基于OpenHarmony的新型智能电动吸痰器
2023-05-29 10:19陈元亮戴洋毅
软件导刊 2023年5期
陈元亮,戴洋毅,瑚 琦
(1.上海理工大学 光电信息与计算机工程学院;2.上海市现代光学系统重点实验室,上海 200093)
0 引言
冬春季是各类呼吸道疾病的高发期,老年患者因体弱、咳痰反射差,容易出现痰液堵塞呼吸道问题,若痰液清理不及时,轻则导致患者呼吸困难,重则窒息死亡[1-2]。吸痰术是排除呼吸道潴留分泌物的有效方法之一,在临床上已得到广泛应用[2-4],吸痰器是吸痰术必备的医疗器件之一。
然而,传统吸痰器无法脱离市电使用,因此在户外、急救、野战等场景下无法使用。并且,传统吸痰器由于操作繁琐、智能化程度低、无吸痰计时功能等缺陷,存在较高的医疗风险,阻碍了吸痰器的广泛应用。随着5G、物联网等技术与医疗行业的深度融合,智慧医疗逐渐成为国家重要的战略资源,使用嵌入式技术赋能传统医疗器械成为当下热点研究话题[5]。
目前,便携式电动吸引器大部分使用蓄电池供电,可应用于户外、急救和野战场景,但无法调整吸引负压,对不同年龄段病人的普适性不足[6-7]。经过改良的电动吸痰器增加了机械调压装置调整吸引负压,但存在操作繁琐、耗时长、使用不灵活等缺陷[8]。智能化程度更高的多功能微型电动吸痰器使用按钮选择吸痰负压档位,方便快捷,但无法显示吸痰时长,存在吸痰操作超时风险,并且设计成本较高,不利于大面积推广[9]。
针对上述不足之处,本文设计了一种基于OpenHarmony 操作系统的智能电动吸痰器。通过嵌入式技术,结合气压传感器与动态双阈值算法实现吸痰压力快速调节、过压保护、吸痰计时功能。此外,该设备使用锂电池供电,摆脱了市电限制,可应用于户外、急救和野战等场景,相较于传统吸痰器操作更简单,智能化程度更高,可对吸痰操作精准计时并显示,降低了医疗风险。
1 系统整体架构
如图1 所示,电动吸痰器系统由控制器、负压泵、电磁泄压阀、气压传感器、缓冲瓶和过滤器组成,临床吸痰时还需连接储液瓶、真空控制装置、吸痰管,设备实物图如图2所示。
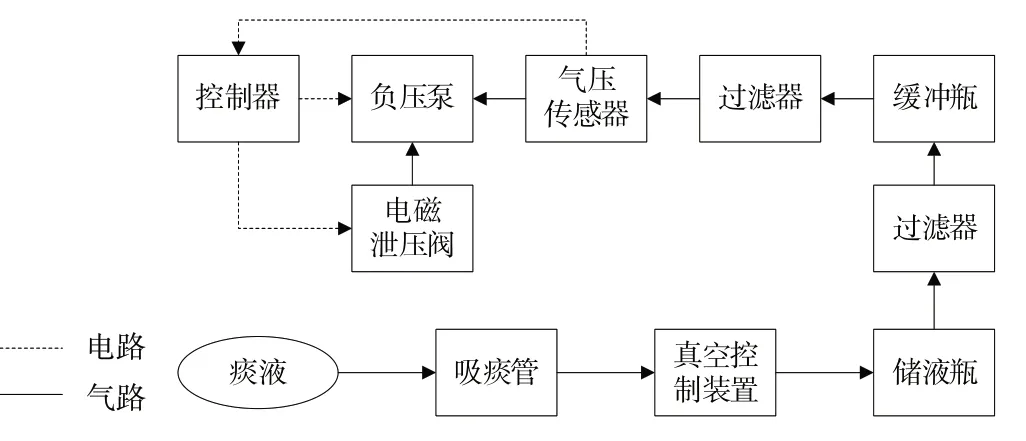
Fig.1 System design framework图1 系统设计框架
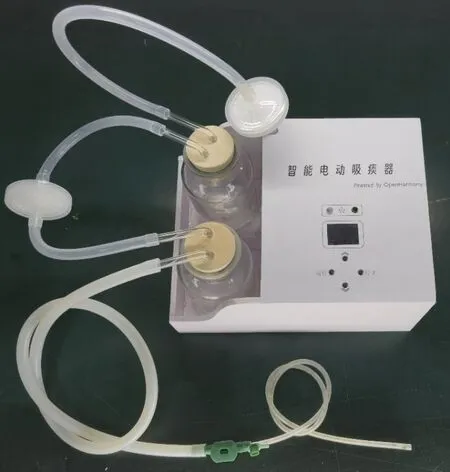
Fig.2 Physical equipment图2 实物设备
临床行吸痰术时,操作者首先在无菌条件下手持吸痰管经患者口鼻进入患者呼吸道,随后将吸痰管撤回2cm,打开真空控制装置,痰液将在大气压差作用下进入储液瓶。
在系统组成部分中,缓冲瓶、过滤器可有效阻止痰液及水汽进入设备内部,避免设备损坏。气压传感器用于监测气路负压大小。控制器根据操作者选择的吸痰负压值控制负压泵运行产生负压,当气路负压过高时,控制器将开启电磁泄压阀对气路进行泄压,以确保气路负压维持在安全范围内。
2 系统设计
2.1 硬件设计
如图3 所示,系统硬件由处理器、锂电池、人机交互模块、传感器模块、驱动模块组成。其中,处理器采用华为海思Hi3861V100 芯片,主要负责处理各传感器数据及控制执行机构动作;人机交互模块由显示屏、按键和声光报警电路组成,按键设计采用硬件滤波电路,可有效解决因机械抖动引发的重复触发问题;声光报警电路由三极管驱动的有源蜂鸣器与LED 组成;传感器模块由气压传感器、电池电量监测传感器组成,气压传感器选用BMP280 芯片,该芯片测量范围为300~1100hPa(绝对压力),具有高精度、高线性度和长期稳定性优点;电池电量传感器选用CW2015芯片,该芯片能跟踪电池的运行状况估算电池电量;驱动模块由负压泵驱动电路和电磁泄压阀驱动电路组成;驱动电路由IVCR2405 驱动芯片和LR7843 场效应管组成,可满足负压泵长时间稳定运行和电磁泄压阀快速开闭的需求。
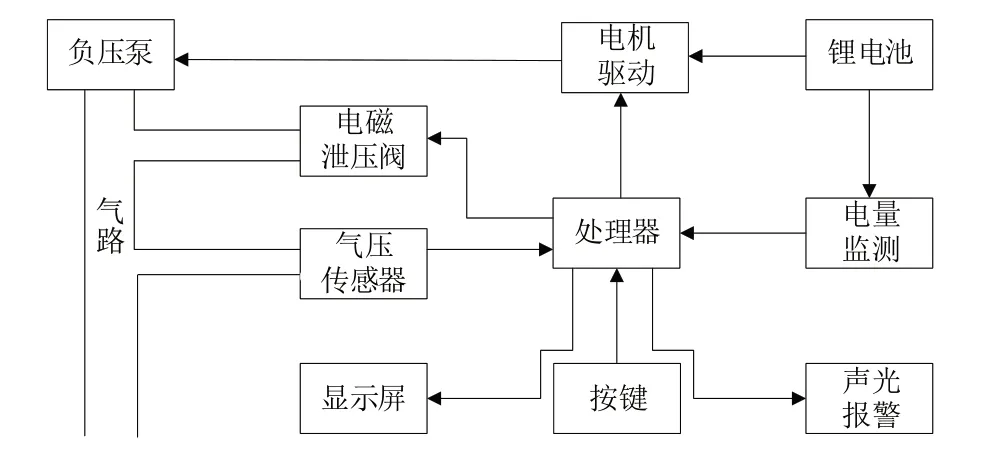
Fig.3 Hardware design framework图3 硬件设计框架
2.2 软件设计
图4 为软件设计方案,该软件基于OpenHarmony 操作系统进行开发,主要由人机交互任务、气压检测任务、负压泵驱动任务组成。

Fig.4 Software design solutions图4 软件设计方案
2.2.1 OpenHarmony操作系统
OpenHarmony 是由开放原子开源基金会孵化运营的开源项目,是面向全场景、全连接、全智能时代的一个智能终端设备操作系统。该系统采用微控制器软件接口标准(Common Microcontroller Software Interface Standard,CMSIS),可实现业务代码跨平台的快速移植[10-11]。
目前,OpenHarmony 支持轻量系统、小型系统、标准系统,轻量系统主要面向硬件资源有限的微控制器(Microcontroller Unit,MCU)类处理器设备,采用轻量级物联网操作系统(LiteOS)内核,针对不同系列芯片又可分为LiteOSM、LiteOS-A。
本文系统所使用的LiteOS-M 内核具有体积小、功耗低、性能高的优点,包含硬件相关层与无关层。其中,硬件相关层提供统一的硬件抽象层接口(Hardware Abstraction Layer,HAL);硬件无关层包含基础内核与扩展内核,基础内核提供任务调度、内存管理、通信机制、中断异常、时间管理和软件定时器功能,扩展内核提供C++支持、文件系统、网络模块等组件能力。
任务调度支持多任务,采用抢占式调度机制[12-13],具有32 个优先级,高优先级任务可打断低优先级任务,相同优先级任务支持时间片轮转调度[14]。通信机制包括事件、消息队列、互斥锁、信号量,事件用于任务间同步操作,消息队列用于任务间通信,互斥锁保证资源不会被多个任务同时访问,信号量是一种锁机制,用于限制同一时刻对同一资源访问的最大任务数目[15]。
时间管理是以系统时钟为基础,为应用程序提供所有与时间相关的服务[16]。软件定时器基于系统时钟中断,由软件模拟的定时器,解决了硬件定时器易受限于硬件资源的问题,扩展了定时器数量,当软件定时器经过设定的系统时钟计数值时则触发用户定义的回调函数,执行相应操作。
系统上电运行时,OpenHarmony 操作系统首先创建一个临时任务,在临时任务中再创建消息队列、事件集、各子任务,之后销毁临时任务并开始运行各子任务。
2.2.2 人机交互任务
由于不同年龄段的病人使用吸痰器时所需吸痰负压不同,因此吸痰负压档位可调功能必不可少。根据国内研究记录[3,6,8,17-18],系统设置13.3kPa(儿童)、26.6kPa(弱)、33.25kPa(中)、40kPa(强)和53.3kPa(浓痰)共5 个吸痰负压档位。
图5 为人机交互任务流程,任务主要由按键检测、显示屏显示、声光报警功能组成。首先,操作者通过面板上“上”“下”“运行”“停止”按键选择合适的吸痰档位,系统向消息队列中写入被选定的吸痰负压值后开始运行。然后,系统获取吸痰操作计时值,并判断吸痰是否超时,若吸痰时长超过12s 将亮起红色LED 灯,蜂鸣器以1Hz 的频率发出提示音;若吸痰时长超过15s将快速闪烁红色LED 灯,蜂鸣器发出急促警报声,提醒用户尽快结束本次吸痰操作,避免患者因气管痉挛导致缺氧窒息。最后,显示屏刷新显示内容。
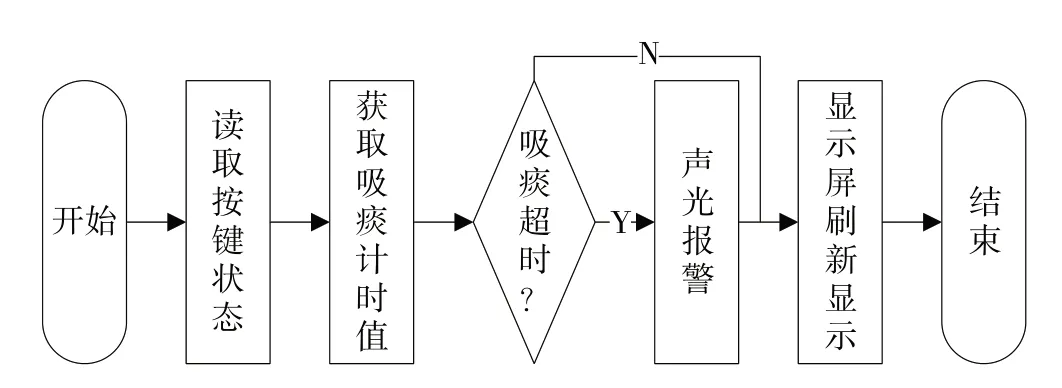
Fig.5 Human machine interaction task flow图5 人机交互任务流程
2.2.3 气压检测任务
传统电动吸痰器通常采用指针式气压表显示当前气路负压值,但该方法所使用的负压表通常采用纯机械结构进行测量并显示,精度易受环境温度影响,既无法准确反馈真实的负压值,又无法保证气路负压值保持在目标负压值内,存在一定的医疗风险。因此,本文系统采用气压传感器,结合环境温度修正气压数据,保证在不同温度环境下输出的气压值准确无误。
气压检测任务由传感器初始化、数据采集、数据滤波、算法识别和数据写入组成。任务开始时,系统通过集成电路总线(Inter-Integrated Circuit,IIC)向传感器依次发送复位、保持时间、滤波器、压力过采样等设置命令,随后读取出厂校准数据,完成传感器初始化工作。任务主循环中,系统首先通过IIC 总线读取传感器原始温度和气压数据,结合出厂校准数据计算真实气压值。
然而,由于隔膜泵会产生脉冲式负压,导致气压传感器采集的数据呈现波动状态。为此,系统首先采用移动平均算法对数据进行预处理,处理效果如图6 所示;然后使用阈值算法识别吸痰管真空控制装置开闭状态并对吸痰操作进行计时;最后将预处理后的气压数据和吸痰计时数据写入消息队列。
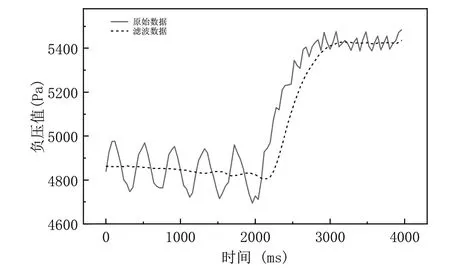
Fig.6 Moving average algorithm processing effect图6 移动平均算法处理效果
2.2.4 负压泵驱动任务
由于吸痰负压过高可能导致患者呼吸道黏膜损伤、肺不张和低血氧症[17-19],因此保证气路负压不超过设定吸痰负压值至关重要。
传统电动吸痰器负压泵多采用固定功率运行,若患者所需吸痰负压较低,而负压调整装置泄压速度较慢,将导致气路负压过高,增加医疗风险。因此,本文系统根据设定的吸痰负压值数据动态调整负压泵运行功率,再结合气压传感器数据控制电磁泄压阀开启的频率和时长,实现过压保护功能。该设计不仅能大幅降低设备电能消耗,还能保证气路负压不超过设定值,提高了设备安全性。
3 吸痰计时功能实现
由于吸痰过程中病人的氧气会被部分或完全中断,所以吸痰持续时长不宜过长。目前,公认的吸痰持续时长应小于15s[9,17-21],然而传统吸痰器并不具备吸痰计时功能,若操作者操作时未能控制吸痰时长,将导致患者呼吸道痉挛,增加医疗风险。
为此,本文系统使用气压传感器,结合阈值识别算法主动识别吸痰操作开始的动作并计时,当吸痰超过12s 时发出弱提示,当吸痰超过15s时发出强警告,提醒操作者尽快结束吸痰操作。
3.1 状态机
为了便于编程和数据分析,系统引入状态机进行管理,运行状态分别为待机、就绪和吸痰。其中,待机表示设备开机但负压泵和真空控制装置关闭;就绪表示负压泵工作,气路产生负压,真空控制装置保持关闭,患者端不产生负压;吸痰表示真空控制装置开启,患者端产生负压。起始状态为待机,状态转换如图7所示。
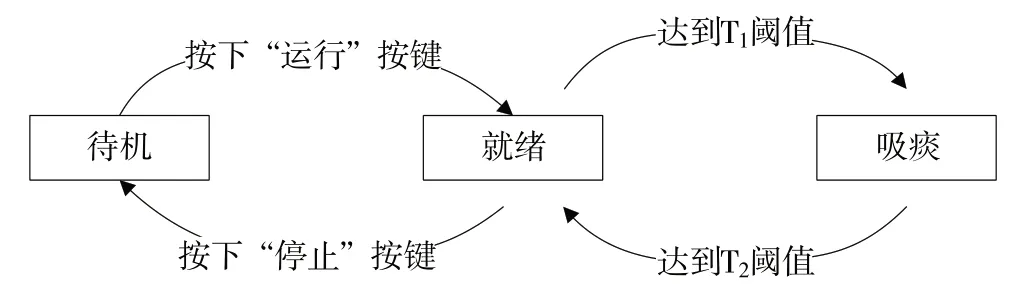
Fig.7 State machine state transition图7 状态机状态转换
3.2 阈值识别算法
静态阈值识别法是根据经验配置固定的阈值,当超过或低于该阈值时即刻触发相应动作。本文系统共设置5个吸痰负压档位,每个档位产生的负压值各不相同,若使用相同阈值将导致不同档位识别延迟不一致,不便于后续处理。
动态阈值识别法基于系统运行数据,实时调整识别的阈值。在动态单阈值识别法中,某一吸痰档位仅设置一个阈值用于识别,当超过或低于该阈值时触发相应动作,但当信号反复振荡,多次穿过阈值时会导致识别结果抖动,影响系统稳定性,因此通常在识别成功后加入一个时间窗口,在该时间窗口内不再进行识别。然而,该方法无法保证时间窗口结束后信号是否稳定,识别结果会出现间断性反复振荡现象。为解决这一潜在风险,本文系统引入动态双阈值识别算法,即当系统处于就绪状态时,使用阈值T1作为识别阈值;当系统处于吸痰时,使用阈值T2作为识别阈值。
式中,x为吸痰档位的负压值,单位为Pa。
3.3 实验结果与分析
本文在实验时使用1.5%浓度的POLYOX 水溶性树脂混凝剂作为模拟痰液,该浓度溶剂与人类气道分泌的痰液的粘度和表面特性类似[22]。
图8 为分别使用动态单阈值和动态双阈值识别算法对同一段数据进行识别的结果,该段数据采集自40kPa(强)档位且刚打开真空控制装置的场景。由于吸痰管中含有湿润吸痰管时残留的生理盐水,因此气路负压在上升的过程中出现多次波动。
由图8(a)可见,动态单阈值识别法由于数据波动,系统在吸痰、就绪阶段反复变化,导致吸痰计时被反复重置。由图8(b)所示的动态双阈值识别法可见,系统首先使用数值较大的T1作为识别阈值,当系统处于吸痰状态时使用数值较小的T2作为识别阈值,由于图中负压数据高于T2,因此识别结果并未出现反复变化的现象。
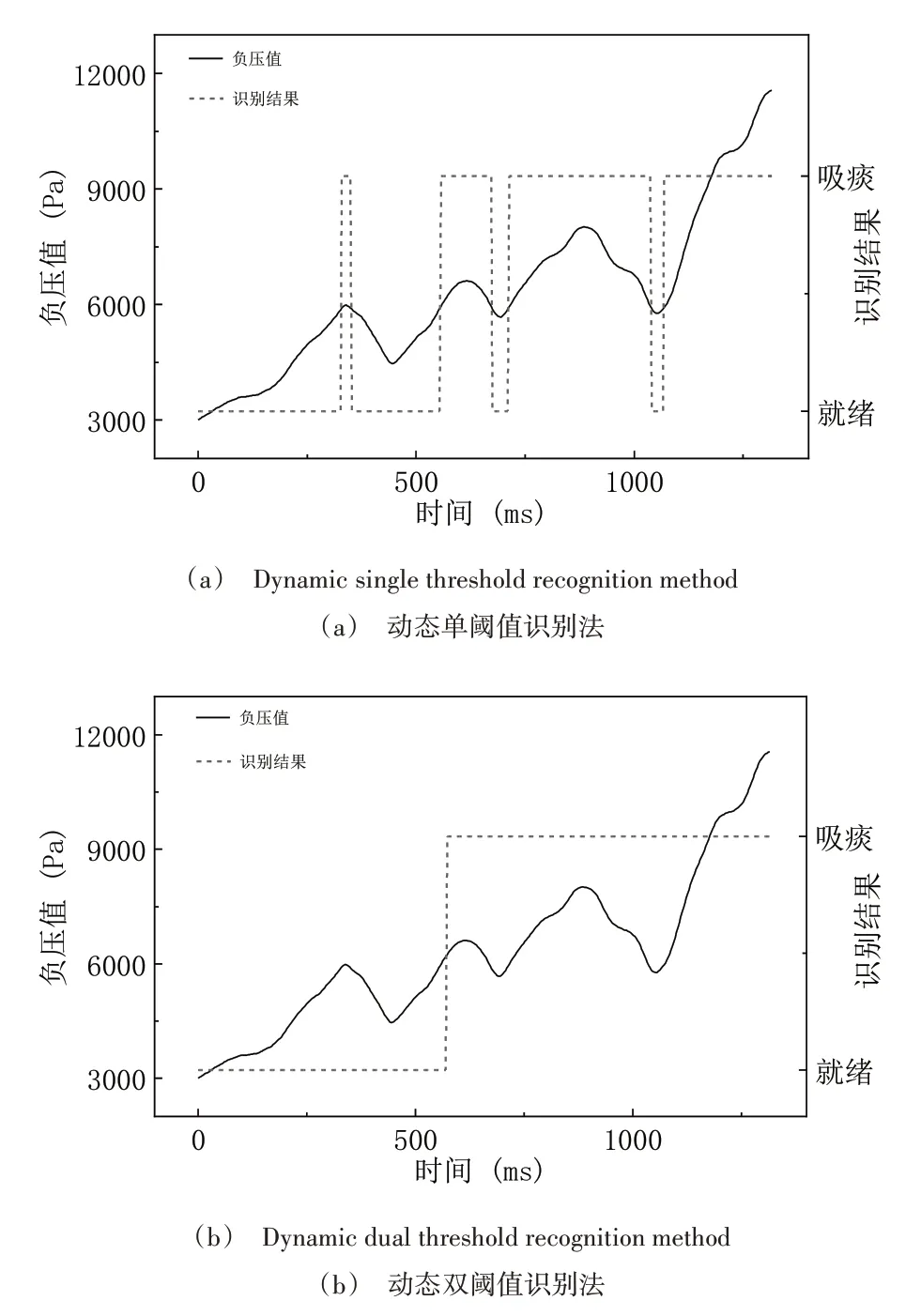
Fig.8 Comparison of recognition effects of different recognition algorithms图8 不同识别算法识别效果比较
通过比较图8(a)、图8(b)的识别起点可知,动态双阈值识别法要慢于动态单阈值识别法。为了准确测量识别算法的延迟大小,实验测试时在吸痰管真空控制装置处加装了一个电子开关,并接入处理器,当开闭真空控制装置时,电子开关将同步触发,系统便可采集到触发信号并通过串口输出至电脑端。
图9 为电脑端采集的大量数据中随机抽取的一段数据绘制的曲线,该段数据来源于13.3kPa(儿童)档位且打开真空控制装置,等待气路负压稳定后吸痰的场景。由此可见,识别结果的起点明显迟于真空控制装置开闭时刻。分析表明,该延迟主要来源于移动平均算法和缓冲瓶。
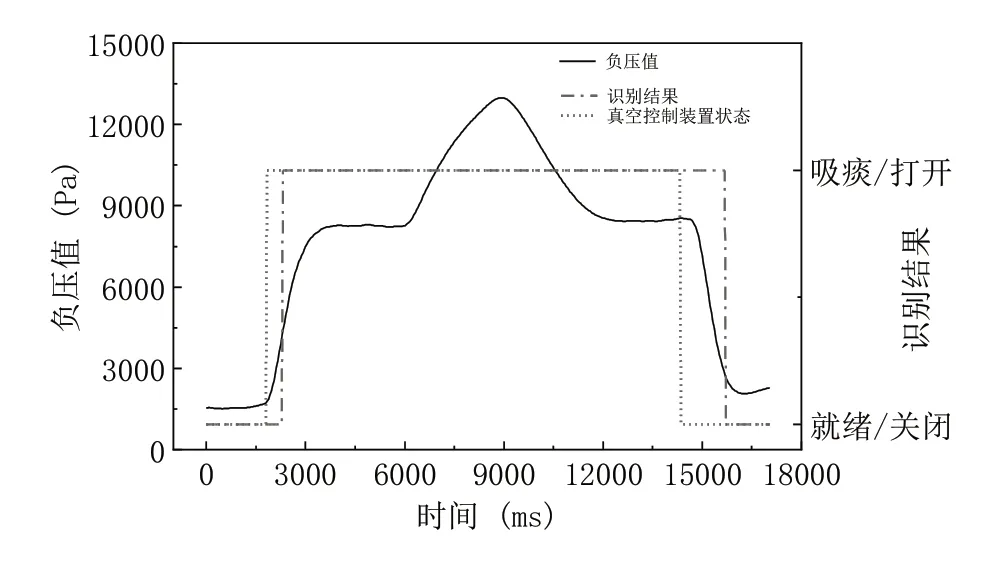
Fig.9 Delay test results图9 延迟测试结果
通过多次实验测试可知,从打开真空控制装置到算法识别出该动作的延迟均值为440ms,该延迟与吸痰负压档位无关,与是否等待负压稳定后再开始吸痰操作相关。为此,系统显示屏将在显示时主动补偿440ms以抵消延迟。
由实验数据可知,从关闭真空控制装置到算法识别该动作的延迟均值为1 776ms,由于关闭真空控制装置时患者端负压即刻消失,故该延迟并未对患者造成任何损伤,因此不作处理。
通过上述实验测定,本文所设计的系统工作稳定,鲁棒性较强,识别开闭吸痰管真空控制装置及时,吸痰计时精确,适用性和可行性较高。
4 结语
本文设计实现的基于OpenHarmony 操作系统的智能电动吸痰器,通过使用嵌入式技术,结合气压传感器和动态双阈值算法实现吸痰压力快速调节、过压保护、吸痰计时功能。系统简化了吸痰术的操作流程,缩短了吸痰术前的准备时间,减轻了吸痰术中操作者的负担,降低了患者因吸痰超时造成气管痉挛和缺氧加重的风险。
实验测定,设备运行稳定可靠,吸痰负压调节快速精确,吸痰计时准确,具有广泛的应用前景。然而,由于算法识别存在延迟问题,而OpenHarmony 具有强大的分布式和物联网能力,后续将与科室智慧医疗设备进行联动,以进一步降低吸痰动作信号的延迟。
猜你喜欢
车迷(2022年1期)2022-03-29
中国化妆品(2020年9期)2020-10-09
航天控制(2020年5期)2020-03-29
小学生学习指导(低年级)(2019年10期)2019-11-26
机电元件(2018年4期)2018-08-09
小学生学习指导(低年级)(2017年12期)2017-11-22
河南科技(2015年2期)2015-02-27
电测与仪表(2014年15期)2014-04-04
振动、测试与诊断(2014年5期)2014-03-01
河南科技(2014年12期)2014-02-27