
管线仪和探地雷达在水利工程中的应用
2023-03-07 01:40赵凯鹏
水电站机电技术 2023年2期
赵凯鹏
(广东省水利电力勘测设计研究院有限公司,广东 广州 510635)
1 引言
随着我国经济的迅速发展,水利工程行业充满了发展机遇,同时也面临严峻考验[1]。在水利工程的设计和施工阶段,避开地下管线是至关重要的一个环节。地下管线(如石油管道、燃气管道、国防通信管线、高压电力管线等)承担着输送石油、天然气、通信、电力等功能,是城市发展的基础[2]。地下管线的复杂性高、信息化程度低、管理不统一等,难以通过资料搜集和整理获得准确的地下管线信息。特别是施工阶段,挖断管线时有发生。不仅存在重大安全隐患,而且造成经济损失[3]。如何获得准确地下管线信息,成为了一个重要课题。
随着科学技术的发展,地下管线的探测方法也愈加多样,主要包括直接开井测量和物探方法间接测量。使用物探方法探测地下管线的物性基础在于:目标管线和周围介质存在物性差异,如介电常数、磁导率、电导率、密度等。物探方法如高密度电法、井中磁法、瞬变电磁法等[4],受到场地和测区环境的限制,应用场景有限,管线仪法和探地雷达法仍是基础、高效、便捷的地下管线探测方法。文章将从探测原理、探测方法、数值模拟和实际应用几方面进行探讨。
2 管线仪的工作原理和应用
2.1 管线仪的探测原理
常用的管线仪如RD8100 和RD8000 等,探测原理为电磁感应,即:管线仪发射机发射电磁信号,在金属管线中会产生感应电流(也称为等效电流),感应电流往周围激发出变化电磁场,接收机接收到该电磁信号。根据接收到的电磁信号,就可以判定目标管线的位置和埋深等信息[2,3]。
2.2 管线仪的探测方法
根据管线仪发射机激发信号的方式不同,可以将常用的探测方法分为3 种:夹钳法、直连法、感应法[3]。
(1)夹钳法是指将管线仪配套的环形夹钳闭合地夹在管线上,使得管线穿过夹钳。主要用于通信、电力、路灯等管线的探测,优点在于抗干扰能力强,缺点在于必须有出露的管线才可以使用。
(2)直连法是指将管线仪接线的负极(黑色)接到接地电极,正极(红色)接到管线上。接地电极在情况允许下,尽可能远且垂直于管线走向,正极连接管线的位置要除锈、刮开保护壳(刮开油漆或者塑料层)。主要应用于有示踪线的燃气管、有电位测试桩的石油管或燃气管、铸铁输水管等。优点在于可以较长距离的追踪管线,缺点是抗干扰能力相对较弱。
(3)感应法是指将发射机放置在目标管线上方,接收机沿着管线走向确定其位置和深度大方法。该方法的优点在于适用性强,缺点在于易受到其他信号的干扰。在实际工作中,以上两种方法不适用才使用该方法。
根据管线仪接收机接收信号确定位置和深度的原理不同,可以将常用探测方法分为以下3 类:极大值法(峰值法)、极小值法(谷值法)、极大/极小值法(峰值/谷值法)。将管线中等效电流简化为无限长直导线,根据右手螺旋定则,管线周围会产生“环状”的磁场,如图2 所示。
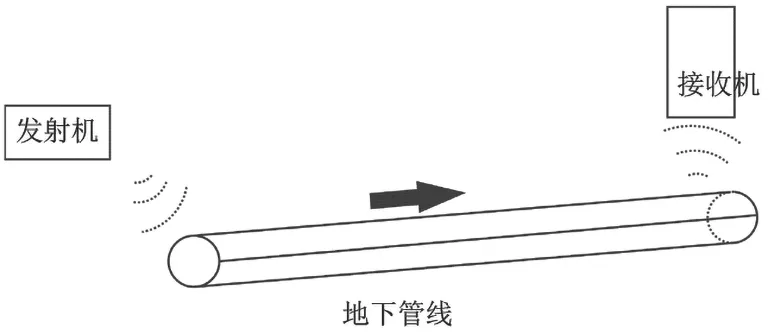
图1 管线仪探测原理示意图
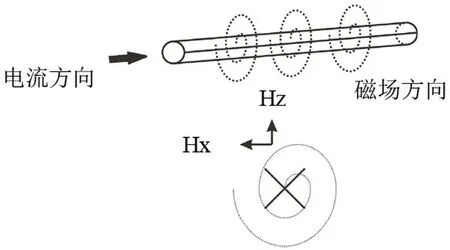
图2 等效电流产生电磁场示意图
在目标管线正上方的磁场水平分量达到最大,垂直分量最小。测量水平分量对应极大值法,测量垂直分量对应极小值法。RD8100 接收机内部有2个水平线圈(用于极大值法)和1 个垂直线圈(用于极小值),采用极大值法定位时2 个水平线圈工作,抗干扰能力较强;采用极小值定位时垂直线圈工作,抗干扰能力相对较弱;采用极大/极小值法定位时,结合以上2 种方法,但隔一段距离需要极大值法或极小值法验证。
2.3 管线仪的数值模拟
等效电流在周围激发磁场的基本解析表达式[2,5]如式(1)、(2):
式中:I为电流大小,μ为管线周围介质的磁导率,h为地面到管线的距离,x为探测点到目标管线地面投影的距离。以某测区实际探测的情况为例,电流为10 mA,h埋深为0.8 m,周围介质为土壤,磁导率为0.001。地面的信号Hx和Hz如图3 所示,可以看到极大值法和极小值法管线磁场信号变化规律。极大值法在目标管线正上方达到最大,离目标管线越远,Hx的值越小,趋近于0,如图3 中线1 所示。极小值法在目标管线正上方为0 值,距离目标管线为h时有最大值,远离目标管线Hz的值越小,趋近于零。若考虑场的方向,极小值的规律如图3线2 所示;只考虑大小,极小值法的规律如图3 中线3 所示。图3 中极小值法线2 和线3 在场值为正时,曲线完全重合。
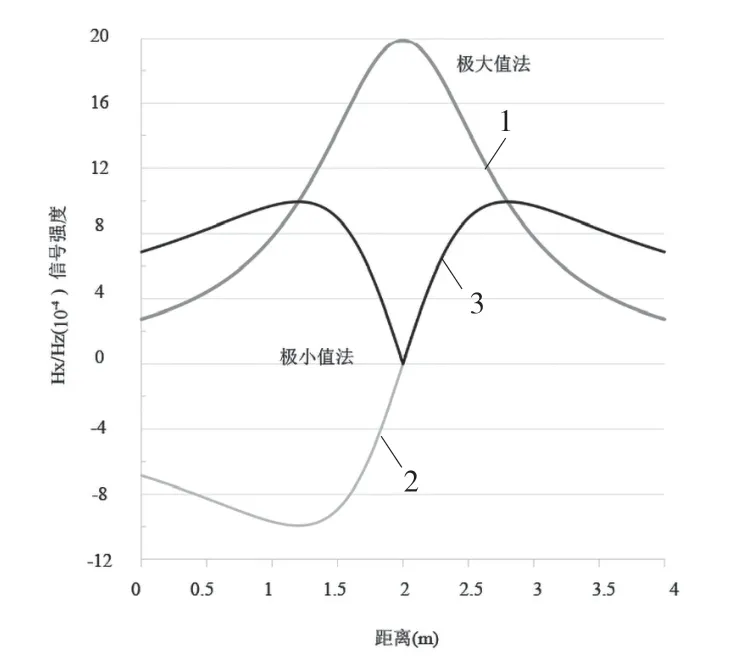
图3 极大值法Hx 和极小值法Hz 模拟示意图
若目标管线附近存在其他干扰源,假设距离目标管线0.5 m 处有其他信号干扰,等效电流为9 mA,埋深为0.8 m,可以对干扰情况下的磁场进行模拟,模拟结果如图4~图7。
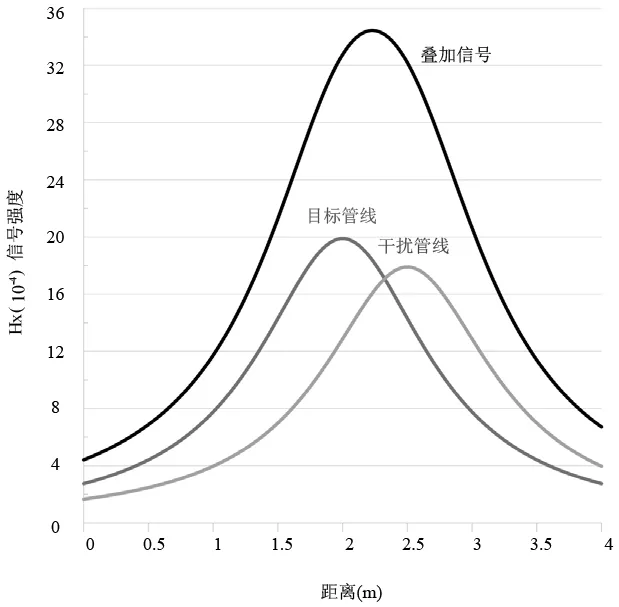
图4 极大值法Hx,同向电流模拟示意图
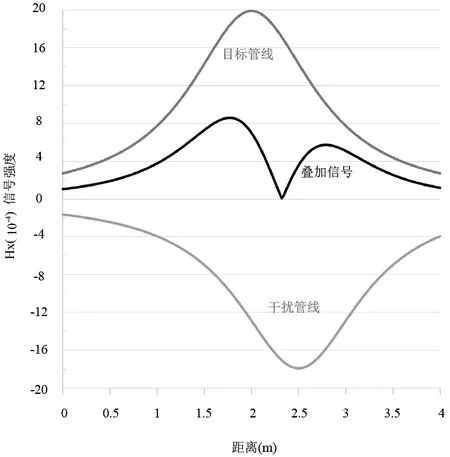
图5 极大值法Hx,反向电流模拟示意图

图6 极小值法Hz,同向电流模拟示意图
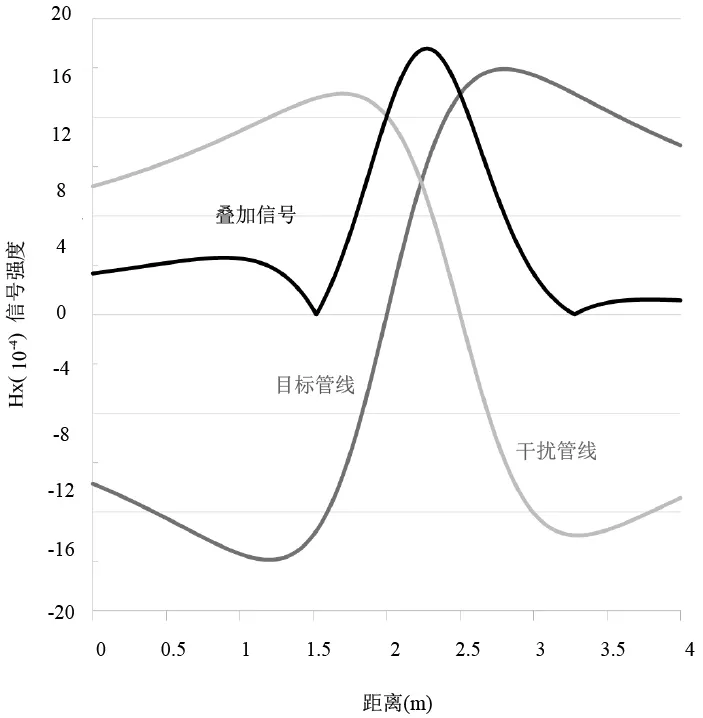
图7 极小值法Hz,反向电流模拟示意图
如图4 所示,干扰源和目标管线中的等效电流一致时,叠加信号强度变大,峰值往干扰源方向偏移;如图5 所示,等效电流方向相反极大值法探测时,叠加信号强度变小,且出现了两个极大值点,不对应目标管线,在实际中会造成探测结果误差。
如图6 所示,目标管线和干扰管线等效电流方向一致时,叠加信号的极小值偏向干扰管线方向。如图7 所示,等效电流相反极小值法探测时,叠加场中有两个极小值点,与目标管线不对应,在实际探测中会产生误差。
2.4 管线仪实际应用
(1)上节讨论的干扰源与目标管线的等效电流大小近似,产生了如图5 和图7 中的误差情况。实际探测中可以改变发射机的发射频率,重复探测来确定管线的位置和埋深。
(2)若测区中无明显管线出露,可以采用感应法:一人手持发射机,另一人手持接收机,间距15~20 m同时移动在测区内感应,确保无遗漏。
(3)管线探测时,可以在有出露或埋深较浅的位置开挖验证,确保探测准确性。
3 探地雷达的工作原理和应用
3.1 探地雷达的探测原理
基于电磁波遇到不同的介质会发生反射和透射的原理,探地雷达发射天线向地下发射电磁波,遇到管线发生反射和透射,反射回地面的信号被接收天线接收,透射信号向下传播,直到信号能量耗尽[4,6]。根据反射信号的走时和强度,经过数据处理可以确定地下管线的材质、管径、埋深等信息。
3.2 探地雷达的探测方法
探地雷达根据工作方式可以分为以下3 类:A-scan、B-scan、C-scan。其中A-scan 即为连续采集模式,发射天线和接收天线位置固定,采集数据对应地面某一点的地下情况;B-scan 即为沿着剖面线采集的方式,发射天线和接收天线相对位置固定,同时沿着某一设定好的测线进行探测,采集的数据对应测线下剖面的地下情况,常见的“推车”工作方式即为该工作方式;C-scan 即为在地面布置一定间距的测线,在每条测线上进行B-scan 测量,采集数据对应地下三维情况。
3.3 探地雷达的数值模拟
探地雷达数值模拟的物理方程是Maxwell方程,对该方程进行微分表示,推导出符合探地雷达模拟的二维横磁波(TM)方程[7],如式(3):
式中:Ez对应电场的z 分量,Hx、Hy对应磁场的x 和y 分量,ε、μ对应介电常数和磁导率,σ、ρ对应电导率和电荷密度。使用有限差分法对式(3)进行离散,就可以进行正演模拟。
GprMax 是探地雷达时间域有限差分正演软件,使用该软件需要对以下参数进行定义:模型大小、网格尺寸、时窗长度、介质参数、子波类型,发射天线和接收天线位置及步进距离,介质在模型中的位置等;吸收边界和并行等参数为默认。
设置模型大小为4 m×3 m,网格尺寸为0.005 m,时窗为60 ns,子波是主频200 MHz 的雷克子波,天线步进距离为0.1m,介质参数[6]见表1 所示。
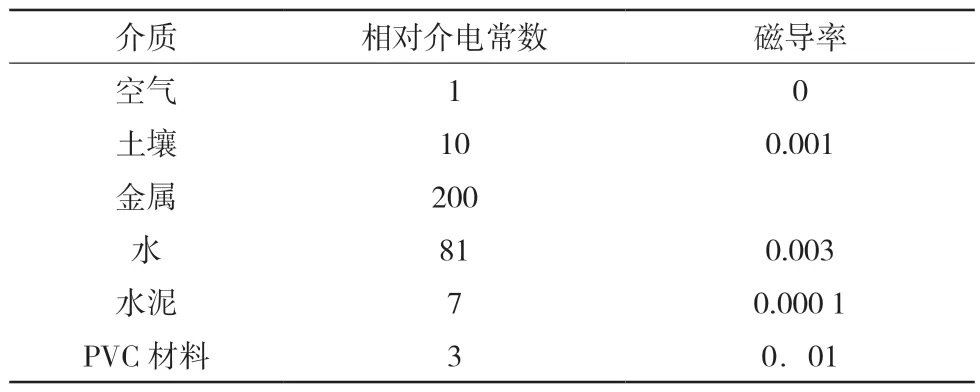
表1 介质参数表
如图8 所示,模型顶部介质为空气表示地表,两侧和底部是匹配吸收层(PML),用于去除有限差分法人工边界的反射,管道为厚度5 cm 的铸铁管,管道内部充满水。
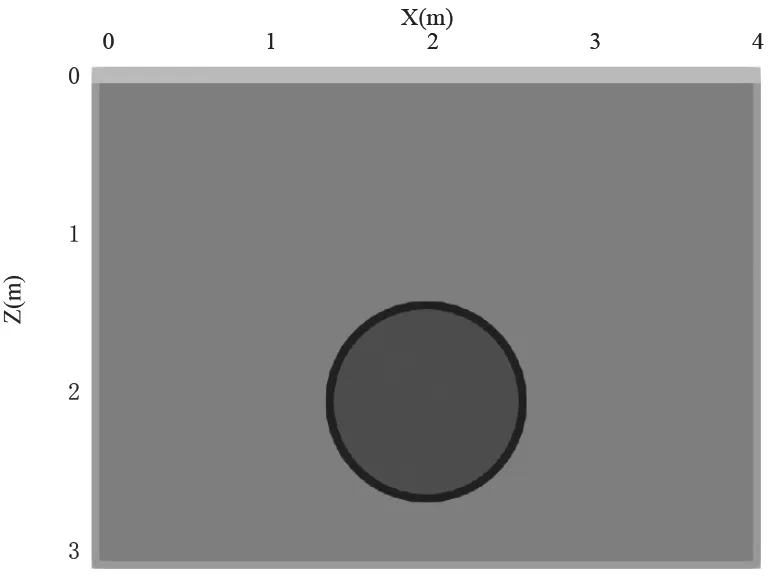
图8 DN1200 铸铁管模型图
如图9 和图10 所示,在35 ns 可以看到铸铁管对应的反射数据,地面回波占据了大部分能量。去除地面回波后,反射曲线更清晰,便于相位、振幅等的研究。
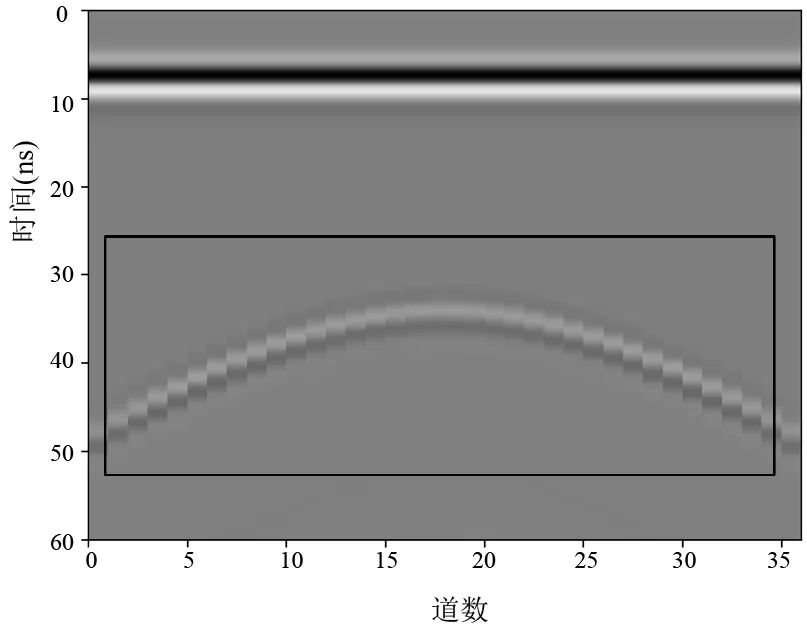
图9 DN1200 铸铁管正演模拟数据
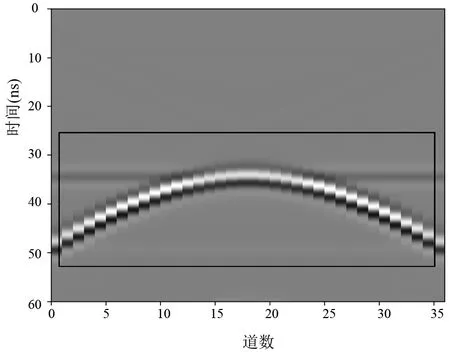
图10 DN1200 铸铁管去地面回波数据
再以PVC 材质的管线为例进行模拟,同时放置3 个不同深度的管线,对比深度对模拟数据的影响。如图11 所示。
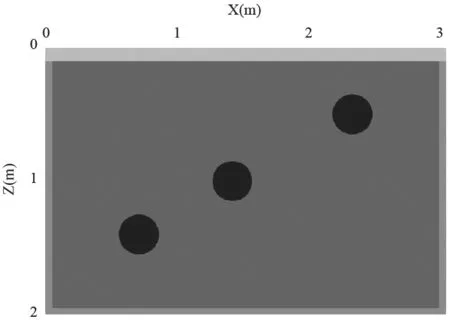
图11 DN300 PVC 模型图
设置模型大小为3 m×2 m,网格尺寸为0.005 m,时窗为60 ns,子波是主频200 MHz 的雷克子波,天线步进距离为0.05 m,介质参数见表1 所示。
如图12 和图13 中所示,A、B、C 分别对应不同埋深的PVC 管线的反射曲线,随着深度增加信号强度降低,同时出现了多次反射波。
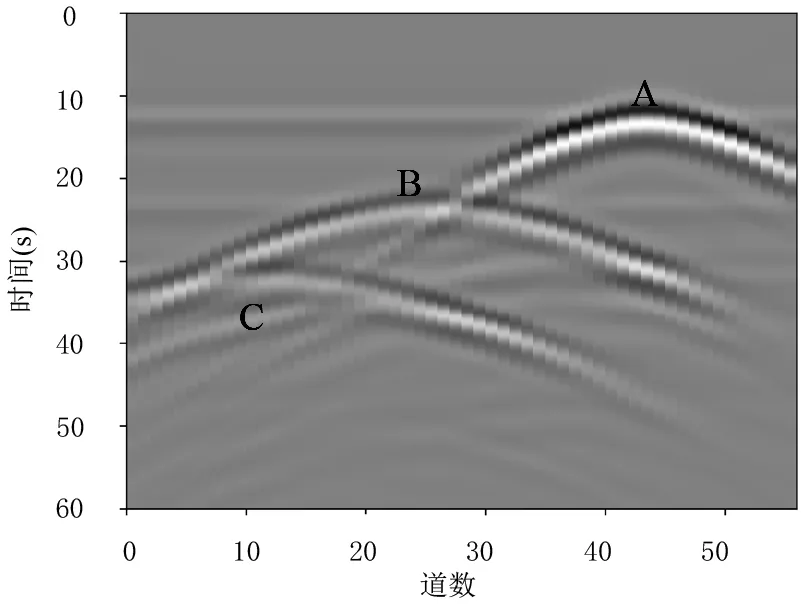
图12 DN300 PVC 管正演模拟数据
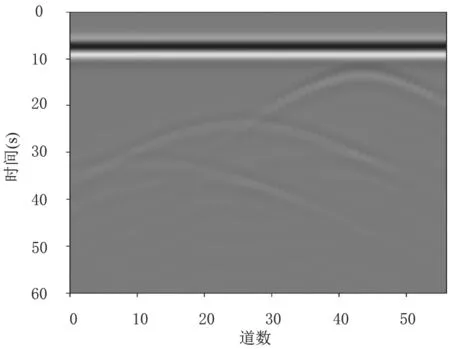
图13 DN300 PVC 管去地面回波数据
再以水泥管为例进行模拟,设置模型大小为6 m×3 m,网格尺寸为0.005 m,时窗为80 ns,子波是主频200 MHz的雷克子波,天线步进距离为0.1 m,介质参数如表1 所示。左侧管中为水,右侧管中为空气。如图14 所示。
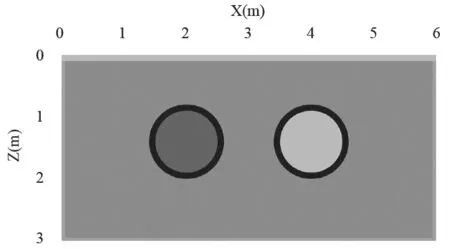
图14 DN1000 水泥管模型图
如图15 和16 中所示,充满水的管对应反射曲线为B,空管对应曲线为A。曲线B的强度相对较大,同时稍深位置产生了一个较弱的曲线C。在两个管之间产生了较为复杂的多次反射曲线D。
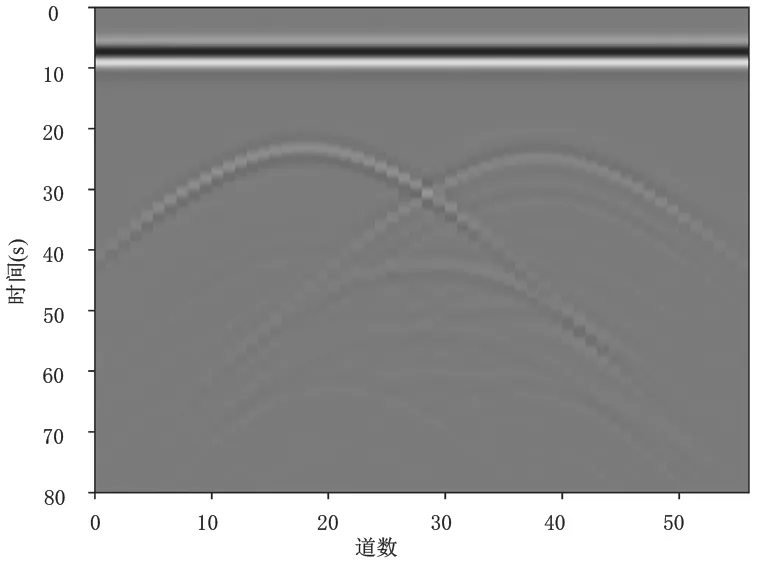
图15 DN1000 水泥管正演模拟数据
3.4 探地雷达的实际应用
以湛江市饮调水工程某测区内的DN1200 铸铁给水管为例,BS-M 探地雷达发射天线频率为200 MHz,相对介电参数为7,外业采集数据如图17,可以看到在深度约为1.4 m 处有明显的反射曲线。经过现场验证,判断为DN1200 的铸铁水管。
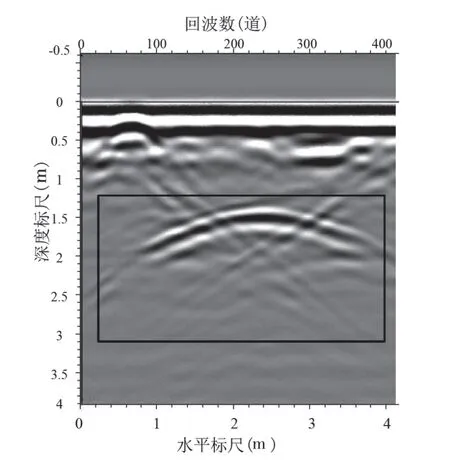
图17 DN1200 铸铁给水管探地雷达图像
该工程某测区有DN315 材质PVC 的燃气管,使用直连法无信号,推测示踪线被破坏。因此使用探地雷达探测,相对介电常数为10,采集的雷达数据如图18。可以看到在深度约为1.0 m 处有一曲线,沿着管线走向前后探测,确定该信号对应燃气管。
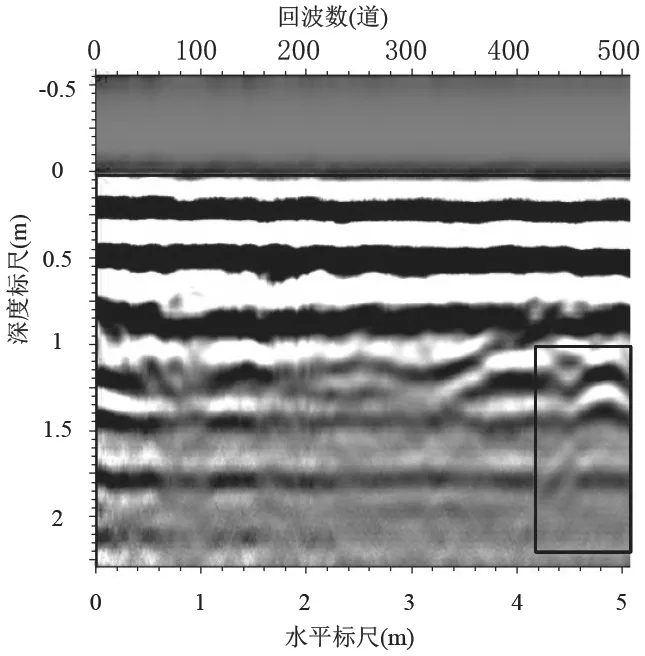
图18 DN315 PVC 燃气管探地雷达图像
该工程另一测区有DN1000 材质水泥的排水管,可直接开井探测。为了验证探地雷达信号,发射天线频率为200 MHz,相对介电参数为10,外业采集数据如图19。可以看到在深度约为0.7 m 处有一曲线,对应水泥管,与实际开井量测深度一致。
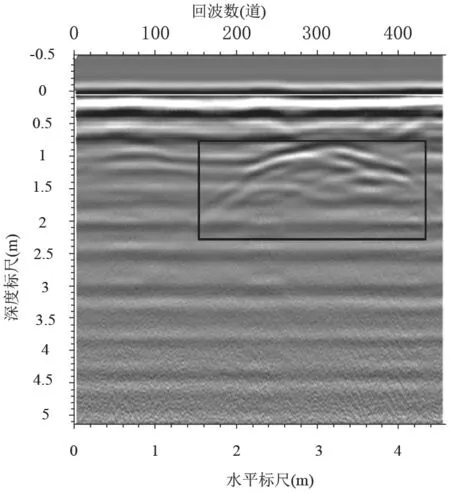
图19 DN1000 水泥排水管探地雷达图像
4 结束语
文章讨论了水利工程中地下管线探测的管线仪法和探地雷达法的探测原理、探测方法、数值模拟、实际应用等。对管线仪探测极大值法和极小值法产生误差的原因进行讨论,采用GprMax 软件对不同材质、管径、埋深、管内是否含水情况下的管线进行正演模拟,同时对3 个实地探地雷达数据进行讨论。给出以下建议:
(1)地下管线埋设情况多样,管线仪法和探地雷达法是获得地下管线信息的重要手段。管线仪法在金属管线探测方面优势较大,探地雷达法则弥补了非金属管线探测的不足,结合两者可以更好地服务地下管线探测。
(2)管线仪探测方法的选择取决于探测管线的材质和埋设情况,不同管线需选用不同的探测方法,具体情况具体分析。
(3)探地雷达是一种高效的探测方法,实测数据由于地面回波、场地不平整、噪声等影响,目标管线的反射曲线会被“压制、扭曲”等,不易识别。通过GprMax 软件正演模拟探地雷达的电磁波传播,可以研究不同地下情况的探地雷达信号,有利于实际数据的识别。
猜你喜欢
科技研究·理论版(2021年20期)2021-04-20
雷达学报(2021年1期)2021-03-04
中学数学研究(江西)(2020年5期)2020-07-03
中学数学研究(江西)(2019年11期)2019-12-31
通信电源技术(2018年3期)2018-06-26
科技风(2018年19期)2018-05-14
自动化学报(2017年1期)2017-03-11
电测与仪表(2016年17期)2016-04-11
通信电源技术(2016年5期)2016-03-22
华东理工大学学报(自然科学版)(2015年3期)2015-11-07
