基于柔性铰链的大口径望远镜并联调整机构
2023-03-10 08:18王学问徐振邦韩春杨曹玉岩王建立
光学精密工程 2023年3期
于 阳, 王学问,2, 徐振邦,2*, 韩春杨, 曹玉岩, 王建立,2*
(1.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;2.中国科学院大学,北京 100049)
1 引 言
随着空间遥感技术的迅速发展和空间探测精度的不断提高,大口径高分辨率光学望远镜在民用、军工、商业、天文等领域发挥着重要作用[1]。但望远镜观测姿态的变化会引起结构重力变形,环境温度的变化会引起热变形,从而导致主、次镜之间产生失调误差,极大地降低了望远镜的成像质量。因此,在望远镜跟踪成像过程中,需要对光学系统的失调误差进行主动补偿。原理上,这种失调误差主要是机构的离焦偏差和彗差[2]。假设z轴为光轴方向,离焦偏差可以通过光轴方向的移动来补偿而彗差则需要沿x,y方向移动以及绕x,y方向转动进行补偿。因此,需要在空间5个自由度上进行调整。
Stewart平台由于具有高精度、刚度大、高承载能力、自由度多等优点,目前已广泛应用于地基大型望远镜的主次镜对准和校正[3]。虽然Stewart平台能够解决机构运动自由度和运动精度问题,但大口径地基望远镜在进行天文综合观测的过程中,次镜组件的空间姿态随观测角度的变化而变化,支撑次镜组件的并联调整机构的工作姿态通常为“倒立”或“倾斜”。这种重力变形会影响成像质量。为降低机构的变形量,并联调整机构需具有较高的侧向刚度和轴向刚度。以虎克铰链为代表的传统六自由度并联机构,虽然具有较大的轴向承载能力,但受构型的影响,侧向刚度明显不足。为了提高机构的侧向刚度,通常通过构型优化(设计成“矮”构型)来降低运动机构质心。虽然“矮”构型在侧向刚度上比“高”构型有优势,但在支腿长度和刚度确定的情况下,降低平台质心高度,下平台铰点半径增大,轴向刚度也会有所下降。
柔性铰链具有结构紧凑、无摩擦、无机械间隙、无噪声等特点,被广泛地应用于小角位移、高精度转动的场合中,如精密调整机构、望远镜支撑机构、压电陶瓷驱动器和机器人等领域[4-7]。
大型望远镜并联机构已采用柔性铰链,如The Large Synoptic Survey Telescope (LSST)[8]和暗能量相机(The Dark Energy Camera)[9]的相机组件,均采用柔性铰链Hexapod并联调整机构进行支撑和调整。该机构具有中等运动范围(±21 mm),小角度转动(±1.5°),高分辨率(1 μm)及高重复定位精度(±7.5 μm)。相关文献只测试了机构的性能指标,但没有对引入柔性铰链对机构精度和刚度的影响进行分析。
本文针对柔性铰链对并联机构精度和刚度的影响,以2.5 m大视场光学望远镜为背景,综合考虑精度、刚度、承载能力和结构尺寸等技术要求,研究一种具有高侧向刚度、亚微米精度、大承载能力的柔性铰链并联调整机构。设计了一种两自由度柔性铰链,建立了并联调整机构等效运动学模型和刚度模型,通过动力学软件Adams与有限元分析软件Patran&Nastran搭建刚柔耦合联合仿真系统,分析柔性铰链对精度的影响。最后,通过实验来验证柔性铰链设计的合理性以及运动学建模和刚度建模的准确性。
2 系统组成及柔性铰链设计
基于柔性铰链的并联调整机构如图1所示,该并联调整机构由定平台、动平台、6个传动机构以及12个柔性铰链组成。其中,传动机构采用直流电机驱动谐波减速器旋转,谐波减速器的转动带动与其固连的行星滚柱丝杠螺母转动,螺母的转动带动滚柱丝杠的伸缩和旋转,因此该传动机构是一种无导向滚珠丝杠机构。并联机构实现上平台的六自由度运动需保证每个支链的自由度数≥6。本文设计的并联机构支链,两端柔性铰链各2个自由度,中间无导向滚柱丝杠结构为滚珠丝杠副,等效为2个自由度,但这两个自由度存在耦合关系(即导程),可通过运动学进行位姿解耦。此外,该传动机构有两个编码器,一是位于直流电机后端的增量式编码器,用于电机计数;另一个是固定在丝杠螺母上的绝对式磁栅编码器,用于位置闭环反馈。
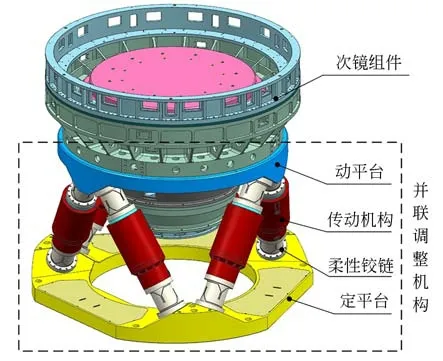
图1 大口径望远镜重载并联平台Fig.1 Heavy-duty parallel platform for large-aperture telescopes
2.5 m望远镜次镜组件对并联调整机构的负载要求是1 200 kg以上,平台转动±1°,平动±8 mm,精度优于±1 μm/±1″,横向刚度大于60 N/μm。为了保证并联机构的大承载能力,传动组件要具有足够大的推力,同时为减小重力变形,机构还要具有较高的刚度,尤其是刚度相对薄弱的环节(即柔性铰链),也应具有较高的轴向刚度。此外,考虑机构高负载、长寿命的使用要求,柔性铰链应具有较低的弯曲刚度。因此,首先对柔性铰链进行设计与建模。
图2为直梁圆角型柔性铰链的几何结构示意图。其几何参数包括端面长度b、最大厚度d、最薄处厚度t,宽度w,圆角半径r,以及直梁圆角总长度l。沿x轴拉伸或压缩柔度与绕z轴旋转的弯曲柔度[10]分别为:
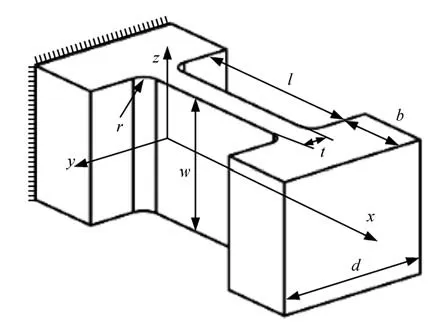
图2 直梁圆角型柔性铰链示意图Fig.2 Schematic diagram of corner-filleted flexure hinge
根据柔度公式,可得出柔性铰链的刚度公式为:
其中:Kt为拉伸或压缩刚度,Kb为转动刚度。
直梁圆角型柔性铰链具有一个转动自由度。为满足并联机构铰链两自由度的需求,将柔性铰链设计成垂直交叉轴形式,如图3所示。该柔性铰链的最大转动角度小于2.5°,通过对限位槽的设计,来保证机构在极限转角位置不产生塑性变形或断裂。通过有限元分析,小角度柔性铰链的旋转中心基本不变。因此,小角度转动的两自由度柔性铰链可以等效为图3(b)所示的传统万向铰链,等效旋转中心为o。
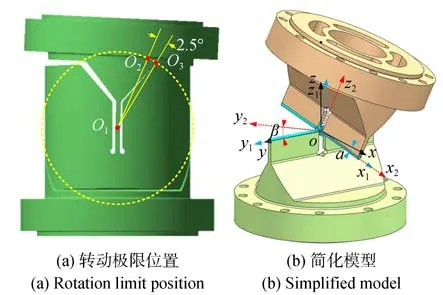
图3 两自由度柔性铰链示意图Fig.3 Schematic diagram of 2-DOF flexible hinge
为了确定柔性铰链的转动刚度,采用集总参数的分析方法,Kφx,Mx为柔性铰链绕x轴的转动刚度,Kφy,My为 绕y轴 的 转 动 刚 度,则 等 效 转 动 刚度为:
铰链材料选用沉淀硬化性不锈钢17-4PH,泊松比为v,其材料性能与结构参数如表1中所示。根据式(5),铰链的转动刚度为1.159×106N·mm·rad-1。
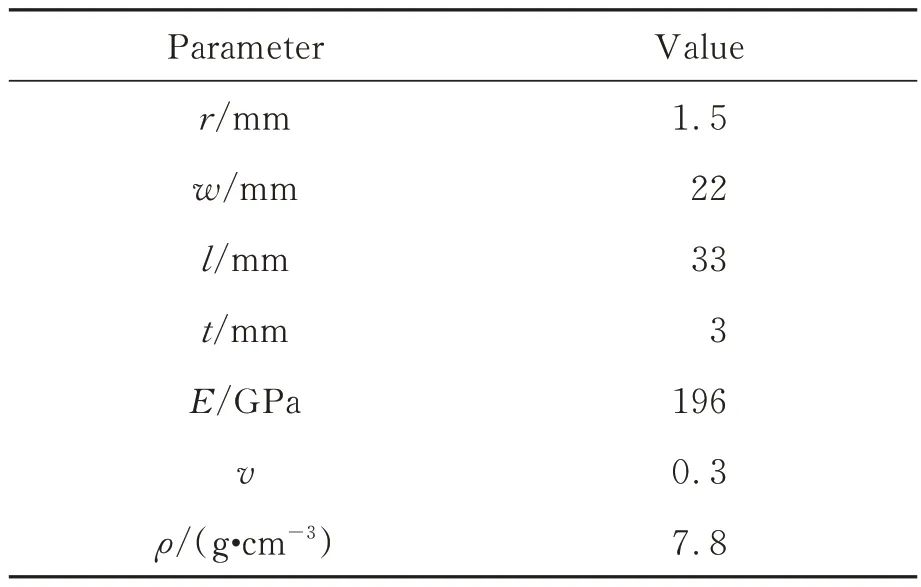
表1 柔性铰链参数Tab.1 Parameters of flexible hinge
3 运动学建模
由于小角度转动的柔性铰链转动中心不变,柔性铰链的转动可以等效为万向铰链的运动,因此并联调整机构的等效运动学构型如图4所示。建立定坐标系B-OXYZ与动坐标系P-OXYZ,其中动定坐标系分别固定在上下平台中心处,动坐标系随上平台运动。动坐标相对于定坐标系的位姿关系为q=[xyzαβγ]T,上、下平台各铰链用Pi,Bi(i=1~6)表示,上、下平台铰点圆半径为RP,RB,铰点P1与P6,B1与B6的圆心角分别为θP和θB。支腿的闭环矢量方程表示为:
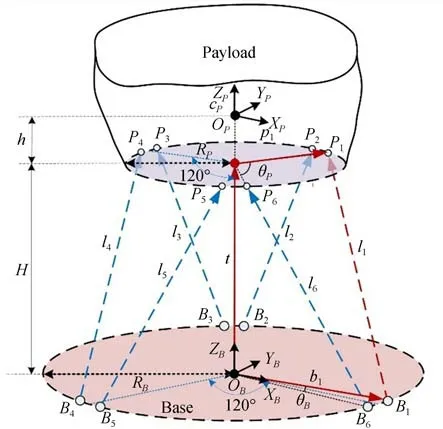
图4 重载并联平台构型Fig.4 Configuration of heavy-duty parallel platforms
其中:Blni为杆在定坐标系中的单位矢量;li为杆长(i=1,…6)。坐标变换矩阵为:
其中ω为动平台角速度矢量。
进而有:
根据上平台的受力关系及虚功原理,当各支链刚度均为k时,并联机构的刚度矩阵K可表示为:
由于本文研究的并联机构采用无导向滚柱丝杠的结构形式,滚柱丝杠副中的转动副和移动副并不是相互独立的,螺母每旋转一圈,丝杠就移动一个导程,即滚柱丝杠副的运动是耦合的,这种耦合会产生一种衍生运动,使动平台产生位姿偏差。因此,该运动中每个支链存在两个串联的螺旋运动,一是伺服电机驱动丝杠的主动螺旋运动,另一个是由于支链沿轴向相对转动而引起的被动螺旋运动。支链的实际伸长量可以表示为:
其中:Δli1为主动螺旋运动引起的伸长量;Δli2为被动螺旋运动引起的伸长量。衍生运动的具体求解可参考文献[12]。
4 仿真及实验
为了验证柔性铰链的转动刚度和运动学建模的正确性,进行了针对性的仿真分析与实验验证。
4.1 柔性铰链仿真分析
用UG软件对柔性铰链进行三维建模,使用Patran/Nastran软件划分网格,铰链的一端施加固定约束,另一端施加1×105N·mm的弯矩,有限元分析结果如图5(a)所示。其转动角度为8.57×10-2rad,折算成转动刚度为1.167×106N·mm·rad-1,理论值与有限元分析结果的相对误差为0.69%。铰链的一端施加固定约束,另一端施加1×104N的轴向力,有限元结果如图5(b)所示,折算成轴向刚度约为321.5 N/μm。
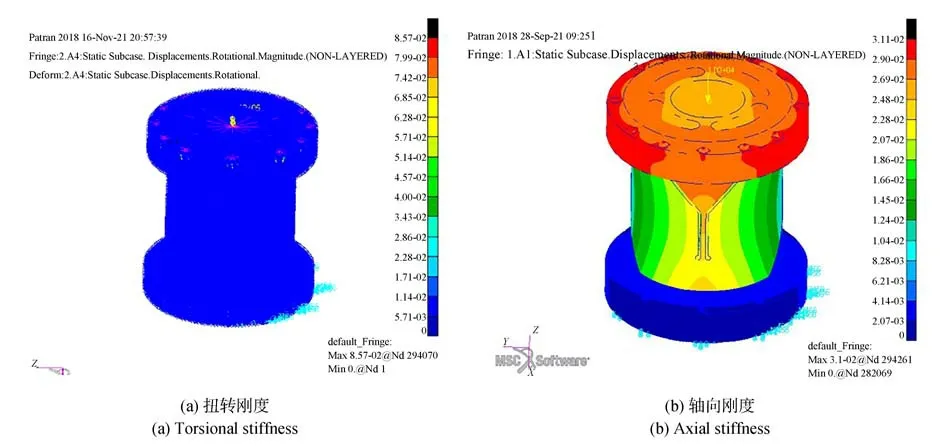
图5 柔性铰链的有限元模型Fig.5 Finite element model of flexible hinge
4.2 刚柔耦合联合仿真
本文设计的并联调整机构是由刚性单元(传动机构)和柔性单元(柔性铰链)构成的,需要进行刚柔耦合运动学仿真来验证运动学模型的准确性。并联机构的构型参数如表2所示。
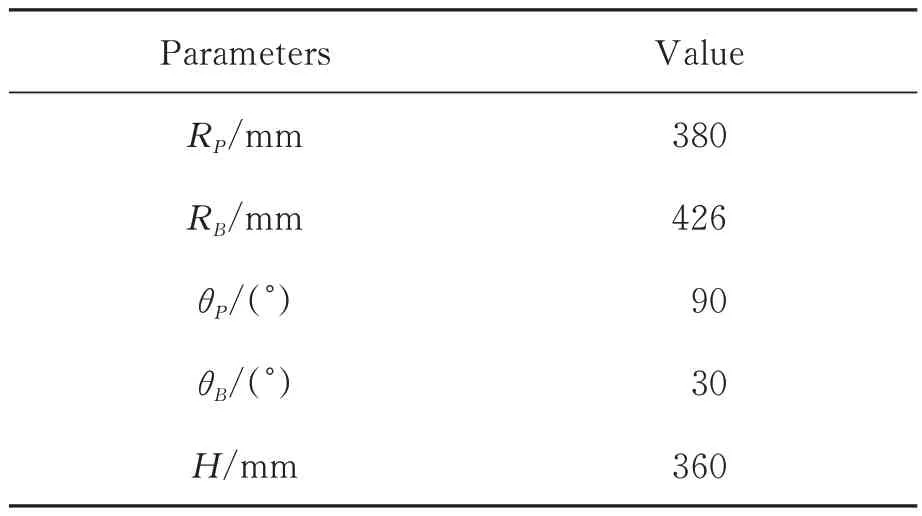
表2 运动学构型参数Tab.2 Kinematic configuration parameters
利用Patran/Nastran软件对柔性铰链进行模态分析,提取10阶模态信息,创建接口并导出MNF模态中性文件。将并联调整机构模型导入动力学仿真软件ADAMS中,将装配体中的柔性铰链替换为MNF模态中性文件,建立各个关节的运动副关系,进而搭建刚柔耦合联合仿真系统,如图6所示。
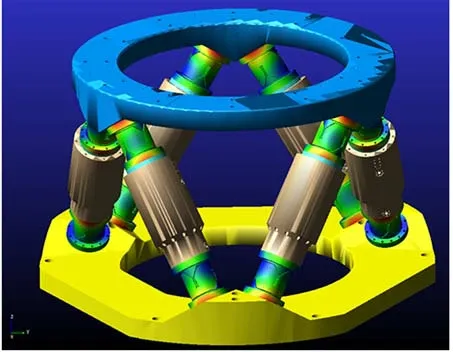
图6 刚柔耦合仿真模型Fig.6 Rigid-flexible coupling simulation model
在刚柔耦合模型中,对Z轴的负方向施加重力场,机构动平台沿X,Y,Z轴的移动范围为-8~8 mm,转动范围为-1°~1°。为了证明运动学理论模型的正确性,在工作空间内选取6个方向的单方向运动进行仿真验证。单方向运动分别为[x0 0 0 0 0], [0y0 0 0 0], [0 0z0 0 0], [0 0 0α0 0], [0 0 0 0β0]和[0 0 0 0 0γ]。通过给定平台的位姿来确定各个支腿的输入长度。然后,使用支腿的输入长度L进行刚柔耦合联合仿真。最后,将仿真得到的上平台位姿与q0比较。仿真结果如图7~图8所示。
从图7可以看出,仿真结果与理论结果的偏差在微米量级,具有较好的一致性。由图8可知,动平台在±8 mm平移运动时,位置最大偏置为4.501 μm,±1°转 角 运 动 的 最 大 姿 态 偏 差 为1.223″。仿真结果表明,在小行程范围内运动时,运动偏差相对较小,但随着运动范围的增大,机构的运动偏差也不断增大。仿真结果证明了柔性铰链并联机构在小角度范围内运动的准确性和有效性。
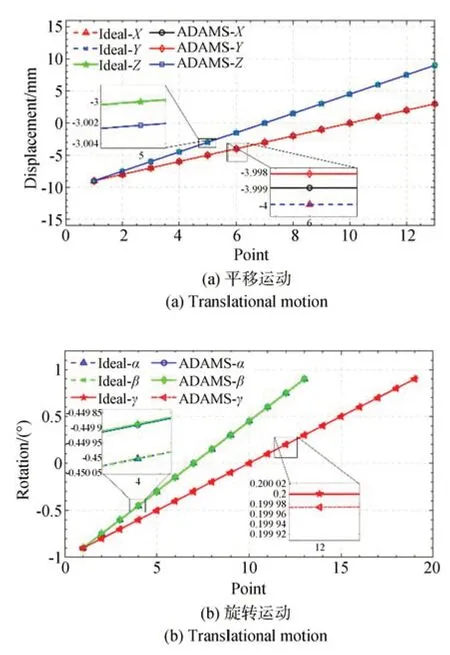
图7 刚柔耦合位姿Fig.7 Rigid-flexible coupling postures

图8 位姿误差Fig.8 Schematic diagram of posture errors
4.3 实验验证
4.3.1 柔性铰链转动刚度测试
为验证柔性铰链的性能,搭建了刚度测试系统,其原理如图9所示。测试装置包括高精度光栅尺、转接工装、柔性铰链、转接板以及质量块。质量块施加一个向下的力,利用光栅尺测量垂直位移Δz。其中,光栅尺的测量点与铰链中心距离L1,质量块施加力mg的点与铰链中心距离L2。此时铰链转动角度θ近似为:
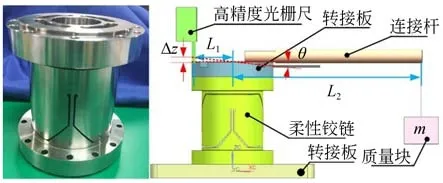
图9 柔性铰链实物和刚度检测原理Fig.9 Photo of real flexible hinge and principle for stiff⁃ness measurement
式中L1=58 mm。
柔性铰链的转动刚度为:
式中L2=278 mm。
实验系统如图10所示。将质量块进行搭配得到958,1 900,2 858,3 800,4 758,5 700,6 658,7 600,8 558 g。多次重复测量不同质量下柔性铰链的垂直位移Δz,根据式(13)和式(14)得到弯矩与转角实验数据。数据拟合曲线的斜率就是柔性铰链的转动刚度。
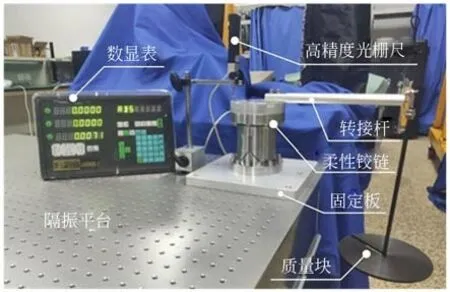
图10 刚度测试装置Fig.10 Stiffness testing devices
柔性铰链绕X轴与Y轴的旋转角度α与β的数据以及拟合曲线如图11所示。绕x轴的转动刚度为:
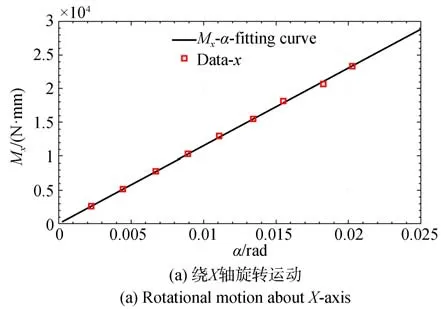
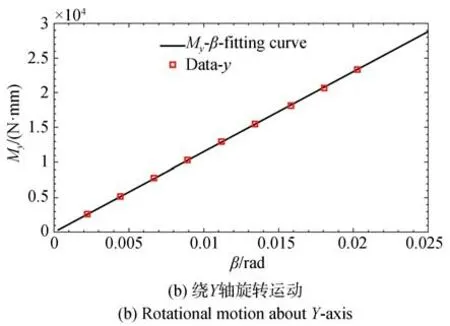
图11 力矩-角位移拟合曲线Fig.11 Fitting curves of moment and rotating angle
对比实验结果与理论计算结果可以得出,绕X,Y轴的转动刚度相对误差分别为2.93%,3.54%,验证了柔性铰链理论推导及设计的合理性。
4.3.2 分辨率测试
为了验证并联调整机构运动学建模的准确性,搭建了重建平台实验测试系统。如图12所示,负载为1 200 kg的光学组件,采用激光位移传感器(分辨率为0.1 μm,测量范围为2 mm)测量平台的分辨率(小位移运动)和定位精度(大位移运动)。其中,分辨率为0.5 μm的最小机械步距。分辨率测试结果如图13所示。
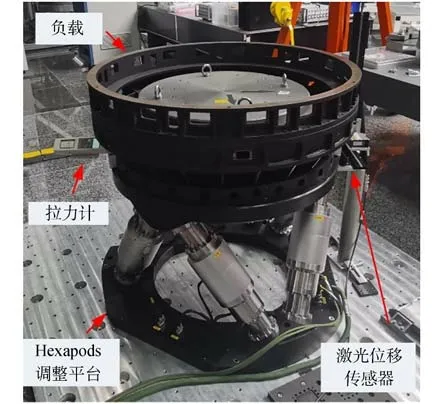
图12 重载平台测试系统Fig.12 Photo of heavy-duty platform test system
从图13可以看出,并联调整机构在X,Y,Z轴方向上0.5 μm步距的平动和0.5″步距的转动能够清晰辨识且具有很好的均匀性。移动分辨率和转动分辨率通过数据统计得到。对比刚柔耦合仿真数据,平动和转动分辨率的测试,可以证明机构在小位移(微米/角秒量级)运动中运动学建模方法的准确性。
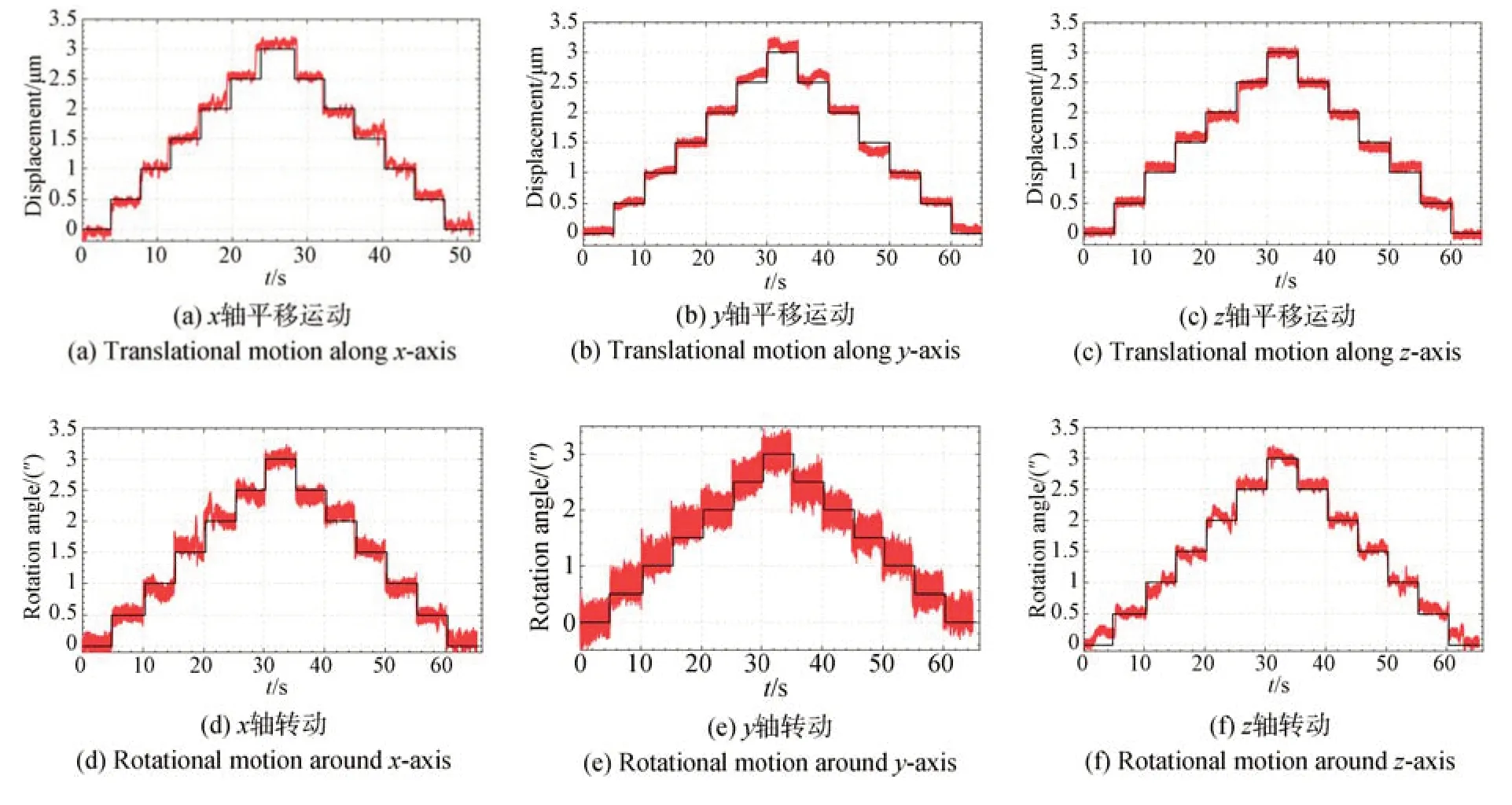
图13 分辨率测试结果Fig.13 Resolution test results
4.3.3 定位精度测试
为验证刚柔耦合仿真模型在大位移范围的准确性,对调整机构的定位精度进行测试,定位精度反应系统误差和随机误差对机构的影响,机构动平台沿X,Y,Z轴的移动范围为-8~8 mm,转动范围为-1°~1°,测试结果如图14所示。测试结果表明,随着位移的增大,位置误差不断增大,行程内不超过±5 μm,角度范围内,误差不超过±1.2″,与仿真结果趋势一致。
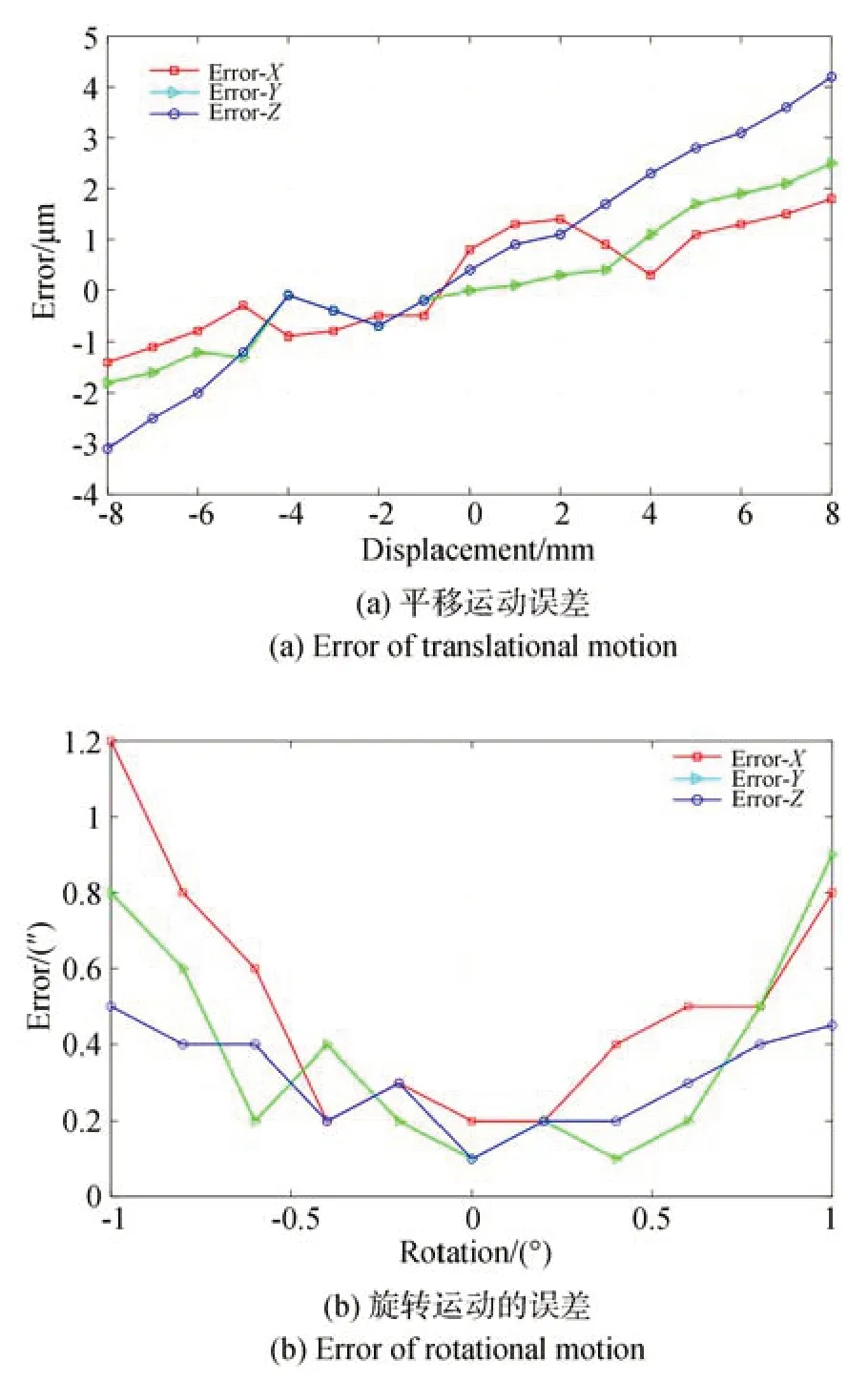
图14 定位精度测试结果Fig.14 Test results of positioning accuracy
4.3.4 侧向刚度测试
并联平台的刚度是机构抵抗重力变形和承载能力的重要指标。为降低2.5米地基望远镜在光学追踪过程中重力变形对成像质量的影响,次镜组件并联调整机构的侧向刚度应大于60 N/μm。因此,对并联调整机构进行侧向测试。沿动平台的x和y向施加拉力,使用激光位移传感器来实时获取该方向的位移量。然后,对不同作用力下动平台的位移量进行曲线拟合,所得到的曲线斜率就是机构的侧向刚度。测试结果如图15所示,并联机构的X和Y向侧向刚度分别为98.75 N/μm和98.27 N/μm,能够满足技术指标的要求。
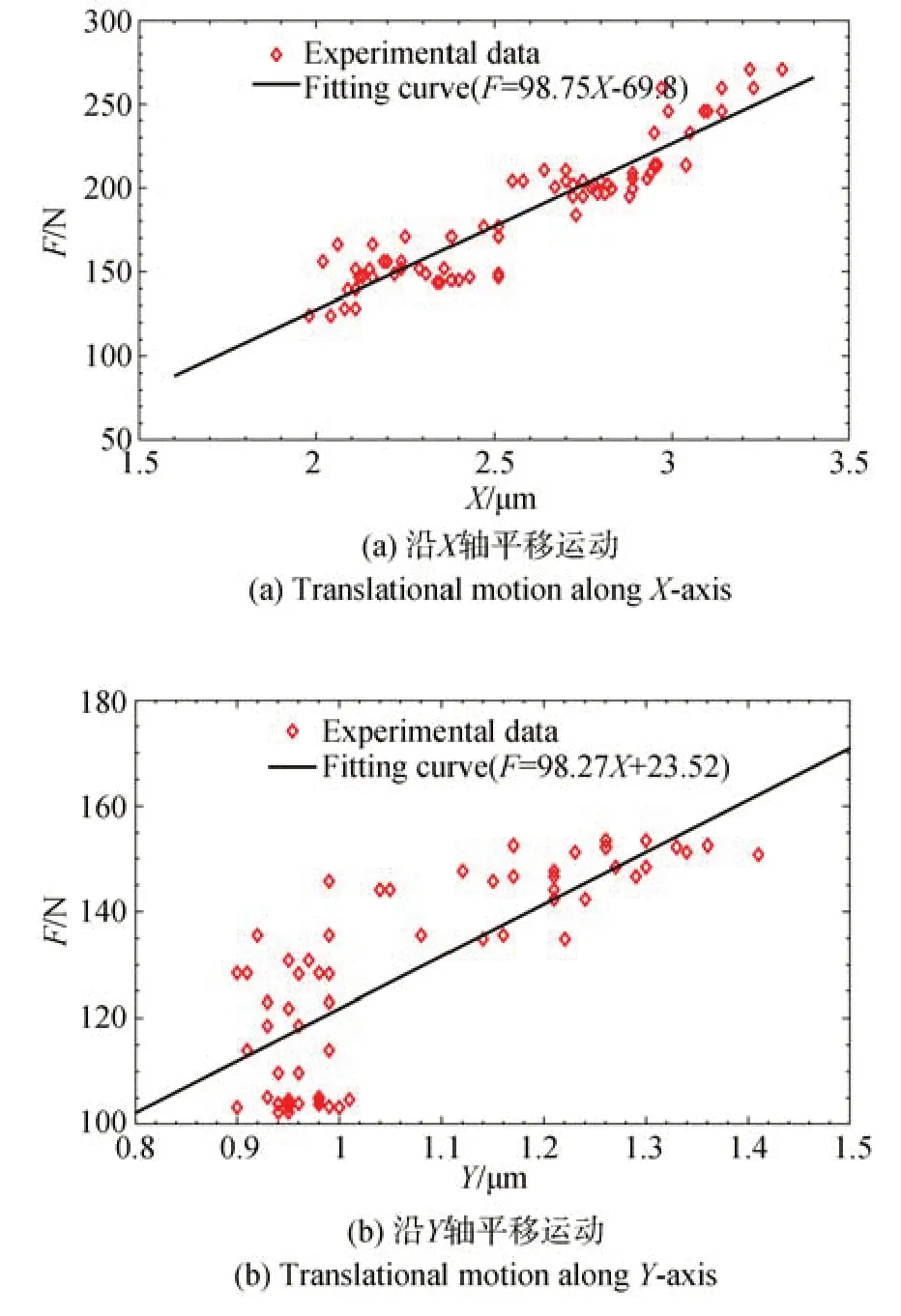
图15 刚度测试结果Fig.15 Stiffness test results
5 结 论
针对地基望远镜中重力载荷的变化对光学成像质量影响的问题,本文开展了基于柔性铰链的并联调整机构研究。根据技术要求设计了一种两自由度柔性铰链,推导出转动刚度的计算公式并确定柔性铰链的等效旋转中心。接着,建立了并联机构的等效运动学模型和刚度模型。然后,通过有限元仿真验证了柔性铰链的转动刚度,并利用刚柔耦合联合仿真系统验证了等效运动学建模的准确性。仿真结果表明,柔性铰链转动刚度的理论值与有限元分析结果的相对误差为0.69%,柔性铰链并联机构在小行程/小角度范围内运动时,运动偏差在亚微米/角秒量级,而随着运动范围的增大,机构运动偏差也随之增大;最后,搭建了分辨率、精度和刚度测试系统。实验结果证明了机构在小行程(微米/角秒量级)和大行程(毫米/度)运动范围内运动学建模方法的准确性,横向刚度优于60 N/μm,能够满足预期使用要求。
猜你喜欢
河北省科学院学报(2020年1期)2020-05-25
制造技术与机床(2019年11期)2019-12-04
重型机械(2019年3期)2019-08-27
民用飞机设计与研究(2019年2期)2019-08-05
北京汽车(2019年6期)2019-02-12
制造技术与机床(2019年1期)2019-01-14
制造技术与机床(2018年11期)2018-11-23
汽车电器(2018年10期)2018-11-01
制造技术与机床(2017年8期)2017-11-27
通信电源技术(2016年1期)2016-04-16