
一套基于直升机平台的伏尔导航系统飞行试验技术研究
2023-06-17 07:17:36王玺鉴
中国科技纵横 2023年7期
王玺鉴
(中国直升机设计研究所,江西景德镇 333001)
0.引言
最初的飞行器在天空中飞行时,需要通过目视的方法记录各航线之间的建筑物、河流、山脉、铁路、公路等标志性的地标来达到不迷失方向的目的,但是该方法受到的局限性很大,经常会发生飞行器因为丢失目标而失去方向的情况出现。为此,科学家们发明了无线电导航台,让飞行器从目视飞行跨越到了仪表飞行。
1920—1930 年,第一代的无线电导航台NDB 台被广泛应用于飞行器的飞行过程中,NDB 台又称归航台,是一种与机载ADF 接收机相配合的地面导航台。NDB 全称是无指向性无线电信标,是设置在地面上的通讯装置,可以使用190kHz ~1750kHz 带,配合机载ADF 接收机可以用来显示机首与地面上的角度。但是,由于NDB 导航方式的自身限制,容易受到地形地貌的影响,会发生较大误差,精度不够准确[1],并且传播距离相对较短且无法判断距离,因此随之发展了新的导航技术VOR 导航台。VOR 台全称甚高频全向信标台,是利用测角原理工作的近程无线电导航系统。VOR 台工作频率为108MHz ~118MHz 的甚高频段,会向机上发射两种信号:一种是相位固定的基准信号,另一种是信号的相位随着围绕信标台的圆周角度连续变化,因此,各个角度发射不同的相位的信号[2]。飞行器上的VOR 接收机通过计算接收到的两个不同相位的信号,即可得出飞行器所处的信标台的发射角度,从而得知自身的方位信息。同样,当只有一台VOR 台时,只能得出飞行器的方位信息,不能提供距离信息。理论是两套VOR系统就可以确定飞行器的位置信息,达到既能判断方位又能知道距离的目的,但是由于VOR 系统的远距离方位误差较大,因此需要配合DME 测距机使用。DME 测距机是一种非自主的脉冲式近程测距导航系统,通过测量无线电波在空间中的传播时间来获取距离信息[3]。当飞行器距离着陆机场比较近时,使用ILS 仪表着陆系统可以使飞行器在低天气标准或者飞行员看不到任何目视参考的天气下进行引导飞行器进场着陆。ILS 仪表着陆系统又称为盲降系统,顾名思义其作用是在飞行员无法肉眼看清跑道的情况下操纵飞行器降落[4]。
1.一套直升机伏尔导航系统试飞
1.1 伏尔导航系统的组成和工作原理
本文介绍的一套伏尔导航系统由VOR 台、DME 台和ILS 仪表着陆系统组成,主要用于直升机的航路导航及进场着陆引导,使其具备仪表着陆系统(ILS)功能、伏尔(VOR)功能、指点信标功能。
甚高频全向信标(VHF Omini-Range)是一种由地面信标台和机载接收指示设备两部分组成的相位测角系统,该系统能够作用的最大距离为200 海里,优于1.4°测角精度。VOR 地面台虽然能全方位发射指点信标,但是存在天线正上方的盲区,因此,在飞行经过地面信标台的正上方时会出现短暂的指点信标信号丢失的现象。甚高频全向信标简称为VOR,其工作频率为108MHz ~118MHz,VOR 系统的工作示意图如图1 所示[5]。

图1 VOR系统工作原理图
DME 导航台是一种非自主的脉冲式近程测距导航系统,其覆盖范围在200 海里以上。DME 导航台通过测量无线电波在空间的传播时间来获取距离信息,由机载询问器和地面台两部分组成,机上设备发射询问脉冲,被地面台接收,经过固定时间的延时,地面台向机上询问器发射信号,机上设备收到应答信号后可通过发射和应答信号之间的时间间隔计算询问器和应答器之间的距离,即为飞行器距离地面台的距离。具体工作原理如图2 所示。
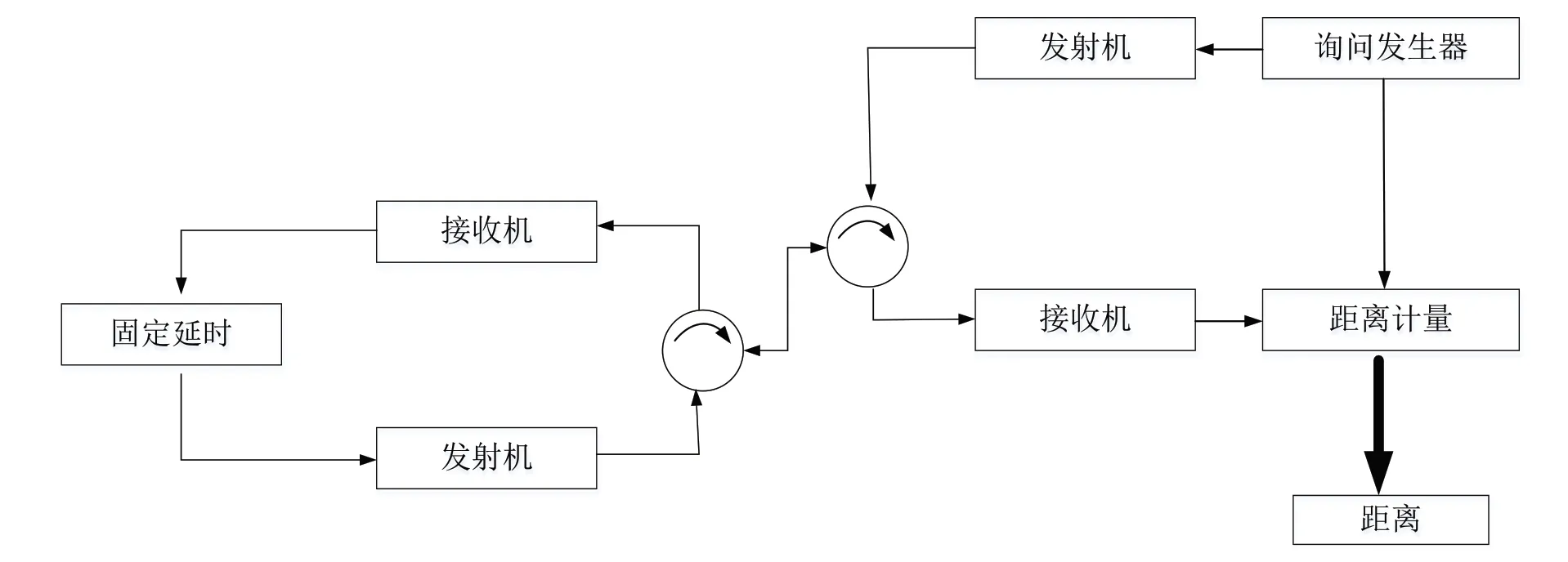
图2 DME系统工作原理图
ILS 仪表着陆系统经过近60 年的发展和完善,已然成为全世界通用的着陆设备。ILS 仪表着陆系统由航向台、下滑台和指点信标台3 部分组成,其中指点信标台又分为内指点信标、中指点信标、外指点信标3 种信标台。航向台安装在距离跑道末端500m 的跑道中心延长线上,与跑道中心组成一个铅垂面。下滑台安装在距离跑道中心150m的跑道一侧,与跑道平面组成一个3°左右的相交倾斜面,得出符合要求的下滑线[6]。内指定信标台安装在距离跑道入口75m ~300m 处且垂直跑道延长线方向偏离不超过30m,中指点信标台安装在距离跑道入口900m ~1200m处且垂直跑道延长线方向偏离不超过70m,外指点信标台安装在距离跑道入口6.5km ~11.1km 处且垂直跑道延长线方向偏离不超过70m[7]。
1.2 一套基于直升机平台的伏尔导航系统试飞
1.2.1 试飞前的准备工作
试飞前需进行对直升机上新增的仪表着陆系统(ILS)、甚高频全向信标(VOR)、近程测距导航系统(DME)进行改装可行性分析、重量重心影响分析、电源容量分析、结构强度分析、电磁兼容分析和六性分析等工作,使新增加的伏尔导航系统满足设计要求,能够达到预定的功能且不影响原直升机平台。在试飞前需要对伏尔导航系统进行航电系统地面联试和电磁兼容性试验,确保各系统工作正常,与之相交联的其他系统工作也正常,不会对直升机上其他平台进行干扰。对试飞的机场的选取也很重要,对于进行伏尔导航系统试飞的机场需要满足以下条件。
(1)告警系统的地形数据库中含有试验机场的地形信息,导航系统的数据库中包含导航信息;(2)试验机场含有需要配合试验使用的指点信标台、航向台、下滑台、VOR台和DME 台等设备需经过民航部门的校验合格。
1.2.2 试飞内容
设置的试飞科目需要考虑某型直升机新增伏尔导航系统的设计与使用需求和试验机场的实际情况,验证伏尔导航设备装机后的装机适应性,验证VOR 设备的作用距离、信号全角度覆盖性、指针方向准确性,验证DME 测距机穿越、进场、爬升、远距离收讯、最大作用距离等功能是否满足设计和使用需求,验证仪表着陆系统的指示正确性。考虑上述因素,设置的试飞内容包括:装机适应性试飞、甚高频全向信标试飞、近程测距导航系统试飞、仪表着陆系统试飞等。
(1)装机适应性试飞。通过直升机悬停、近地面机动、起落航行飞行、空域飞行等飞行姿态,验证直升机新增伏尔导航系统的设备安装是否牢固、对机上平台是否具有电磁干扰、设备的工作是否正常等。
(2)甚高频全向信标试飞。VOR 作用距离:直升机以气压高度2000m,指示空速180km/h 沿试验机场的跑道方向背台飞行至距离VOR 台最大作用距离的位置,飞行过程中检查VOR 指针和数据是否出现丢失情况;飞过最大作用距离后再沿航线向台飞行,飞行过程中检查VOR 指针和数据是否出现丢失情况。
1)VOR 圆弧:直升机以气压高度2000m,试验机场为中心,半径为10km,分别以顺时针和逆时针各盘旋飞行一周,检查VOR 台的指针和数据是否出现丢失现象。2)VOR引导着陆:直升机飞行至距离试验机场20km 处,气压高度1000m,按VOR 引导方式进行着陆引导,按照VOR 引导方式操纵直升机,将直升机引导至试验机场跑道上空;沿着跑道继续前飞,检查VOR 引导的“向台-背台”能正确改变指向。
(3)近程测距导航系统试飞。DME 爬升和最大作用距离:直升机距DME 地面台20km,离地高度600m,指示空速180km/h 向台飞行,飞过DME 地面台10km ~20km后,以气压高度2100m 平飞,期间航向保持背台径向航向,直升机飞至距离DME 地面台最大作用距离,飞行至测距器信号丢失,记录最大距离。
1)DME 远距离收讯:直升机距DME 地面台背台飞行,气压高度2100m,指示空速180km/h,至距DME地面台最大作用距离时,以坡度8°~10°向右360°转弯,观察期间测距器信号丢失情况;回到径向航向至距DME地面台最大作用距离时以坡度8°~10°向左360°转弯,观察期间测距机信号丢失情况。2)DME 穿越和进场:直升机距DME 地面台20km 朝向DME 地面台飞行,气压高度2100m,指示空速180km/h,至距DME 地面台15km 时,以8m/s 的下降速度下降至气压高度1500m,距DME 地面台10km ~12km,观察直升机下降期间测距机信号不得丢失;直升机距DME 地面台20km,朝DME 地面台进场着陆飞行,期间观察测距机信号不得丢失(过台除外)。
(4)仪表着陆系统试飞。在直升机上设置试验机场的ILS 台工作频率,直升机飞至距跑道入口25km 左右,气压高度1300m,截获航向信号后,按进场着陆引导画面航迹偏离指示航向指引,继续进场,直至截获下滑信号,然后按进场着陆引导画面航向下滑偏离指示航向指引直升机下滑(下滑角约为3°),引导直升机着陆到试验机场;着陆后再次起飞,向左拉起转回至进场方向离跑道入口18km 处,气压高度900m,再次引导进场,下滑至离地高度60m 决断高度,再向右拉起转回至进场方向离跑道入口18km 处,气压高度900m,再次引导着陆,检查航向宽度及偏航向指示的正确性;直升机再次起飞到进场方向距跑道入口18km 处,离地高度400m,以航迹偏离指示航向指引,保持离地400m 高度平飞通过跑道入口,检查下滑道宽度及上下偏航指示的正确性,飞行示意图如图3 所示。
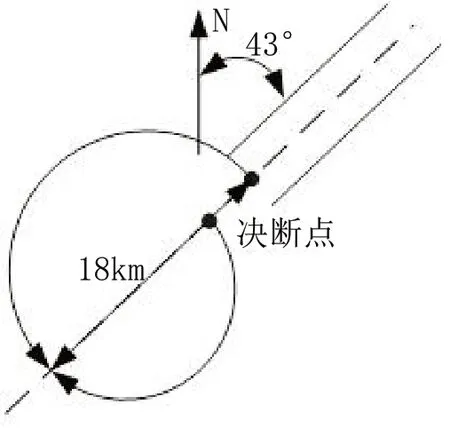
图3 ILS引导着陆示意图
1.3 数据误差分析
VOR 导致的误差标准差的基本表达式为下式(1),式中L 为直升机到VOR 地面台的距离,GS error 为地面台的误差,Airborne error 为包括接收机噪声在内的机载误差的标准差。
将VOR 地面台提供的径向信号的高斯误差设定为平均值为0、标准差为7°,机载接收机的标准偏差精度为1°,可以推导出式(2)。
DME 导致的误差标准差的基本表达式为下式(3),式中,K为常值系数,D为直升机到DME 地面台的距离,GSerror为地面台的误差,Airerror为空中误差。
依据航空无线电技术委员会的《区域导航所需要导航性能最低航空系统性能标准》,对于1989 年1 月1 日以后的DME 系统的误差小于0.2 海里(95%),因此可以得出[8]
以VOR/DME方式下定位标准差长轴1σ 的计算表达式为
实际导航性能(ANP)的公式为
其中,转换因子k与1σ误差椭圆的长短轴半径的比例有关,k的值最终趋近于1.9625,通过上式,以直升机估计位置为原点可以得出1σ误差椭圆,以及95%等概率误差圆和所需任务性能RNP的值为半径的圆,如图4 所示。若95%等概率误差圆落入RNP值的半径圆内,则导航系统的ANP<RNP满足要求,否则不满足要求。
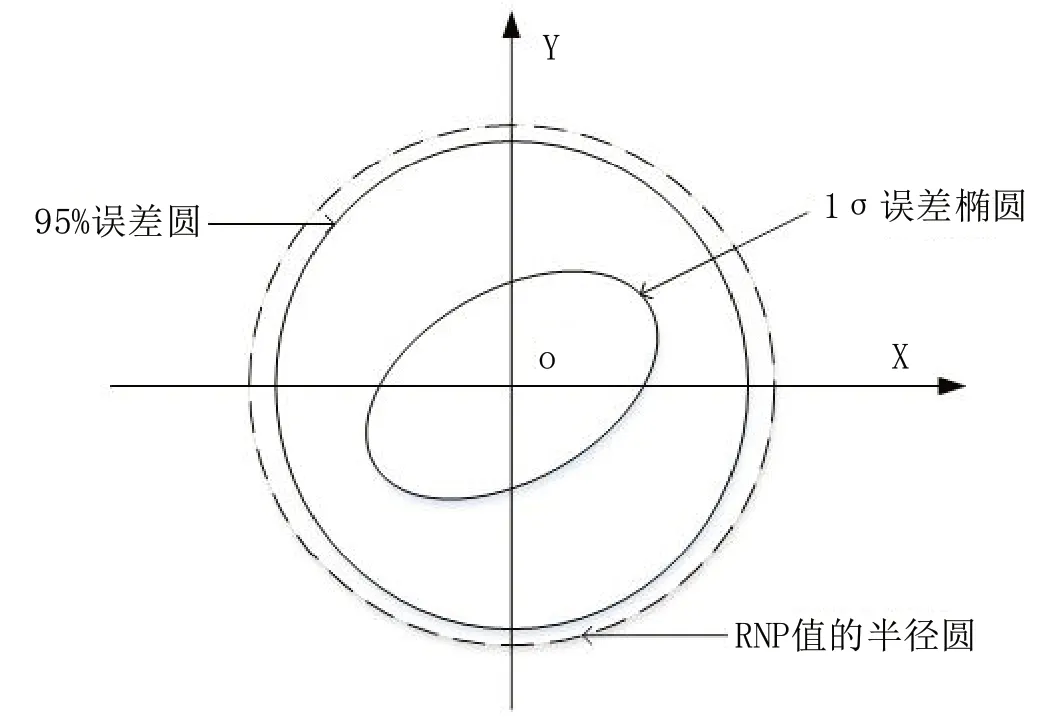
图4 ANP误差图
1.4 试飞结果
通过对某型机新增的伏尔导航系统进行试飞验证,通过查看飞行参数记录系统和视频记录仪及试飞员评述可以得出以下结论。
(1)通过直升机的装机适应性飞行验证了伏尔导航系统工作正常、安装牢固、与机上其他设备不存在电磁干扰现象;(2)通过直升机的甚高频全向信标飞行验证了直升机平台上的VOR 台的作用距离、圆弧飞行、引导着陆等功能正常,满足设计和使用要求;(3)通过直升机的近程测距导航系统飞行验证了直升机平台上的MED 台的爬升、穿越、进场、远距离收讯、最大作用距离等功能正常,满足设计和使用要求;(4)通过直升机的仪表着陆系统飞行验证了直升机平台上的ILS 台的引导着陆功能正常,满足设计和使用要求。
2.结论
本文简要介绍了飞行器的导航台发展历程,具体介绍了一套直升机上装载的伏尔导航系统的组成、工作方式和原理,说明了改型机的伏尔导航系统的试飞前的准备工作和试飞内容,根据试飞结果和数据误差分析情况得出相应的试飞结论,为后续的其他飞行器的伏尔导航系统飞行试验提供参考。
在验证伏尔导航系统的试飞项目时,应按照实际的使用需求设置试飞科目,兼顾试飞工作的效率和试飞完成的质量,对于试飞结果的判断要全面考虑飞行参数系统记录的数据、视频记录仪记录的画面和试飞员的评述意见。该试飞科目为航电设备试飞科目,风险性不高,但是试飞过程中需要排除各种干扰因素,防止对飞行结果产生干扰,导致飞行数据准确性降低。
猜你喜欢
——列斐伏尔《日常生活批判》第三卷解读
广东社会科学(2024年1期)2024-05-09 09:02:18
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
——解读列斐伏尔《日常生活批判》
理论界(2020年8期)2020-03-03 05:46:11
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
传感器世界(2019年10期)2019-02-17 14:51:59
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
电子制作(2017年24期)2017-02-02 07:14:16
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
