履带式林下耕播机平顺性分析
2023-02-07 11:32徐铭原张莲洁张志文杨春梅
南方农机 2023年4期
徐铭原 ,张莲洁 ,张志文 ,杨春梅
(东北林业大学机电工程学院,黑龙江 哈尔滨 150040)
相比于传统的大田种植,林下种植已经成为新趋势。林下种植的一大难题就是耕整地装备的缺失,想发展林下种植,必须针对装备进行改进与设计[1-3]。为了推进林下种植技术,解决林下耕播难题,本文设计了一种专门用于林下耕播的耕播机[4]。林下耕播机的平顺性分析是衡量林下耕播机机动性的重要指标之一,所以对该林下耕播机进行平顺性分析是必要的。目前,平顺性仿真主要对于轮式林下耕播机研究较多,而履带式需建立数学模型,较为复杂,故分析的较少[5-6]。本文通过在RecurDyn软件中建立虚拟样机,使得路面激励直接作用于履带,更加符合实际情况。
1 林下耕播机模型的建立
RecurDyn(Recursive Dynamic)是由韩国FunctionBay 公司开发出的新一代多体系统动力学仿真软件。它采用相对坐标系运动方程理论和完全递归算法,非常适合求解大规模的多体系统动力学问题。其中有专门进行履带建模的工具包,履带接触均已经在内部设定完成,极大地简化了建模过程[7-8]。
通过SolidWorks 建立林下耕播机簧上质量部分模型,并将其保存成Parasolid 格式,将该模型导入到RecurDyn,通过RecurDyn履带建模部分建立模型,建立的模型如图1 所示;履带系统约束主要建立固定副、弹簧阻尼力、驱动力矩以及旋转副。
2 随机输入下的平顺性分析
2.1 评价方法
林下耕播机进行林间耕地、播种以及施肥过程中,需要保证整机移动的稳定性。如果平顺性较低,则会有侧翻风险,或在播种过程出现漏播或重播现象[9]。依据ISO 2631-1-1997《机械振动与冲击 人体处于全身振动的评价 第1部分:一般要求》标准中的规定,计算各单轴的加权加速度均方根值aw:

式中,T 为振动分析时间,一般取120 s。
垂直方向z轴频率加权函数wk(f)为:

频率加权函数wd(f):

同时考虑x 轴、y 轴、z 轴三个轴向的振动,三个轴向的加权加速度均方根值为:

按照上式计算的总加权加速度均方根值评价平顺性。通过加权加速度均方根值与人的主观感受对比可得平顺性评定区域。当加速度均方根值小于0.315 m/s2时,作业过程十分稳定。加速度均方根值为0.315 m/s2~0.63 m/s2时,作业过程可能发生不稳定,加速度均方根值大于0.63 m/s2时,作业过程易发生不稳定。

图1 林下耕播机行走机构三维图
2.2 路面模型的建立
林下耕播机行驶时候,主要的振动是由路面不平、传动系统和车轮等旋转部件激发的,路面不平是引起汽车振动的基本原因。所以主要讨论关于路面不平引起的汽车振动。路面相对于基准平面的高度与沿道路走向长度的变化称为路面纵断面或者路面不平度函数。大量实验表明,路面不平度是各态历经零均值的Gauss 随机过程[10]。
为了验证模型的准确性与合理性,根据GB/T 4970—2009《汽车平顺性试验方法》要求的试验条件和工况,在随机路面输入下对汽车的平顺性进行分析。在MATLAB 中生成该曲线,对各项参数的设定:空间频率最大值为4.2 Hz,空间频率最小值为0.65 Hz,路面总长度为200 m,采样间距为0.5 m,根据GB/T 7031—2005《机械振动 道路路面谱测量数据报告》将路面划分为A~H 共8 个等级,为模拟林间的路况,本文路面等级选定为H 级。确定好各项参数之后在MATLAB中生成路面不平度曲线,如图2所示。
2.3 随机输入下的仿真分析
基于所建立的林下耕播机虚拟样机及通过谐波叠加法建立的路面模型,按照行走平顺性的评价方法,进行各项仿真参数的确定,以2 km/h、6 km/h、14 km/h 的速度分别通过仿真路面。设置仿真时间20 s,仿真步数2 000 步,修改地面类型为土壤路面。分别以2 km/h、6 km/h、14 km/h 的速度通过仿真路面,林下耕播机垂向加速度变化曲线如图3、图4、图5所示。

图2 路面不平度曲线

图3 2 km/h速度垂向加速度变化曲线

图4 6 km/h速度垂向加速度变化曲线

图5 14 km/h速度垂向加速度变化曲线
通过分析比较3 张图可知,在H 级路面条件下,随着速度的提高,林下耕播机垂向加速逐渐增大,最大值分别从2.42 m/s2增加到8.83 m/s2,以2 km/h 速度前进时,在稳定后,在12 s~14 s 这个区间加速度增加到最大值2.42 m/s2,其余时间均在1 m/s2左右波动;以14 km/h 速度行进时,加速度多次超过5 m/s2,最大值达到8.83 m/s2。综上,随着速度的提高,垂向加速度也逐渐增大。
为了更直观地量化平顺性指标,根据不同速度下的林下耕播机前进方向、水平方向和垂向加速度通过公式计算得到的加权加速度均方根值可知,耕播机行进速度小于6 km/h时,可以正常工作;当速度达到14 km/h时,林下耕播机无法进行作业。
3 矩形障碍物的平顺性分析
林下耕播机在林间行走过程中,会有石头或者树木等障碍物位于道路中间,可分为以下两种情况:障碍物可能占满整个道路,此时双侧履带同时通过障碍物;障碍物也有可能占据一半道路,则可用单侧履带通过障碍物。为模拟上述工况,在路面上建立150 mm×150 mm 的矩形障碍物,依次让林下耕播机的单侧履带、双侧履带以2 km/h、4 km/h 的速度通过。通过改变道路位置和障碍物位置,使其分别位于林下耕播机单侧履带和双侧履带的前方使得林下耕播机通过矩形障碍物,仿真结果如图6、图7、图8、图9 所示。

图6 2 km/h双侧履带通过障碍物垂向加速度曲线
结果表明,不论双侧履带通过障碍物还是单侧履带通过障碍物,随着速度升高,垂向加速度均增大。在同一速度下双侧履带通过障碍物比单侧履带通过障碍物时的垂向加速度更大,且振动时长更久。以2 km/h 的行进速度通过障碍物时振动较小,但振动时长较久,以4 km/h 的速度通过障碍物时振动强度和振动时长均较大。所以,在前方通过障碍物时,可以以2 km/h和4 km/h速度通过。

图7 2 km/h单侧履带通过障碍物垂向加速度曲线

图8 4 km/h双侧履带通过障碍物垂向加速度曲线

图9 4 km/h单侧履带通过障碍物垂向加速度曲线
4 极限侧倾路面的分析
林间道路复杂多样,侧倾路面就是其中一种,侧倾路面较为危险,林下耕播机在路面行走时可能发生侧翻。所以建立不同侧倾角度的侧倾路面,从而求出可以通过的极限侧倾路面。通过RecurDyn 中Ground模块下的路面参数,路面侧倾角度从30°~45°中间隔3°取一点,一共取5 种侧倾角度路面。建立路面模型,主要分为3 段,即水平路面、过渡阶段以及侧倾路面。
通过仿真分析可知,林下耕播机在侧倾角度为41°的路面前进时发生侧翻。如图10 所示,表示右侧履带TrackLink2(履带板2)与地面接触力的变化情况,14 s 之后二者接触力持续为零,表明该林下耕播机已经发生侧翻。
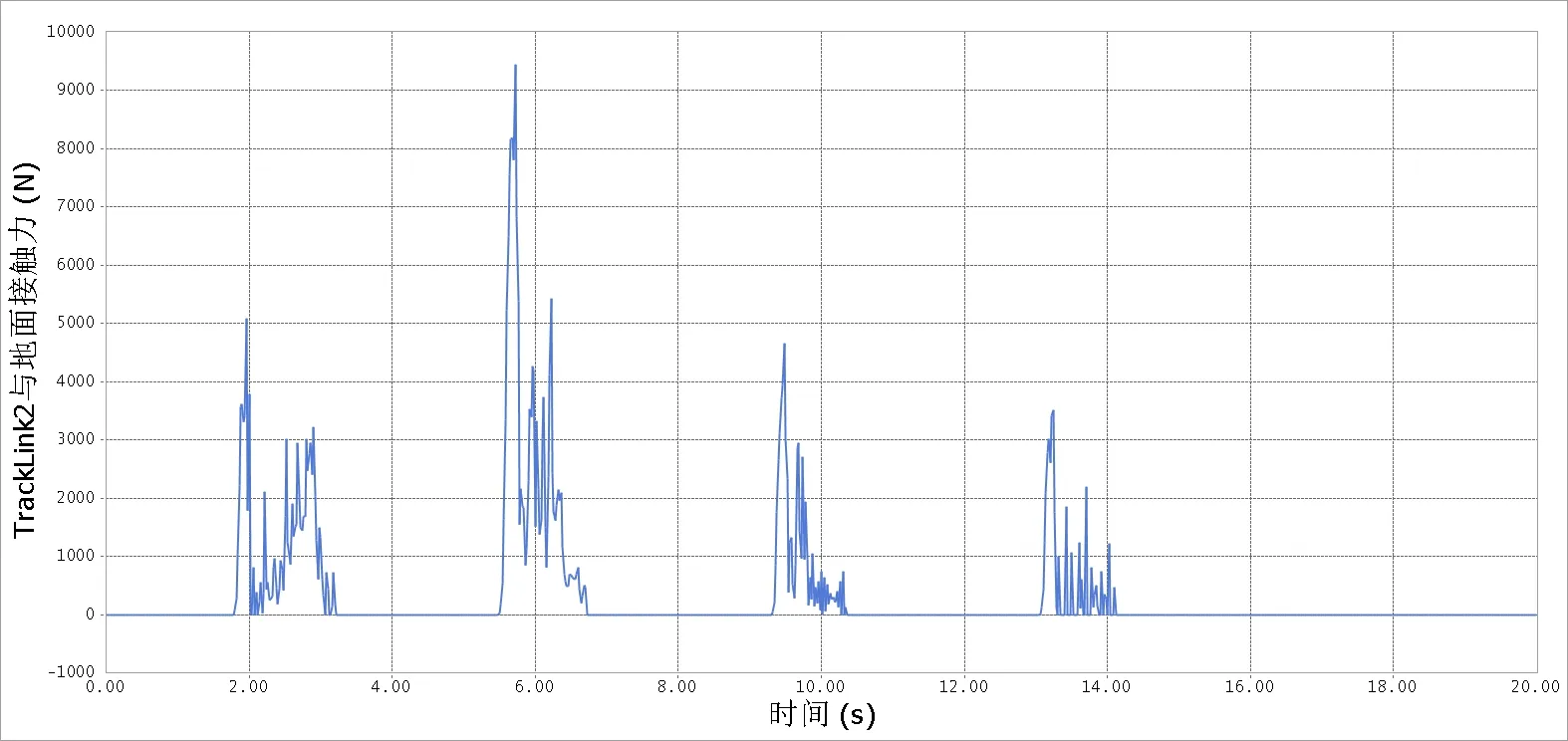
图10 TrackLink2与地面接触力
5 结论
本文通过在RecurDyn 中建立履带式林下耕播机的虚拟样机模型,建立不同的道路模型模拟在实际运行中经过的地形条件。结果表明,该林下耕播机在H 级道路上行驶时,速度在6 km/h 以下为合理速度。在通过矩形障碍物时尽量以一侧履带接地,另一侧通过障碍物时较为稳定。通过150 mm 高障碍物的时候,应该以2 km/h 或者4 km/h 的速度通过。林下耕播机通过不侧翻的极限侧倾角度为41°。本次对林下耕播机的仿真分析,证明履带式林下耕播机在林间道路行驶时符合要求,对于林下耕播机的使用和后续优化有着重要的指导意义。
猜你喜欢
机械设计与制造(2022年5期)2022-05-19
兵器装备工程学报(2021年3期)2021-04-09
装备制造技术(2020年2期)2020-12-14
石油化工建设(2019年6期)2020-01-16
汽车零部件(2019年10期)2019-11-13
今日农业(2019年12期)2019-08-15
现代农机(2018年1期)2018-02-11
空气动力学学报(2013年2期)2013-10-21
汽车与新动力(2012年5期)2012-03-25
振动与冲击(2011年10期)2011-09-17