一种监控作物生长的多功能可伸缩地膜系统*
2023-02-07 11:32赖扬东钟海鸿张京玲侯飞龙陈惠玲
南方农机 2023年4期
赖扬东 ,钟海鸿 ,张京玲 ,侯飞龙 ,陈惠玲
(五邑大学智能制造学部,广东 江门 529020)
0 引言
智慧农业是“十四五”规划期间农业信息化发展的主攻方向[1],以信息化引领驱动农业农村现代化,助力乡村全面振兴。为顺应智慧农业的发展趋势,针对传统地膜回收难的问题,本文设计了一种监控作物生长的可伸缩多功能地膜系统。该系统采用STM32主控芯片,结合AI 计算云端,具有菜地生长监控、自动换膜、智能灌溉等功能。本设计有如下创新点:
1)采用红外激光测量作物高度,能够帮助农户做出移植或者增肥的决策,可通过手机终端查看作物,降低错过补救机会的可能性,提高农户的工作效率。
2)地膜拥有伸缩组装功能,体型小,环境适配性高,相对大棚来说,节约了菜地整体搭建成本。
3)采用专门针对农田的环境检测控制系统,能够根据光照控制地膜透光率,根据土壤湿度控制滴灌速率。
1 系统方案设计
监控作物生长的可伸缩多功能地膜系统由中央控制平台、地膜更换控制系统、激光阵列、智能浇灌系统、环境监测节点、通信模块和手机App 等组成。地膜系统框图,如图1所示。
本系统的激光测距模块利用激光测距原理监测作物的生长情况,可以更全面地获取农作物的生长高度和宽度,结合基于ST-LSTM 的植物生长发育预测模型,能够帮助农户做出移植或者增肥的决策,并预测统计收成情况。
在智能控制方面,地膜更换控制模块可根据当前的光照值去适配相应的地膜。智能灌溉系统可通过ZigBee整合环境数据去适配水泵的滴灌速率。

图1 地膜系统框图
2 硬件系统设计
2.1 主控电路
监控作物生长的多功能可伸缩地膜系统的硬件主控制板由主控芯片STM32、光照强度检测模块、NBIoT 通信模块、ESP32CAM 图传模块、ZigBee模组、电机驱动模块组成。该硬件系统还可通过ZigBee 模组与激光测距系统、环境检测控制系统进行通信。硬件系统框图,如图2 所示。

图2 硬件系统框图
2.2 激光测距系统
激光测距系统利用了激光矩阵,可以通过多个红外测量模块VL53L0X 捕捉作物位置获得作物的三维高度数据集合,构建作物的三维图[2]。地膜系统激光采集模块图,如图3所示。

图3 地膜系统激光采集模块图
执行测距任务时,步进电机会带动横杆以2 cm/s的速度在菜地两端移动,不断用激光阵列对地面进行扫描,每隔1 s 获取一次距离S,并将其发送到主控芯片,再计算出农作物的高度L,保存起来,重复此过程。主控核心根据每次扫描的结果,先计算农作物的高度L,构建高度矩阵A,再通过遍历的方式获知最大值Lmax、最小值Lmin和农作物的宽度D。激光测距原理示意图,如图4所示。

图4 激光测距原理示意图
2.3 可伸缩组装框架
整个地膜框架下部分有一组专门控制高度的伸缩电机模块,当接收到升降请求的时候可以做出相应的操作。地膜系统的膜采用不同透光率的可重复使用薄膜拼接而成,当薄膜电机组接收到来自主控核心的指令时,会根据指令做出相对应的操作。系统更换薄膜的动力来自电机模组,电机模组在核心板的指令下控制电机带动转轴进行正反转更换薄膜。地膜可伸缩组装机械框架结构图,如图5所示。
2.4 环境检测控制系统
环境检测控制的硬件设计包括了主控芯片、通信模块、水泵、DHT11 空气温湿度检测模块、SGP30 气体传感器模块、DS18B20 温度传感器模块、B-LUXV30B 光照强度检测模块。环境检测控制系统硬件框图,如图6所示。

图5 地膜可伸缩组装机械框架结构图
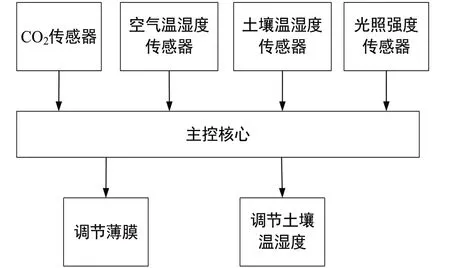
图6 环境检测控制系统硬件框图
当检测到的整合数据值低于设定值时,主控板会按照设定的程序发送指令给蓄水箱中的水泵,将储存在蓄水箱中的水调用到地膜内部的管道进行滴灌,以调节土壤温湿度。若光照强度需要调节,主控板则发送指令控制电机驱动板转动转轴,使合适透光率的薄膜能够转到相应位置,实现光照强度的调整[3]。
3 软件系统设计
3.1 云服务器和App设计
本系统的服务器功能是基于目前较为成熟的阿里云平台进行开发的,利用阿里云平台实现了后端服务器功能,并且对接阿里云IoT 平台,储存系统运行过程中产生的数据,地膜系统、手机App 通过MQTT通信协议与阿里云IoT 平台进行对接,在此平台上对地膜系统及其他相关设备进行统一集中的管理,用户可以在此平台上对设备进行开启、关闭和查看设备运行返回数据等操作。
3.2 基于激光测距的作物处理决策算法
本系统使用了激光测距获得的作物高度二维点,结合摄像头捕获植物色彩,用于生成作物的俯视时序图[4],使用基于ST-LSTM 的植物生长发育预测模型预测作物正常的生长状况[5-6],以均方误差、峰值信噪比和结构相似性为参照,与实际的作物生长状况进行对比分析。其中,均方误差、峰值信噪比评估了实际与预测图像之间的像素差异度,峰值信噪比越高,预测图像越接近实际图像[7-9];结构相似性用于衡量结构信息在图像上的差异。最后,根据分析结果将作物的生长状况反馈给用户。作物生长决策系统结构图,如图7所示。

图7 作物生长决策系统结构图
使用j个历史时刻的作物图像序列It-j+1:t来预测未来k个时刻的作物生长图像序列^It+1:t+k,预测公式如式(1)所示。

式中,It表示每个作物在t时刻的RGB 俯视图像,,m×n为RGB 图像尺寸;argmax 是函数f(x)取得最大值的x点集,^It+1为t+1 时刻预测的作物图像,p为贝叶斯概率。
植物生长发育预测模型由作物俯视时序图输入层、卷积层、ST-LSTM 网络隐含层和输出层组成。首先,将历史j个时刻的作物图像序列输入到卷积层进行卷积运算;其次,输出到ST-LSTM 网络隐含层,对作物的时空特征进行提取;再次,输出到卷积层,连接到ST-LSTM 网络隐含层的所有状态;最后,通过历史状态和相邻输入预测k个时刻的生长发育图像并输出[10]。多层ST-LSTM 单元堆叠形成ST-LSTM 网络隐含层,ST-LSTM 单元结构如图8 所示。
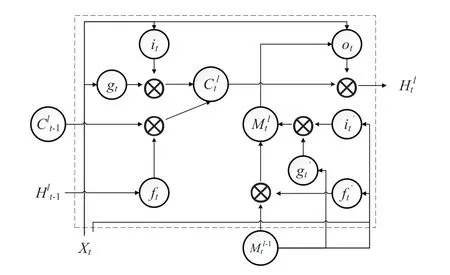
图8 ST-LSTM单元结构图
通过获取作物生长环境的环境数据,结合激光测距获得的高度数据,自主学习生成模型,用于判断所种植的农作物是否符合正常的生长规律,再通过手机App 将作物的生长状况及时反馈给用户。
4 结束语
本文设计了一种监控作物生长的多功能可伸缩地膜系统,采用STM32 作为主控芯片,可根据农户的需求,伸缩组装地膜系统,帮助农户实现远程观测、自动换膜、监测作物生长、智能灌溉的农田智能化管理。该系统的主要功能是根据激光测距阵列获取植物生长的高度、宽度,进行云端数据分析,来帮助农户做出移植或者增肥的决策,并预测统计收成情况。当作物成长完成后,可以通过电机回收地膜,解决农田地膜残留问题。该设计扩展性强,适用于大多数农田作物种植环境,具有良好的应用前景。
猜你喜欢
今日农业(2020年20期)2020-12-15
今日农业(2020年17期)2020-12-15
汽车维修技师(2019年7期)2020-01-16
世界农药(2019年4期)2019-12-30
今日农业(2019年10期)2019-01-04
通信电源技术(2018年5期)2018-08-23
汽车维修技师(2018年11期)2018-05-11
制导与引信(2017年3期)2017-11-02
中学生数理化·高一版(2017年1期)2017-04-25
中国高新技术企业(2015年25期)2015-07-24