基于迭代学习控制的下肢外骨骼康复训练机器人运动策略
2023-05-22 09:11曾永阳罗春阳王延振李海连王晓昌王小平
北华大学学报(自然科学版) 2023年3期
曾永阳,罗春阳,王延振,李海连,陆 玥,王晓昌,王小平,田 阳
(北华大学机械工程学院,吉林 吉林 132021)
截至2020年底,我国60岁及以上人口达2.55亿,约占全国总人口数的18%,并且老龄人口比重还在持续增大[1].随着人口老龄化程度的不断加剧,脑卒中、脊髓损伤等疾病的发病率逐年提高,这些疾病严重影响患者的下肢运动;此外,由于摔伤、交通事故、自然灾害等导致下肢肢体障碍的患者数量不断上升.临床研究[2]表明:人体的中枢神经系统具有很高的恢复能力和可塑性,在接受治疗的同时,结合一些康复训练,对治疗效果和神经恢复具有良好的促进作用.
随着康复治疗学、智能化控制学以及机器人技术的快速发展,利用下肢外骨骼康复训练机器人进行康复训练逐渐成为下肢肢体运动障碍患者的主要训练手段,而下肢外骨骼康复训练机器人系统的运动控制策略直接影响患者康复训练效果[3].目前,在下肢外骨骼康复训练领域应用较多的运动控制策略有计算力矩控制、自适应控制、零力矩点控制、表面肌电信号控制等[4].其中,计算力矩控制算法的控制精度依赖于系统动力学模型的精确度,控制效果一般[5];自适应控制(AC)通过修正自身特性来适应被控对象和外界扰动变化,但需要在线辨识估计控制器参数,计算量大,控制精度容易因信息的模糊处理而下降[6];零力矩点(ZMP)控制需要提前将角度传感器安装在使用者身上来获取信息,缺少便捷性[7];表面肌电(sEMG)信号控制模糊性强,抗干扰差,且不具有通用性[8].轨迹跟踪控制效果的优劣会在很大程度上影响患者康复训练的恢复效果和肢体安全[9].随着下肢外骨骼设备应用场景愈发复杂多样,以及患者对下肢康复训练设备精度要求的不断提高,采用能够实现高精度轨迹跟踪的运动控制策略变得尤为重要.
迭代学习控制具有不依赖系统模型精度的特点,并且能够根据上一次系统输出结果误差调节系统下一次输出,通过不断学习,实现高精度控制,也因此被广泛应用于机械臂的运动控制,但针对下肢运动控制的迭代学习策略还鲜有报道.本文将迭代学习控制应用在下肢外骨骼康复训练机器人运动控制中,分析人体下肢结构与运动特征,确定下肢各关节的运动形式与活动范围;采集正常人体行走步态数据,作为迭代学习控制器运动仿真的期望轨迹;采用拉格朗日法对下肢外骨骼康复训练系统进行动力学分析与建模;根据下肢外骨骼康复训练机器人运动控制系统的特点设计迭代学习控制器,并通过MATLAB进行仿真.
1 人体下肢运动机理
1.1 人体下肢结构
为准确描述人体下肢结构和步态运动机理,采用人体解剖学和临床医学定义人体坐标系[10],见图1.坐标轴及坐标平面构成人体基本参考系,通过相互垂直的矢状轴、冠状轴、垂直轴以及矢状面、冠状面、水平面描述人体的空间结构及位置关系.

图1 人体空间坐标系[10] Fig.1 Human spatial coordinate system[10]
人体下肢主要包括大腿、小腿和足部3个部分,各部分通过关节相互连接.其中,髋关节连接大腿骨骼与人体上肢、躯干,主要承担人体上肢、躯干的重量,并保持运动过程中的人体平衡;膝关节连接大腿骨骼与小腿骨骼,主要承受关节力矩并控制下肢运动;踝关节连接小腿骨骼和足部骨骼,主要调整足部姿态,并具有一定的运动缓冲作用.
关节间通过肌肉、韧带和中轴骨等人体组织相连接,组成精密的人体结构.正是人体下肢各骨骼、关节与肌肉之间的相互配合才实现了人体的行走功能.表1为各关节在不同坐标面下运动的平均范围,可作为步态参数测量、患者下肢自由度限制及外骨骼设计的基础.
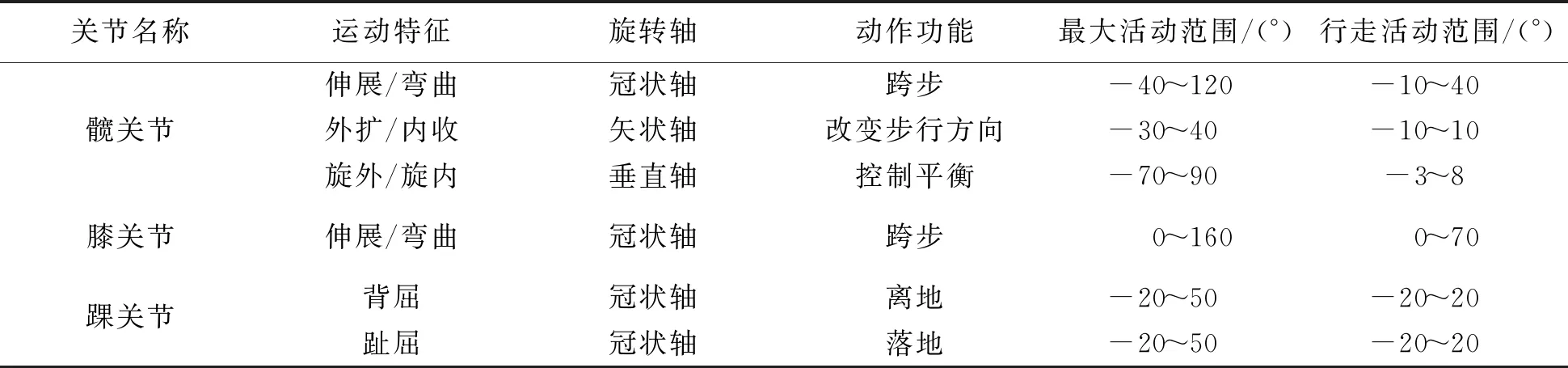
表1 髋、膝、踝关节运动形式与活动范围Tab.1 Motion forms and range of hip,knee and ankle joint
1.2 人体下肢运动分析
设计下肢外骨骼康复训练机器人运动策略需要充分了解人体下肢步态运动规律,因此,分析人体下肢运动十分必要.行走过程中,人体下肢所表现出的姿态称为步态,健康人体正常步态是呈周期性的,一个完整步态周期见图2.由图2可知:一个步态周期为左下肢与右下肢各完成1次迈步动作.以右脚刚接触地面为一个步态周期的起始点,首先,人体着力点逐渐从左下肢移至右下肢,进入右足支撑、左足准备离开地面状态;接着进入右足独立支撑状态,左腿单腿摆动,完成向前迈步动作,进入左足触地状态,完成整个步态周期的50%[11].在一个步态周期内,下肢存在两种状态,分别为支撑状态和摆动状态.支撑状态指人体足后跟接触地面到足尖离地,约占整个步态行进周期的60%;摆动状态指足尖离地到足后跟接触地面,约占整个步态行进周期的40%.支撑状态又分为单腿支撑状态和双腿支撑状态,单腿支撑状态约占支撑周期的25%,双腿支撑状态约占支撑周期的75%[12].就步态规律而言,男、女之间无明显差异.人体双侧下肢呈交替性重复运动,所以,由一只腿部步态参数就可以确定整个下肢步态运动过程.关节角度的变化对于步态的特点诠释最为明显,可以代表人体下肢步态运动过程.

图2 人体步态运动周期[12]Fig.2 Human gait motion cycle[12]
1.3 下肢步态数据采集与分析
为获得正常人行走的步态数据,拆除外骨骼驱动装置,同时增设位移量采集装置,见图3.通过传感器识别、标记以正常步态行走过程中人体下肢各关节坐标点数据,并实时反馈给上位机.为保证步态参数具有普遍性,寻找10位没有下肢腿部肌肉、神经疾病的试验者进行试验.受试者以2~3 km/h的行进速度沿直线匀速前行.为保证试验质量,防止身体疲劳,行走5次为1组,完成1组试验后休息5 min进行第2组试验.通过试验,得到行进过程中下肢各关节点的坐标数据.

图3 正常步态信息采集Fig.3 Information acquisition of normal gait
根据上位机存储的坐标点数据,通过关节角度三维向量变换将由传感器测得的位移量转换为关节角度变化量,并通过MATLAB对其进行拟合处理.循环步态周期为2 s,各关节点取各次试验角度的平均值作为标准数据.图4为1个周期内下肢髋关节、膝关节角度变化曲线,可为下肢外骨骼动力学分析提供数据支撑,并作为后续对下肢外骨骼康复训练机器人进行运动控制仿真时的关节角度变化期望轨迹.
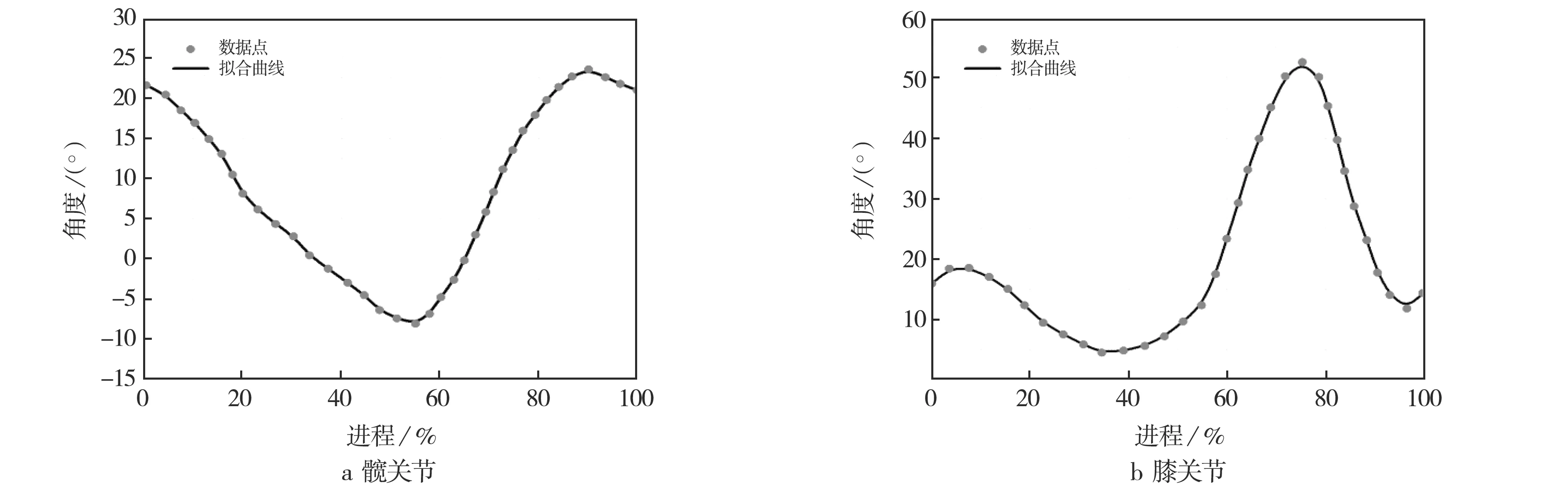
图4 下肢关节角度Fig.4 Lower limb joint angles
2 下肢外骨骼动力学分析与建模
动力学建模是分析下肢外骨骼康复训练机器人各关节所需驱动力或力矩,以及运动过程中进行下肢步态分析与算法研究的理论基础[13].由1.2节中的下肢运动分析可知,人体行进过程中两侧下肢呈交替性重复运动,所以本文仅分析单侧下肢运动变化,并将大腿和小腿简化为两连杆机构进行动力学建模.如图5所示,对下肢单腿简化模型建立坐标系,坐标原点在髋关节处,以x轴水平向右为x轴正方向,y轴水平向下为y轴正方向;大腿杆长度为L1,小腿杆长度为L2;大腿杆质量为m1,小腿杆质量为m2;D为大腿杆质心,E为小腿杆质心;I1和I2分别为大腿杆和小腿杆的转动惯量.
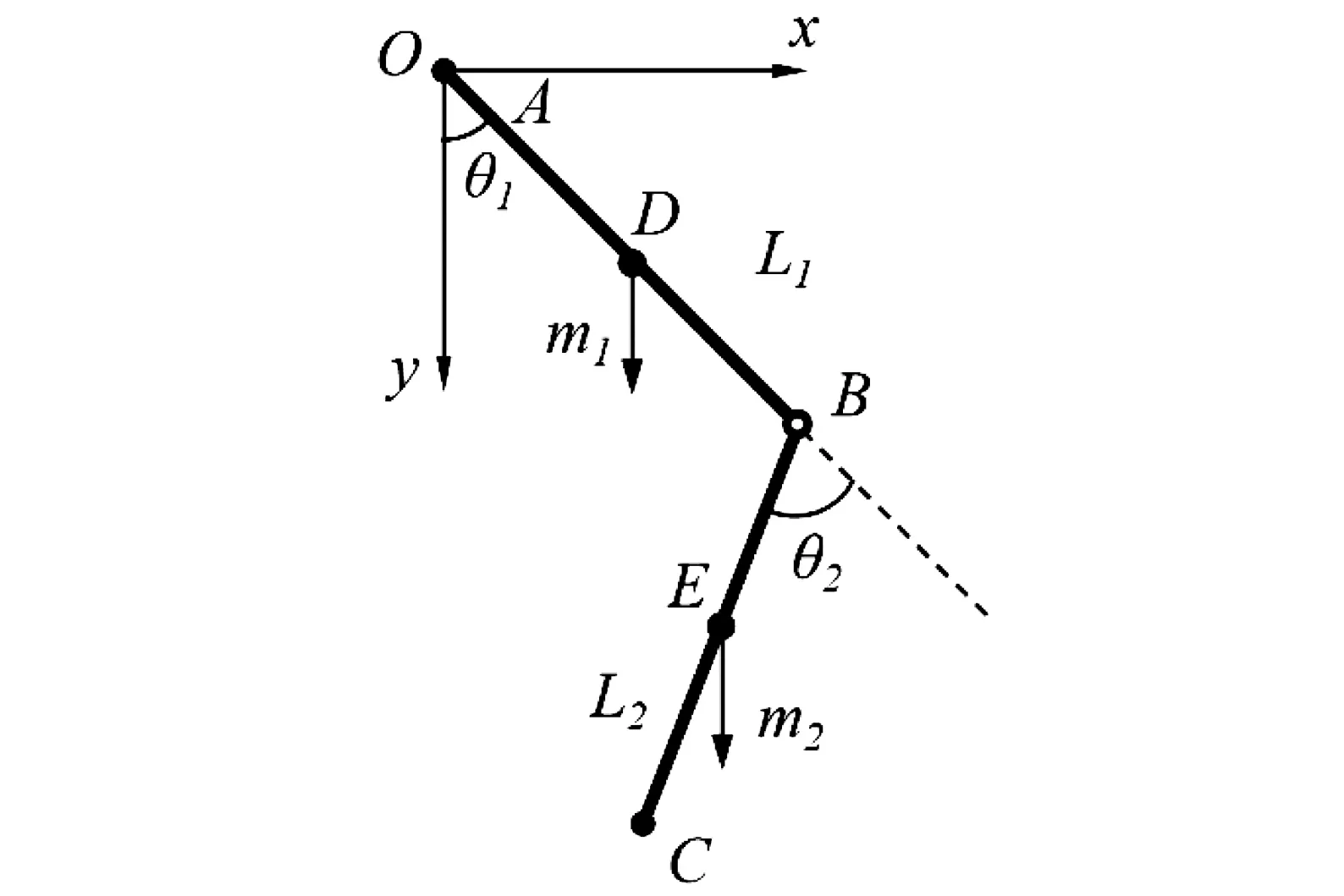
图5 单腿简化模型Fig.5 Single-leg simplified model
采用Lagrange法进行分析.系统动能
系统势能
系统拉格朗日方程
根据系统拉格朗日方程可计算两杆所需驱动力矩:
将驱动力矩Q1和Q2表达为矩阵形式:

(1)
其中:


由式(1)可以计算出下肢外骨骼运动时各驱动器所需的关节力矩,可为下肢外骨骼康复训练系统运动控制奠定理论基础.
3 下肢外骨骼康复训练机器人迭代学习控制器设计
下肢外骨骼康复训练机器人运动控制系统具有非线性、时变且强耦合等特点.在实际应用中,下肢外骨骼康复训练机器人具有重复性动作特征,采集的反馈数据易受到外部干扰影响,难以得到精确的动力学模型.针对这些控制难点,采用迭代学习控制(Iterative Learning Control,简称 ILC)策略对下肢外骨骼康复训练机器人进行运动控制[14].ILC算法不依赖于系统模型的精确度,能够根据上一次的输出误差来调节下一次的控制输入,不断修正,直至能够在系统模型存在误差的情况下实现目标轨迹的无偏跟踪[15-16].该算法适用于类似下肢外骨骼康复训练机器人这种强耦合、重复控制以及数学模型不精确系统的运动控制.
根据式(1)建立的下肢外骨骼动力学模型,其拉格朗日动力学方程可表示为
即
(2)

式(2)的状态方程形式可表示为



下肢外骨骼康复训练机器人做连续重复性运动,系统第k次运行的行走轨迹动态方程可表示为

对于给定的目标控制输入ud(t)和目标状态xd(t),则有
同时使用比例和微分作用,则有

4 控制器仿真与分析
在1个控制周期内(设置为2 s),通过MATLAB对运用迭代学习控制器的下肢外骨骼康复训练机器人运动控制系统进行轨迹跟踪,仿真流程见图6.

图6 迭代学习控制流程Fig.6 Control flow of iterative learning

迭代20次,下肢外骨骼康复训练机器人运动控制系统轨迹跟踪效果见图7.由图7可见:经20次迭代学习后,在1个控制周期内,髋关节和膝关节角度跟踪曲线的输出轨迹与期望轨迹基本重合;经迭代学习控制后两关节角速度跟踪曲线的输出轨迹与期望轨迹基本重合,且轨迹曲线平滑,没有突变.由此表明,下肢外骨骼康复训练机器人运动控制系统能够达到高精度跟踪期望轨迹的目标要求.在实际康复应用中,能够实现患者按照正常人体步态曲线进行康复训练的功能,并且能够避免患者在康复训练过程中因速度突变造成的关节损伤,在提高安全性的同时也增加了患者的舒适感.

图7 期望轨迹与跟踪轨迹Fig.7 Desired trajectory and tracking trajectory
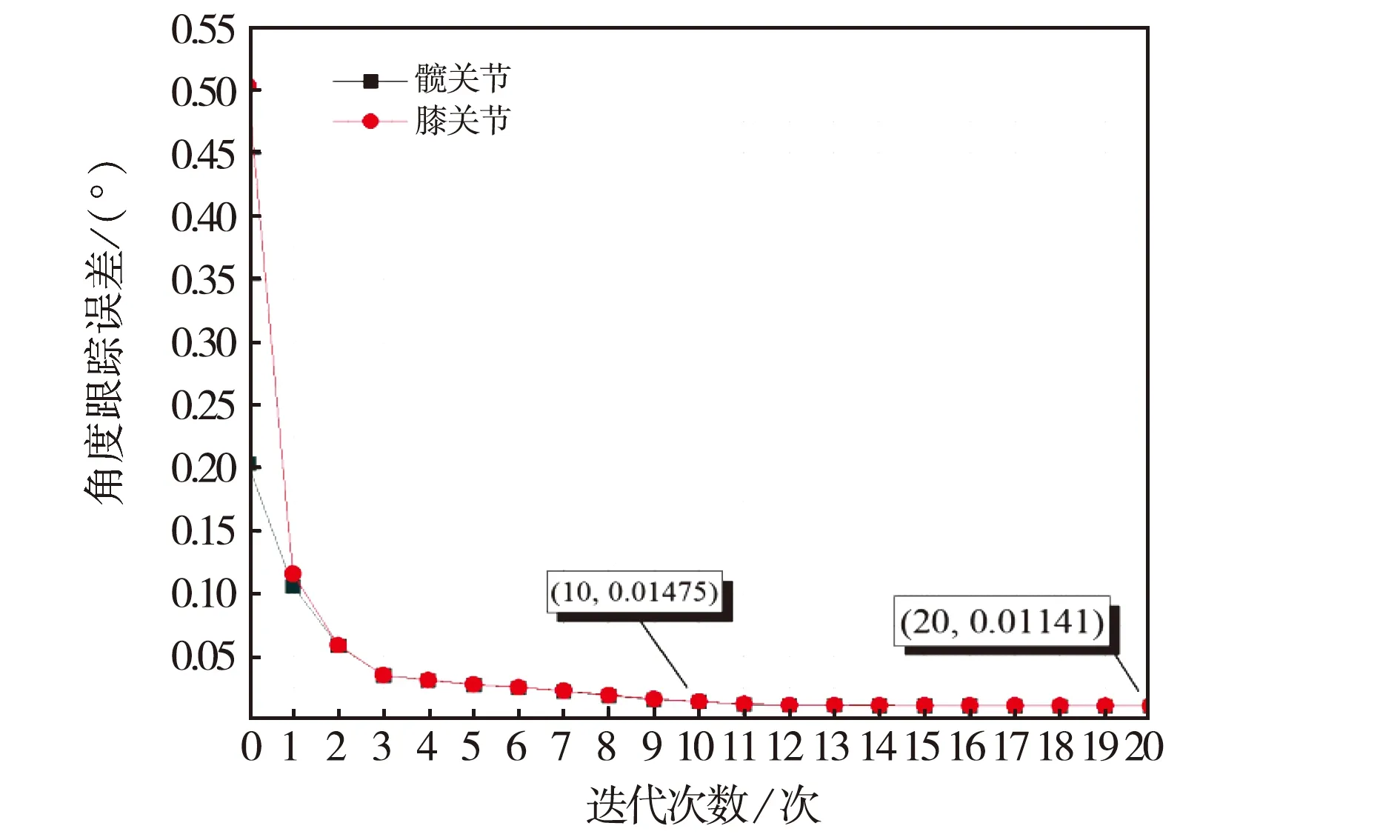
图8 角度跟踪误差Fig.8 Angle tracking error
图8为下肢外骨骼康复训练机器人运动控制系统在20次迭代学习过程中髋关节与膝关节角度跟踪误差的最大绝对值随迭代次数的变化规律.由图8可见:系统轨迹跟踪误差绝对值随迭代次数增加而降低,并趋近0.图中标注的两点(10,0.014 75)、(20,0.011 41)分别为第10次迭代和第20次迭代后对应的两关节角度跟踪误差的最大绝对值.分析可知,系统经20次迭代学习之后,髋关节与膝关节的角度跟踪误差能够控制在-0.011 41°~0.011 41°内,实现系统高精度跟踪期望轨迹的目标.
5 结 论
本文研究了下肢外骨骼康复训练机器人运动控制策略,基于迭代学习原理设计了下肢外骨骼康复训练机器人运动控制器,并在MATLAB中对其轨迹跟踪效果进行仿真研究.结果表明:随着迭代次数的增加,下肢外骨骼康复训练系统在迭代学习控制器作用下,关节角度的轨迹跟踪误差逐渐减少,系统能够达到高精度跟踪期望轨迹的目标要求.后续研究可在设计的迭代学习控制器基础上,进一步考虑人体与下肢外骨骼康复训练机器人系统的耦合性,建立更加贴合下肢运动障碍患者实际需求的数学模型,优化患者与康复训练系统之间的协调性.同时,可以研究患者使用下肢外骨骼康复训练机器人进行主动训练的控制策略,提升患者在康复训练过程中的参与感,达到更好的康复训练效果.
猜你喜欢
保健医苑(2023年2期)2023-03-15
小哥白尼(野生动物)(2021年12期)2021-03-29
装备制造技术(2020年11期)2021-01-26
高师理科学刊(2020年2期)2020-11-26
中华养生保健(2020年2期)2020-11-16
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
制造业自动化(2017年2期)2017-03-20
发明与创新(2015年33期)2015-02-27
发明与创新(2015年25期)2015-02-27