
一种双向平板折展单元机构及其运动过程分析
2023-02-07 02:17:22陈博郭路瑶梁宝柱姜泽李明许允斗赵永生
航空学报 2023年2期
陈博,郭路瑶,梁宝柱,姜泽,李明,许允斗,2,*,赵永生,2
1.燕山大学 河北省并联机器人与机电系统实验室,秦皇岛 066004
2.燕山大学 先进锻压成型技术与科学教育部重点实验室,秦皇岛 066004
3.中国航天科技集团有限公司 空间结构与机构技术实验室,上海 201109
4.上海宇航系统工程研究所,上海 201109
随着航天事业的发展,为了满足不同航天任务的需要,各种类型的空间可展开结构得到了迅速的发展和应用[1]。同时,面对未来更加复杂的航天任务[2],对大型、高精度、高刚度、高稳定性和轻量化的空间可展开结构的需求越来越迫切。
空间可展开天线的典型应用包括环形天线、构架式天线、平面天线、肋式天线和张拉式天线[3-10]。目前,对平面天线的研究相对较少。平面可展开天线是星载可展开天线的一个重要分支。为了完成更复杂的航天任务,需要其具备一个大的物理口径,可以达到几十到几百平方米[11]。由于火箭整流罩的空间限制以及航天器编队飞行和在轨装配技术的不成熟,利用折展机构实现收拢和展开成为了一种更具吸引力的解决方案[12]。1978 年,美国宇航局成功发射了人类历史上第一颗合成孔径雷达卫星SeaSat,该卫星基于六角棱锥机构单元之间的剪切同步机构,实现了10.7 m×2.2 m,1/8 收纳比[13];1991 年,欧空局发射的ERS-1 配备了10 m×1 m 尺寸,1/2收纳比的SeaSat 天线折展机构改进版[14];加拿大航天局于1996 年成功发射的RadarSat-I 卫星上配置有15 m×1.5 m 尺度,1/2 收纳比的折展机构[15],通过改变了拓扑结构,有效地提高了性能,在2007 年发射的Radarsat-II 卫星上也实现了15 m×1.5 m 尺寸和1/2 收纳比的平面天线[16]。综合上述,目前平面天线一般采用单向折展机构,折叠和展开运动都发生在同一正交面内[17],没有在与其正交的第二方向存在折叠与展开运动,即没有双向折展机构,因此无法满足更大的物理口径需求。
基于四棱锥和三棱锥机构,提出了一种6 自由度双向可展单元机构,阐述了双向平板折展单元机构及模块化组成原理,基于闭环矢量法[18-22]建立了机构运动学模型,并进行了理论分析与仿真校验。
1 机构组成与拓展规律
1.1 双向平板折展单元机构及其展开过程
双向平板折展单元机构的组成如图1 所示,主要由天线面板、竖向支撑机构与横向支撑机构等部件组成。其中,包括沿x-y方向分布的第1 排天线平板和第2 排天线平板;第1 排天线平板和第2 排天线平板均包括3 个依次沿y-z方向分布的天线平板;第1 排天线平板中的3 个天线平板和第2 排天线平板中的3 个天线平板分别通过1 个竖向支撑机构连接,且2 个所述竖向支撑机构关于双向平板折展单元的原点对称,第1 排天线平板通过横向支撑机构与第2 排天线平板连接。支撑机构的主要部件为支撑杆、厚度补偿块、自锁铰链、辅助支撑杆和连接杆。双向平板折展单元机构包括6 块天线平板、2 个竖向支撑模块和4 个横向支撑模块。对于该支撑机构而言,包括大量杆件配合,在位形约束的基础上实现运动功能。
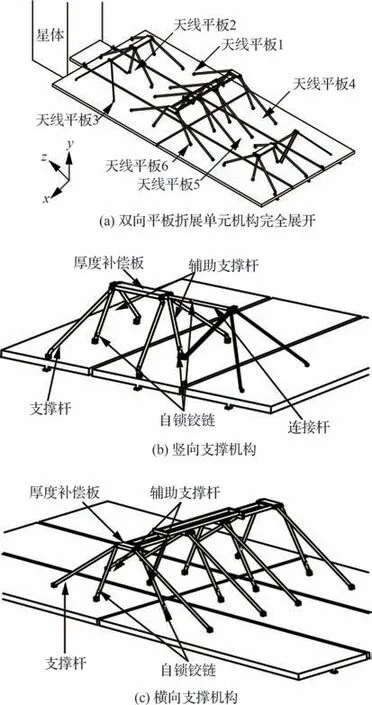
图1 双向平板折展单元机构组成Fig.1 Composition of two-way flat plate folding unit mechanism
双向平板折展单元机构的工作过程:在运动过程中,机构虽然是三维空间机构,但机构是分为竖向展开和横向展开的独立的时序运动,双向平板折展单元机构的展开过程如图2 所示。机构从折叠状态出发,首先进行x-y平面的竖向展开,竖向支撑机构上的转动铰接点均只在此平面内运动;接着进行y-z平面的横向展开,横向支撑机构上的转动铰接点均只在此平面内运动。机构运动至完全展开状态时,竖向、横向支撑机构中的辅助支撑杆共线。

图2 双向平板折展单元机构展开过程Fig.2 Unfolding process of two-way flat plate folding unit mechanism
1.2 模块化组成原理
研究的双向平板折展天线机构,包括至少2 个上述的双向平板折展单元机构,双向平板折展天线机构沿x-y方向拓展。折展单元包含了6块天线面板,双向平板折展天线机构沿x-y方向拓展时,第N个单元的天线平板5 和天线平板6,分别作为第N+1 个单元的天线平板1 和天线平板2,如图3 所示。双向平板折展单元机构的展开过程如图4 所示。为实现更大物理口径,按照此规律在x-y方向拓展即可。

图3 多单元展开机构构型原理图Fig.3 Schematic diagram of multi-unit deployment mechanism configuration
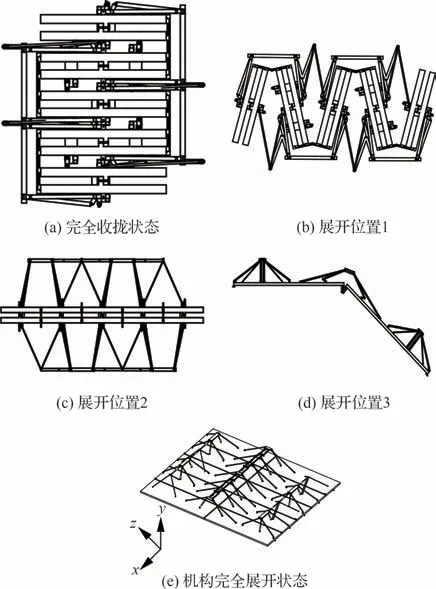
图4 多单元双向平板折展天线机构展开过程Fig.4 Deployment process of multi element bidirectional flat plate folding antenna mechanism
2 机构的自由度分析与驱动选择
2.1 机构的自由度分析
双向平板折展单元机构展开过程分为两步,第1 步是x-y平面竖向展开,第2 步是y-z平面横向展开。这些展开过程是相互独立的,故在此对竖向支撑机构和横向支撑机构自由度是分别求解。
2.1.1 竖向支撑机构自由度
竖向支撑机构可以简化为在x-y平面内的平面机构,如图5 所示,直接利用平面机构的计算公式,可以得到竖向支撑机构的自由度,有
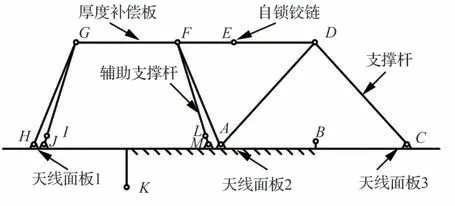
图5 竖向支撑机构简图Fig.5 Schematic diagram of vertical support mechanism

式中:n1为构件数;p1为铰链数。
2.1.2 横向支撑机构自由度
横向支撑机构可以简化为在y-z平面内的平面机构,如图6 所示,直接利用平面机构的计算公式,可以得到横向支撑机构的自由度,有
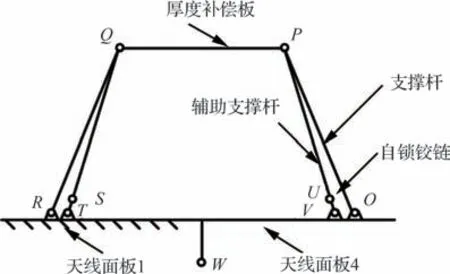
图6 横向支撑机构简图Fig.6 Schematic diagram of transverse support mechanism

式中:n2为构件数;p2为铰链数。
2.1.3 单元机构自由度
由于整个可展开天线存在2 个竖向支撑机构,且两者关于原点对称,在竖向展开时,天线面板1 和4、天线面板2 和5、天线面板3 和6 分别可视为一个整体,由此,竖向展开的2 个支撑机构展开的自由度为4,再结合横向展开的支撑机构展开的自由度为2,则可展开天线完全展开的自由度为6。
2.2 机构的几何尺寸
如图5 和图6 所示的机构简图,当天线面板的尺寸给定以后,厚度补偿板的长度可确定,铰接点A、C、H、O、R均位于天线面板长边的中点位置,可以改变的参数有支撑机构的高度和支撑杆的长度。图7 为竖向支撑机构的展开和折叠状态,其中参数满足式(3),图8 为横向支撑机构的展开和折叠状态,其中参数满足式(4)。
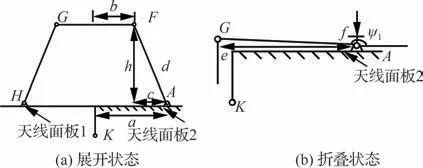
图7 竖向天线支撑机构简图Fig.7 Schematic diagram of vertical antenna support mechanism
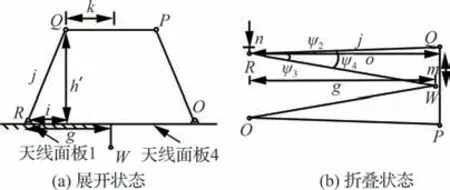
图8 横向天线支撑机构简图Fig.8 Schematic diagram of transverse antenna support mechanism

式中:a=675 mm 为完全展开状态,铰接A、K水平距离;b=365 mm 为完全展开状态,铰接G、F水平距离的一半;c=310 mm 为完全展开状态,铰接A、F水平距离;d=820.34 mm 为完全展开状态,铰接A、F距离;e=820.33 mm 为完全折叠状态,铰接A、G水平距离;f=5 mm 为完全折叠状态,铰接A、G竖直距离;h=759.52 mm 为完全展开状态,铰接A、F竖直距离;ψ1为完全折叠状态,杆件AG与水平方向的夹角。
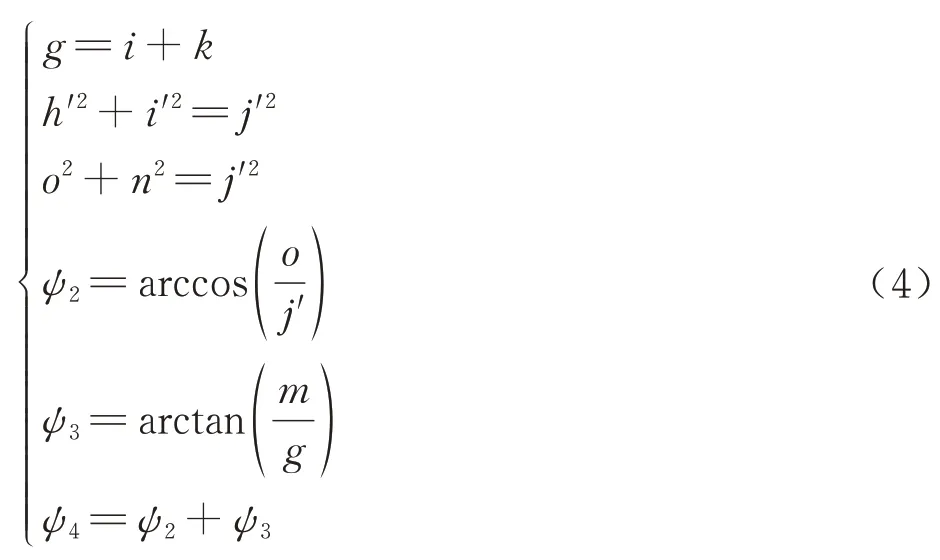
式中:g=1 797.5 mm 为完全展开状态,铰接R、W水平距离;i'=1 601.5 mm 为完全展开状态,铰接Q、R水平距离;j'=1 850 mm 为完全展开状态,铰接Q、R距离;k=196 mm 为完全 展开状态,铰接Q、P水平距离的一半;m=162.5 mm 为完全折叠状态,铰接R、W竖直距离;n=33.5 mm 为完全折叠状态,铰接Q、R竖直距离;h'=759.52 mm 为完全展开状态,铰接Q、R竖直距离;o=1 849.7 mm 为完全折叠状态,铰接Q、R水平距离;ψ2为完全折叠状态,杆件QR与水平方向的夹角;ψ3为完全折叠状态,杆件RW与水平方向的夹角;ψ4为完全折叠状态,杆件QR与杆件RW的夹角。
2.3 机构的驱动位置选择
为实现机构从完全收拢到完全展开的运动过程,需要选取6 个合适的转动节点布置合适的驱动提供动力。将机构分别向x-y平面和y-z平面投影,得到的平面机构简图如图5 和图6 所示。为了便于安装电机,初步选择在支撑杆和天线平板及天线平板之间的节点处,即:A、B、C、H、M、K、O、R、W。为确保机构能够顺利展开,且辅助支撑杆在机构完全展开时共线,选择了A、A、B、K作为竖向展开的4 个驱动节点,选择了O、R作为横向展开的2 个驱动节点。双向平板折展单元机构完成展开过程,辅助支撑杆的展开角度变化如图9 所示,满足规定要求。
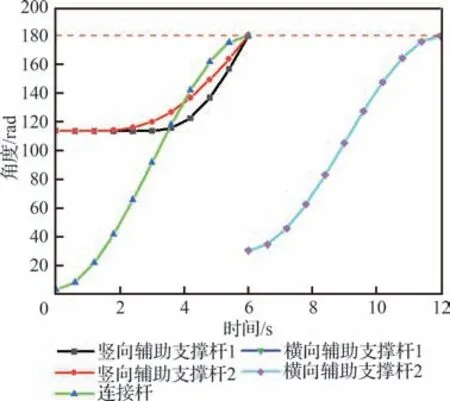
图9 辅助支撑杆和连接杆连接角度变化示意图Fig.9 Schematic diagram of connection angle change of auxiliary support rod and connecting rod
3 双向平板折展单元机构的运动学分析
双向平板折展单元机构的展开过程是竖向和横向2 个相互独立的展开运动,且均可以简化为1 个投影平面内的运动,投影得到的平面机构可以反映其对应的展开运动的运动特性,故将双向平板折展单元机构分别向x-y平面和y-z平面投影,分别以x-y平面和y-z平面的平面运动为研究分析对象。
3.1 竖向支撑机构运动学模型
3.1.1 单闭环运动学模型
竖向支撑机构可视为由5 个基本单元组成,记为loop1(环ABCD)、loop2(环ADEF)、loop3(环AFGHK)、loop4(环GHJI)和loop5(AFLM)。其中loop4 和loop5 是loop3 被辅助支撑杆件二次分割后得到的,如图10 所示。以A点为坐标原点建立坐标系,l(ii=1,2,…,21)为杆件参数,θ(ii=1,2,…,21)为角度变量,规定角度变量正值为顺时针,负值为逆时针。

图10 竖向支撑结构闭环示意图Fig.10 Closed loop diagram of vertical support structure
loop1 为全转动副的四连杆机构,其杆件参数和角度变量如图11 所示,驱动方式如图12所示。
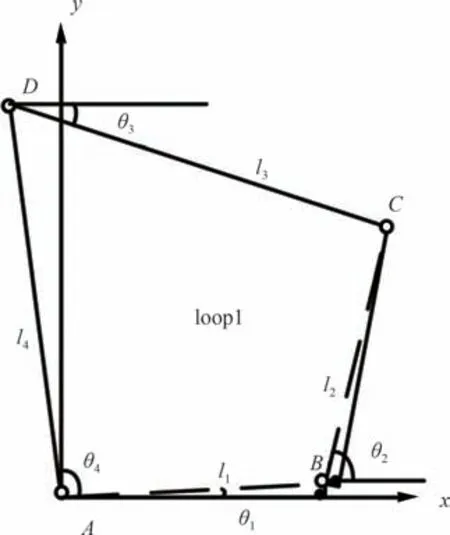
图11 loop1 变量Fig.11 loop1 variable
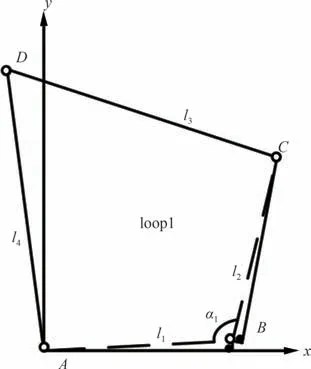
图12 loop1 驱动变量Fig.12 loop1 driver variable
根据已知的各杆件的参数,建立loop1 的矢量方程:

根据loop1 内的角度条件关系建立角度约束方程:

联立式(5)和式(6),建立loop1 的运动学方程:

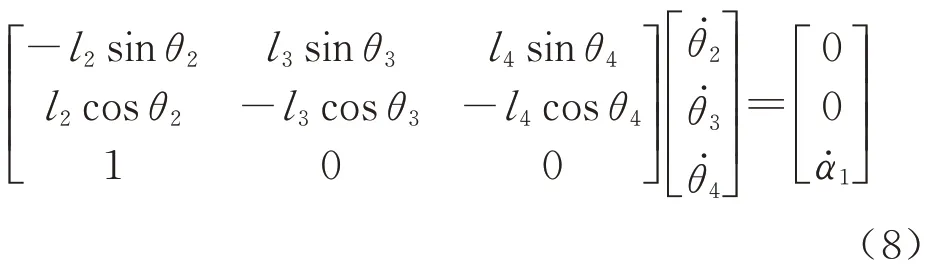
式(7)中θ1=2.68 °和α1为已知量,θ(ii=2,3,4)为角度变量,3 个角度变量对应3 个约束方程,则θ(ii=2,3,4)可解。对式(7)求导,可以得到角速度方程:

同理,loop2、loop3、loop4 和loop5 杆件参数和角度变量、驱动方式如图13 所示。
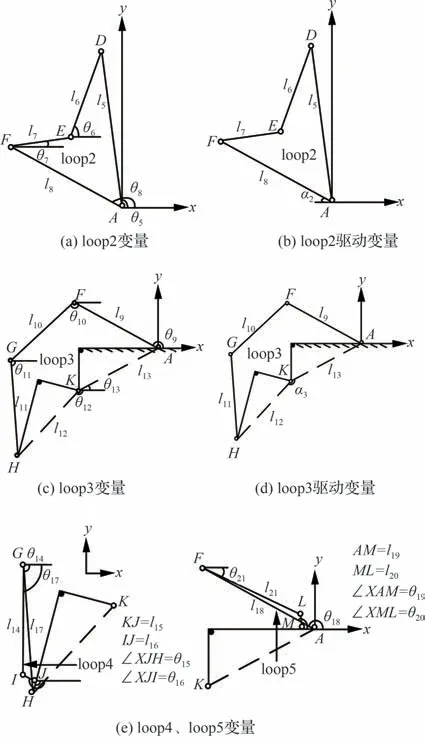
图13 loop2、loop3、loop4 和loop5 变量和驱动变量Fig.13 loop2,loop3,loop4 and loop5 variables and driving variables
参照loop1,根据已知的各杆件的参数和角度条件关系,建立loop2、loop3、loop4 和loop5 的运动学方程:


式(10)中ψ1为折展单元处于完全收拢状态下对应的角度,ψ1=179.65°。参照loop1,可得到各自闭环的角速度方程与角加速度方程。
3.1.2 竖向支撑机构运动学模型
竖向支撑机构的运动学分析不能独立每个单独的闭环,需要将所有闭环进行整合。介于loop4 和loop5 是由辅助支撑杆将loop3 二次分割形成的,辅助支撑杆的引入不影响机构的自由度,故其不是竖向支撑机构的主要部件,而是作为被动杆随机构展开。辅助支撑杆对竖向支撑机构的作用主要是在完全展开时对机构锁死,提供机构的支撑刚度。所以依然单独分析。基于运动方程的不变性,将loop1、loop2 和loop3 的运动学方程整合,则有

式(14)中θ1、θ13、α1、α2和α3为已知量,θ(ii=2,…,12)为角度变量,其中θ4=θ5,θ8=θ9,9 个角度变量对应9 个约束方程,则θ(ii=2,…,12)可解。对式(14)进行求导可得到角速度方程,为

通过式(15)即可求得各杆件角速度为

对式(16)进行求导可得到角加速度方程,方法参考loop1。
3.2 横向支撑机构运动学模型
横向支撑机构可视为由3 个基本单元组成,分别记为loop6(环OPQRW)、loop7(环QRTS)和loop8(环OPUV)。其中loop7 和loop8 是loop6 被辅助支撑杆件二次分割后得到的,如图14 所示。以点W为坐标原点建立坐标系,lj(j=22,23,…,32)为杆件参数,θj(j=22,23,…,32)为角度变量,规定角度变量正值为顺时针,负值为逆时针。
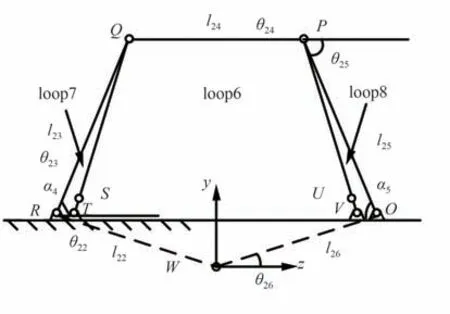
图14 横向支撑结构闭环示意图Fig.14 Closed loop diagram of transverse support structure
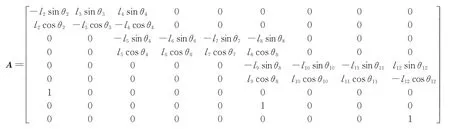
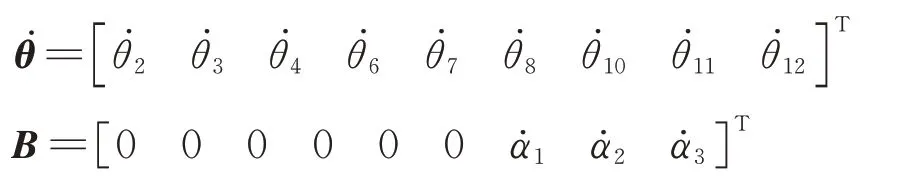
由于横向支撑机构是取自竖向支撑机构的四棱锥部分,即:loop6、loop7和loop8的结构与loop3、loop4 和loop5 相同,故建立运动学模型的方法相同,在此直接给出横向支撑机构的运动学模型:
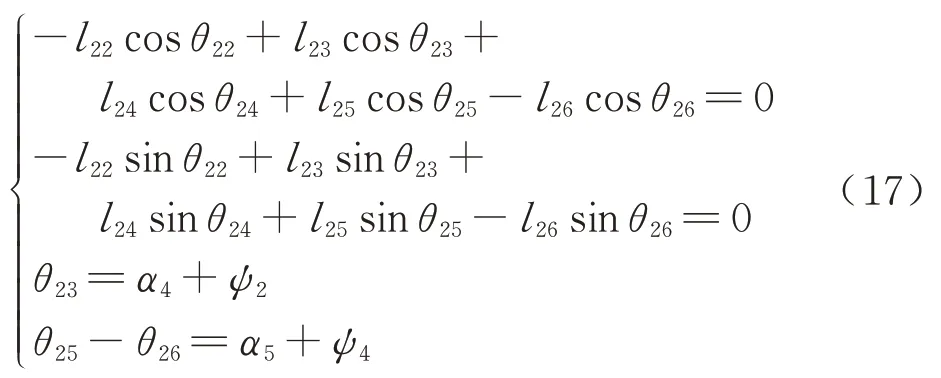
式(17)中ψ2为折展单元处于完全收拢状态下对应的角度,ψ2=1.04 °;式(17)中ψ4为折展单元处于完全收拢状态下对应的角度,ψ4=6.2°。
对式(17)进行求导可得到角速度方程:
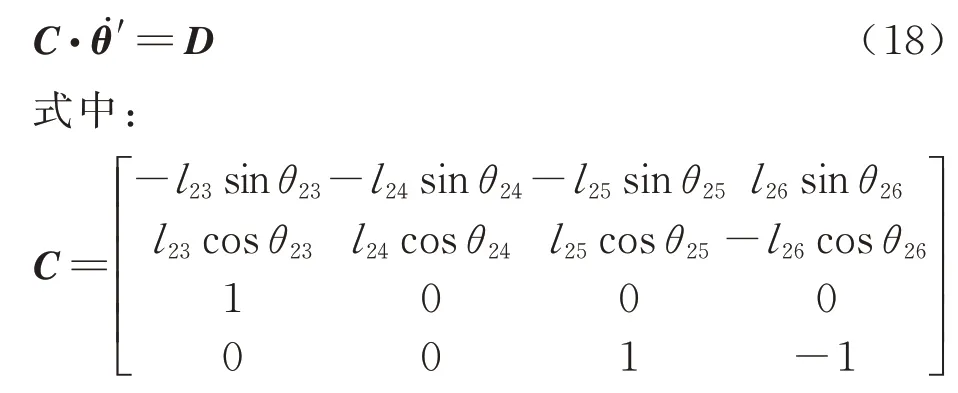
通过式(18)即可求得各杆件角速度为

对式(19)进行求导可得到角加速度方程,方法参考loop1。
3.3 机构奇异位置分析
机构运动学特性分析的重要应用之一便是预测机构的奇异位置。针对该机构,在分析单个展开闭环的基础上,利用机构的雅克比矩阵研究零值条件,从而得到机构发生奇异时的杆件角度关系。
对于单环机构而言,其奇异条件如表1 所示。

表1 不同闭环奇异位置发生情况Table 1 Occurrence of different closed-loop singular positions
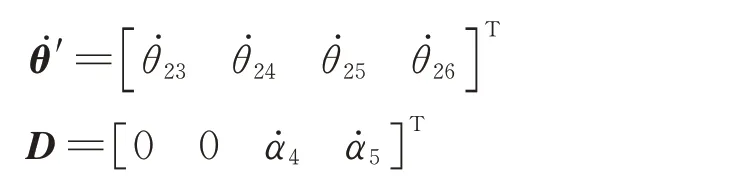
对于多环机构,多环机构的雅克比矩阵形式为式(20)和式(21)。
当雅克比矩阵行列式|J1|=0,|J2|=0 时,机构将处于奇异位置。竖向展开过程:当θ3=θ4,θ6=θ7,θ10=θ11时,|J1|=0,结合图18 可知,θ3与θ4,θ10与θ11曲线无交点,θ6与θ7存在交点只发生在竖向展开结束时,此时l6和l7共线导致loop2 产生终止奇异,但并不影响整个机构的竖向展开;横向展开过程:当θ24=θ25=θ26时,|J2|=0,结合图18 可知,θ24、θ25与θ26曲线无交点,故该机构在横向展开不存在奇异位置。
4 双向平板折展单元机构的仿真校验
为验证上述理论分析,采用SOLIDWORKS对双向平板折展单元机构进行了三维建模,用数值计算软件MATLAB 和仿真软件Adams 进行数值计算与仿真验证。机构各杆件的尺寸在完成机构设计时已经给定,具体参数如表2 所示。

表2 杆件尺寸参数Table 2 Member size parameters
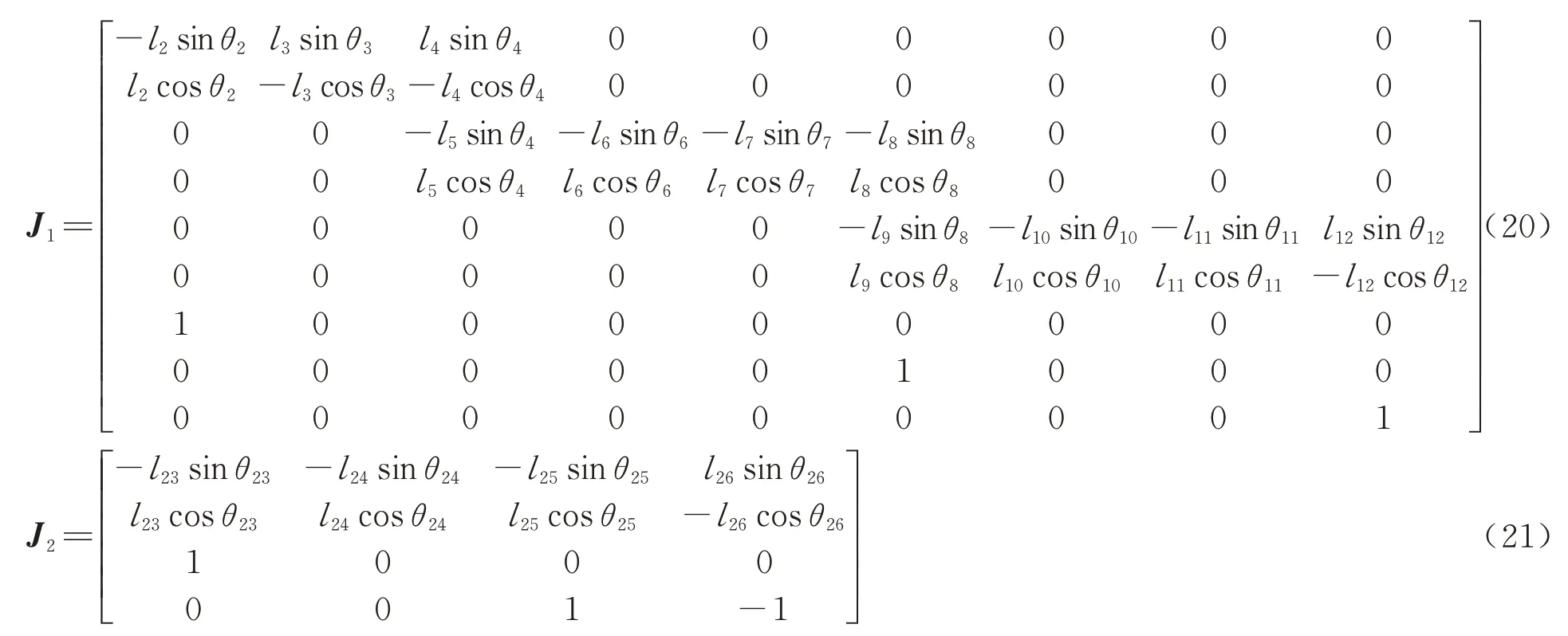
根据前面自由度分析得知,双向平板折展单元的展开需要添加6 个电机,即:2 个竖向支撑机构配备4个电机,横向支撑机构配备2个电机。如图5和图6所示,电机1、2、3分别布置在第1竖向支撑机构的B、K、A节点处,电机4、5分别布置在横向支撑机构的R、O节点处,电机6 布置在第2 竖向支撑机构的A节点处。各电机的驱动函数如表3所示。
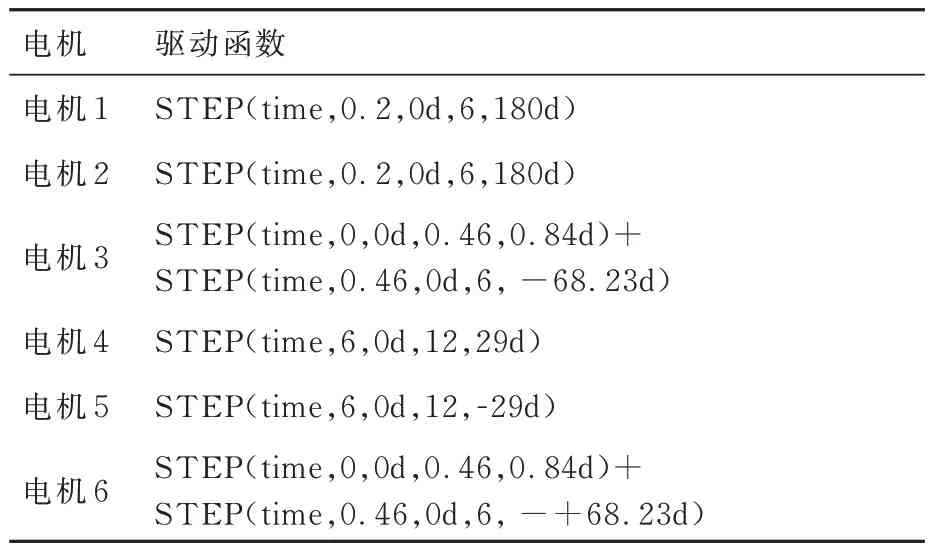
表3 电机及其驱动函数Table 3 Motor and its drive function
参照理论分析,给定驱动变量α1、α2、α3、α4、α5和α6,MATLAB 绘制出机构展开过程形位如图15 所示,Adams 仿真得到机构展开过程形位如图16 所示,MATLAB 和Adams 仿真得到各个关节点在x-y平面的竖向展开轨迹和各个关节点在y-z平面的横向展开轨迹如图17 所示,MATLAB求解和Adams 仿真数据得到其角度、角速度及角加速度曲线如图18 所示。
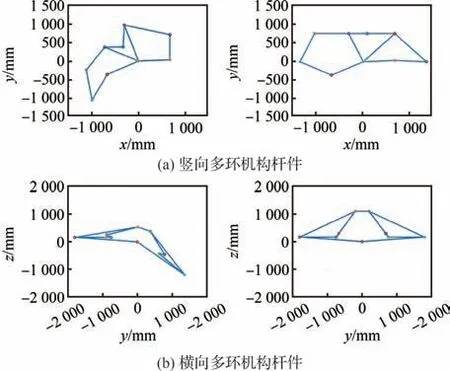
图15 MATLAB 绘制的展开过程形位图Fig.15 Shape bitmap of unfolding process drawn by MATLAB

图16 Adams 中展开过程形位图Fig.16 Shape bitmap of unfolding process in Adams
如图15 和图16 所示,理论绘制的形位图与软件仿真的形位图相同,且可以直观的观察到各杆件在展开过程中的运动情况,不存在干涉问题。如图17 所示,将轨迹视为机构展开过程中的外包络线,可以清晰的观察出机构展开过程中所需要的展开空间。
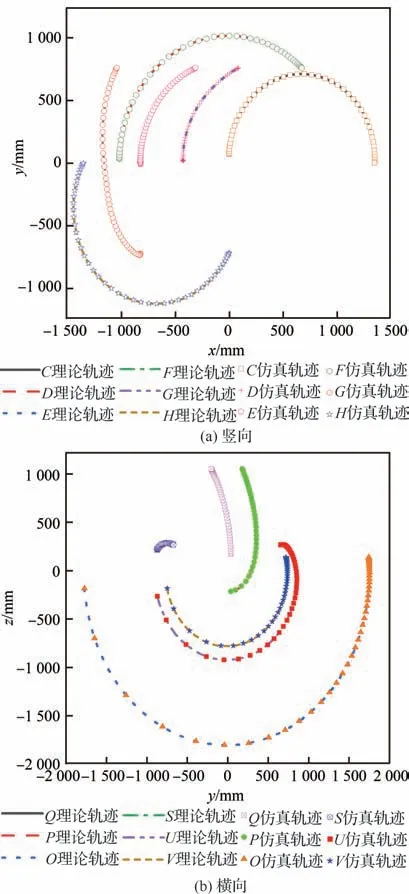
图17 关键节点展开轨迹Fig.17 Development trajectory of key nodes
结合图15~图18 对比可见,仿真得到的各点展开轨迹与理论计算结果匹配,这也与理论分析结论吻合;角度、角速度及角加速度的仿真曲线与理论曲线的高度一致性也说明了期望机构可实现连续收展运动,验证了理论分析的正确性。
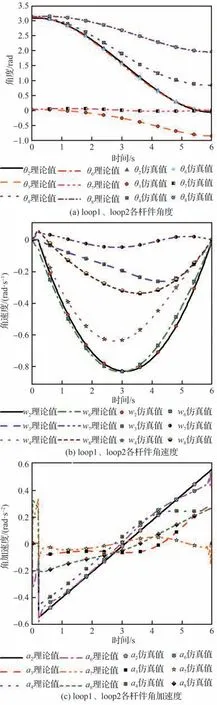

图18 各个杆件的角度、角速度及角加速度Fig.18 Angle,angular velocity and angular acceleration of each member
5 结论
为满足更大物理口径的平面可展开天线,提高平面可展开天线的刚度,基于四棱锥和三棱柱机构,提出了一种新型双向平板折展单元机构,取得的成果如下:
1)分别构造了平板天线竖向、横向支撑模块,得到了具有双向折展能力和高支撑刚度的平面可展开天线机构,且可以沿x-y平面规律拓展。
2)将该机构简化为平面机构,由平面自由度计算公式得到其自由度为6,确定了驱动布置位置。对简化机构进行运动学特性分析,采用闭环矢量法建立其运动学方程。对比分析了理论分析和仿真分析得到的机构运动轨迹和角度、角速度及角加速度特性曲线,验证了理论分析的正确性。
3)基于雅可比矩阵的行列式非零,分析了平面天线机构奇异位形,该机构只在竖向展开完成时存在终止奇异,但并不影响整个机构的完全展开。
4)本论文为新型大型平面天线的设计提供了一种可行的新构型,而且为其工程化设计提供了重要理论基础。
猜你喜欢
出版人(2022年11期)2022-11-15 04:30:18
四川建筑(2021年1期)2021-03-31 01:01:46
建筑机械化(2020年7期)2020-08-15 06:41:32
河北省科学院学报(2020年1期)2020-05-25 06:57:18
制造技术与机床(2018年11期)2018-11-23 01:07:50
科技创新与品牌(2016年8期)2016-09-29 22:25:52
通信电源技术(2016年5期)2016-03-22 01:09:37
工程建设与设计(2016年1期)2016-02-27 10:50:15
海军航空大学学报(2015年1期)2015-11-11 17:18:37
电源技术(2015年9期)2015-06-05 09:36:07
