基于小波变换的精密测量点云多尺度分解
2023-03-10 08:18高凯元崔海华李鹏程刘晓旭
光学精密工程 2023年3期
高凯元, 刘 雷, 崔海华*, 李鹏程, 刘晓旭, 刘 林
(1.南京航空航天大学 机电学院,江苏 南京 210016;2.北京航天计量测试技术研究所,北京 100076)
1 引 言
航空、航天,以及大型科学装置等国家重大工程的建设与发展[1],对零件提出了一系列新的性能要求,随着制造业的不断发展,大量零部件具有功能表面的特性,即同时具有宏观尺度特征与微观尺度特征。以航空发动机叶片为例,叶片的整体几何精度直接影响整体的空气动力学特性,表面的气膜孔一般在0.25~0.5 mm,其几何结构(包括孔间距、孔径)直接影响承温能力[2],这种多尺度零件的检测要求更高。大量研究表明,通过多传感组合的检测方式,充分发挥每个检测设备的优势,最终将多传感数据进行配准融合,得到完整的数据集,从而满足多尺度检测的要求[3-5]。
由于不同检测设备所获取的数据存在尺度和数据量的差异,多尺度点云数据存在配准融合困难、精度低等问题。为了解决上述问题,对高分辨率、细节丰富的小尺度数据进行多尺度分解是一种有效的方法[6],从小尺度数据中获取大尺度数据的近似数据,以此作为配准的依据,最后将求解的关系应用于原始的点云数据,由此可见,数据的尺度分解是很重要的一步。为了解决跨尺度数据的差异,传统的点云简化方式包括随机采样法、体素网格采样法、单一曲率采样法、一致性采样,以及改进的点云数据特征约束简化算法[7-9]。然而,这类简化方法并没有考虑到测量过程中尺度的影响,只是降低了点云数据量。牛血娟[10],莫程威等提出了基于二维离散小波变换的多尺度分解方法,二维小波多尺度分解主要用于图像和深度图中,但是二维小波变换应用到散乱点云上,需要对点云进行投影,因此对点云的全局形状有一定的要求,投影后不能重叠。Julie等提出尺度空间算法[11],通过设置不同的迭代次数将点云数据进行平滑,分离出不同尺度信息的点云数据,但是该算法仅仅考虑了尺度,没有考虑点云的数据量。汪千金等提出了基于尺度空间的点云下采样方法[12],先通过平均曲率运动对点云整体进行平滑处理,然后再进行体素降采样,但是此方法中平滑处理比较耗时。
针对现有方法存在的问题,本文提出一种基于三维小波的点云数据多尺度分解方法,实现小尺度点云数据的多尺度分解,并通过对尺度变化敏感的分形面维数和体维数表征与原始点云数据的相似程度。以某航空发动机叶片上气膜孔为检测对象,对显微测量方式获取的气膜孔数据进行多尺度分解,获得较好的分解效果。最后以分解的近似尺度数据与原始大尺度结构光测量点云进行配准[13],并将变换关系应用于原始点云,实现了跨尺度点云的高准确度配准。
2 多尺度分解建模
2.1 离散点云栅格建模
在光学三维数字化测量领域中,尺度一般是指分辨率或者像元,即某种测量设备或者测量方法能够检测到的最小形貌的信息量。如图1所示,O1与O2分别代表小尺度检测设备与大尺度检测设备,检测数据具有尺度与数据量的差异。分辨率不同,所测得的数据包含的信息量也不同,分辨率变高时,数据包含的高频成分越多,即细节更丰富,尺度越小;反之,数据包含的高频信息越少,即轮廓越平滑,尺度越大。小尺度数据中包含对应部位的大尺度数据信息,因此可以对跨尺度测量中的小尺数据进行多尺度分解,从而逼近大尺度的对应位置数据。
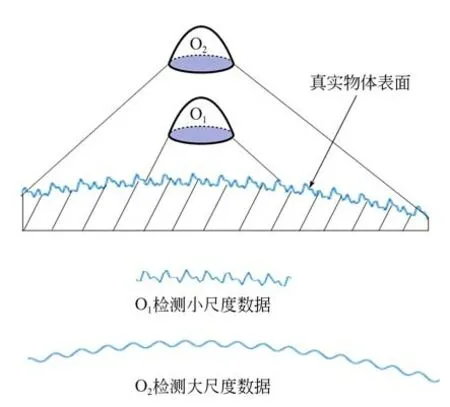
图1 多尺度三维测量原理Fig.1 Schematic diagram of multi-scale 3D measure⁃ments
由于三维离散点云无序的特性,点与点之间的拓扑关系不明确,无法像二维图像那样写出以具体空间相对位置为自变量的全局函数,通过体素栅格建模,建立无序离散点云的全局表达函数。栅格建模分为两步:第一步,通过手动交互的方式删除不必要的点,然后对整体点云进行主成分分析(Principle Component Analysis, PCA),建立最小矩形包围盒,并变换整体点云的主方向与坐标轴重合;第二步,计算每个点与点之间的最小距离s,作为体素的边长,将最小的矩形包围盒变成以体素边长为单位进行划分,保证每个体素内只有一个点,建立栅格模型与离散点云之间一一对应的可逆关系,即:
其 中:points[i].x,points[i].y,points[i].z分别表示经过变换后位于最小包围盒中第i个点的坐标,s为栅格边长,xmin,ymin,zmin表示最小包围盒顶点的最小坐标,作为栅格的顶点,[]表示向下取整,X,Y,Z表示对应点在栅格中的坐标。
通过栅格模型来间接表达整片点云,整片点云的三元二值函数表达式如下:
其中:k为分解次数,A为定值,Fk(X,Y,Z)为点云的全局表达函数,函数值为对应栅格中的值。
2.2 小波变换多尺度分解理论
本文分析的目标是离散点云,是三维数据的一种具体表达形式,可将它看作是一种能量有限、并且频段有限的离散信号,即点云全局表达函数具有能量有限的特性。基于小波理论进行多尺度分解,大小尺度点云由于数据量和精度的差异,数据包含的细节丰富程度不一样,小尺度数据具有更多的高频信息。为了实现跨尺度点云的精确配准,最核心的问题就是解决尺度之间的差异,需要对小尺度数据进行低通滤波,并通过降采样减小两片点云之间的数据量差异,即同时实现滤波和降采样。
由一维连续小波变换的定义有:
其中:a,b∈R,通过伸缩和平移尺度函数实现对局部数据的提取与分析。根据香农采样定理与奈奎斯特率对数据进行二进离散采样,取a=2j,b=2jk,k∈Z,j∈N,即形成离散小波变换,形式如下:
根据Mallet算法,利用小波具有低通和带通的特性,将一个能量有限函数f(t)∈L2(R)拆成尺度函数与小波函数的线性组合,即低频函数与高频函数的线性组合。以小波函数作为滤波函数,对低频信息进行逐级分解,将原始信号空间分解成多个互相正交的子空间,分解形式如下:
式中:Vj表示第j级低频信息空间,Wj表示第j级高频信息空间,分解空间示意图如图2所示。

图2 多级小波分解空间Fig.2 Multilevel wavelet decomposition space
将一维、二维小波变换推广到三维,首先选取合适的小波基,即确定合适的尺度函数φ(x,y,z)和小波函数ψ(x,y,z),三维尺度函数和小波函数均可由3个一维尺度函数与小波函数扩展而来。其中,尺度函数表示为:
离散小波变换的低频尺度函数离散形式如下:
其中:M,N,K分别为x,y,z方向上离散点的行数、列数与页数,j0为任意尺度,Wφ(j0,m,n,k)为在尺度j0上的近似。
获取整片三维栅格点云表达函数的近似表达,将式(8)计算转化成3D卷积运算,其中卷积核是通过一维离散小波尺度函数系数张量运算而成,如图3所示。
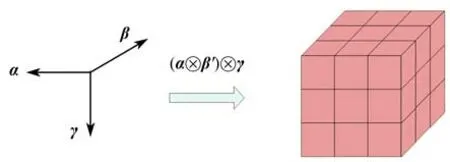
图3 卷积核Fig.3 Convolutional nuclei
多尺度分解流程如图4所示,主要分为两步,首先将卷积核按行、列、页滑过整个栅格点云函数,实现整体数据平滑;然后,由于采用的小波属于二进小波,对整个栅格进行等间隔采样,取出偶数行、偶数列、偶数页,此时栅格整体尺寸变成原来的八分之一,变换到下一个尺度空间。在数据量满足小波分析的条件下,重复以上两个步骤即可实现整个栅格的多尺度分解。
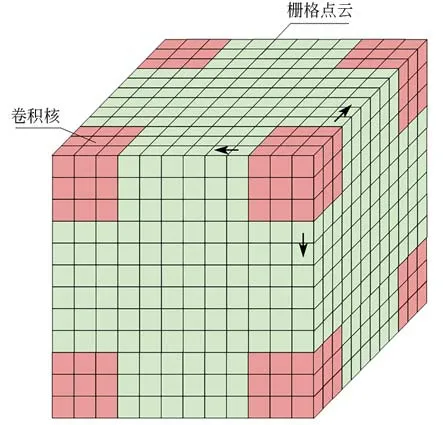
图4 栅格卷积Fig.4 Grid convolution
2.3 点云多尺度近似体生成
基于分形理论的相似维数的思想,多尺度分解后的点云对整个栅格空间的占用率应保持不变,因此经过一次采样后,点云数据量应变成上一次分解点云数据量的八分之一左右。经过小波核卷积和采样后每个体素记录的值已经不是原来的值,即已经不是一个3D的二值图像,因此需要对小波变换后的3D图像进行二值化,才能根据栅格中的值确定是否应该保留该栅格中的点。由于卷积运算实现的是低通滤波,滤除高频,因此滤波后的数据在未进行平滑前的值周围波动。以最初给定的值为中心,并设定偏离中心距离θth来确定阈值范围,最终数据量的递推关系如下:
其中:k是分解的次数,Fw k-1表示经过k-1次小波核卷积并下采样后的栅格表达函数,θth为二值化的阈值。当满足式(9)的非零栅格数量大致为原始点云数量的(18)k时,即可确定阈值θth。
具体的二值化步骤如下:
(1) 统计整个栅格中数据偏离定值A的最小距离dmin和最大距离dmax。
(2) 从最小距离以一定的步长进行迭代,直到满足式(9)的栅格数目近似等于原始点云数量的(18)k,确定阈值,并将新的阈值带入式(9),重新遍历整个栅格,满足式(9)的置为A,其余置为0。
经过3D图像的二值化,栅格模型满足点云的全局表达函数,由于栅格模型与点云存在一一对应关系,因此可以通过式(10)求解点云的实际坐标,从而获得原始点云的近似体,即:
2.4 近似体的相似度表征
在点云数据处理中,点云数据形状表达是很重要的一步,比如点云特征点的提取、点云数据集的相似度等领域中都需要对点云的全局或者局部形状进行表达。传统的点云表达方式主要有直方图统计法、变换法等,但是这些方法对于形状的尺度变化不敏感。在分形几何中对于点云形状的表达主要有差分盒子维、多尺度分数维等[14-16],但是两片点云的相似性可以通过相似维数进行评判,主要有面相似维数和体相似维数两种[17],定义如下:
其中:R代表整片点云的最小包围球半径,SR代表整片点云经过三角化后的表面积[18-19],VR代表整片三维Delaunay三角剖分后的体积[20];DfS代表面形状相似参量,即面相关维数,简称面维数;DfV代表体相似参量,即体相关维数,简称体维数。求出原始点云两种相似维数与每次分解采样后的两种相似维数,通过两种相似维数的差异判定数据的相似程度。
3 实验与结果分析
3.1 多尺度数据获取实验
以某具有多尺度特征的航空发动机叶片为实验对象,图5(a)为叶片实物,需要检测整体叶形以及表面微小的气膜孔,叶片整体长度大约为85 mm,所测气膜孔的直径大约为1.1 mm。单一的检测设备无法满足多尺度检测,用面结构光方式测量整体叶形,显微测量方式测量气膜孔,最终将两种设备的数据进行配准融合,得到完整的数据集。图5(b)是显微测量方式得到的微观形貌数据,测量视场为1.5 mm×2 mm,分辨率为0.001 5 mm,显微测量数据有1 073 591个点。图5(c)是结构光测量方式得到的宏观型面数据,分辨率为0.09 mm,其中对应气膜孔测量部位的结构光数据大约有1 300个。两种设备在尺度与分辨率上存在很大差异,导致特征点提取困难与配准精度低等问题,因此需要对小尺度数据进行多尺度分解,获取近似尺度的数据作为与结构光数据配准的依据。
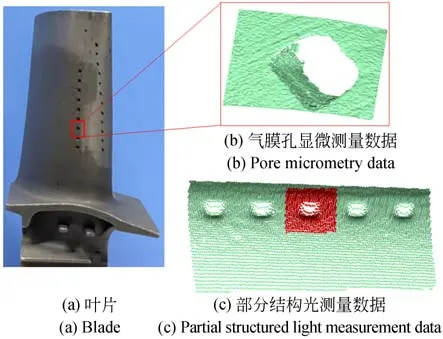
图5 叶片宏微组合式测量结果Fig.5 Macro-micro combined measurement results of blade
3.2 多尺度分解实验
由于分解采样过程中不涉及点云的坐标变换,可直接与原始点云比对,计算均方误差,分析采样特点。计算每一次分解采样结果的面维数与体维数,并与原始点云的体维数与面维数进行比较,用于表征与原始点云的相似性。
以气膜孔的显微测量数据为实验对象,用db4小波,采用补零延拓方式进行基于三维小波的多尺度分解,获取多尺度近似体,分解结果如图6所示,均方差、面维数与体维数的计算结果如表1所示。
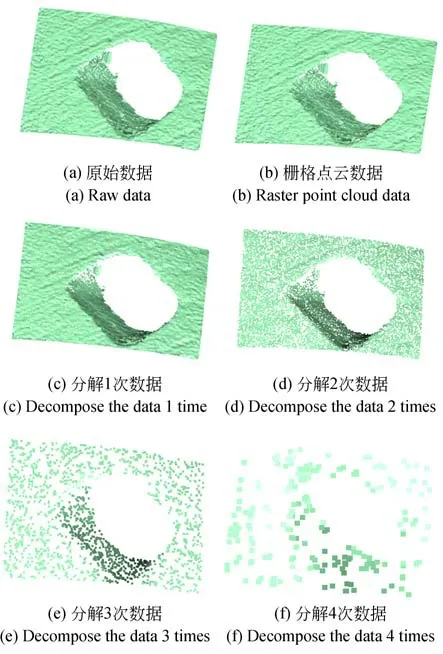
图6 小波方法的分解结果Fig.6 Decomposition results of wavelet method
基于表1的统计结果,根据小波分解采样的特征,点数都大约等于上一次采样点数的八分之一。由于小波分解采样同时考虑了尺度和数据量的影响,分为滤波平滑与间隔采样两步完成,所以均方差逐步增大。根据每次分解采样结果的面维数与体维数与原始点云的面、体维数的差异,可知随着分解次数的增加,面、体维数的差异越来越大。分解采样到第4次,均方差、面维数差与体维数差相比前面的分解结果急剧增大,面维数差占原始面维数的18.2%,体维数差占原始体维数的75.6%,即发生突变,第四次分解时原始数据信息被过度滤除。

表1 小波方法分解结果统计Tab.1 Statistic of wavelet method decomposition results
为了与小波分解结果进行对比,采用随机采样分解、曲率采样分解与文献[12]中方法进行分解,采样分3次进行,并且每次采样的点数是上一次采样结果的八分之一,采样结果分别如图7~图9所示,采样参数的计算结果分别如表2~表4所示。
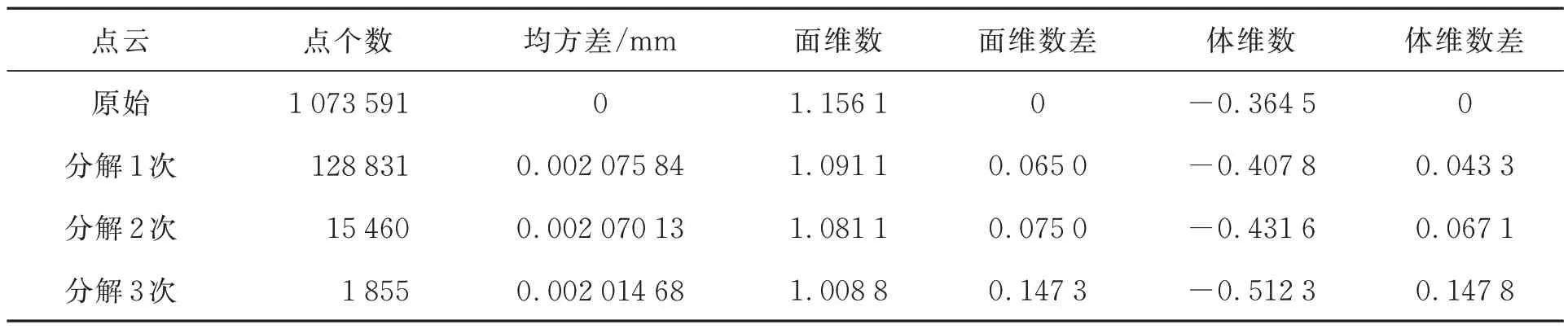
表4 尺度空间分解结果统计Tab.4 Statistics of scale spatial decomposition results

图7 随机采样方法的分解结果Fig.7 Decomposation results of random sampling method

图9 尺度空间分解方法的分解结果Fig.9 Results of scale spatial decomposition method
根据表2的统计结果,点数都大约等于上一次采样点数的八分之一。由于随机采样只考虑数据量的影响,只是在原始数据上进行采样,所以均方差都为0。根据各次分解采样结果的面维数与体维数与原始点云的面、体维数的差异,随着分解次数的增加,面维数差、体维数差越来越大。
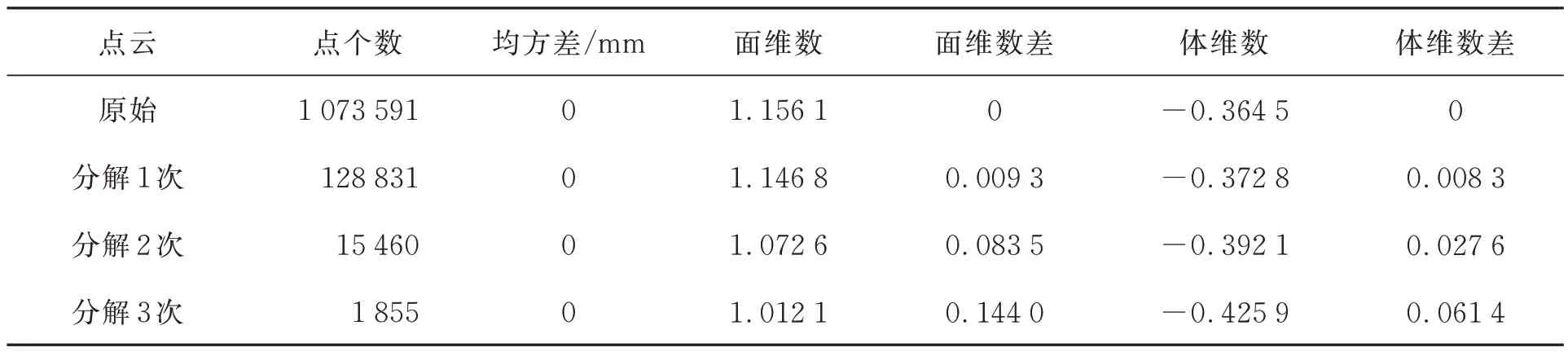
表2 随机采样分解结果统计Tab.2 Statistics of random sampling decomposition results
由表3的统计结果可知,点数都大约等于上一次采样点数的八分之一。由于曲率采样只考虑数据量的影响,只是在原始数据上进行采样,所以均方差都为0。根据各次分解采样结果的面维数与体维数与原始点云的面、体维数的差异,随着分解次数的增加,面维数差、体维数差越来越大。
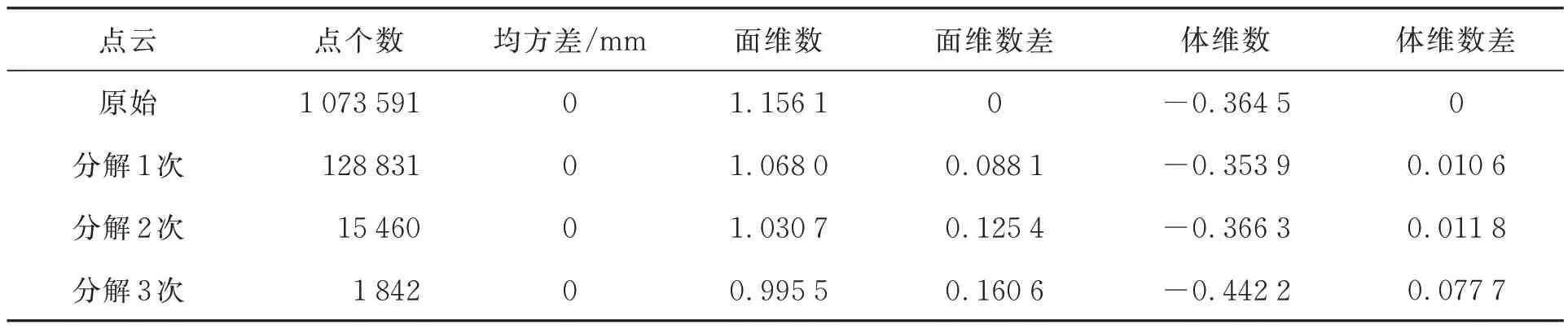
表3 曲率采样分解结果统计Tab.3 Statistics of curvature sampling decomposition results
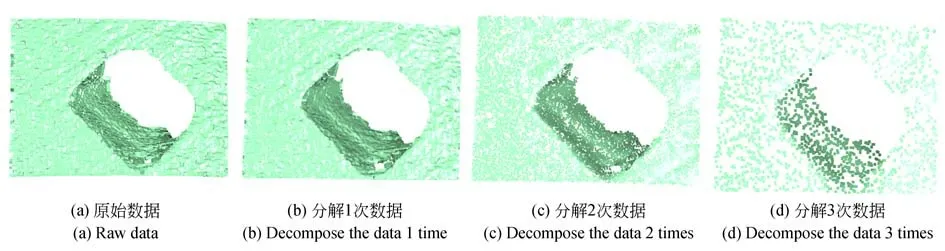
图8 曲率采样方法的分解结果Fig.8 Decomposation results of curvature sampling method
由表4可知,点数都大约等于上一次采样点数的八分之一。由于该采样方法考虑了尺度和数据量的影响,首先对原始点云进行平滑,然后在平滑后的数据上进行采样,所以均方差大致相等。根据各次分解采样结果的面维数与体维数与原始点云的面、体维数的差异,随着分解次数的增加,面维数差、体维数差越来越大。
对比4种分解方法的面维数和体维数差异,如图10所示,4种采样方法都是随着采样次数的增加,与原始点云的差异逐渐增大。由于结构光测量数据与显微测量数据量差异较大,需要对小尺度数据进行多次分解,多次分解后,小波分解采样的结果面维数与体维数差异均达到最小,因此小波分解采样方法优于其他方法。由于小波分解方法在分解3次时达到最优,分解第4次时已经失效,因此其他方法在第4次分解时也会失效。
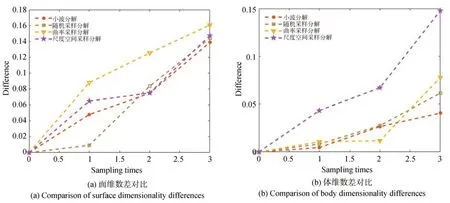
图10 不同分解方法差异性对比Fig.10 Comparison of differences between different decomposition methods
3.3 跨尺度点云配准实验
为了解决跨尺度点云因尺度与数据量上的差异而导致配准困难、配准精度低等问题,利用本文所提的方法对小尺度显微测量数据进行多尺度分解。经过3次有效分解,将近似尺度分解的数据与面结构光点云进行配准。配准分两步完成,首先通过手动交互式选取两片点云对应点,通过奇异值分解(SVD)求解旋转与平移变换矩阵,完成点云的粗配准;然后,利用迭代最近点(ICP)算法完成点云精配准,并将配准的变换关系应用于原始点云。经过3次分解与原始结构光的点云配准结果如图11所示。
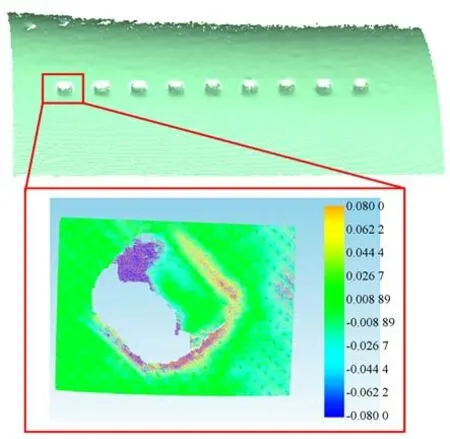
图11 气膜孔配准结果Fig.11 Pore registration results
将未经过尺度分解与经过不同次数尺度分解的点云与结构光测量点云进行配准,精配准误差与配准时间如图表5所示。由于小波采样在第二次采样时,面维数差与体维数差都不是最好,但是对应部位结构光测量点云数据量与显微测量近似尺度点云数据量还是存在较大差异,在保证不失效的情况下有必要再进行一次分解。基于三次分解尺度约束的配准,在保证面维数差与体维数差较小的情况下,时间与精度都得到进一步的改善。实验证明,所提方法应用于多尺度点云配准融合中,能够提高配准精度,与未经过尺度处理的点云直接配准相比,配准精度提升了61.36%。
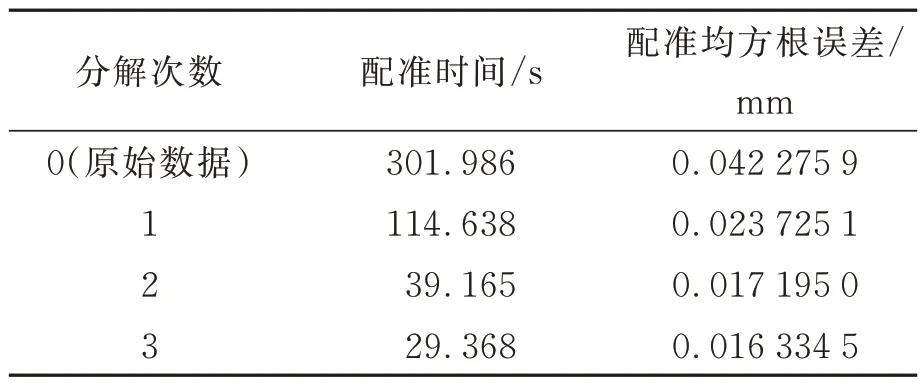
表5 小波方法多次分解配准误差对比Tab.5 Comparison of multiple decomposition registra⁃tion error for wavelet method
为了进一步验证本文所提方法的可行性,选取航空发动机上的某栅格零件与某航空发动机叶片进行多尺度宏微组合式测量。对于栅格零件,通过面结构光测量整体的大尺度数据,显微测量某条棱边,并进行配准实验;对于某航空发动机叶片,采用面结构光测量整体大尺度数据,显微测量边缘,并进行配准实验。
栅格零件的整体长度大约为80 mm,棱边宽度大约为0.4 mm,使用气膜孔测量实验中相同的计量设备检测,显微测量数据量为524 033,对应部位结构光数据量大约为1 000,检测数据如图12所示。通过本文方法进行多尺度有效分解3次,配准结果如图13所示,配准时间与均方根误差如表6所示,分别计算基于各次尺度约束的点云配准时间与均方根误差,实验证明分解3次时尺度约束配准效果较好,配准时间大幅度减少,精度提升了43.86%。

表6 栅格近似尺度约束配准误差对比Tab.6 Approximate scale of raster constrains the com⁃parison of registration errors

图12 栅格宏微组合式测量结果Fig.12 Macro-micro combined measurement results of raster
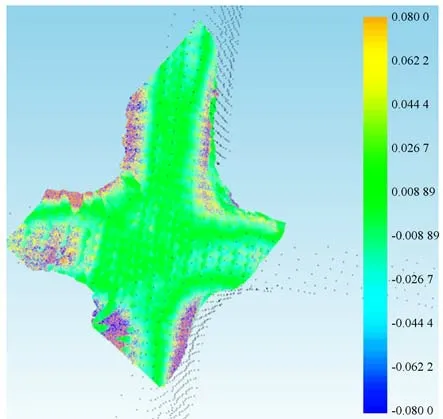
图13 栅格棱边配准结果Fig.13 Grid edge registration results
不带气膜孔叶片零件的整体长度大约为90 mm,叶片边缘的测量尺寸大约为1 mm×1 mm,使用气膜孔测量实验中相同的计量设备检测,显微测量数据为581 525,对应部位的结构光数据大约为1 200,检测数据如图14所示。通过本文方法进行多尺度有效分解3次,配准结果如图15所示,配准时间与均方根误差如表7所示。分别计算基于各次尺度约束的点云配准时间与均方根误差,实验证明分解3次时尺度约束配准效果较好,配准时间大幅度减少,精度提升了48.59%。
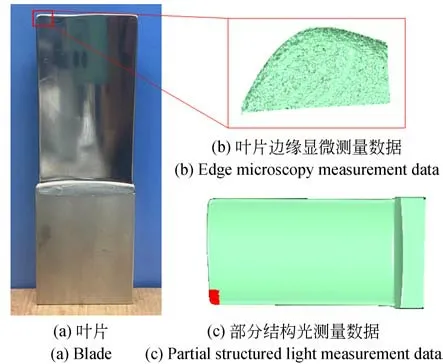
图14 不带气膜孔叶片检测Fig.14 Inspection results of leaf without pores

图15 叶片边缘配准结果Fig.15 Leaf edge registration results

表7 叶片边缘近似尺度约束配准误差对比Tab.7 Comparison of approximate scale constraint regis⁃tration errors of blade edges
4 结 论
在具有跨尺度微纳结构的高性能零部件光学测量领域中,宏微组合式方法利用多传感的方式分别获取不同尺度的数据,通过跨尺度数据配准融合技术实现宏微信息一体化。本文提出了一种基于离散小波变换的小尺度点云多尺度分解方法,此方法同时考虑了尺度与数据量的影响,每次分解后,数据量以大约8倍的速率减少,在与原始数据具有一定相似性的条件下,能够对小尺度数据进行有效分解,实现小尺度数据向大尺度数据过渡。实验结果表明,所提方法可以作为一种通用的小尺度点云多尺度分解方法,应用于航空发动机气膜孔数据配准中,配准精度提升了61.36%,并在叶片边缘与栅格零件检测中得到了有效验证。因此,所提方法对多传感测量与跨尺度数据配准具有一定的指导意义。
猜你喜欢
科技创新与应用(2021年31期)2021-11-09
北京大学学报(自然科学版)(2021年3期)2021-07-16
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
电脑爱好者(2020年19期)2020-10-20
中北大学学报(自然科学版)(2020年4期)2020-07-13
电子制作(2019年13期)2020-01-14
太空探索(2016年5期)2016-07-12
弹箭与制导学报(2015年1期)2015-03-11
时代英语·高三(2014年5期)2014-08-26
雷达学报(2014年4期)2014-04-23