
基于改进粒子群的时差测向最优阵列布局
2023-02-07 02:17:10蒋平屈秉男丁华泽马润泽何为
航空学报 2023年2期
蒋平,屈秉男,丁华泽,马润泽,何为,*
1.中国科学院 上海微系统与信息技术研究所 中国科学院无线传感网与通信重点实验室,上海 201800
2.上海科技大学 信息科学与技术学院,上海 201210
3.中国科学院大学,北京 100049
近年来,随着通信与传感器等技术的蓬勃发展,无线传感器网络被广泛应用到生活和工作[1]中。同时,因其隐蔽性高、作用距离远、适应性强[2-3]等优点,成为军事上的重要手段[4-5]。针对靶场试验场景下,弹丸落点的定位可有效衡量炮弹毁伤能力及作战准确度[6]。目前基于弹丸爆破产生的声震信号的落点定位方法可分成时差(Time Difference of Arrival,TDOA)定 位[7]和测向定位[3]等。其中,时差定位利用传感器阵元接收时间差通过双曲线定位法解算目标位置,该方法受各阵元时间同步、应用环境等因素限制,且当目标离阵列很远时,目标到阵列距离与各阵元到参考阵元间距离即阵列基线相差过大,难以通过双曲线方法准确定位目标坐标[8]。测向定位常通过频域波达方向估计[9]实现,但对于信号特性未知的情况效果不佳。此时,基于时差的测向技术因其复杂度低、设备简单、易于实现的特点而被应用于实际工程中[10]。
然而,在时差及测向定位中,声音或震动传感器阵列的布设对算法精度及分辨率具有一定影响,而阵列布设与传感器阵元数量及排布方式有关。传感器阵元数量过少时,会严重影响定位精度;数量过多时,则会影响成本和计算复杂度。排布方式不仅包括阵列形状,阵元间距亦是影响精度的因素。当阵元间距较小时,传感器接收信号时间精度受采集卡采样精度影响,导致时延误差增大;而阵元间距过大时,因受环境限制,信号采集过程中引入过多噪声,且布设实施难度增大。因此,对于靶场试验,针对目标可能出现在靶标附近的情况,对其附近区域范围构建合理有效的阵列布局,有望大大提升弹丸落点的定位精度。
目前,研究定位阵列布局方法可分为解析法和优化算法求解。解析法如文献[11-13]所述,均由理论推导获取阵列布局,且针对全方位区域定位,不具有区域针对性,对于有着特殊条件的目标区域不能得到最优阵列布局。而靶场试验中,目标范围是围绕靶标的特定区域,因此此类场景下的阵列布局往往难以通过解析法计算获得。故粒子群优化算法[14(]Particle Swarm Optimization,PSO)、遗传算法[15](Genetic Algorithm,GA)和差分进化算法[16(]Differential Evolution,DE)等智能优化算法被应用于阵列优化问题。另外,目前阵列优化研究大多基于时差定位[17-18]和测向交叉定位方法[2],基于时差测向的阵列优化研究相对较少。
总之,目前阵列优化研究大多集中于全向区域定位,针对靶场试验场景下特定区域的阵列优化研究甚少。同时,传统的粒子群优化算法易陷入局部最优,无法有效获得最优阵列布局。
针对以上问题,本文提出基于竞争策略和差分进化的改进粒子群优化算法(Particle Swarm Optimization with Competitive and Differential Evolution,PSO-CDE),提升粒子群优化算法的鲁棒性,并利用基于改进粒子群优化的时差测向阵列优化方法实现特定场景下的高精度阵列布局优化。结合实际场景构建仿真环境,验证本文算法的有效性,并针对阵列基线、阵元数量和时延误差展开研究。
本文的主要贡献包括:
1)提出基于竞争策略和差分进化的改进粒子群优化算法(PSO-CDE),提升场景适应度和鲁棒性,实现特定场景下的高精度阵列布局优化。
2)基于实际场景构建仿真环境,分析测向参数对最优阵列布局的测向精度影响,并验证本文算法的有效性。
1 时差测向阵列优化模型
1.1 系统架构
本文提出的基于改进粒子群的时差测向阵列优化系统用于工程实现,主要包括基于PSOCDE 的阵列优化和实际目标测向,其中基于PSO-CDE 的阵列优化过程包括时差测向模型和PSO-CDE 优化模型。系统整体流程见图1所示。
图1 基于PSO-CDE 的时差测向阵列优化流程图Fig.1 Flow chart of time difference direction finding array optimization based on PSO-CDE
如图1 所示,PSO-CDE 优化模型通过时差测向模型估计靶标散布范围内离散目标的方位角来计算适应度,并结合差分进化和竞争机制更新粒子群,实现种群更新,直到满足终止条件输出最优阵列布局。离散目标测向估计实现在给定靶标坐标、散布范围和清场范围时估计离散目标的方位角。其中散布范围指以靶标为中心弹丸落点理论上可能分布的范围,清场范围指在考虑弹丸出现异常情况下,落点可能存在的范围[5]。为了确保传感器的安全,阵列往往布设在清场范围之外。算法得到的最优阵列布局即为所需的特定目标测向环境下的测向精度最优的阵列布局。
实际测向过程包括弹丸声音或震动信号采集、信号处理及时延估计、时差测向算法估计弹丸方位角,这一部分本文不作赘述。
1.2 时差测向模型
假定在二维平面中,目标到传感器阵元间的信号波平行,目标坐标t=[xt,yt]T,阵元坐标sn=[xn,yn]T,n=0,1,…,N-1,并假定s0为参考阵元。目标与参考阵元的方位角为φ,如图2所示。波达方向(Direction of Arrival,DOA)单位矢量k表示为

图2 二维空间测向示意图Fig.2 Schematic diagram of direction finding in 2D space

式中:kx、ky分别为矢量k在x轴和y轴上的单位投影。
不失一般性,假定参考阵元s0不位于坐标系原 点。表示目标到达阵元之间的距离差,其值=|cτn0|,其中τn0为第n个阵元与参考阵元的到达时间差,c为信号波传播速度。因此TDOA的计算方程为

由于任意阵元与参考阵元的到达时间差与波速的乘积等于参考阵元到该阵元的矢量在DOA 矢量上的投影,式(2)可表示为

式中:τ=[τ10,τ20,…,τN-1,0]T表示所有到达时间差矢量;S=[s1-s0,s2-s0,…,sN-1-s0]T表示所有各阵元到参考阵元的差矢量的矩阵。
考虑实际场景中存在误差,TDOA 测向方程表示为


式中:W表示权重矩阵。当估计误差dτ统计特性已知的情况下,W为协方差矩阵;否则假定传感器阵元到达时间误差为独立同分布的高斯随机变量,其方差为,则dτ的方差为。因此W表示为[20]

式中:I为(N-1)×(N-1)的单位矩阵;1 表示值为1 的(N-1)×1 的列矢量。
根据式(1),方位角的估计值可以表示为

1.3 阵列优化目标函数
实际场景中传感器阵列可能受环境条件限制[21],只允许部署在一定空间区域内。考虑阵列布设的成本、难度等因素,传感器阵元之间的距离需要设置一定限制,相邻传感器的距离可表示为

式中:rnm表示第m个阵元和第n个阵元之间的距离。
因此优化阵列需要同时考虑阵元的空间区域约束和阵元间的距离约束,但算法的复杂度高。考虑到阵元间距离通过影响TDOA 误差来影响测向精度,而影响信号TDOA 误差的主要是基线长度。因此为了简化复杂度,本文考虑参考阵元的空间区域约束和基线约束,其他各阵元的位置坐标用参考阵元的位置坐标加上到参考阵元的距离rn0和角度θn0表示,所以阵元位置可约束为
式中:n=1,2,…,N-1;xmin和xmax分别为区域范围x坐标的最小值和最大值;ymin和ymax分别为y坐标的最小值和最大值;rmin和rmax为到参考阵元的距离范围;θmin和θmax为到参考阵元的角度范围;Ω为约束范围。
由于实际测量中无法预知目标位置,只能通过已知的散布范围内的离散目标来衡量时差测向精度。但不同位置的目标测向精度有差异,因此需保持粒子群进化过程中离散目标位置不变。本文通过散布范围内的均匀分布离散目标的均方误差来综合衡量测向效果。适应度函数表示为

式中:s为传感器位置;Nd为离散目标数量;MSEo(s)表示第o个离散目标与真实角度之间的均方误差,反映了该目标位置的测定结果的精度,具体公式为

式中:L为蒙特卡洛次数;为第o个离散目标的单次方位角估计值,由传感器位置s根据1.2节算法获得;φo为该离散目标的真实方位角。
基于位置约束和基线约束条件,并以均方误差为优化目标函数,测向阵列优化问题可描述为

式中:sopt为最优阵列布局,且在适应度函数f(s)最小值处取得。
2 改进粒子群算法
2.1 初始化种群
PSO 初始为一群具有随机速度和位置的粒子,通过迭代寻找最优解。假设D维搜索空间中,粒子群由M个粒子构成,那么第i个粒子的位置矢量可表示为

对于时差测向来说,N个阵元坐标位置的搜索需要2N维参数空间,因此D=2N。结合阵元的位置约束和基线约束,以参考阵元的坐标和各阵元与参考阵元的距离和角度作为粒子群的位置参数。因此结合式(9)和式(13),阵列优化时第i个粒子的位置矢量可以表示为

式中:xi,0和yi,0分别表示第i个粒子代表的阵列的参考阵元的x坐标和y坐标;ri,n0和θi,n0分别表示第i个粒子代表的阵列的第n个阵元与参考阵元的距离和角度;n=1,2,…,N-1。
传感器阵元限定在区域Ω内,可由式(9)确定参数矢量上限ub和下限lb,因此粒子初始化为

同样,第i个粒子的飞行速度也是一个D维矢量vi=[vi1,vi2,…,viD]。飞行速度的最大值影响当前位置和最优位置之间的精度,最大值过大容易越过最优解,但过小搜索空间不足容易早熟。因此需要结合粒子位置区域范围来确定粒子的飞行速度范围,飞行速度的初始化为

2.2 种群更新
根据粒子适应度更新个体最优p和全局最优g,从而更新粒子的速度和位置,具体更新公式[22]为

2.3 PSO 改进策略
2.3.1 差分进化
粒子群算法容易早熟,随着迭代次数增加,种群多样性减少,粒子群迅速向全局最优位置靠近,若此时全局最优位置为局部极值时,粒子群便易陷入局部最优。而差分进化在搜索的同时还保持种群多样性,具有较强的全局搜索能力。因此,融合差分进化策略能够提升粒子群的全局收敛能力。
差分进化包括变异、交叉和选择3 个步骤。变异操作是将种群中2 个随机个体的差矢量加权后与第3 个随机个体矢量相加获得变异个体,即

式中:qr1、qr2、qr3为种群中随机选择的3 个个体矢量,且r1≠r2≠r3≠i;hi为第i个变异个体矢量;F为缩放因子。
交叉操作是将原个体和变异个体按一定交叉概率进行参数混合组成交叉个体,即

式中:uij为第i个交叉个体的第j个参数;hij为第i个变异个体的第j个参数;qij为第i个原个体的第j个参数;i=1,2,…,M;j=1,2,…,D;r表示[0,1]内的随机数;cr∈[0,1]为交叉概率。
选择操作是选择本轮中交叉个体和原个体中适应度更优的个体进入下一轮迭代,即

2.3.2 竞争策略
为了进一步加强粒子群跳出局部最优的能力,增加粒子群的种群多样性,本文引入竞争策略[23],粒子群在合作寻找食物源的同时还存在竞争关系,强者占据适应度强的位置继续进化,弱者则去往其他环境寻找新的食物源,扩大种群的多样性。本文采取保留适应度较强的粒子,淘汰R个适应度差的粒子,并随机生成相同数量的粒子的竞争策略来提升粒子群寻优性能。当粒子群陷入局部最优时,利用随机粒子增加搜索空间,增加寻优能力。淘汰粒子数量越多,种群多样性越强,但数量过多时算法趋向随机搜索,没有有效利用粒子群数据。当淘汰粒子数量过少,算法跳出局部最优能力减弱。因此,选择合适的淘汰粒子数量能增强粒子群寻优能力。
2.3.3 基于PSO-CDE 的阵列优化算法
由于粒子群算法易陷入局部最优,利用差分进化和竞争策略增加粒子群种群多样性,增强粒子群寻优能力。为了增强粒子跳出局部最优的能力,根据粒子群适应度设定阈值,将种群划分为优等群、劣等群和淘汰群,适应度最好的优等群粒子按照差分进化策略更新,减少陷入局部最优的可能;适应度较差的劣等群粒子按照标准粒子群算法更新,迅速向最优粒子收敛;适应度最差的淘汰群粒子淘汰并随机生成,增加种群多样性。
使用PSO-CDE 优化测向阵列流程如图3 所示。具体步骤如下:
图3 基于PSO-CDE 的测向阵列优化流程图Fig.3 Flow chart of optimization of direction finding array based on PSO-CDE
步骤1 参数设定并初始化粒子群。确定种群规模M,淘汰数量R,迭代次数Nt,搜索空间维度D,每个维度的上下界,并利用式(15)和式(16)初始每个粒子的飞行速度vi和位置qi。
步骤2 计算每个粒子当前的适应度。
步骤3 更新个体最优值和全局最优值。将当前粒子的适应度分别与个体最优适应度和全局最优适应度比较并更新最优适应度与最优值。
步骤4 更新粒子的位置和速度。将适应度排序获得小阈值f1和大阈值f2。适应度<f1的粒子归为优等群按照差分进化策略更新粒子,适应度在f1和f2之间的粒子归为劣等群根据式(17)更新粒子的位置和速度,适应度>f2的粒子归为淘汰群淘汰并根据式(15)和式(16)随机产生位置和速度。
步骤5 算法终止。判断是否达到最大迭代次数或误差足够小,若满足则输出阵列布局,否则跳到步骤2。
2.3.4 复杂度分析
PSO-CDE 以迭代的方式寻求阵列最优布局,因此其复杂度与迭代次数Nt成正比。由测向阵列优化流程可知,PSO-CDE 每次迭代主要分为适应度求解、适应度排序分类和粒子矢量更新3 个步骤。
适应度求解的复杂度与粒子群的数量M、散布范围的离散目标数Nd、蒙特卡洛次数L和时差测向的复杂度C有关,因此粒子群的适应度求解的复杂度表示为Ο(MNdLC)。
适应度排序分类的复杂度主要与排序算法有关,本文选用基于二分思想的排序算法,复杂度为Ο(ηlog2η),其中η为排序元素长度。而排序复杂度由粒子群数量M决定,因此适应度排序复杂度表示为Ο(Mlog2M)。
粒子矢量更新分为经典粒子群算法更新矢量、差分进化算法更新矢量和淘汰初始化更新矢量3 种方式,但本质均是对矢量中的参数的更新处理,因此这部分复杂度由粒子群数量M和粒子矢量参数维度D决定,可表示为Ο(MD)。
因此本文提出的基于PSO-CDE 的阵列优化算法复杂度为Ο(Nt(MNdLC+Mlog2M+MD))。
3 实验结果与分析
3.1 仿真环境
本文使用MATLAB2019b 进行仿真实验,仿真结果均在配备3.0 GHzCPU 和8 GRAM 的计算机得到。为了验证本文方法的有效性,针对靶场试验场景,构建基于时差测向系统的弹丸目标检测仿真环境,验证本文阵列布局优化算法对该场景的优化效果。通过对最优阵列和规则阵列的测向比较,验证其测向效果。同时以散布区域内均方误差作为目标函数,研究各参数对时差测向效果的影响。
靶场弹丸散布范围一般为以靶标为圆心,散布半径为Rs的圆,清场范围则指包含所有散布范围,考虑弹丸可能落点的Lx×Ly的矩形。图4 表示靶场中弹丸散布和清场范围,圆心表示靶标所在位置,圆表示弹丸散布范围,矩阵表示靶场试验弹丸落点的清场范围。
图4 弹丸散布和清场范围Fig.4 Projectile distribution and clearance range
如图5 所示,设定清场范围为600 m×600 m的矩阵,图中表示为虚线区域,其区域的取值范围可表示 为{x∈[100,700] m,y∈[100,700] m }。设定传感器布设区域范围为100 m×100 m,图中表示实线方形区域,其中参考传感器所在区域取值范围为{x∈[-50,50] m,y∈[-50,50] m }。靶标数量为5,其坐标如表1 所示。散布范围半径设定为20 m,图中表示为圆形区域。同时考虑采集卡的采样率限制,传感器阵元间距离过近,难于分辨时延,因此控制基线约束为ri0∈[3,10] m,时延误差为1 ms。
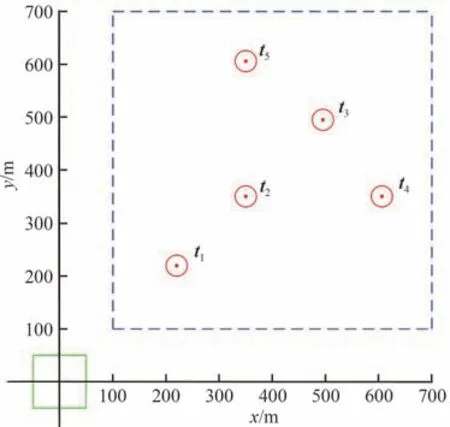
图5 仿真环境Fig.5 Simulation environment
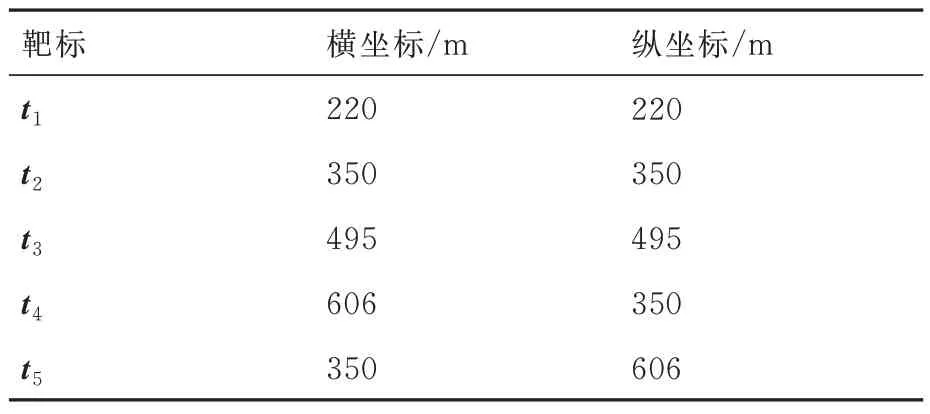
表1 仿真环境靶标坐标Table 1 Simulation environment target coordinates
3.2 改进粒子群性能
为了验证PSO-CDE 的寻优性能,选用Rastrigin、Rosenbrock 这2 个经典的测试函数进行测试并分析其原理。PSO-CDE 参数设置为种群数量M=50,惯性权重ω由0.9 线性减小到0.4,优化参数维度D=10,迭代次数为10 000,缩放因子F=0.5,交叉概率cr=0.3。用PSO[2]、DE、仅基于差分进化的PSO 算法(Differential Evolution Particle Swarm Optimization,DEPSO)、仅基于竞争策略的PSO 算法(Competitive Particle Swarm Optimization,CPSO)、文献[21]中改进PSO 算 法(Improved Particle Swarm Optimization,为了与其他改进粒子群算法进行区分,本文简称IPSO1)、文献[22]中改进PSO 算法(本文简称IPSO2)和本文提出的PSO-CDE 算法优化测试函数,分别运行50 次记录2 个测试函数的适应度平均值、最优值、最差值和方差,比较各算法的优化性能和鲁棒性。
Rastrigin 测试函数优化结果如表2 所示,Rastrigin 函数为
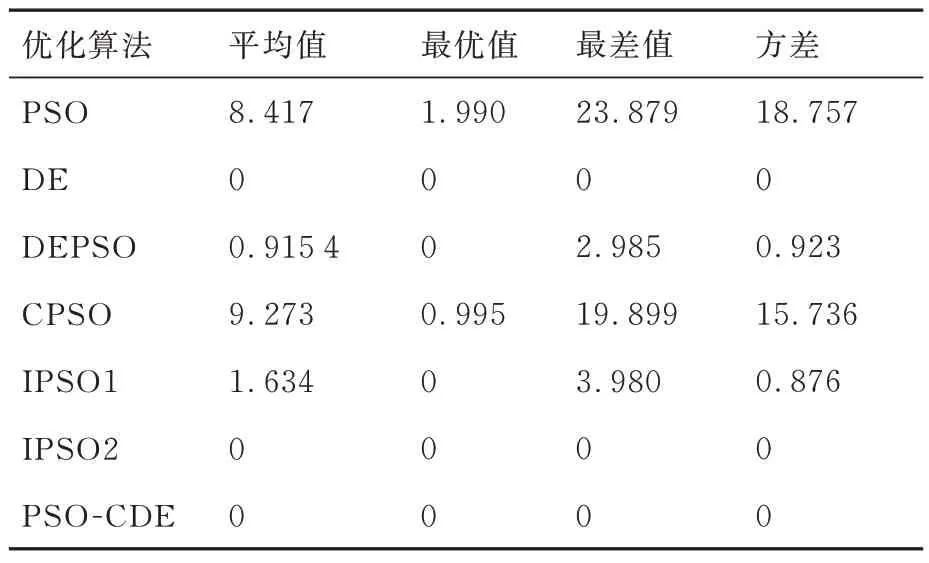
表2 Rastrigin 测试函数优化结果Table 2 Rastrigin test function optimization results

式 中:x=[x1,x2,…,xd];xi∈[-5.12,5.12];d表示变量参数x的维度;最优值0 在x=[0,0,…,0]处取得。
Rosenbrock 测试函数优化结果如表3 所示,Rosenbrock 函数为
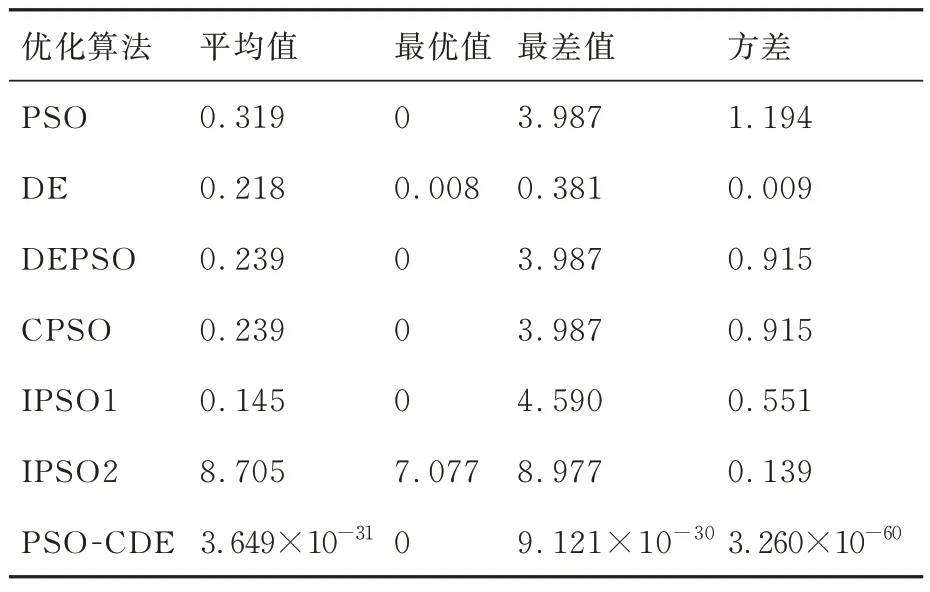
表3 Rosenbrock 测试函数优化结果Table 3 Rosenbrock test function optimization results

式 中:x=[x1,x2,…,xd];xi∈[-2.048,2.048];d为变量参数x的维度;最优值0 在x=[0,0,…,0]处取得。
从表2 和表3 可以看出PSO 算法优化Rastrigin 函数时平均值≫0,容易陷入局部最优,无法寻到最优值,而Rosenbrock 函数优化结果方差较大,算法表现不稳定。DE 算法对Rastrigin 函数的优化效果可以达到最优,但对Rosenbrock 函数优化效果不佳,且收敛速度过慢,仿真实验中10 000 次迭代仍未达到最优结果。同时,仅引入差分进化的DEPSO 测试结果较PSO 有一定的提升,改善了PSO 的寻优能力和鲁棒性。同样地,单独引入竞争策略的CPSO 稍微改善PSO 优化结果,但跳出局部最优能力仍然较弱,且鲁棒性较差。IPSO1 在2 种测试函数中均有取到最优值,但从方差可以看出鲁棒性较差。而IPSO2 在Rastrigin 函数表现最优,但在Rosenbrock 函数表现最差,适用环境存在限制。实验中PSO-CDE在2 种测试函数中的平均值分别达到0 和3.649×10-31,表明在2 种测试函数的优化测试均取得了较好的效果。同时两者的方差也达到0和3.260×10-60,表明PSO-CDE 鲁棒性高。因此,本文提出的PSO-CDE 能够提升PSO 的优化效果与鲁棒性。
如上述2 个测试函数所示,传统PSO 算法通过迭代学习个体最优位置和全局最优位置来更新粒子速度和位置,因此当全局最优位置并非最优解时,结果易陷入局部最优,优化性能并不完美。DE 算法通过变异、交叉、选择来全局搜索最优解,但当适应度计算复杂时运行时间较长。因此可结合差分进化来改善PSO 算法,选取一部分粒子通过差分进化的方式对位置矢量进行更新,改变粒子原有的运动轨迹,从而更新全局最优位置。而本文提出的PSO-CDE 在结合差分进化的粒子群的基础上加入竞争策略,在种群进化过程中,淘汰适应度差的粒子,生成新的粒子增加种群多样性。同时,竞争策略给差分进化提供新的种群粒子,有利于进化出适应度更优的粒子,进一步增加了跳出局部最优的能力。
3.3 阵列布局优化
3.3.1 阵列优化性能
为了验证PSO-CDE 在测向阵列优化场景下能提高PSO 的优化能力,将PSO-CDE 算法与3.2 节所提的PSO、DE、DEPSO、CPSO、IPSO1和IPSO2 多次测定比较其适应度的均值、最优值、最差值和方差。通过均匀分布在散布范围内的500 个目标来计算适应度,设置传感器阵元数量N=5,优化参数维度D=10,迭代次数为500,其他条件不变,运行30 次比较PSO-CDE 和其他算法的优化效果。表4 为时差测向阵列优化结果。
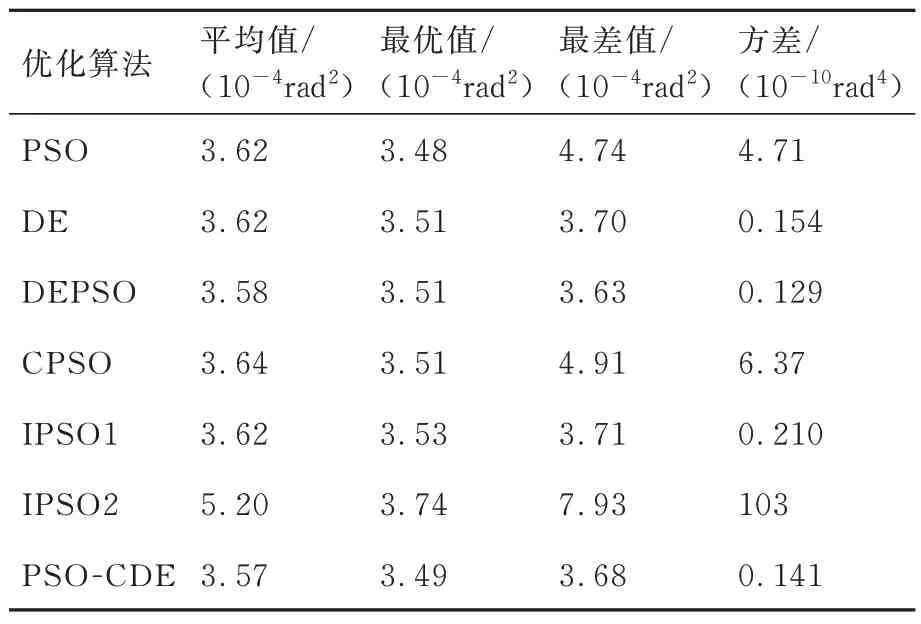
表4 阵列优化结果Table 4 Array optimization results
从表4 可以看出PSO-CDE 算法的优化效果最优,DEPSO 其次,IPSO2 最差。PSO 的平均值和方差较大,表明PSO 的优化性能一般,且鲁棒性较差,易陷入局部最优。DE 算法的鲁棒性较强,但收敛较慢,同时该场景下适应度计算时间较久,故耗时过长。IPSO1 一定程度上提高了PSO 的鲁棒性,但寻优能力不足。而IPSO2 均值和方差均为最大,说明该算法在该场景下性能不佳。DEPSO 提升了PSO 的优化能力和鲁棒性,而PSO-CDE 则在该场景下进一步提升优化性能。因此比较各算法的平均值和方差,验证PSO-CDE 测向精度最优,鲁棒性强,验证基于时差测向的目标检测场景中,本文算法的优化策略可有效提供最优阵列布局。在靶场试验高精度测向要求下,PSO-CDE 优化阵列的测向精度比PSO 算法结果提升了1.4%,并拥有较好的鲁棒性,可稳定获得高精度的阵列布局,因此本文提出的PSO-CDE 算法更适用于该场景。
选择优化性能较好的DEPSO、PSO1、PSO2、传统PSO 和本文提出的PSO-CDE 算法,记录其适应度变化,结果如图6 所示。图6 为测向阵列优化过程中迭代500 次后各算法适应度曲线随迭代次数变化记录图。
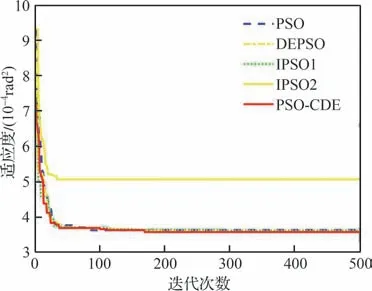
图6 阵列优化过程中的适应度曲线Fig.6 Fitness curves during array optimization
从图6 可以看出,所有算法适应度曲线在50次内迅速下降,在经过300 次迭代适应度曲线趋于平缓,说明优化结果基本收敛,PSO-CDE 此时优化结果可以认为最优阵列布局。粒子群初期全局搜索能力通常较强,可迅速寻找较优位置,因此适应度曲线呈现迅速下降趋势。随后通过局部搜索寻求更优位置,曲线便呈阶梯式下降趋势。此时若寻优能力较弱,可能存在陷入局部最优的情况。因此需要增强粒子群跳出局部最优的能力。DEPSO 则一定程度上改善了PSO 陷入局部最优的缺点。而本文提出的PSO-CDE 结合差分进化和竞争策略增加种群多样性,进一步搜索最优阵列布局,从而提高粒子群寻到全局最优的能力,因此适应度曲线迭代次数为50~300 时呈现缓慢的下降趋势。
3.3.2 阵列测向性能
为了验证优化阵列的测向效果,通过均匀分布在散布范围内的500 个目标求解最优阵列,并用随机分布在散布范围内的500 个目标的均方根误差验证该方法的测向效果。同时,选取十字阵列[24]、爪字阵列[12]及本文算法优化后的阵列对目标测向结果对比分析,验证本文优化阵列对目标测向精度的影响。
为了排除阵列位置对不同阵列的影响,所有阵列的参考传感器固定为坐标原点。将参考点固定用PSO-CDE 求解最优阵列,得到阵列布局如图7(a)所示。图7(b)和图7(c)为十字阵列和爪字阵列布局,其坐标如表5 表示。可以看出,优化阵列的阵元基线长度基本达到最大值。

表5 不同阵列布局坐标Table 5 Different array structure coordinates
在该场景下的散布范围内随机分布目标源,以不同阵列下估计方位角的均方根误差作为衡量测向效果的标准,将优化阵列的测向结果与十字阵列和爪字阵列的测向结果比较,验证优化阵列能够提高测向精度。图8 是3 种阵列在该场景下对5 个靶标散布范围内随机目标估计方位角后得到的均方根误差。
由图8 可知,在其他条件一定时,优化阵列的均方根误差最小,十字阵列其次,爪字阵列最大。说明本文的优化方法能够减小方位角的均方根误差,提高测向精度。由于测向精度与阵列获取的目标信息有关,不同位置获得的信息不同,信息越丰富,测向精度越高[24]。结合图7 可以得知优化阵列所在位置面向检测范围更广阔,获取的目标信息更全面,而爪字阵列的目标信息较十字阵列更少,因此测向精度不如十字阵列。
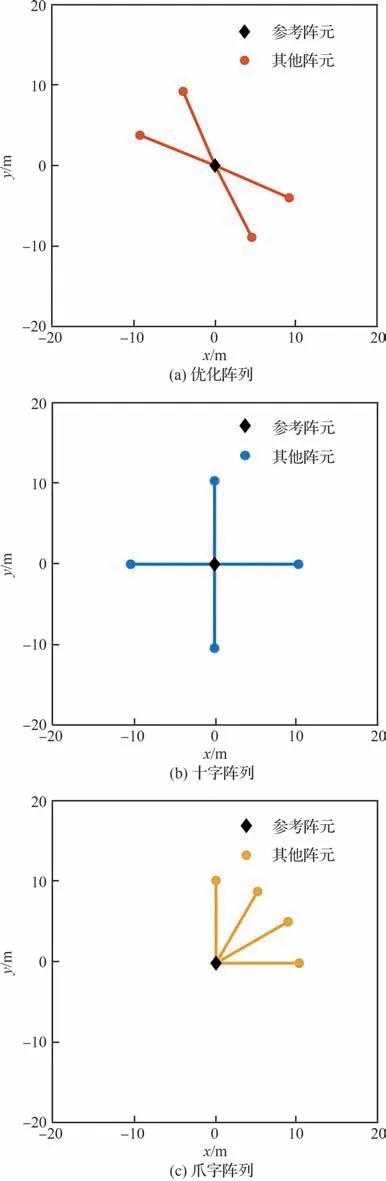
图7 不同阵列布局Fig.7 Different array structures
另外,可从图8 中看出目标位置对十字阵列和爪字阵列的测向精度的影响较小。对比目标散布示意图5,本文优化阵列在同角度目标t1、t2、t3处的测向精度相差较小,在不同角度下的目标t3、t4、t5测向精度影响较大,说明本文优化阵列的目标测向精度受目标的角度分布影响较大。
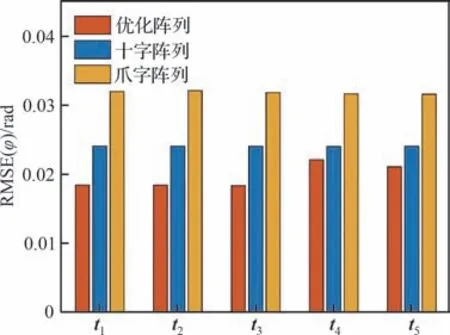
图8 不同阵列布局对测向精度的影响Fig.8 Influence of different array structure on direction finding accuracy
3.4 测向精度
3.4.1 阵列基线对测向精度的影响
阵列基线是阵列布局的重要参数之一,能够影响测向精度。研究阵列基线对测向精度的影响,控制其他条件不变,改变基线长度的约束,控制参考阵元到各阵列间距离最大值实现对基线的调整。
当阵元间距离最大值由5 m 增加到50 m时,目标测向均方根误差结果如图9 所示。通过结果比较可以看出,当基线长度增加时,测向均方根误差也随之降低,但降低速度逐渐平缓。同时,基线的增加会加大工程布设的成本和难度,所以需要针对工程的需要,选择合适的基线长度,长度过短将达不到测向精度要求,过长测向精度提升有限而布设成本增加。故选用基线长度为30 m 左右更适合靶场试验的高精度需求。

图9 阵元基线对测向精度的影响Fig.9 Influence of element baseline on direction finding accuracy
3.4.2 阵列传感器数量对测向效果的影响
不仅阵元基线对测向精度产生影响,传感器的数量同样会对测向精度有影响。仿真研究最优阵列中阵元数量对测向精度的影响,控制时延误差、目标源区域不变,比较不同阵元数量优化的阵列的均方根误差。
设定阵元数量范围为3~12,阵元数量对测向精度的影响结果见图10。由图10 仿真结果可知,阵元数量对测向精度影响较大。当阵元数量的增加时,均方根误差随之降低,但降低的速度逐渐变慢。阵元数量越多,获取信号信息越丰富,测向效果越好,但随着阵元数量的增加,阵列结构更加复杂,布设难度增加,计算复杂度更高。因此,衡量测向效果及算法成本等多项指标,在该应用环境中布设10 个阵元数量更加合适。
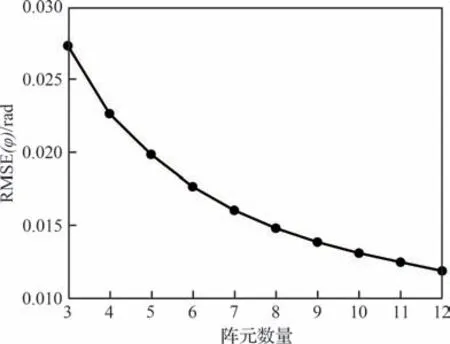
图10 阵元数量对测向精度影响Fig.10 Influence of number of array elements on direction finding accuracy
3.4.3 时延误差对测向效果的影响
为了研究时延误差对优化阵列测向精度的影响,在阵列布局、阵元数量确定的情况下,控制高斯随机误差从0.1~1 ms 和1~10 ms 2 个级别求均方根误差,比较时延误差对不同阵列测向结果产生的影响,结果如图11 所示。
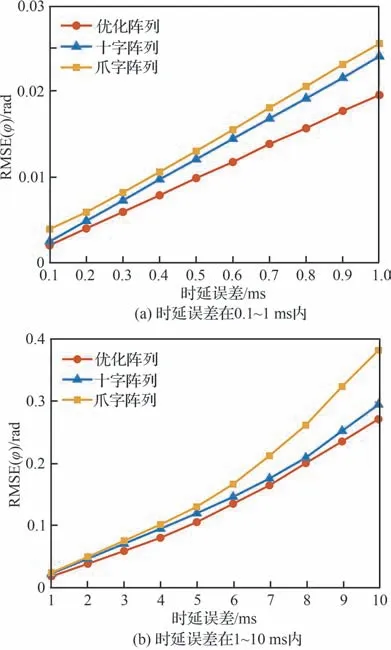
图11 时延误差在0.1~1 ms 和1~10 ms 内对不同阵列测向影响Fig.11 Influence of time delay error on direction finding of different arrays within 0.1~1 ms and 1~10 ms
从图11 中可看出,时延误差一定时,优化阵列的测向精度均优于另外2 种阵列。由3.3.2 节分析可知,爪字阵列位置所获目标信息较另外2 种阵列最少,因此测向精度表现最差。而且三者之间的差距均随时延误差的增大而增大。可以进一步证明优化阵列有着更优的测向效果,验证了PSO-CDE 可以实现时差测向的最优阵列布局。同时,在2 种级别的时延误差范围,优化阵列的测向RMSE 与时延误差基本成线性增加关系,因此实际中可控制时延误差来提高测向精度。
3.5 靶场试验
为了进一步验证本文提出的基于PSO-CDE的阵列优化算法的性能,选择真实靶场环境弹丸爆破试验比较。试验靶场为空旷平坦戈壁,按地理正东方向建立x轴,地理正北方向建立y轴,阵列中心位于[100,100] m 附近,并选取5 个位置点作为弹丸爆破靶标,其靶场布局及弹丸落点如图12 所示。表6 为选取的靶标位置坐标表示。
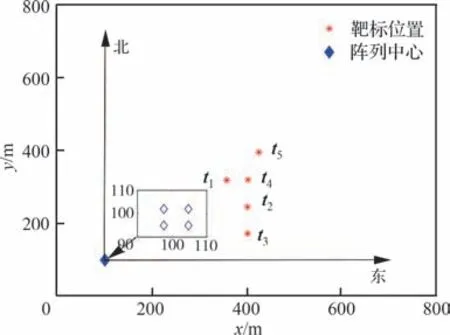
图12 靶场弹丸落点示意图Fig.12 Diagram of projectile landing points in range
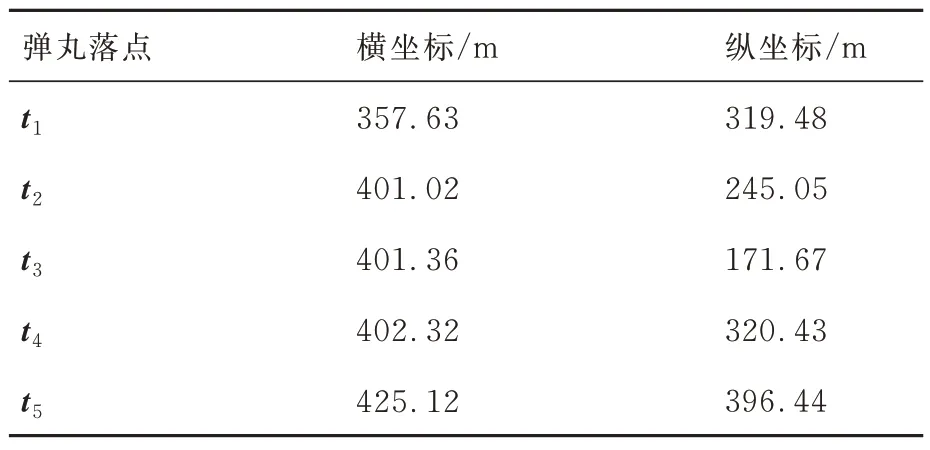
表6 弹丸落点坐标Table 6 Coordinates of projectile landing points
靶场实弹试验时选用四元十字阵,如图12 所示,阵列基线长为5 m,其布设位置坐标分别为[97.654 5,94.974 5] m、[97.654 5,102.045 5] m、[104.725 5,102.045 5] m、[104.725 5,94.974 5] m。
为了保证优化阵列的场景适应性,保持靶场中其他条件一致,同样设置阵元数量为4,最大基线长为5 m,参考阵元固定在[100,100] m 处,在不同时延误差下进行最优阵列布局的求解。在不同时延误差条件下,将优化后的阵列对目标的测向精度与四元十字阵的测向精度进行比较分析,结果如图13 所示。
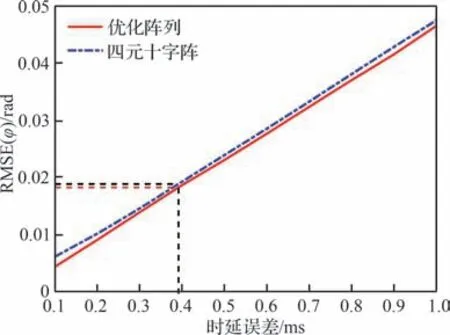
图13 2 种阵列不同时延误差下的测向精度RMSEFig.13 RMSE of direction finding accuracy of two arrays with different time delay errors
由图13 可得,在时延误差控制在1 ms 范围内,对应求解的最优阵列布局对目标的测向误差均低于四元十字阵的测向误差,优化阵列的测向精度总体可提升6%。同时,在实际靶场中四元十字阵对42 发实弹的测向精度为0.019 rad[5],对应图13 中的时延误差约为0.39 ms。参考实际靶场环境下的时延误差,可以推断在该时延误差条件下,本文解得最优阵列对42 发实弹测向精度可保持在0.018 rad。在该条件下优化得到的阵列布局如图14 所示。
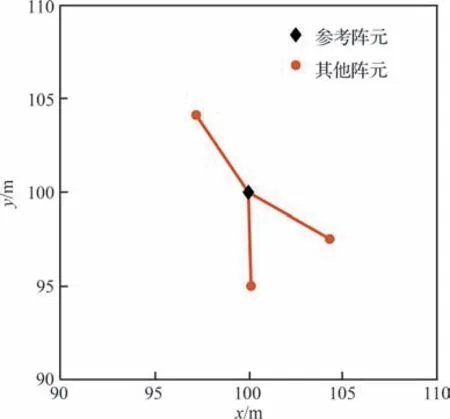
图14 优化阵列示意图Fig.14 Schematic diagram of optimized array
因此,本文基于PSO-CDE 的阵列优化布局对目标测向精度优于四元十字阵,有望提升实际靶场环境下对实弹目标的测向精度,可以为外场阵列布局策略提供一定的参考依据。
4 结论
本文提出了一种在特定场景下的时差测向阵列优化算法,该方法基于PSO-CDE 实现对阵列布局的优化。构建特定靶场仿真环境,以测向均方误差作为适应度函数,构建以位置约束和基线约束的阵列参数形式,并采用竞争策略和差分进化策略提高粒子群种群多样性和鲁棒性。通过仿真对比分析,验证PSO-CDE 算法在时差测向场景有着更高的阵列布局优化性能和算法鲁棒性。研究阵元基线、阵元数量和时延误差对测向效果的影响,为实际环境中高精度测向阵列策略选取提供参考。
猜你喜欢
小学生作文·小学低年级适用(2024年11期)2024-12-31 00:00:00
计算机仿真(2022年8期)2022-09-28 09:53:02
军民两用技术与产品(2022年7期)2022-08-06 07:19:14
军事文摘(2021年15期)2021-08-11 13:01:12
高技术通讯(2021年3期)2021-06-09 06:57:46
科学(2020年5期)2020-11-26 08:19:14
测控技术(2018年3期)2018-11-25 09:45:50
舰船电子对抗(2016年5期)2016-12-13 08:41:14
中国塑料(2016年11期)2016-04-16 05:26:02
航天器工程(2014年5期)2014-03-11 16:35:50
