示可借道容量允许的最后一辆借道车行驶轨迹。则只要保证两个阶段借道过程中累积队列长度均不阻碍后车Br行驶,即可获得满足排队队列长度对可借道容量的约束。否则必须减少借道车数量以保证后车的行驶路权。
Q≤N=ld-maxkjam=(n·ld+lr)kjam
(2)
(3)
假设刚好不受后车Br轨迹影响时第一个不完整信号周期内能累积的最大排队队列长度为lf,有Q1=lfkjam。且规定一旦借道车总量在交叉口形成的累积队列长度会阻碍后车Br行驶,即刻关闭当前基本控制单元,并在其生存期内不再开启。因此可得到前述分析中第二个阶段可借道容量Q2需满足如下关系式中的一种,即
(4)
或者
(5)
其中式(4)表示第一阶段借道车形成的排队队列长度不会阻碍后车Br行驶,可根据基本控制单元的车辆释放能力确定第二阶段可借道容量Q2;式(5)表示第一阶段借道车形成的排队队列阻碍了后车Br行驶,只能以后车轨迹约束的队列长度lf作为借道车总量约束,因此第二阶段可借道容量Q2为0。根据累积队列长度lf获得第一阶段的可借道容量为
(6)
最终求得基本控制单元总的可借道容量为
Q=Q1+Q2
(7)

(8)
3 容量约束的专用道控制策略
容量约束的公交专用道控制策略实施时根据已有的公交车行程时间预测方法得到相邻公交车间的车头时距,然后通过上述步骤求得各基本控制单元的可借道容量Q,并在其约束下对借道车总量进行控制。在车联网环境下采用车联网控制方法(Connected vehicle capacity control in intermittent bus lane,CVCC-IBL),当没有车联网环境时采用替代的入口控制方法(Entrance capacity control in intermittent bus lane,ECC-IBL)。
3.1 车联网控制方法
为了在策略实施过程中控制借道车总量,需要在控制系统中保存每个基本控制单元的剩余可借道容量,即容量约束条件。以图1(b)中路段i+1上的3个基本控制单元为例,建立如表1所示的路段控制单元信息表,包括控制单元的空间范围和剩余的可借道容量Qleft,其中空间范围用路段上离路段入口的距离l表示。每当有新的公交车到达路段入口时,在表1中新增1个控制单元信息,此时相邻的后车还未达到,后车位置用路段的入口位置l=0代替,剩余容量Qleft为预测的可借道容量Q,由第2节方法求得,如表1中单元j+1。当有公交车离开路段后,其作为后车的控制单元空间变为0,该单元的控制过程自然结束,从表1中删除单元信息;而其作为前车的控制单元信息继续保留,前车位置由路段出口位置l=L代替,L为路段长度,如表1中单元j-1。当有借道车进入路段,对其所在控制单元的剩余容量进行更新。
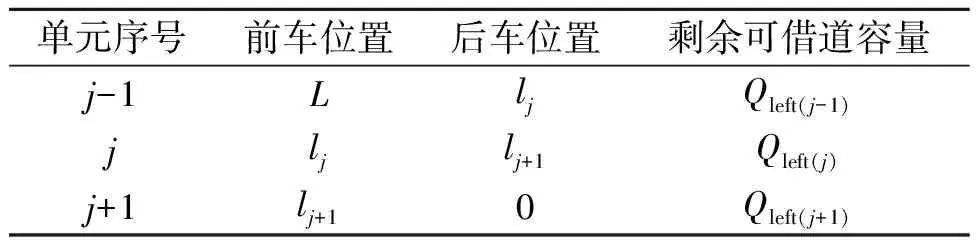
表1 路段i+1控制单元信息表(以图1b中的单元布局为例)
当新的公交车到达路段入口时,就要确定前后公交车在下游交叉口的车头时距ts和有效绿灯时间g,再根据前一小节中模型计算可借道容量Q。首先确定车头时距ts。设前车Bf到达路段的时刻为借道过程开始时刻t0,根据后车Br在上游各个路段的预测行程时间估计两车此时的车头时距Tr,并预测两车在当前路段的行程时间。文中为了示意,用公交车匀速行驶时间作为当前路段的预测行程时间进行控制,即L/vb。之后结合下游交叉口实时相位得到Bf到达下游交叉口的信号偏移量tofs,则相邻公交车到达下游交叉口的时刻tf和tr分别为
(9)
式中:αf,αr分别为前、后公交车的停站选择参数;tpf,tpr分别为预测得到的前、后公交车在当前路段公交站的停车时长。由于后车Br不能超越前车Bf,则前车到达当前路段时估计的下游交叉口两车车头时距为
ts=max(tr-tf,0)=max(αrtpr-αftpf+Tr,0)
(10)
接着计算车头时距ts内交叉口能用于释放借道车的有效绿灯时间g。这与前车Bf和后车Br到达下游交叉口的信号偏移量tf-ofs和tr-ofs有关,分别为
tf-ofs=(tofs+tf-t0)modC
tr-ofs=(tofs+tr-t0)modC
式中:tofs为前车Bf到达路段入口时下游交叉口的信号偏移量;C为信号周期。对前车Bf而言,到达时刻所在信号周期中偏移量以后的绿灯时间max(λC-tf-ofs,0)属于有效绿灯时间;对后车Br而言,到达时刻所在信号周期中偏移量以内的绿灯时间min(tf-ofs,λC)属于有效绿灯时间。当前后两车在不同信号周期到达,即tr-tf+tf-ofs>C时(图3a)车头时距ts内的有效绿灯时间为
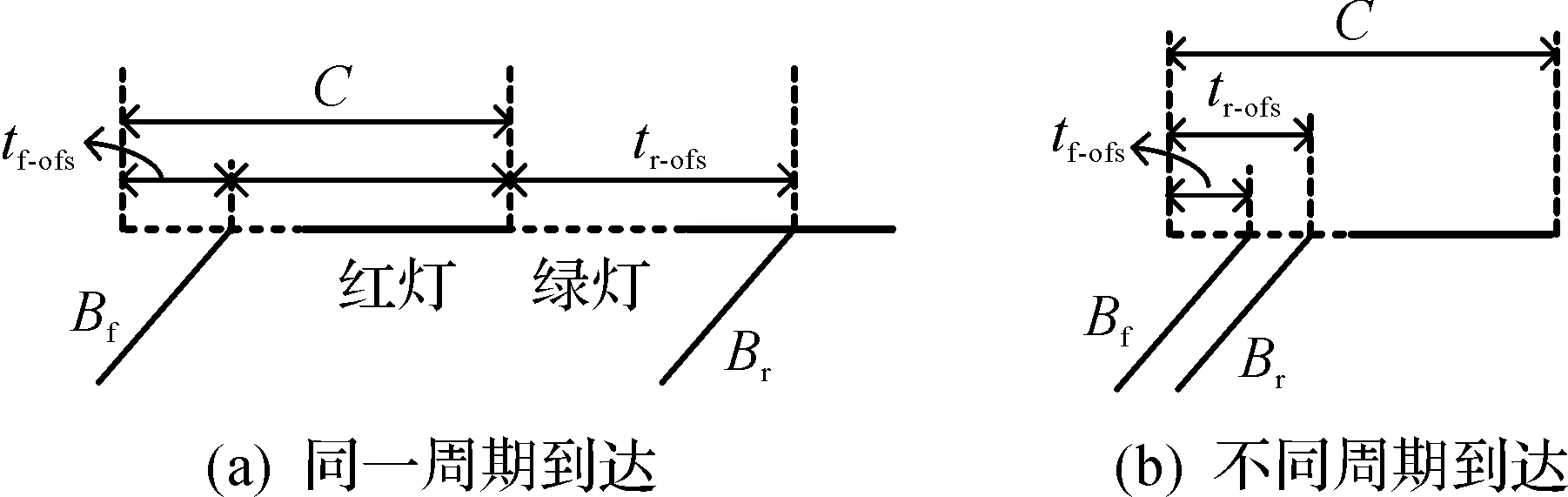
图3 前后两车到达交叉口时信号周期的关系

min(tr-ofs,λC)
当前后两车在同一信号周期到达,即tr-tf+tf-ofs≤C时(图3b),有效绿灯时间为
g=max(λC-tf-ofs,0)-max(λC-tr-ofs,0)
上述两种有效绿灯时间的表达式可合并为
(11)
在控制中还需要考虑的问题是借道时间条件。当后车Br在交叉口碰到红灯时,要保证此红灯相位开始前所有借道车均能离开公交专用道,此时的红灯相位开始时刻tshut=tr-(tr-ofs-λC)。则借道时间条件为

(12)
式中:l为期望借道的社会车辆离路段入口的距离;t为当前系统时刻。若考虑车联网中的信息传输延时,还应在时间条件上扣除可能最大的时间延误,即减小tshut,用更严格的时间条件保证借道车能按时离开路段。
当有借道车申请借道,则判断借道车是否满足容量条件和时间条件,满足的话允许借道。在每个时间系统更新信息表中的公交车位置,并与各单元可借道剩余容量Qleft一起向途径社会车辆广播。Qleft=0时单元被关闭。
由于预测的公交车行程时间与实际行程时间存在一定误差,因此在控制策略中对此类误差作出反馈,以提高策略的适应能力。车联网控制方法中,只要满足容量条件和时间条件,借道车在基本控制单元生存期结束前都能继续借道,因此在控制策略实施过程中可充分利用后车行驶的实际数据对可借道容量进行修正。理论上看对误差的修正可以在整个单元生存期间进行。但考虑到行程时间预测在很短的时间内变化不明显,仅在后车到达路段时进行一次反馈。修正过程为
步骤1预测前车Bf到达路段时其在当前路段的行程时间:获得停站选择αf,若αf=1则表示在车站停靠,预测停靠时间tpf和行程时间,计算前车Bf到达下游交叉口的信号偏移量tf-ofs,再估计等待红灯时间。
步骤2估算可借道容量:当前车Bf到达路段时获取后车Br在上游的位置信息,根据与前车Bf同样的预测技术估计其经过上游各路段后到达下游交叉口的时刻,并估计前后车在下游交叉口的车头时距ts,利用第2节方法计算可借道容量Q。
步骤3修正可借道容量:当后车Br到达当前路段时,可以获得后车Br在上游路段的实际行程时间,并利用当前行驶数据对Br在当前路段上的行程时间再进行一次预测后利用第2节方法求得修正后的可借道容量Q′,并根据修正值Q′与第一次估计值Q的差值对剩余容量进行更新。当Q′>Q时,在剩余容量上追加可借道容量。当Q′≤Q时,能否修正与剩余容量Qleft有关,当Qleft>(Q-Q′)时,剩余容量修正为Qleft-(Q-Q′),这往往发生在相邻两者车头时距较大的情况。当Qleft≤(Q-Q′)时,由于控制策略中约定已经进入公交专用道的借道车不能通过换道离开车道,只能放弃对可借道容量的修正,或者通过增加修正次数以进一步减少误差。上述剩余容量Q′left的修正规则可合并为
(13)
将剩余容量的修正结果更新到路段控制单元信息表中。根据行程时间预测时更短距离和更近时间的预测结果更优的特点可知修正值Q′优于第一次估计值Q,从而提高了控制系统对可借道容量预测结果精度的适应能力。
上述车联网控制方法流程如图4所示。
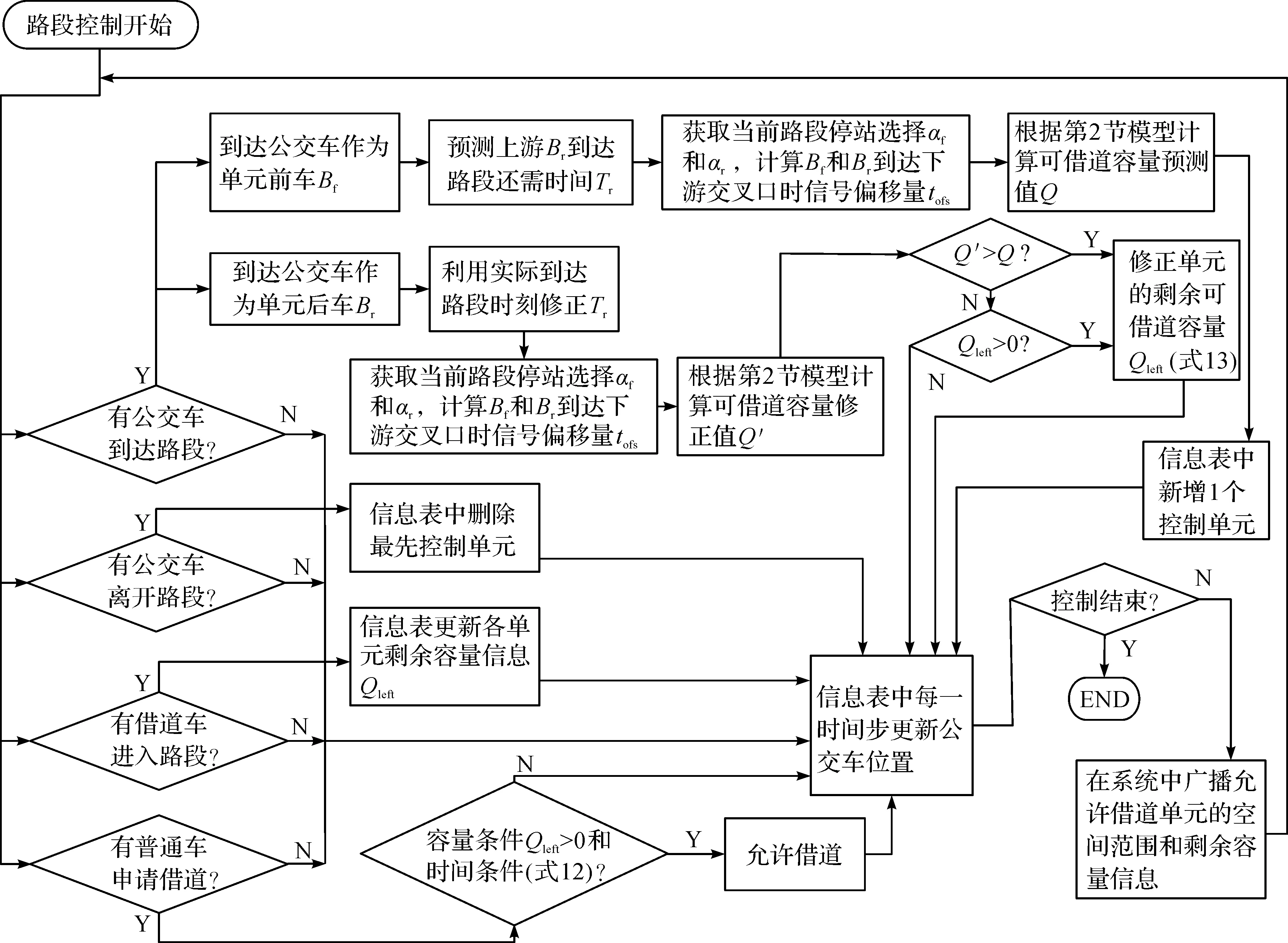
图4 车联网控制方法系统流程图
3.2 入口控制方法
(14)
由于该方法中基本控制单元的控制过程在后车Br到达路段入口时结束,因此无法对预测的公交车行程时间进行修正,但可以根据预测容量约束下借道车对公交车的行程时间影响程度设置一定的保护阈值,即通过减少预测的可借道容量来保障公交车的优先路权。
入口控制的流程:检测到有新的公交车(即前车Bf)到达路段,根据可借道容量计算模型求得Q,之后根据式(14)求得入口开启时长ton,赋给计时变量time。当time>0时,保持入口开启状态;当time=0时,即可关闭入口。然而无论入口状态为开启或者关闭,系统都需要继续检测是否有新的公交车(即后车Br)到达路段入口,一旦新车到达则即可切换到以新车作为前车的下一个基本单元的控制过程。控制流程如图5所示。
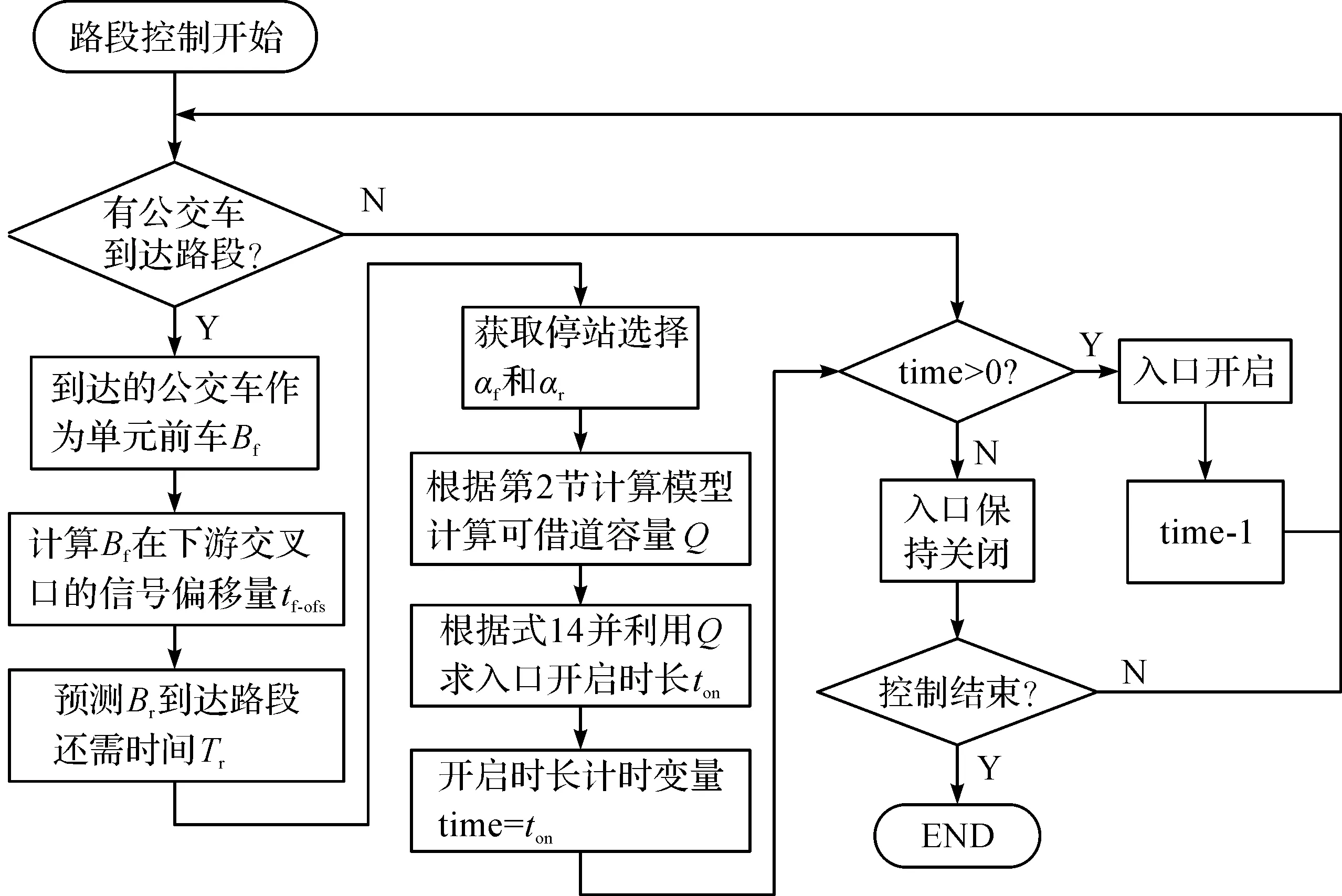
图5 入口控制方法系统流程图
4 仿真分析
4.1 仿真设置
为了评估提出的两种容量约束间歇式公交专用道控制策略(车联网控制方法CVCC-IBL和入口控制方法ECC-IBL)的效果,使用SUMO[18]仿真软件建立交通场景,采用TRACI编程开发了控制程序,对上述策略的车道行驶权限以及相应专用道空间的开启、关闭状态实现控制,对交通饱和度、公交车发车间隔、公交车站等不同因素影响下的场景进行仿真。将得到的路段交通性能(包括公交车和社会车辆行程时间以及交通流量)与不共享车道的公交专用道(DBL)策略和传统间歇式公交专用道(IBL)策略进行对比。
建立三车道路段模型,右侧是公交车道,另外两条为普通车道。不考虑信号灯影响时路段单车道的饱和流量为qm,普通车道的单车道到达流量为qc。将路段实际交通流量与普通三车道通行能力的比值作为交通流饱和度S。在下游交叉口设置两相位信号灯,体现城市交通中的间歇式交通流现象,路段上游不设置信号灯。设置两组公交车发车间隔,即busPeriod=150,300 s。其余有关参数如表2所示。
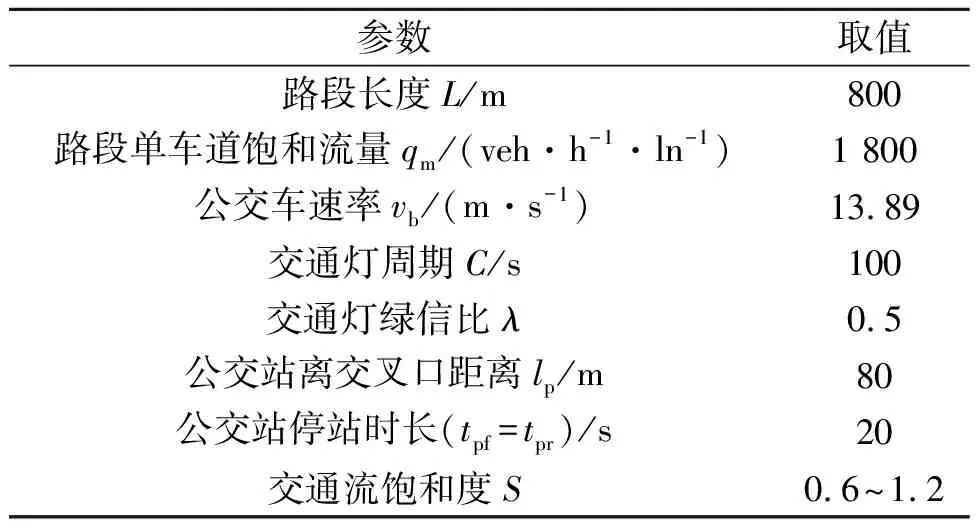
表2 仿真实验参数
4.2 仿真分析
4.2.1 控制策略的交通性能分析
在不同的公交专用道策略控制下路段上公交车的行程时间如图6所示。路段在容量约束的控制策略CVCC-IBL、ECC-IBL和IBL控制下,公交车的行驶与DBL相比都产生了额外的延误。在低交通饱和度时,几种控制策略引起的公交车额外延误均不明显,这是合理的,此时社会车辆不需要借用专用道也能通畅行驶。在高交通饱和度时,IBL策略中公交车的额外延误增加明显,而CVCC-IBL和ECC-IBL策略通过在借道过程开始前对可借道容量进行估计,不允许过多的借道车进入专用道,从而使公交车的额外延误均低于IBL策略。当饱和度S=1.2,公交车发车间隔busPeriod=150 s时,IBL策略中公交车行程时间比DBL时增加了23.6%,而策略CVCC-IBL和ECC-IBL比DBL仅增加了2%和3%。公交车发车间隔busPeriod=300 s时,前方公交车对借道车的影响不会传递到后方公交车所在路段,因此IBL策略中公交车延误仅比DBL模式增加了7.7%。说明在饱和交通时,IBL仅在发车频率较低的情况下能保证公交车的延误不会大幅增加,即通过增加公交车间隔,也就是增加社会车辆释放时间,让过量借道车在后方公交车到来前离开交叉口。这与Zyryanov等[19]的结论一致。而容量约束的两种控制策略即使在高饱和度和公交车发车间隔较小的情况下性能也接近于DBL,比IBL具有更大的适用范围。这里基于可借道容量的两种控制策略中公交车产生的少量延误,原因可能是借道车在交叉口前等待红灯时形成的交通队列长度预测偏差造成的。而CVCC-IBL策略中还可能由于借道车在控制单元中分布不均,当较多的借道车集中在后车Br近前方时也容易使后车产生额外延误。
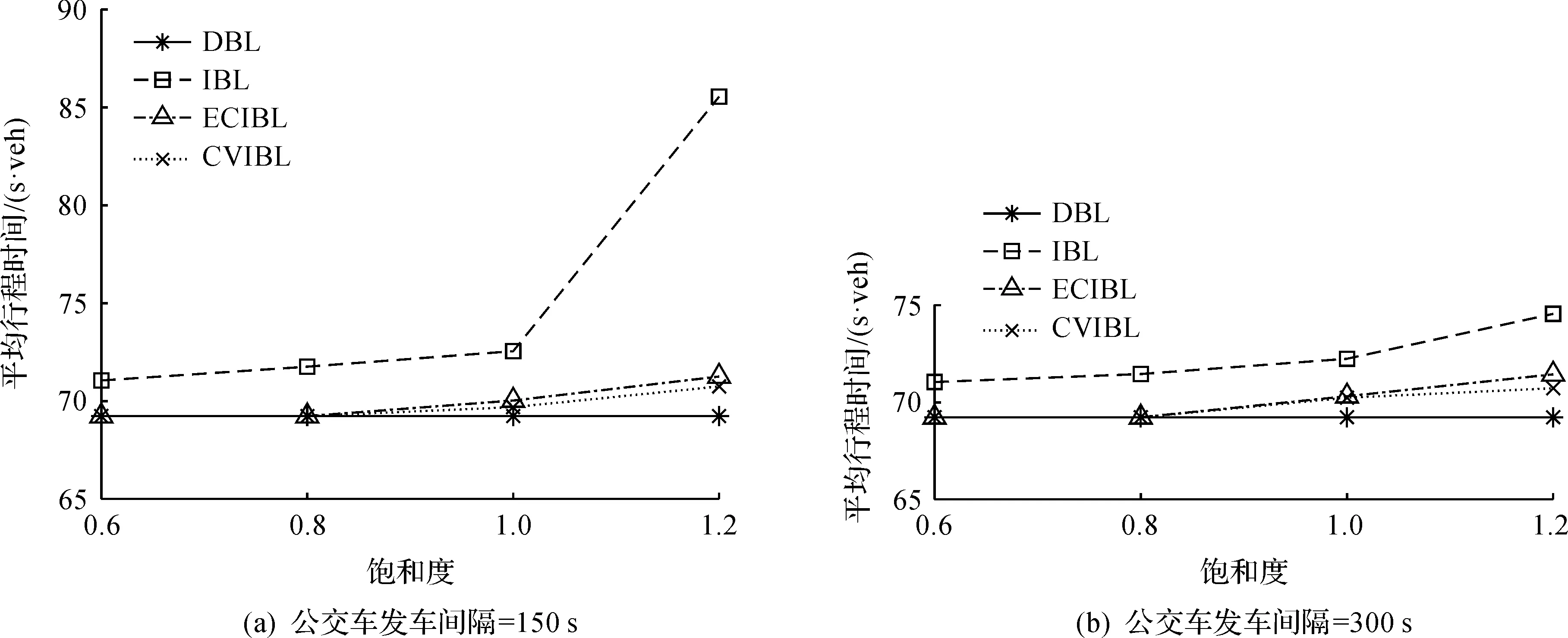
图6 不同饱和度时的公交车行程时间
在不同控制策略下路段上社会车辆的行程时间如图7所示。在较高的交通饱和度情况下(S≥1),因为策略CVCC-IBL、ECC-IBL以及普通IBL都在一定程度上利用了空闲的专用道空间,提高了道路交通流量,所以社会车辆的行程时间比减少了一条车道的DBL策略大幅减少。当交通进入高饱和状态后(S=1.2),由于道路交通拥堵,即使专用道空间得到利用,也无法满足交通需求,3种利用公交专用道的策略下社会车辆的行程时间均明显增加,说明此时道路上的车辆已接近饱和,而增加发车间隔能缓解社会车辆的行程时间增加程度。当公交车发车间隔busPeriod=150 s时,CVCC-IBL和ECC-IBL策略下社会车辆行程时间相近,虽然比IBL稍有增加,但是能保证公交车行驶不受阻碍;当busPeriod=300 s时,随着IBL策略的专用道空间中受公交车影响的占比减少,容许公交车有一定的延误,借用专用道行驶的车辆数增加,行程时间减少。策略CVCC-IBL和ECC-IBL则是优先保证公交车行驶,弊端是社会车辆行程时间比IBL增加了20.6%。
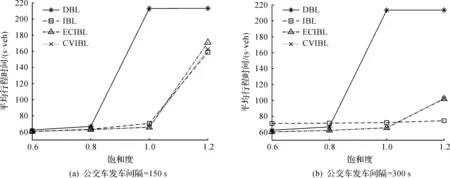
图7 不同饱和度时的社会车辆行程时间
4.2.2 公交车停站对控制策略性能的影响
公交车停站对公交车行程时间的影响如图8所示。当busPeriod=150 s时,IBL策略的行程时间比DBL增加了25.4%;当busPeriod=300 s时,则增加了78.9%。在高饱和交通中大量社会车辆不仅会形成交叉口交通队列,而且会因公交车停站形成交通队列,当两个因素叠加时更容易对后方公交车产生阻碍。特别是在公交车发车间隔较大时,路段上没有公交车的时间较多,借道车总量增加后形成的队列长度也增加,造成公交车行程时间大幅增加。而策略CVCC-IBL和ECC-IBL中因为考虑了公交车停站因素,借道车能利用公交车到达前的绿灯时间离开路段,所以公交车行程时间没有增加。
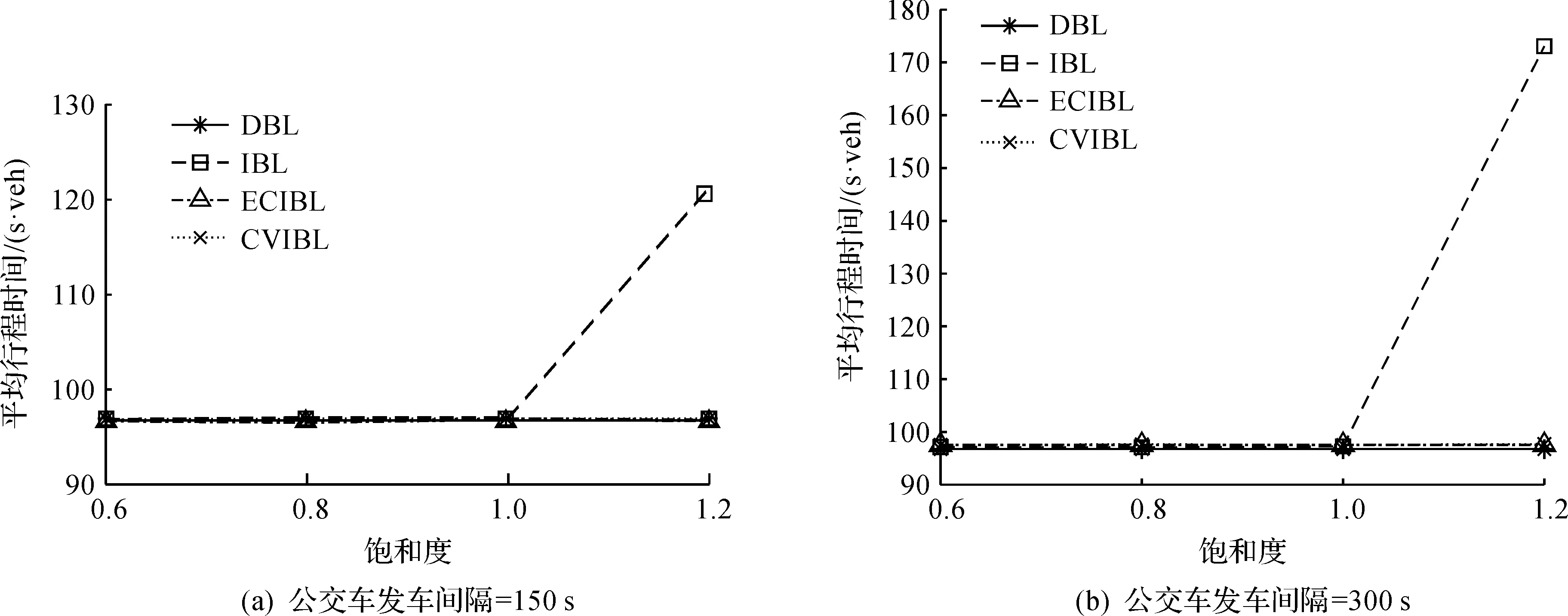
图8 公交车停站影响下,不同饱和度时的公交车行程时间
公交车停站对社会车辆行程时间的影响如图9所示。相较于图7所示的情况,当S=1.2时,即使较大的公交车发车间隔,也不能缓解社会车辆行程时间的增加,说明在高饱和交通情况下,公交车停站降低了控制策略对社会车辆行程时间的保障能力。
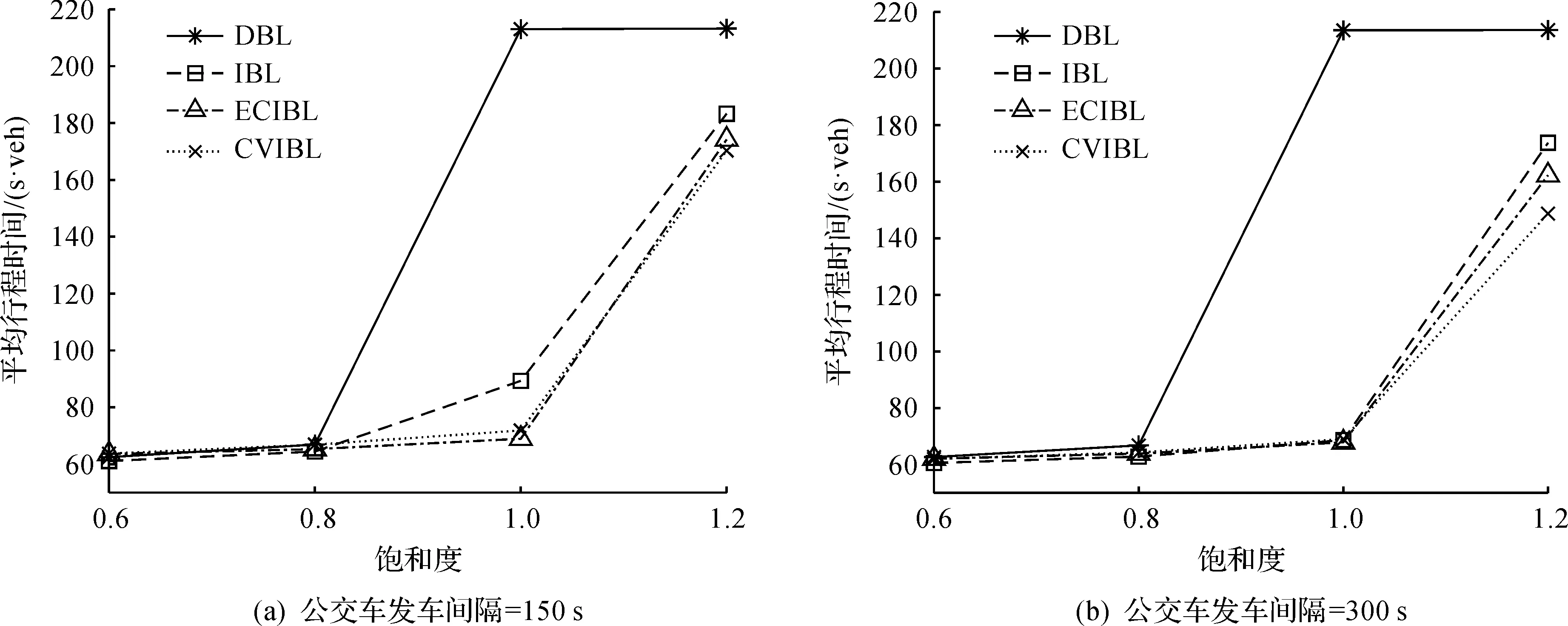
图9 公交车停站影响下,不同饱和度时的社会车辆行程时间
对比CVCC-IBL和ECC-IBL策略中公交车和社会车辆的行程时间,虽然两者的性能差异并不明显,但是基于车联网技术的CVCC-IBL策略使社会车辆可以在控制过程的时间范围内均有借道机会,借道车可以根据所处的交通条件来选择最佳的换道时机,不仅提高了借道过程的稳定性,而且能提高专用道空间的利用率,是理想的公交专用道控制方法。而入口控制的方法中,由于道路空间中留给借道入口的空间不会太大,社会车辆只能在进入车道的短暂时间内决定是否借道。因为社会车辆不能换道进入公交专用道,当后车Br到达路段使入口关闭后,即使基本控制单元内仍有可借道空间剩余也不能继续提供给社会车辆使用,所以适合在非车联网环境下作为替代方案。
5 结 论
笔者提出了一种车联网环境下基于可借道容量的间歇式公交专用道控制策略,在确保不阻碍公交车行驶的前提下充分利用公交专用道的空闲空间。首先,将前后相邻的两辆公交车在路段公交专用道上的空间作为基本控制单元的空间范围,将前一辆公交车到达路段到后一辆公交车离开路段的时间间隔作为控制单元的时间范围;然后,将该时间范围内路段下游交叉口的通行能力作为基本控制单元的可借道容量;最后,利用车间通信技术对借道进入该单元的社会车辆进行总量控制。此外,在车联网还未普及的情况下,笔者提出了一种可通过入口控制方法实现的控制策略替代方案。通过SUMO设置道路场景对两种控制策略进行建模仿真,在不同的交通饱和度、公交车发车间隔以及公交车停站情况下,提出的基于可借道容量的控制策略比传统的间歇式公交专用道策略具有更少的公交车和社会车辆行程时间,即使在高饱和度情况下仍能保持更优的性能。
猜你喜欢
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
建材发展导向(2019年11期)2019-08-24
中国自行车(2017年5期)2017-06-24
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
上海公路(2017年2期)2017-03-12
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
河南科技(2014年14期)2014-02-27
