基于像差补偿的近红外显微干涉硅通孔测量
2023-03-10 08:18吴春霞马剑秋高志山郭珍艳
光学精密工程 2023年3期
吴春霞, 马剑秋, 高志山, 郭珍艳, 袁 群
(南京理工大学 电子工程与光电技术学院,江苏 南京 210094)
1 引 言
随着电子元器件向着高性能、低功耗、尺寸更小的方向不断发展,硅通孔(Through Silicon Via, TSV)工艺成为半导体器件三维封装的技术途径之一。TSV是指在芯片和芯片之间制作垂直导通,实现芯片之间的堆叠和互连的技术[1-2]。然而,半导体器件三维集成对TSV的尺度提出了更高的要求,而且半导体制造的高效率对TSV三维形貌的在线无损测量提出更快的要求。对于高深宽比TSV三维形貌的测量,非光学测量主要包括扫描电子显微术(SEM)[3]、原子力显微术(AFM)[4]等方法。这种方法具有破坏性,仅对陪片进行测量,且制样和SEM扫描拼接测量全过程耗时数小时,测量效率低,不适用于在线测量。光学测量主要包括白光显微干涉法[5-7]、共焦显微成像法[8-9]、光谱反射法[10-15]等,具有非接触、无破坏、测量效率高等优点。韩国科技大学的研究人员提出了一种结合低相干近红外干涉光谱技术、共聚焦技术和光学显微技术的新型混合光学探头,实现了直径为5.954 μm、深度为40.420 μm、深宽比约为6.8∶1的TSV样品的测量[9]。韩国标准科学研究院的研究小组采用近红外飞秒脉冲激光的光梳作为光源,基于光谱干涉法实现了深宽比为7∶1的TSV的深度测量[10]。共焦显微成像法测量的样品深宽比有限,光谱反射法无法直接获得待测样品的三维形貌分布。白光显微干涉法利用宽带光的低相干特性,与显微成像技术相结合,可一次性复原出待测样品的三维形貌[16]。国内中北大学的研究人员利用白光显微干涉法测量了宽度为22.6 μm、深度为89.78 μm的沟槽,深宽比为4∶1,但对于宽度小于5 μm的高深宽比沟槽,探测光则无法到达沟槽的底部[7]。白光显微干涉法的工作波长为可见光,对于TSV硅通孔材料不透明,经过干涉显微物镜的聚焦光束探测高深宽比TSV底部时,仅中央小数值孔径(Numerical Aperture, NA)的光束为有效探测光束,边缘NA的光束经过深孔的侧壁多次反射形成串扰光束。因此,韩国首尔大学的研究人员通过在照明光路中引入孔径光阑,限制物镜NA,排除多次反射光的串扰,得到了直径为4.27 μm、深度为47.9 μm、深宽比为11.2∶1的TSV的顶部直径、孔深度等参数,但底部形貌失真,横向分辨率低,仅为数微米[5-6]。
由于硅材料在近红外波段具有较高的透过率,采用近红外宽带光源穿透TSV的高深宽比结构,有望突破硅基材料对大NA探测光的遮挡,增大探测光的光通量,增强近红外宽带光干涉信号,用于提取TSV的形貌信息。然而,大NA光束会被TSV结构调制,降低光束聚焦性,产生像差,严重影响成像质量和干涉条纹的对比度。自适应光学是以成像波前像差校正为目标的波前控制技术,能实时补偿由光束传播、系统光学误差、成像环境和运动扰动等因素引入的波前畸变,从而改善系统成像性能,获取高分辨率目标图像,目前广泛应用于天文成像或者生物成像中的动态像差补偿[17]。本文引入变形镜自适应像差补偿技术,消除近红外光源测量TSV高深宽比结构所引入的调制像差,提高探测光的聚焦能力,增强TSV的底部成像和干涉信号。
为了实现对高深宽比TSV尺寸的高精度无损测量并实现TSV的三维形貌复原,本文提出了基于像差补偿的近红外显微干涉法。依据COMSOL Multiphysics有限元仿真软件得到的三维TSV高深宽比结构对探测光的调制像差规律,设置有待变形镜补偿的像差种类和量值,引入基于频域的评价函数指标阈值,判定TSV底部图像的聚焦状态,获得待测TSV清晰的底部像,提升探测光的重聚焦能力。在此基础上,利用构建的近红外显微干涉系统对多种深宽比的TSV样品进行垂直扫描干涉测量,解算出TSV的深度值并得到了其三维形貌分布。
2 原 理
2.1 基于像差补偿的近红外显微干涉光学测量系统
图1为Linnik型近红外反射式显微干涉测量系统的光路。整个光学系统主要由4部分组成:(1)近红外宽光谱低相干科勒照明系统,工作波长为1.25~1.45 μm;(2)由参考臂和测试臂构成的Linnik型显微干涉系统;(3)由变形镜(De⁃formable Mirror, DM)构成的光瞳像差主动补偿模块;(4)由压电陶瓷(PZT)和红外探测器CCD构成的干涉图同步扫描采集与处理系统。近红外短相干光源LS发出的光束经过由透镜L1,L2,L3组成的柯勒照明系统产生多视场均匀照明光后,经立方分光棱镜BS1分为测试光和参考光;打开光阑L,参考光经过平面反射镜M2,M3和显微物镜MO2,照射到平面反射镜M4上,并原路返回经立方分光棱镜BS1和透镜L4被红外探测器CCD接收;测试光经DM反射,依次经反射镜M1和显微物镜MO1,照射放置于压电陶瓷PZT上的待测样品S;待测样品S被照明后,带有调制像差的反射光原路返回至变形镜DM,光阑L遮挡住参考臂后变形镜对像差进行补偿,补偿结束后,打开光阑L使得参考光在红外探测器CCD上与测试光形成干涉。

图1 Linnik型近红外反射式显微干涉测量系统的光路Fig.1 Optical path of Linnik near-infrared reflective mi⁃cro interferometry system
测量系统的工作波长为1.25~1.45 μm,它是硅基材料的透射窗口波段,该波段的大NA探测光可穿透硅基材料到达深孔底部,有利于提高高深宽比TSV深孔底部的探测光通量。现有的近红外显微物镜主要集中于生物医学领域,其波段一般是0.8~1.1 μm,不是硅基最有效的近红外透过窗口,长工作距、大NA近红外物镜的设计与研制关键技术没有先例可参考。该系统配备了自主研发的大NA(0.5~0.9)近红外宽光谱(1.25~1.45 μm)显微物镜模组MO1和MO2。另一方面,大NA近红外探测光入射高深宽比TSV深孔时,必然引起衍生的调制像差,从而严重影响探测光在深孔底部的能量聚焦。为此,该系统配备了由变形镜DM构成的光瞳像差主动补偿模块,用于补偿调制像差,提高探测光的聚焦能力,增强TSV的底部成像和干涉信号。
2.2 像差补偿与三维形貌提取原理
宽带光源发出经显微物镜会聚的大NA探测光束,穿过具有一定厚度的待测硅晶圆或硅基TSV样品后,必然在测试臂引入像差,影响宽带光干涉显微检测系统的成像性能和干涉信号对比度。
应用自适应光学或主动光学进行像差补偿,首要问题是能够获取和表征系统光瞳面上包含像差的光瞳函数,不失一般性,将出瞳处的波前相位看作是一个标准球面波和像差波前的叠加。标准球面波可用理想透镜的相位变换因子表示,即:
需要求解球面波经过样品调制后产生的像差φ(x,y)。因而,出瞳处的波前复振幅表示为:
式中A(x,y)是出瞳处振幅分布。光瞳函数为:
式中:φ(x,y)是球面波经过样品调制后产生的光瞳像差。本文选用标准Zernike多项式来拟合像差,即是具体的Zernike项系数,Zj是Zernike项,N为整数。
如图1所示,DM用来补偿像差,该像差补偿系统由多个驱动器单元组成,采用机械变形法来匹配期望的共轭波前,每个驱动器对表面Zi(x,y)的作用效果即为变形镜的影响函数[18-19]。这些影响函数均为线性函数,通过施加合适的幅度Ai至M个驱动器上产生期望的表面S(x,y)。影响函数的线性方程组表达式如下:
操控变形镜进行像差补偿就是将变形镜每个驱动器的影响函数Zi(x,y)用泽尼克多项式拟合,即可将需要的各项泽尼克像差系数转变为施加给变形镜各个驱动器的电压值,即:
变形镜对光瞳像差补偿达到预期目标后,即可在CCD上得到干涉信号对比度增强的干涉条纹和清晰的底部成像。在此基础上,利用垂直扫描干涉法[20]对TSV深孔展开三维形貌测量。近红外光为宽带光源,其显微干涉条纹图是不同波长光的干涉叠加结果,光强分布为:
其中:I0为背景光强,λc为光源中心波长,2λb为光谱的带宽,ψ(λ)为干涉图在CCD上关于波长λ的能量分布,z为PZT的相对位置,zp为零光程差位置。因此,当像面像素点在零光程差位置即z=zp时,干涉强度最大。当PZT在垂直方向上移动时,测试臂与参考臂的光程差为零,像面上获取的干涉信号最大,形成一系列相干峰。此时,一系列相干峰位置对应于样品面的一系列相对高度,这些随视场点变化的相对高度信息,形成了样品表面的三维形貌。
2.3 TSV底部成像清晰度评价函数
变形镜对光瞳像差补偿时,由于补偿到位的图像有更尖锐清晰的边缘,相较于未补偿到位的模糊图像具有更多的高频分量,因此可使用基于频域的评价函数来判定TSV底部的成像状态,判断变形镜是否达到预期的补偿效果[21]。分析图像频域特性的常用手段是傅里叶变换,对于连续 图 像g(x,y),当时,存在频域变换,即:
对于M×N个像素的图像进行二维离散傅里叶变换,得到:
图像的功率谱函数表示为:
二维离散傅里叶变换后的图像清晰度评价函数为:
3 仿 真
TSV对大NA探测光标准球面波引起的调制像差与TSV的孔直径、深度和边界条件等表征参数有关,随待测TSV样品表征参数的变化,补偿像差的量值和种类会相应发生变化。因此,为了让变形镜能高效补偿由TSV引起的调制像差,使近红外宽带光显微干涉系统检测TSV底部时能获取清晰的底部图像和明显的相干峰干涉信号,仿真研究了TSV对探测光产生的像差调制规律。
3.1 TSV模型建立
COMSOL Multiphysics仿真软件以有限元法为基础,通过求解偏微分方程(单物理场)或偏微分方程组(多物理场)来模拟真实的物理现象。本文仿真所用的功能组件为COMSOL的波动光学模块,该模块从麦克斯韦方程出发,将仿真区域划分为多个离散网格,通过定义边界条件设定入射场,以设置初始值,通过不断的迭代计算出近场的复振幅。如图2所示,这里以直径为10 μm、深度为65 μm的TSV阵列为例,阐述仿真中TSV模型的建立方法(彩图见期刊电子版)。图中灰色区域为TSV,常规标准大气压下,硅折射率为3.5,蓝色区域为空气,折射率为1.0。红色线条为入射边界,绿色线条为反射电场的接收边界,模型周围设置10 μm的完美匹配层,用于吸收到达边界的电场。设置入射电场为平面波,定义光源的工作波长为1.325 μm,焦距为 310 μm,使探测光恰好聚焦到TSV的底部,且NA=0.5。设置最大网格单元尺寸为λ10,最小网格单元尺寸为λ20,构建网格。模型求解的自由度与网格划分粗细有关,所有模型求解的自由度数在1×107数量级,达到网格解析波长的所需标准,在内存允许的情况下保证了计算的准确性。

图2 直径10 μm、深度65 μm的TSV阵列孔模型建立Fig.2 Modeling of TSV array hole with diameter of 10 μm and depth of 65 μm
3.2 仿真结果及分析
由于不能保证探测光的光轴与样品底部的中心轴完全重合,因此需要研究样品底部不同位置采样点的像差规律。本文仿真了探测光聚集在TSV底部A,B两点的像差,A点是TSV底部的中心点,B点是TSV底部偏离中心4 μm的一个点。平面波从左侧边界入射,聚焦在TSV的底部位置并反射回去,电场传输过程如图3所示。COMSOL仿真得到光场近场复振幅后,用近轴透镜构建显微物镜模型,模型中样品位于显微物镜的前焦面上,光瞳面位于显微物镜的后焦面上,构成具有傅里叶变换运算的光场传播光路模型,在MATLAB中计算光瞳函数。图4和图5分别为光瞳面的波面相位和标准泽尼克多项式拟合结果。可以看出,点的像差主要是系数为3.69λ的离焦和系数为0.2λ的球差,B点的像差主要是系数为3.87λ的离焦、系数为-2.5λ的x方向彗差和系数为1.01λ的球差。由此可知,TSV底部中心点(A)的像差主要类型为离焦和球差,TSV底部偏中心点(B)的像差主要类型为离焦、球差和彗差。
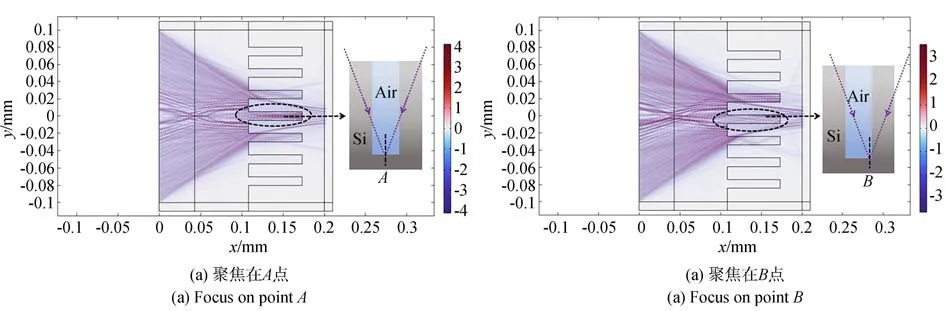
图3 探测光聚焦在A,B两点的电场传输图Fig. 3 Electric field transmission diagram of probe light focused on points A and B

图4 A,B点的波面相位Fig.4 Wavefront phase of points A and B
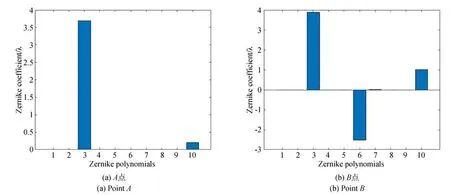
图5 A,B点像差的泽尼克多项式拟合系数Fig. 5 Zernike polynomial fitting coefficients of aberration of points A and B
4 实验与结果分析
4.1 实验装置与补偿效果
根据图1系统光路构建的Linnik型近红外显微干涉测量系统如图6所示,实验使用NA为0.5、放大倍率为20×、工作波段在1.25~1.45 μm的显微物镜。整个测试过程分为三步:第一步,根据3.2小节的仿真结果,设置需变形镜补偿的像差种类和量值,获得待测TSV底部清晰的像和干涉条纹;第二步,通过PZT驱动待测样品进行垂直扫描,在红外探测器CCD上同步接收待测样品不同深度表面的干涉条纹图;第三步,采用垂直扫描干涉算法对干涉图进行处理,得到待测样品的深度和宽度测量结果。实验过程中,将宽度为10 μm、深度为65 μm的TSV样品放在PZT上方的测试平台上,调试光路使顶部清晰成像且存在高对比度干涉条纹,随后启动PZT对TSV孔进行垂直扫描成像。该实验以λc/8的步长对TSV样品进行垂直扫描,共采集TSV孔顶部和底部426幅图像,前213幅为顶部附近的干涉图像,后213幅为底部附近的干涉图像。
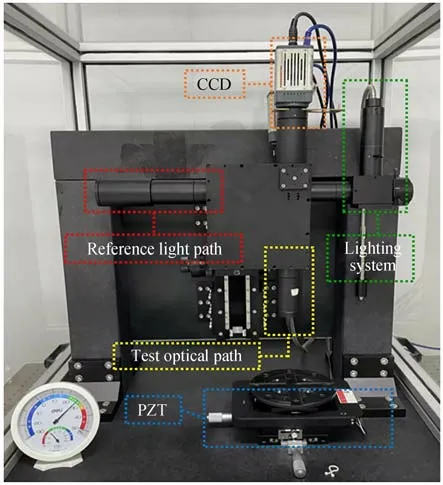
图6 Linnik型近红外显微干涉测量系统Fig.6 Linnik near-infrared micro interferometry system
最终,采集到的未进行像差补偿的TSV孔顶底部的干涉图像如图7所示,图中所示为间隔λc/8步长的连续4幅图。样品顶部的干涉条纹清晰可见,但由于探测底部的入射光和反射光经过TSV高深宽比结构的调制,样品底部的干涉条纹变得微弱,难以分辨,孔底部图像也极为模糊。

图7 像差补偿前的顶底部干涉图Fig.7 Interferogram of top and bottom before aberration compensation
为使样品底部图像清晰且增强底部的宽谱干涉信号和对比度,需要进行光瞳像差的补偿。实验用于像差补偿的装置是ALPAO变形镜,由69个驱动器单元组成,光瞳直径为10.5 mm,最大倾斜补偿量为60 μm,最大球差补偿量为40 μm。根据3.2节仿真所得的各项像差系数和占比,转换成相应的电压值驱动变形镜,变形镜将补偿电压分成20次对光瞳像差进行迭代补偿。利用2.3节所述的基于频域的评价函数作为图像清晰度评定指标,结合爬山搜索法确定最佳的像差补偿位置。如图8所示,当像差补偿迭代到第12次时,式(10)中的图像清晰度评价函数f最大,即此时TSV的底部像最清晰,如图9所示。

图8 迭代补偿20次的图像评价函数Fig. 8 Image evaluation function with 20 iterations of compensation
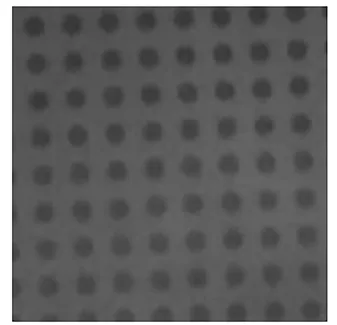
图9 迭代补偿12次时的孔底部图像Fig.9 Bottom image at 12 times of iterative compensa⁃tion
补偿达到预期目标后,在测试光路中加入参考光,对样品进行垂直扫描干涉测量。TSV孔顶底部的干涉图如图10所示,与补偿前的图7比较可发现,样品的底部图像明显更清晰。比较补偿前后底部一个像素点的干涉信号,如图11和图12所示,补偿前混叠相干信号较多,不利于相干信号的识别和解调;而补偿后的相干信号包络变得清晰,干涉信号对比度得到有效增强。

图10 像差补偿后的顶底部干涉图Fig.10 Interferograms of top and bottom after aberration compensation
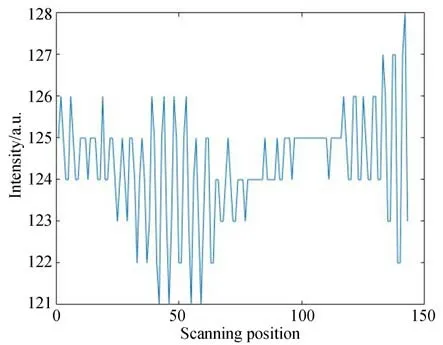
图11 像差补偿前底部一个像素点的干涉信号强度Fig.11 Interference signal intensity at one point on bot⁃tom before aberration compensation
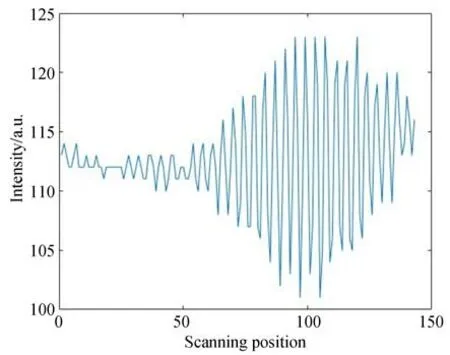
图12 像差补偿后底部一个像素点的干涉信号强度Fig.12 Interference signal intensity at one point on bot⁃tom surface after aberration compensation
4.2 近红外显微干涉与白光显微干涉测量对比
基于4.1节的测量结果,采用垂直扫描干涉算法对所获得的426幅顶底部干涉图像进行处理,得到待测TSV的三维形貌复原图和一个方向的一维轮廓曲线,分别如图13(a)和图13(b)所示。
参照现有的国际标准[ISO 5436-1:2000(E)]和W/3准则,在TSV样品测量中,TSV底部的理论宽度为W,则高度测量结果的示值读取区域为距离TSV理论边缘位置W/3以外的区域。重复测量10次并计算TSV深度的均值、标准差,以及均值相对SEM检测结果的绝对误差和相对误差,视场范围内其中一个孔(图13(a)方框)的10次测量结果如表1所示。深度平均值为65.95 μm,顶 部 直 径 为9.60 μm,底 部 直 径 为9.20 μm,与图13(c)的扫描电镜结果(65.27 μm)对比,深度测量相对误差为1%。从10次检测结果的标准差可以看出,本文方法具有良好的重复性和鲁棒性。
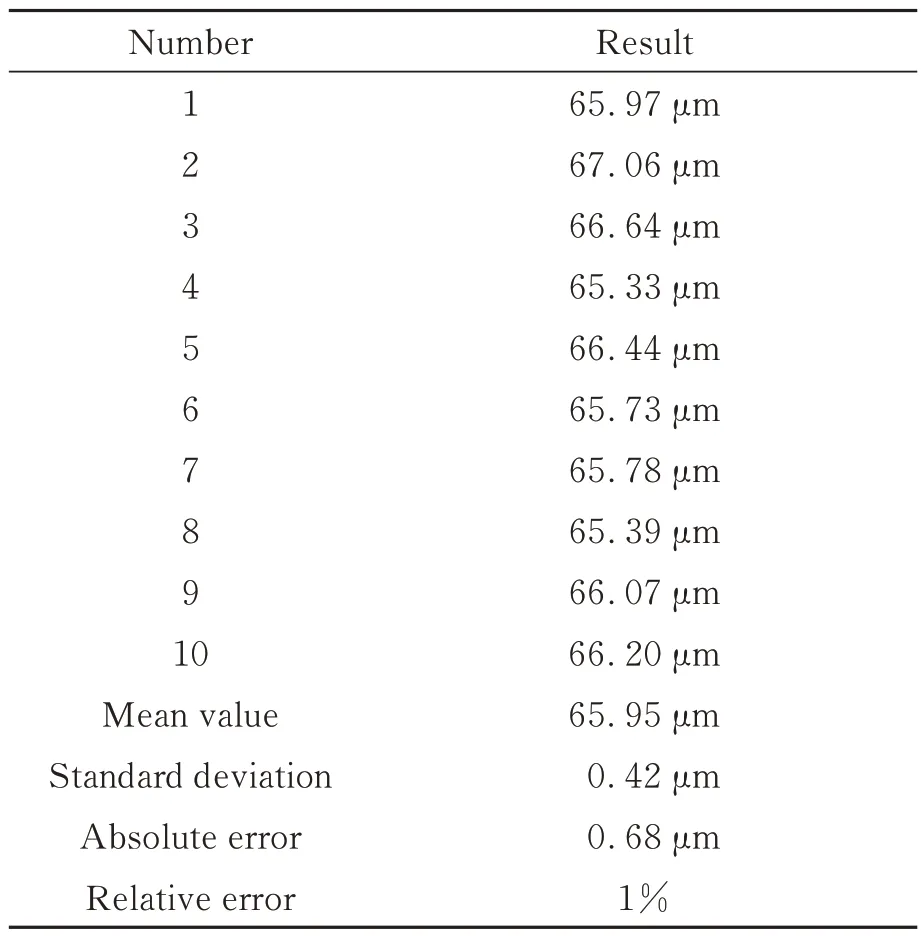
表1 采用近红外显微干涉法测量TSV一个孔深度的10次测量结果Tab.1 Ten measurements of depth of one hole in TSV using near-infrared micro interferometry
图13(d)是白光显微干涉法的测量结果,依次为TSV的一维轮廓、三维形貌和底部干涉条纹图。由于TSV的深宽比较大,白光显微干涉法的探测光难以到达样品底部,底部成像极为模糊且无干涉信号,10次白光显微干涉实验均无法测量出样品的三维形貌。
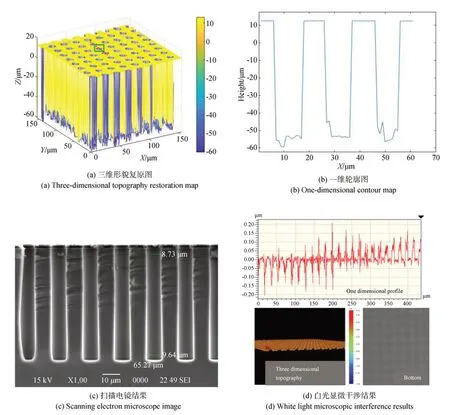
图13 不同方法测量TSV的结果Fig.13 Results of TSV measurement by different methods
为进一步研究像差补偿近红外显微干涉法相对于白光显微干涉法测量TSV的优越性,本文分别用这两种方法测量了直径为20 μm、深度为77 μm、深宽比为3.85∶1和直径为10 μm、深度为103 μm、深宽比为10.3∶1的TSV样品。图14(a)和图14(b)分别是白光显微干涉法和像差补偿近红外显微干涉法测量深宽比为3.85∶1的TSV孔顶底部的干涉图,每种方法测量10次,深度平均值分别为76.62 μm和77.12 μm,但对于TSV的底部成像,后者明显比前者更加清晰,孔底部的直径平均值分别为11.79 μm和20.00 μm。因此,与白光显微干涉技术相比,本文方法可以在保证深度测量精度的情况下提高TSV的底部成像清晰度。对于深宽比为10.3∶1的TSV,本文方法也可准确测量出其深度值,如图15所示,10次深度测量结果的平均值为103.85 μm,顶底部直径平均值分别为10.02 μm和10.72 μm。
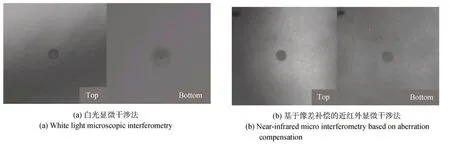
图14 两种方法测量深宽比为3.85∶1的TSV顶底部干涉图Fig.14 Top and bottom interference patterns of 3.85∶1 aspect-ratio TSV with two methods
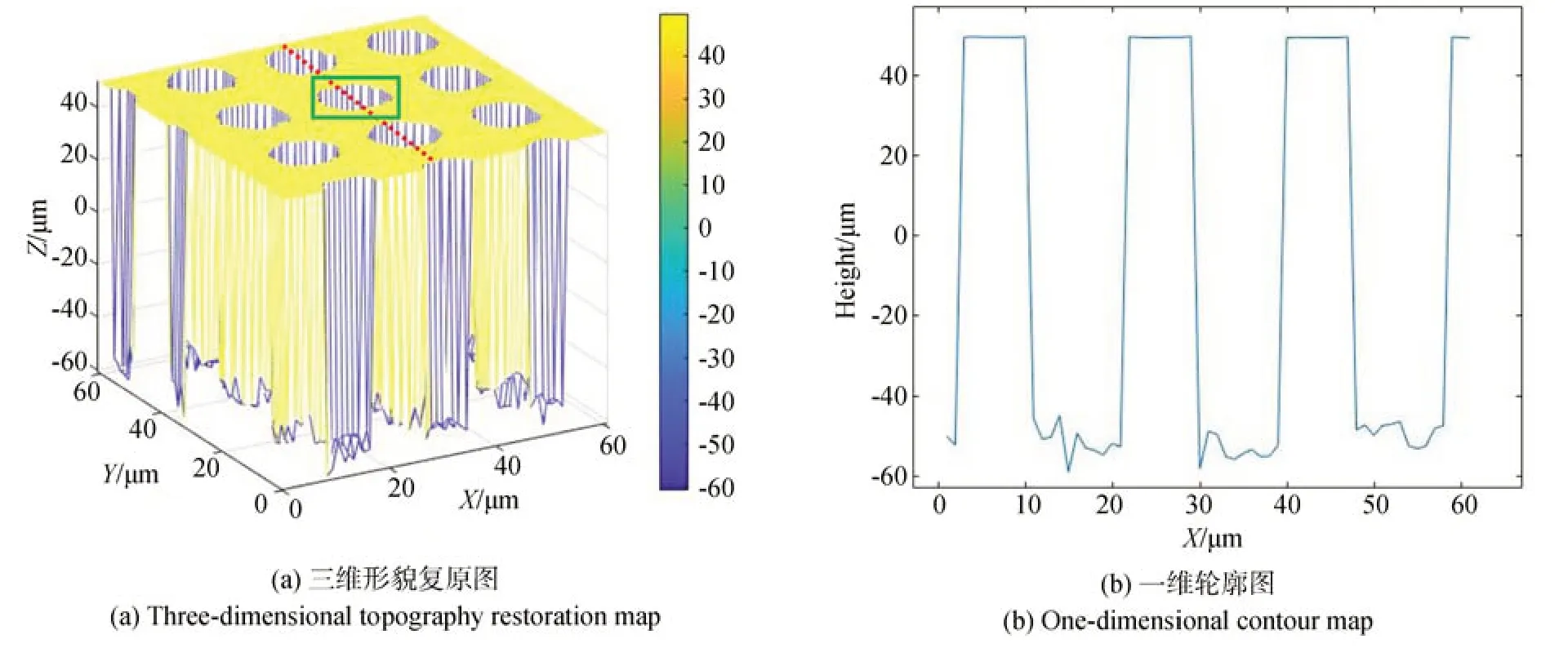
图15 基于像差补偿的近红外显微法对深宽比为10.3∶1的TSV测量结果Fig.15 Results of TSV with aspect ratio of 10.3∶1 by near-infrared micro interferometry based on aberration compensation
5 结 论
本文提出了基于像差补偿的近红外显微干涉法,用于测量深宽比大于6∶1的TSV。采用能够穿透硅通孔的近红外宽带光作为光源,利用COMSOL Multiphysics有限元仿真软件研究了TSV高深宽比结构对探测光的调制规律,用于指导变形镜补偿的像差种类和量值,分析发现TSV底部中心点位置的像差主要为离焦和球差,底部偏离中心点位置的像差增加了彗差。随后,在实验中用变形镜自适应像差补偿模块对TSV引入的调制像差进行补偿,用基于频域的评价函数评定底部图像的清晰状态,获得待测TSV清晰的底部图像。最后在此基础上,使用垂直扫描干涉法得到待测TSV的深度与其三维形貌分布。实验测量了直径为10 μm、深度为65 μm、深宽比为6.5∶1和直径为10 μm、深度为103 μm、深宽比为10.3∶1两种TSV深孔,与高精度的SEM测量结果对比,深度测量的相对误差为1%。最后,与白光显微干涉技术进行对比,结果表明本文方法可以获得清晰的高深宽比TSV的底部图像,有效增强底部的宽谱干涉信号和对比度,能够准确测量更大高深宽比TSV的三维形貌。
猜你喜欢
粉末冶金技术(2021年3期)2021-07-28
山东冶金(2019年5期)2019-11-16
人生十六七(2016年14期)2016-12-01
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
光学精密工程(2016年3期)2016-11-07
光学精密工程(2016年2期)2016-11-07
科学中国人(2015年8期)2015-07-14
中国光学(2015年1期)2015-06-06
现代农业(2015年1期)2015-02-28