
空中交通工程学理论内涵与关键科学技术
2023-01-10 03:50赵嶷飞王梦琦
航空学报 2022年12期
赵嶷飞,王梦琦
中国民航大学 空中交通管理学院,天津 300300
2006年,《国家中长期科学和技术发展规划纲要(2006—2020年)》[1]中,将“新一代国家空中交通管理系统”列为优先主题。经历15年探索和实践,以保障飞行安全、提升效率为目标的空中交通管理系统已经实现跨越式发展,空域管理、交通流管理、间隔管理技术全面升级的同时,技术体系也逐步形成。本文以构建空中交通管理学科为目标,归纳整理现有研究工作,同时借鉴地面交通工程学理论和方法,从空中交通工程学定义、科学问题、关键技术梳理出发,构建学科知识体系,为后续研究奠定基础。
1 空中交通管理概念
国际民航组织(International Civil Aviation Organization,ICAO)空中交通服务附件(附件11,第15版,2018年)[2]中,将空中交通定义为:空中飞行或者机场机动区内运行的全部航空器。其中机场机动区(Maneuvering Area)是指机场内供航空器起飞、着陆和滑行的部分,但不包括停机坪。机动区和停机坪合称为活动区(Movement Area)或空侧(Air Side)。
ICAO《空中交通管理》(Doc 4444,第16版,2016年)[3]中,对空中交通管理的定义是:以安全、经济和高效为目标,依靠各类地面和机载的设施设备的不间断服务与协同配合,通过空中交通服务(Air Traffic Service,ATS)、空域管理(Airspace Management,ASM)和空中交通流量管理(Air Traffic Flow Management,ATFM)等方式,对空中交通和空域进行动态和一体化管理。
根据以上定义,空中交通管理概念如图1所示。在空中或者机场机动区内,飞行员按照既定的飞行计划,在空中交通管制员(Air Traffic Controller,以下简称管制员)指挥下飞行,生成包括位置、高度、速度、航向、偏航角度、俯仰角度、滚转角度等航行诸元的飞行航迹。在航空器诞生初期,飞行员主要靠目视观察航行诸元。20世纪20年代,高度表、速度表、磁罗盘、姿态指示器、无线电定向仪等机载航行仪表及地面无线电导航台建成后,飞行员转而依靠仪表掌握飞行状态,按照导航设施规划的飞行程序和空中交通规则,在管制员指挥下,控制航空器位置、高度、速度和航向。进入21世纪后,随着全球定位系统(Global Positioning System,GPS)等星基导航系统逐渐完善,卫星导航开始逐步取代地基设备,成为主用航空导航源。
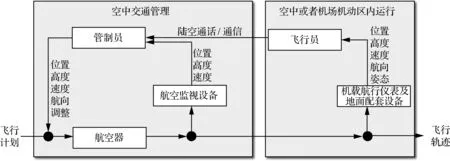
图1 空中交通管理概念
空中交通管理过程中,管制员通过飞行员报告、雷达、广播式自动相关监视(Automatic Dependent Surveillance-Broadcast,ADS-B)等手段和监视设备,掌握航空器位置、高度、速度等信息,然后直接对飞行员发出控制指令。按照ICAO空中交通规则,执飞仪表飞行程序(Instrument Flight Rules,IFR)的飞行员必须按照指令控制控制航空器位置、高度、速度和航向。在这一过程中,管制员事实上取代了飞行员,成为航空器行为的实际控制者。在繁忙的管制空域扇区(根据交通流特征和管制员工作量,将空域细分为多个扇区,每个扇区由一名管制员指挥)中,管制员常常需要同时指挥10架以上的航空器。
空中飞行、地面指挥的空中交通管理方式,并非一蹴而就,而是经历近百年发展演化,最终形成。
2 空中交通管理发展历程
与火车、轮船等交通工具发展历程类似,航空器诞生之初主要用于飞行表演。1911年前后,欧美第一批定期运输业务开通,航空器开始成为使货物、旅客地理位置上转移的运输工具,天空中真正出现了来往通达的空中交通。此后100多年,在交通量增长和航空安全压力推动下,今天的空中交通管理系统逐渐形成。本文主要参考美国发展历史,概述这一发展过程。
2.1 空中规则(20世纪20年代之前)
1903年12月17日,美国发明家莱特兄弟,研发成功“飞行者一号”航空器,完成人类历史上首次可控制的、比空气重飞行,航空时代从此来临。航空器发明初期,公众对飞行的狂热,催生出欧美各大城市兴建机场、组织飞行表演的热潮。早期飞行表演中,观众、航空器活动不受约束,摔飞机、伤观众事件时有发生。1908年9月17日,莱特兄弟中的Orville Wright在飞行表演时,螺旋桨断裂,航空器失控坠入观众中,1名观众死亡。1912年5月30日,美国西雅图某机场飞行表演时,1名观众突然冲到正在起飞的航空器前方拍照,飞行员紧急避让冲向看台,造成观众2死12伤。
1913年,面对严重的安全形势,柏林约翰内斯塔尔(Johannisthal)机场出台飞行表演10项规定,明确要求航空器之间、航空器与地面观众之间,保持足够安全距离;要求航迹交叉的两架航空器,右侧航空器拥有“航行优先权(Right of Way)”,左侧航空器必须主动避让。这10项规定很快在欧洲各国机场流行起来。1919年,世界上第1个国际航空公约——《巴黎公约》中,为“减少重于空气航空器相撞风险”,制定了约束航空器行为的“空中规则(Rules of Air)”,将航行优先权、避让规则正式上升为国际标准。规则在欧洲各机场执行过程中发现,航空器起飞、降落过程中,飞行员视线受机体遮挡,无法看见后方(下方)活动航空器,无法及时做出避让动作。这一飞行员无法克服的困难,最终导致规则执行者——管制员的诞生。
2.2 空中交通管理单位和管制员(20世纪20—30年代末)
为了落实空中规则,1922年,世界上第1个机场交通管制员(此后统称为塔台管制员)、第1个空中交通管制塔台(简称塔台)在英国伦敦Croydon机场出现[4],其主要任务是利用指挥旗、信号灯,向起飞航空器发布起飞许可,确保起降航空器之间安全间隔。出于同一原因,1929年,美国第1名塔台管制员Archie William League开始在圣路易斯机场指挥航空器起降。
从1911年开始,鉴于航空器载重小,但速度快的特点,美国、英国、德国邮政部门开始尝试使用航空器运输邮件。9月9日,世界第1条定期邮政航空运输航线在英国开通。1918年,幅员辽阔、航空运输需求更为迫切的美国,开始建立连接东西海岸的空中邮路。1924年1月,随着航路信标台、应急备降场、低空通信等地面设施和机载航行设备的完善,全长4 200 km,连接东西海岸,年运送1 400万封信和包裹的,跨州航路系统全线开通[5]。1925年,航空邮政法案(Air Mail Act of 1925,也称Kelly Act)批准私人公司取代政府经营航空邮政业务,一大批航空公司就此诞生,商业航空运输也由此起步。20世纪30年代初,随着波音247、DC-2等全金属客机问世,航空旅行安全性、舒适性大大提高,旅客运输量开始快速增长,航空运输第1个黄金时代到来了。30年代中期,配备了专职管制员的纽约Newark机场和芝加哥机场起降高峰达到50~60架次/h,成为美国最繁忙的航空枢纽。
在机场交通管理接受管制员指挥的同时,几千公里空中航路只能依靠飞行员自主保持交通秩序。1935年5月6日、10月7日,环球航DC-2、美联航Boeing 247D先后在航路飞行中坠毁,航路飞行安全引起全社会关注。在多家航空公司共同推动下,1935年12月1日,全球第1个航路管制中心在纽瓦克机场成立。中心管制员负责控制航路上航空器次序和间隔,避免多机同时到达机场上空引发事故。参照这一模式,1936—1937年,芝加哥、克利夫兰等7个航路管制中心相继建成。
2.3 从程序管制到雷达管制(20世纪30年代末—50年代后期)
1938年,美国联邦政府出台民用航空条例(Civil Air Regulation)第60部,将飞行分为由地面管制员负责防撞的IFR和由飞行员负责防撞的目视飞行规则(Visual Flight Rules,VFR)2大类。这一基础性法规,明确了IFR飞行员必须服从管制员指挥的基本原则。此后,随着商业运输航班、大型机场终端区内,强制实施IFR法规的出台,管制员管辖范围不断增大,最终成为空中交通管理的核心。1948年,ICAO 《空中规则和空中交通管制(Rules of the Air and Air Traffic Control)》(Doc 5500)[6]中,采用VFR和IFR划分同时,更进一步明确空中交通管制(Air Traffic Control)主要目标是:防止航空器相撞,防止航空器撞地,加速和维持空中交通有序流动。随着ICAO标准被各成员国广泛接受,这一定义成为全球空中交通管理最核心、最基本的准则。
航路管制诞生之初,管制员只能通过飞行员无线电报告掌握航空器位置,不仅位置不准确,通信延迟也大。为了保证安全间隔,管制员不得不使用1套复杂的控制程序:沿航路建设多个无线电台站,航空器飞过时必须报告飞越时间和高度;2个航空器汇聚飞行时,必须满足大于指定的汇聚角度;航空器飞行高度必须按照规定的高度层执行等。这类方法统称为程序管制(Procedure Control)或则非雷达管制(Non-Radar Control)。程序管制下,同一航路上航空器之间必须保持100 km以上飞行间隔。到20世纪40年末,随着航空器数量激增,各大机场和骨干航路上,已经没有足够空间满足这一要求[7]。诞生于第二次世界大战中的雷达,能够以秒级的更新周期显示航空器空中位置,管制员用眼睛观察雷达屏幕就能迅速发现飞行冲突,准确性、效率远远高于程序管制。雷达因此迅速用于空中交通监视与管理。从1946年起,美国各大机场开始安装雷达,用于监视进离场航空器和引导航空器5边飞行。1956年,航路管制中心开始配备监视距离超过250海里的航路监视雷达。在雷达支持下,管制员彻底摆脱了操作繁复的程序管制方法,转而借助雷达监视航班位置,通过无线电控制飞行活动,雷达管制(Radar Control)时代从此到来[7]。时至今日,虽然经过多次技术升级,但这一管制模式仍然没有根本性的变化。
2.4 航班延误与交通流管理(20世纪50—70年代末)
雷达管制将原有100 km以上飞行间隔,缩减到10 km以下,空域利用率和飞行量因此大幅度提升。1958年,波音707首飞,标志着速度更快的喷气时代到来。大量高速航空器的涌入,管制员逐渐成为空中交通流量增长的瓶颈。1960年代中期,面对激增的交通量,美国管制员开始抱怨工作量大、工作环境不佳。与此同时,航班延误也在不断加剧。1968年7月19日,纽约地区爆发大面积延误航班,3 h内1927架航班起降受到影响,延误很快波及全国。美国联邦航空局(Federal Aviation Administration,FAA)由此认识到,现有航路和机场管制已经不能满足要求,必须加强全国性交通流管理。1970年4月,FAA总部成立中央流量管理机构(Central Flow Control Facility),7月29日并入应急管理等职能后,改名为空中交通管制系统指挥中心(Air Traffic Control Systems Command Center,ATCSCC)。该中心从缓解枢纽机场延误角度,协调全国各机场、各航路管制中心航班起飞、降落时间,是全球首个全局性交通流管理机构。与美国发展过程类似,欧洲各国从1972年开始建立国家级交通流管理系统,并于1996年合并为全欧洲统一的中央流量管理系统[8]。
20世纪70年代末,美国政府出台的“航空公司放松管制法案”极大的加剧了航空运输市场竞争。大量新出现的航空公司带来航空运输量爆发性增长和管制员工作负荷激增。1981年8月3日,全美82%管制员,约12 300名管制员宣布罢工,由此引发时至今日仍未完全解决的劳资纠纷问题和各方对空中交通管理发展方向的思考。从技术角度看,20世纪30-40年代确立的、以管制员为核心的空管系统,在经历了雷达管制、交通流管理之后,管制员有限能力与交通量持续增长的矛盾不仅依然存在,而且更加突出,逐渐将成为制约增长的主要因素。
2.5 下一代航空运输系统(20世纪80年代末开始)
在当时流行的自动化理论指导下,1982年9月,FAA出台历史上最大的管制系统升级计划,拟将飞行计划自动校验、飞行冲突自动探测与解脱等技术融入空中交通管理,建设先进管制自动化系统(Advanced Automation System,AAS)[9]。该计划进展很不顺利,多次推迟之后,1994年宣布重组。几乎同一时间,国际知名航空标准化机构RTCA(Radio Technical Commission for Aeronautics)提出了“自由飞行(Free Flight)”概念,其核心是IFR飞行可以由飞行员实时、自主选择飞行路线、速度和高度[10-11]。“自由飞行”打破了自1938年以来形成的,由管制员指挥IFR飞行的基本原则,允许飞行员分担管制职责,是管制体制的重大变革。遗憾的是, “自由飞行”实施中进展缓慢,开发的辅助决策自动化工具,在小规模验证后,就停止使用。
与之形成鲜明对比的是,1999年7月10日,FAA与货运航空公司组织(Cargo Airline Association)联合测试的,能够让飞行员之间、飞行员-管制员“互相看见的”ADS-B(Automatic Dependent Surveillance-Broadcast)技术却显示了巨大生命力,发展到今天,已经成为全球标准,大有取代雷达之势。与ADS-B类似,源于空管二次雷达应答技术的机载空中交通告警与防撞系统(Traffic alert and Collision Avoidance System,TCAS),赋予航空器全新的自主冲突探测与避撞能力,今天已经成为全球航班必备设施。AAS失败、“自由飞行”受阻,ADS-B和TCAS蓬勃发展,已经揭示出空中交通管理从单纯依靠地面指挥,向空地协同管理的发展方向。
2004年初,FAA等7部门联合启动新一代航空运输系统(Next Generation Air Transportation System, NextGen)计划,意在研发2025年后使用的新一代空中交通系统。NextGen提出未来是基于航迹的运行(Trajectory Based Operation,TBO)。飞行员将与管制员密切协同,共同确定门到门四维飞行航迹。管制员将从关注扇区内少数航空器速度、高度、航行等航行参数,发展为与多部门共同协商,动态调整多条航迹[12]。与美国几乎同步,欧盟启动单一欧洲天空空中交通管理研究计划(Single European Sky Air Traffic Management Research,SESAR),同样将TBO作为重要的发展方向[13]。
2014年3月19日,欧洲成功完成初始4维(initial 4D,i4D)飞行实验[14]。整个飞行过程中,地面系统通过地空数据链,向航空器发送沿途各点的控制到达时间,机载飞行管理系统根据这一时间自动控制飞行速度。结果表明,航空器控制误差在10 s以内,精度远高于先行控制方式。2019年3月20日,中国自主开展的天津—广州间i4D飞行试验同样获得成功。2019年9月27日,北京大兴机场开航。中国首套高级地面活动与控制系统投入使用。航空器落地后,系统自动生成无冲突的滑行路线,同时通过控制航空器前方灯光颜色引导航空器滑行,管制员仅在设备故障或航空器违反灯光指令时才介入指挥。这些突破揭示出新一代空中交通管理系统方向:航空器在没有管制员、飞行员直接介入的条件下,完全依靠地面—机载系统协同实现高精度、安全飞行。
3 空中交通工程学发展历程
空中交通工程学是为空中交通管理实践提供理论指导的1门学科,其发展阶段、研究内容,必然与当时的现实需求密不可分。与此同时,作为1门新兴的学科,人们对其自身规律的认识也经历了1个从感性到理性的发展过程。在以上2个因素共同作用下,以美国发展为主要线索,空中交通工程学科发展经历了以下几个阶段。
3.1 观察运行(20世纪40年代中期之前)
20世纪30年代末,随着波音307等增压座舱航空器投入使用,空中旅行舒适度大大提高。美国民航业借此完成从运输邮件到运输旅客的转变,旅客周转量迅速增长。与高速发展极不相称是,机场建设、管理非常混乱。机场跑道布局有“米”字、“A”字、“井”字型,甚至圆形。机场区域内飞行表演和定期航班,航空器与行人、车辆混行。为了保证安全、提升效率,美国航空主管部门组建的机场交通管制咨询委员会(Committee On Airport Traffic Control)提出2项措施:定义进场盘旋时间、进场滑行时间、过站时间、离场滑行时间、离场时间等5个观测指标,定期统计比较各机场运行状况,对比发现短板和整改方向;将运行中好经验总结形成建议标准推广使用。在这两项措施推动下,美国各机场设施设备标准和运行管理程序逐步接近,为统一国家标准奠定了基础。
1945年,美国第1代航路管制员,有美国空管之父美誉的Gilbert专著《空中交通管制(Air Traffic Control)》[15]正式出版,标志着在充分总结实践经验基础上,美国空中交通管理设施设备体系、运行规章体系正式形成。1947年,世界上第1篇空中交通管理问题研究文献问世。无线电物理大师Bowen[16]基于澳大利亚悉尼金斯福德·史密斯机场(Kingsford-Smith Airport)运行数据,分析了航班实际落地时间分布特征和影响因素。表1对比了Gilbert和Bowen采用的研究方法,可以发现行业专家和理论学者研究方法上的差异。
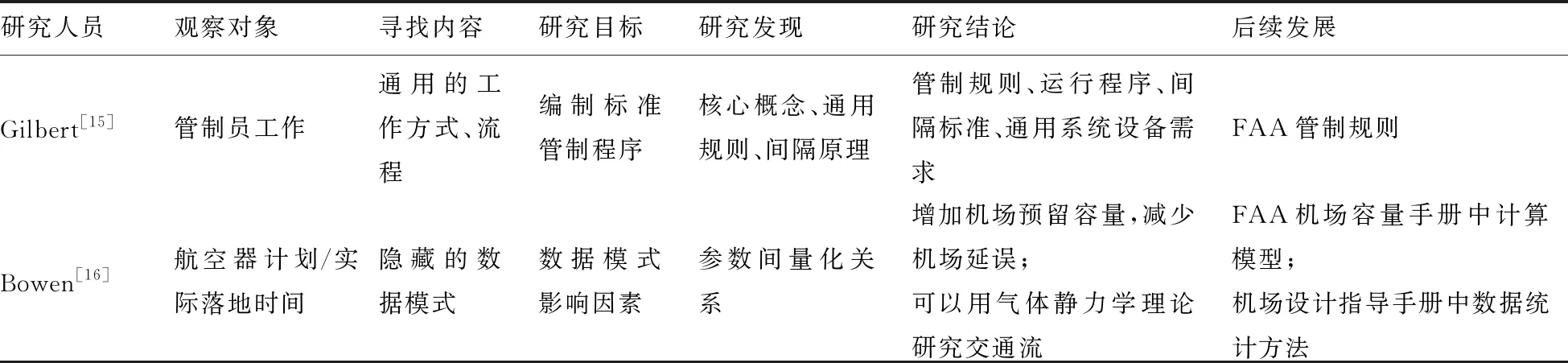
表1 空中交通管理问题研究方法对比
3.2 容量与安全研究(20世纪40年代中期—90年代中期)
从1946年开始,美国逐步进入雷达管制时代。从理论上看,雷达管制下,航路飞行间隔比程序管制缩小80%以上,飞行量可以相应增长,但这一预期却没有实现。机场容量首先成为增长瓶颈。1945年,Gilbert[15]在其空管专著中,用给定时间内航空器最大起降数量表示机场容量(Capacity)。1949年11月,美国联邦民航管理机构(Civil Aviation Association,CAA,FAA前身)提出,机场规划时必须考虑容量问题。在标定机场容量同时,1953年CAA在《空中交通管制系统运行(Operation of The Air Traffic Control System)》[17]文件中,首次提出交通流控制(Flow Control)规则:当管制区内IFR航空数量将超过所能安全管理的容量,计划进入区域航空器需要延误时,可以启动流量控制程序,增加航空器进入扇区和到达机场的间距。在政府支持下,容量、延误、流量控制等运行实践中率先暴露的问题,很快成为空中交通管理研究关注点。
3.2.1 跑道容量
跑道作为空地交通交汇点,无疑是机场容量的决定要素。从理论上讲,连续起降或者起降间隔航空器之间必须保证一定间距,间距越大则跑道容量越小,反之则越大。但在实际运行环境中,前后机飞行速度和到达跑道入口时间、跑道入口布局、机场跑道构型、航空器进近程序,甚至跑道附近的空中交通等因素,都会对前后机间距、跑道容量产生影响。延续Bowen研究,从20世纪60年代初到70年代中期, Blumstein[18]和Zanieski[19],从航空器到达跑道入口时间、占用跑道时间入手,先后构建了基于确定性因素的解析模型,和基于关键时间分布特征的随机模型,编制了跑道容量计算公式和查询图表,在机场规划设计中使用。针对更为复杂的影响因素,1964年,美国加州大学伯克利分校(University of California,Berkeley)和美国麻省理工学院(Massachusetts Institute of Technology,MIT)率先开展机场跑道-终端区仿真研究。基于排队论原理,将航空器进场过程用一组串联的服务台模拟,重点观察落地间隔、跑道利用率、流量、延误等参数的变化,作为判断系统容量的依据。1989年,FAA将多年仿真研究成果整合为全系统机场-空域快速仿真模型(Airport and Airspace Simulation Model,SIMMOD),成为后续全球多款空管系统快速仿真模型的鼻祖。1966年,FAA在大西洋城搭建了一套专门用于研究的雷达管制模拟机,与真实管制设备完全一致,由管制员直接上机指挥模拟航空器运行。该设备可以从管制员角度感受流量水平和容量评估效果,是SIMMOD等快速仿真模型的细化和补充。
3.2.2 空域扇区容量
雷达管制下,航空器间隔小,交通密度大,管制员观察态势、做出决策、发布指令需要消耗大量的精力和体力。因此,空域扇区容量主要取决于航空器数量、分布、速度,以及空域扇区形状、运行规则等交通要素带来的管制工作负荷和管制员承受能力。从20世纪60年代初开始,随着雷达管制全面铺开,FAA启动管制工作负荷、扇区容量和扇区设计研究,目的是形成标准化的扇区容量评估方法和扇区设计手册[20]。1984年公布的ICAO Doc 9426[21]中,推荐了英国运筹与分析理事会提出的“DORATASK”方法和德国Messerschmitt的“MBB”方法。与美国从交通分析入手不同,欧洲采用从管制员入手,直接观察和记录管制员指挥航空器通话、填写进程单、与其他管制单位协调通话、填写工作日志等“看得见的”工作时间,采用调查方法获得管制员观察雷达屏幕、思考管制措施等“看不见的”工作时间,通过加权累加获得完整的工作负荷。如果某个单位时间段内,管制员总工作时间(即工作负荷)占单位时间段总时间的70%~80%,此时扇区内航空器架数,就是空域扇区容量[22]。借助这一发现建立的量化关系,可以根据航班数量直接计算工作负荷[23]。与机场容量研究类似,SIMMOD、雷达管制模拟机等仿真工具也用于空域扇区容量研究[24]。
3.2.3 流量控制
机场、空域扇区容量量化后,根据容量约束优化流量控制也成为可能。1989年,MIT Odoni等[25]提出非常著名的地面等待模型(Ground Holding Program,GHP),也被称为地面延误模型(Ground Delay Program,GDP)。该模型将繁忙机场容量转化为单位时间内可用到场时隙,将流量控制问题转化为延误最小目标下的时隙优化分配问题。该模型奠定了空中交通流量管理研究基础,后续又用于终端区、多机场、航路网交通流管理问题研究。需要注意的是,与地面交通流基于流率的管理方法不同,空中交通流量管理从原理上完全承袭了1953年空管规章中流量控制方法,即直接控制每架航空器的起飞、降落和空中飞行时间,这一机制延续至今[26]。
3.2.4 安全间隔
20世纪早期空中规则中提出,为防止相撞,航空器之间必须保持安全间隔。实施过程中,安全间隔标准主要根据运行经验确定。程序管制中,源于美国跨州航路系统运行经验,制定了同航迹、同高度、同速度航空器10 min纵向间隔标准。使用1次监视雷达后,管制员根据航空器回波符号大小确定安全间隔[27]。基于经验、人工判断判定的间隔标准,不可避免带来过大冗余,造成空域资源浪费。
1966年,以安全缩小运行中的间隔标准为目标,英国皇家飞机学会(Royal Aircraft Establishment)启动间隔标准、碰撞风险和导航性能研究,Reich[28]提出了经典的航空器碰撞风险模型和间隔标准评估方法,统称为Reich模型。该模型基于以下场景:航空器沿着管制员制定航线飞行,受导航定位、飞机操作、高度表等误差影响,航空器位置、速度、高度都会以一定概率发生偏离。航线平行、同一高度或者不同高度飞行的2架航空器,因此可能发生小于设定间隔标准的“碰撞”。各个方向碰撞发生频率之和,就是碰撞风险(Collision Risk)。如果碰撞风险低于制定的目标安全等级(Target Level of Safety,TLS),就认为设定的间隔标准可接受。TLS需要针对不同运行场景和安全管控目标确定[29]。Reich模型及后续改进,与TLS共同构成间隔标准研究基本范式。自20世纪60年代诞生以来,先后用于洋区航路侧向间隔和组合间隔、程序管制纵向间隔、高度层垂直间隔、近距平行跑道进近间隔标准评价和缩减研究[30]。1998年,该方法经ICAO Doc 9689向全球推荐。中国基于该标准,成功实施了垂直间隔标准评估和缩小垂直间隔实践。实践中的成功应用,推动该框架成为后续研究基础[31]。
3.3 认识空中交通管理体系(20世纪90年代中期—21世纪初)
20世纪80年代,伴随飞行量快速增长、空域结构日趋复杂,空中交通管理组织规模持续扩大,管理难度持续增加。与此同时,航空公司和旅客对运行限制、航班延误抱怨越来越多。在空中交通管理中引入新理念、新技术已经成为各方共识。1997年,FAA推出“自由飞行”计划。该计划虽然推进不利,但政府主导、大力推动的空管系统整体升级计划,还是极大带动了学科发展,对空中交通管理问题全面研究由此起步。
3.3.1 空中交通管理系统架构
1983年,ICAO成立新航行系统(Future Air Navigation Systems,FANS)特别委员会,探讨将卫星技术用于航空运输可行性。1991年ICAO第十届航行委员会上,FANS委员会提出,空中航行系统由通信(Communication)、导航(Navigation)、监视(Surveillance)和空中交通管理(Air Traffic Management,ATM)等几个部分组成,缩写为CNS/ATM,如图2所示[32]。
CNS/ATM定义了空中交通管理的基础语境,影响深远,很多国家都是按照这一框架调整、甚至重构了整个管理系统。从学科角度看,这一定义细分了研究领域,为学科发展打下基础。
CNS/ATM定义虽然将空中交通管理做出细分,但没有明确各组成部分之间逻辑联系。这一认识上的不足,体现在“自由飞行”项目开发的管制员辅助决策工具——终端区自动化管制系统(Center-TRACON Automation System,CTAS)中,功能庞杂、适用性差、操作难度大。正因为发现这一认知上的不足,美国国家航空航天局(National Aeronautics and Space Administration,NASA)、FAA投入资金,开始支持空中交通管理体系研究。
1997年,美国波音公司Bergemeister带领的研究团队,经过细致的调研,完整定义了空中交通管理功能架构,如图3所示[33]。该架构细致梳理了20世纪20年代以来,尤其是雷达管制出现后,在运行中逐渐形成的空中交通管理体系,明确定义了各控制环节和相互之间关系,迈出系统认识空中交通管理问题的重要一步。2005年,Haraldsdottir团队[34]推出新一代功能架构。该架构面向容量需求,以航迹为核心,将FANS委员会定义的ATM功能,拓展为空域管理、流量管理、交通管理、间隔管理、信息管理等5个部分,如图4所示。这一框架通用性更强,ICAO全球空中交通管理概念中,也借鉴了这一定义,见图5[35]。

图2 空中交通管理概念构成[32]

图3 空中交通管理功能架构[33]
3.3.2 空中交通工程学科
1997年,GDP模型提出者Odoni[36],在美国航空运行研究卓略联盟(National center of EXcellence for AviaTion Operations Research,NEXTOR)成立大会上,提出有待研究的空中交通管理问题包括:① 当前系统特性;② 不确定性、波动性、非线性;③ 计算机仿真模型;④ 各利益相关者的目标、行为和交互;⑤ 安全、人因和自动化。从学科角度,以上内容整体规划了研究对象、研究问题和预期成果,成为空中交通工程学发展中1个重要里程碑。
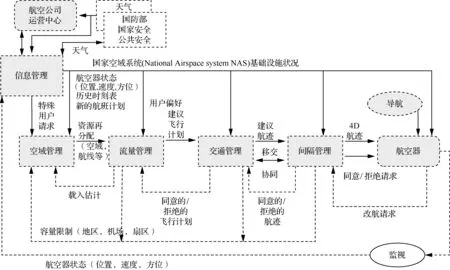
图4 面向未来容量需求的新一代空中交通管理功能架构[34]

图5 ICAO 提出的全球空中交通管理概念[35]
此后2年,NEXTOR多位专家,通过现场观察、问卷调查、当面访谈、采集运行程序和运行数据,于2000年前后提出机场场面交通管理架构[37-38]。与Haraldsdottir架构相比,新架构颗粒度细化到管制席位,同时采用排队论模型、网络模型等数学方法描述,实现了系统功能模型与数学模型的有效衔接,为后续学科研究打下坚实基础。
2000年前后是空中交通工程学科发展的关键时期。这一阶段美国形成了稳定的投入机制和研究团队,前期积累的运行经验和容量、安全方面的研究成果也纳入到统一体系之中,学科研究对象、研究内容和研究方法逐渐成型。空中交通工程学科从此诞生。
3.4 数据驱动提升(21世纪初开始)
1993年,美国交通部Volpe研究中心Gilbo[39]将单位时间内(根据机场流量大小可以取15、20、30 min)机场进场、离场流量标注在直角坐标系中,发现所有点都落在1个凸多边形区域内,由此发现机场容量关键特征——跑道容量包线(Runway Capacity Envelope)[39]。空管数据研究虽然不少,采用如此简单方法,做出如此重要发现的却不多见。
1999—2005年,围绕总统提出的国家航空安全目标,NASA开展航空系统安全监视与建模(Aviation System Monitoring and Modeling,ASMM)项目,计划自动采集运行数据,判断参数间关系,建立系统工作基线状态;连续检测偏离基线状态事件,对航空安全事故做出预测[40]。以上方法论虽然在航天飞机安全管理上成功应用,但在规模更大、情况更复杂的空管系统中应用效果却并不理想[41]。即便如此,ASMM项目突破了传统的、偏静态的安全研究方法,在基于数据直接分析安全态势方面做出了探索。
基于数据研究终于在2010年前后取得实质性进展。这主要得益于两大关键进展:① ADS-B数据广泛使用,研究者可以方便获得航空器飞行轨迹数据[42];② 机器学习方法快速发展,为研究者提供了成熟方法库。与ASMM项目立足人工建立的多因素安全预测模型不同,机器学习方法可以发现隐藏在数据之中关联性,实现从数据到知识的跨越[43]。
3.4.1 基于机载飞行数据的异常检测
飞行过程中,受飞行员误操作、危险天气等因素影响,航空器会在很短时间内出现速度、高度等飞行状态参数异常和近地、相撞告警等安全性提示。机载飞行数据记录仪虽然可以完整记录这些信息,但由于飞行范围广、数据量大、参数关系复杂,传统的、基于预设参数的超限检测方法很难发现潜在的安全风险。
2011年,MIT的Hansman[44]开创性的提出了航班状态向量构建方法和分析步骤,迈出了用机器学习方法研究航空安全问题的第1步,为后续研究奠定了基础。2016年,同为NEXTOR成员的Nanduri和Sherry[45]简化了航班状态向量构建方法,提出了基于循环神经网络(Recurrent Neural Networks)的探测方法,并成功检测出潜在异常。后续研究表明,依据上述原理,构建更为完整的状态空间,引入更新的探测方法,有望深入挖掘隐藏风险[46]。此外,在按照时间序列分析记录仪数据的同时,针对某些特殊运行场景,如特定机场起降、特定飞行阶段开展异常探测研究,也有其独特价值。
3.4.2 基于航空器轨迹的异常检测
与基于机载飞行数据的异常检测关注单机不同,基于轨迹数据的异常检测研究,借助空管一/二次雷达、ADS-B等提供的航空器经纬度、气压高度、地速、磁航向数据,研究某一空域内多机行为。2011年,NEXTOR专家Feron等[47]主持开发AirTrajectoryMiner航迹分析工具。基于历史轨迹聚类得到轨迹分布模式,判断新轨迹与之偏差,同时提醒管制员关注。该工作基本上延续了ASMM项目思路,也因此无法避免类似的不足。
2010年后,随着S模式空中交通管制雷达信标系统(Mode S Air Traffic Control Radar Beacon System,简称Mode S雷达)应用,除传统语音外,地面可以通过低空数据链,获得滚转角、航迹角、真空速等更为精细的飞行数据,为异常检测提供了新选择[48]。法国学者Olive和Basora[49]将两者结合,聚类ADS-B等传统轨迹数据得到交通流,从Mode S雷达数据中提取交通流中的异常事件。这一研究方案兼顾两类数据特点,数据需求和计算量也远小于机载数据分析方法,适用性更强。从大数据分析本质上看,不断提升数据种类、数据量和计算能力,始终是提高探测准确性、实现预测的必然要求。
3.4.3 基于航空器轨迹的交通流研究
早期交通流研究中,只能通过记录航空器通过固定路径关键节点(如停机位、跑道入口、起始进近定位点、管制扇区移交点等)时间,统计交通流量,关键节点之间的航空器行为只能忽略。异常检测研究中已经发现,聚类轨迹数据可以得到原本被忽略的路径结构,交通流研究由此获得全新视角。
2016年,MIT教授Hansman[50]等,联合推出基于轨迹的交通流研究方法论。该方法突破了从固定节点统计流量的传统,提出了从轨迹数据中提取实际交通路径和路径上流量的研究框架,在充分兼容传统方法同时,也留出离群航班研究空间。美中不足在于,该方法从交通流中仅提取了流量特性,忽略了交通流交互这一更具价值的问题。这一缺憾很快被弥补。2018年,Hansman等[51]在研究纽约、香港、圣保罗机场终端区交通流时,不仅采用效率、可预测性指标评估每条交通流,同时引入航迹管道(Trajectory Tubes)概念,用航迹管道交叉体积,衡量航迹间干扰。至此,基于轨迹的交通流研究框架基本形成。
3.4.4 基于数据的预测
除异常检测、交通流研究外,大数据分析方法在空域流量、航空器航迹预测等方面也得到应用。与地面交通人、车出行随机性强不同,由商业运输航班为主体构成的空中交通计划性很强,交通管理部门可以在航班起飞前1 h得到包含起降机场、起降时间、飞行航线等信息的飞行计划,因此流量预测主要采用以计划航线和计划时间为基础,考虑时间波动的预测方法[52]。该方法用飞行计划中固定航路结构,代替交通流实际走向。这一差别决定预测结果仅适用管制扇区、机场等较大区域的流量预测。
20世纪80年代,CTAS工具研制时,NASA就提出先用飞行动力学模型预测航迹、再预测流量的思路[53]。该方法需要完整采集各机型飞行动力学参数,精确描述进场飞行程序,使用复杂、适用性差。后续研究转而引入管制员意图信息,采用线性随机系统方法,预测航迹状态空间变化概率[54]。2015年以后,采用机器学习方法,直接从历史轨迹数据、飞行程序数据中,学习得到单机、多机航迹逐渐成为热点。与前面两种方法相比,后者可以量化管制员引导、多机交互等因素,预测鲁棒性更好[55]。
除航迹预测外,欧美学者还尝试从分析影响因素出发,预测扇区高峰流量、跑道占用时间等运行参数,同样取得不错效果[56-59]。
3.5 小 结
伴随航空器诞生和空中交通管理发展历程,空中交通工程学从观察运行起步,经历近70年发展,研究对象、研究问题、研究方法已经基本明确。2010年以来快速发展的机器学习、大数据分析技术,则带来全新观察视角和研究方法。与此同时,虽然面临交通需求持续增长的巨大压力,以及SESAR和NextGen计划的强力推动,全球空中交通管理系统仍然维持20世纪50年代形成基本架构,没有充分发挥卫星导航、ADS-B等新技术带来的发展赋能。这一现象暴露各方对空中交通管理本质和规律认识还不成熟,整体仍处于摸索阶段。正因为如此,将学科研究成果与工程实践相结合,形成空中交通工程学知识体系、研究范式,将对丰富交通工程学科内涵、推动空中交通管理实践发展,奠定坚实基础。
4 空中交通工程学
4.1 定义及研究对象
从道路工程学科派生出来的交通工程学科,将人、车、路作为最主要的研究对象,研究内容包括交通特性分析技术、交通调查方法、交通流理论、道路通行能力分析技术、道路交通系统规划理论和方法[60]。
参照这一定义和交通工程学前期研究,空中交通工程学将人、机、域之间相互作用关系,作为最主要的研究对象,通过研究各要素相互间内在作用规律及其最佳配合,建立空中交通规划、设计、运行控制和管理理论方法,以及有关设施、装备、法律和法规等,使空中交通更加安全、高效、低碳、环境协调。如图6所示。
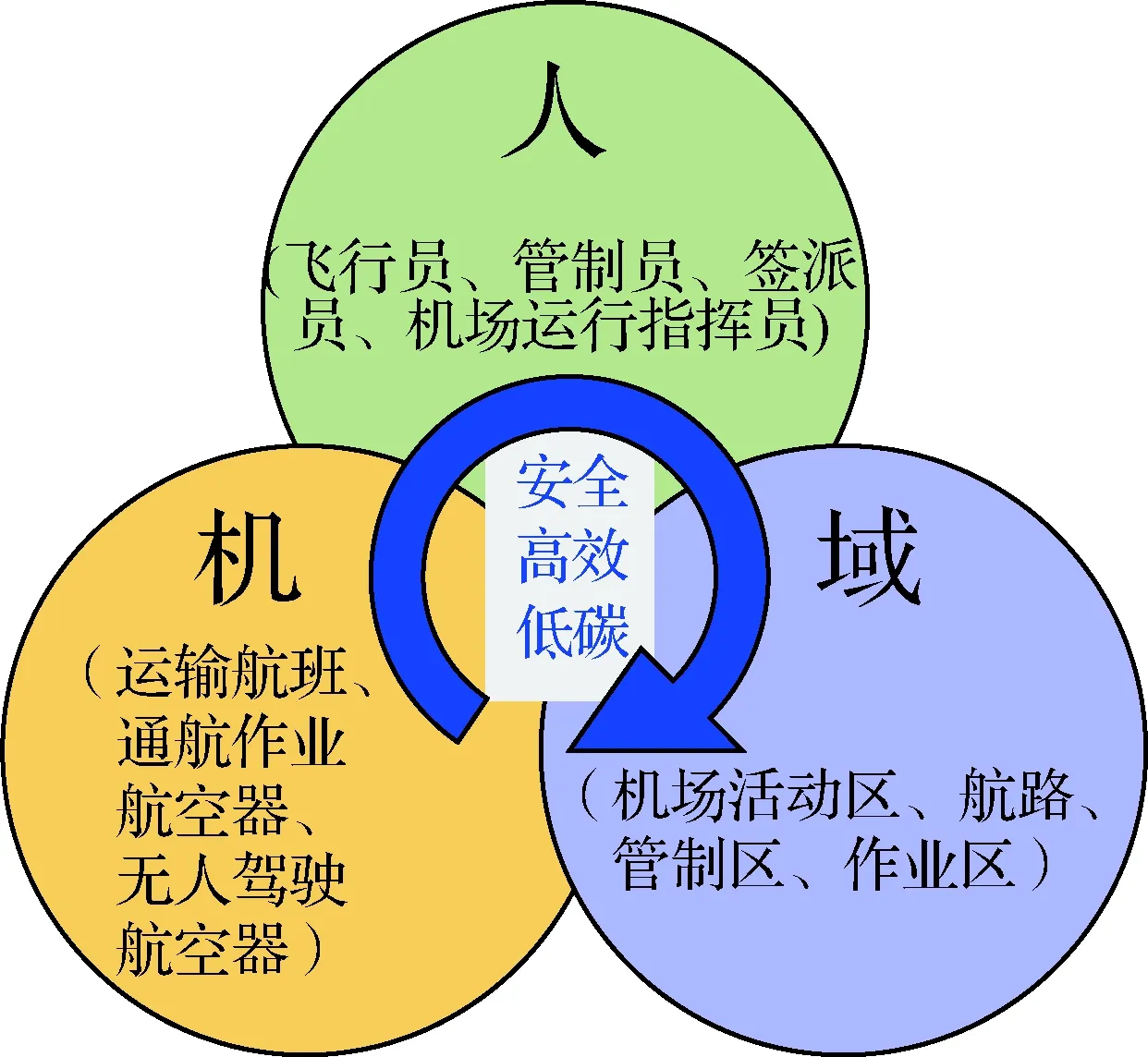
图6 空中交通工程学组成要素和研究目标
4.1.1 人-机-域
“人”是指航空交通运输活动直接参与者,包括管制员、航空器驾驶员(以下简称飞行员,Pilot)、飞行签派员(以下简称签派员,Flight Dispatcher)、机场运行指挥员等,这些交通管理人员共同对航空运输的全过程实施管理。中国民用航空局(Civil Aviation Administrator of China,CAAC)要求飞行员、管制员、签派员持执照上岗。机场运行指挥员必须满足国家职业技能标准。在如图1所示的空中交通管理概念中,除被授权或者面临紧急情况,飞行员必须按照管制员指令执行;签派员主要负责航班起飞前航迹规划;机场运行指挥员则负责机坪以内的交通指挥,机场之间的空中交通活动完全由管制员控制。因此,本文将主要探讨研究管制员行为。
“机”主要指按照ICAO规则运行、从事旅客和货物运输的比空气重的、固定翼航空器(Aircraft)。ICAO体系中,将这一类航空器及其承运的运输任务统称为航班(Flight)。达到目的地机场、运输任务结束后,航班结束(也称为飞行计划关闭),承运航空器转而承担其他运输任务,变为“另一个”航班。航班是整个航空运输体系的核心,编制班期时刻表、飞行准备、飞行实施、飞行总结的组织实施流程十分严密,各个环节均由专职单位、按照既定的工作程序实施,并接受监管。涉及国外大型枢纽机场的航班计划,则需要由国际航空运输协会(International Air Transport Association,IATA)出面组织协调。中国航班管理流程如图7所示。
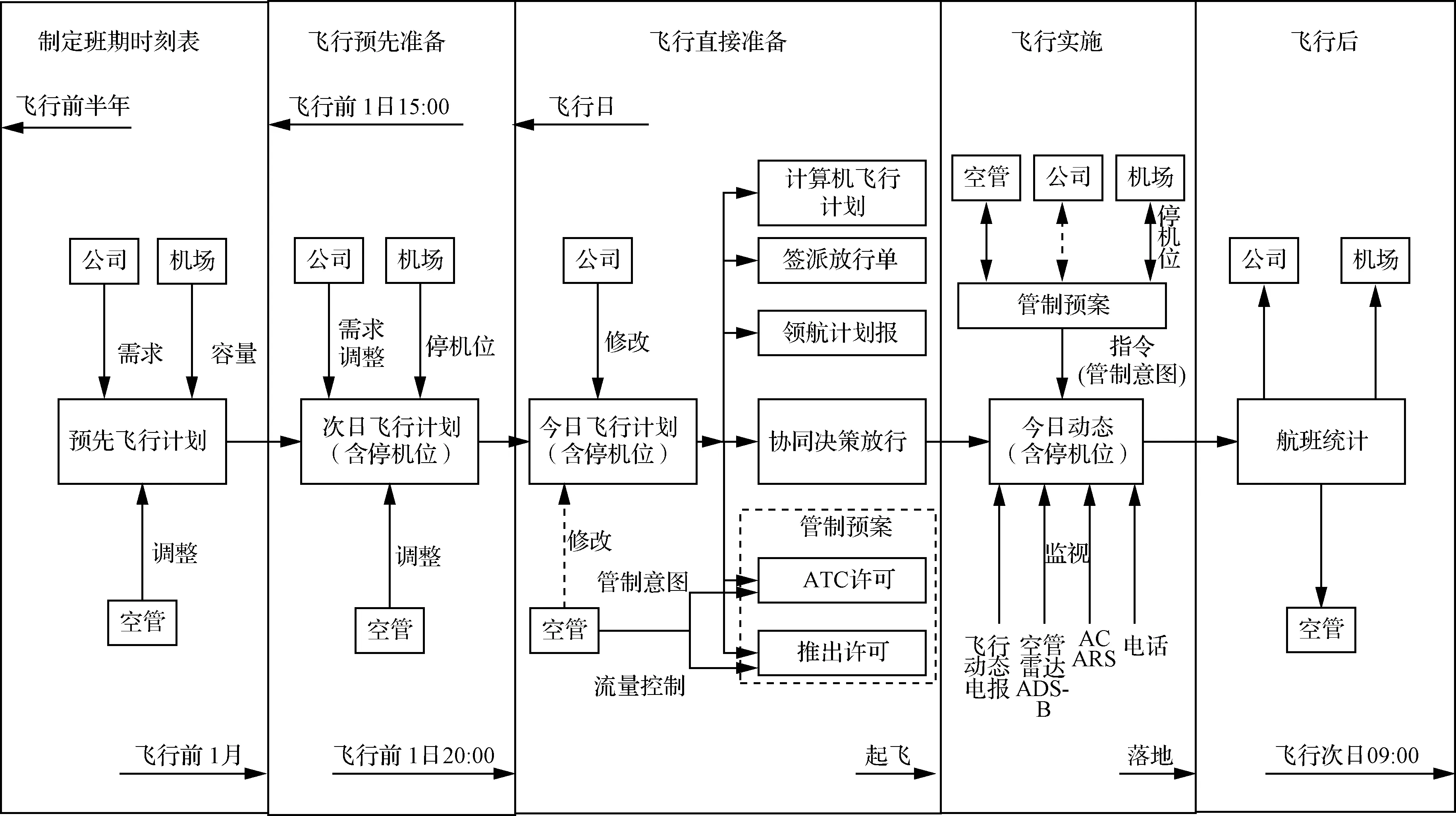
图7 中国航班管理流程
为管理航班管理流程中(也称为航班全生命周期)诞生的大量数据,2000年,美国知名航空咨询机构MITRE公司,将计划的、正在执行的和已经执行过程中产生的信息,统一封装为航班对象(Flight Object),作为各类空管系统的共同参考[61]。在此基础上,ICAO、FAA、欧洲航空安全组织(Eurocontrol)联合定义了航班信息交换模型(Flight Information eXchange Model,FIXM),作为航班信息交换国际标准[62]。
航班无疑是航空运输管理和支持技术研究关注的核心。此外,承担飞行训练、农林作业、空中旅游等任务的通用航空,由于其作业飞行方式特殊、作业区域远离交通密集区域,交通研究需求并不突出。目前正在兴起的无人驾驶航空器,则限于篇幅不再深入。因此,选择航班代替航空器作为空中交通工程学研究重点。
“域”是指航空器地面(水面)活动、进场和离场,以及机场间飞行使用的区域,通常包括机场、航路、管制区等。早期航空邮件运输实践已经表明,没有目视参考点、应急起降点、途中加油点、航路信标台、无线电通信站等设施的支持,天然地面和大气空间根本无法保证飞行安全。美国第一部商业航空法案(Air Commerce Act,1926)因此明确提出由联邦政府规划建设可航行空域(Navigable Airspace),在可航行空域中划设航路的要求。虽然“看不见、摸不着”,但与地面道路一样,空中航路必须完成大量基础设施建设才能安全使用。此外,从空中规则逐步发展起来的机场管制、程序管制、雷达管制,进一步丰富了“域”内涵,即空中交通工程中的“域”是接受空中交通管制服务、在大量助航设施支持下,可保证飞行安全的空域和机场场面。
基于ICAO Annx11中定义概念体系,空中交通工程学“域”概念内涵及发展过程,如图8所示。从图8中可以看出,航路、终端管制区、管制机场、管制地带等常用行业术语内涵。为在后续研究中简洁表述,本文推广ICAO Annex11[63]中管制区(Control Area)概念内涵,用其统一表示接受空中交通管制服务、具备航行能力的航路、终端管制区、机场管制地带和管制机场活动区。
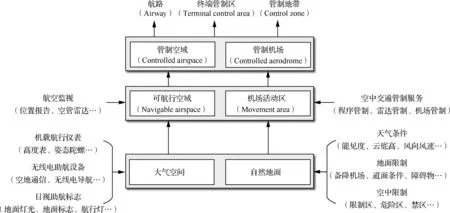
图8 空中交通工程中“域”概念构成
经过以上讨论,空中交通工程学人-机-域研究对象,可以缩减为管制员-航班-管制区。本文将据此讨论三者之间相互作用关系。
4.1.2 管制员-航班-管制区
简化后的空中交通工程学组成要素及其相互作用关系,如图9所示。交通工程学是研究各组成要素相互作用关系的科学。与架构于“物理-社会-信息”三维空间的道路交通系统一致,空中交通管理系统同样架构于助航设备构造的物理空间、管制员和管制单位构造的社会空间和航班信息构成的信息空间,组成要素之间交互关系因此不可能如自然科学系统那样完全符号化、形式化和公理化,而是在更多情况下,表述为某种情境下,关系原则、行为准则与技术原理的混合体。基于这一认识,如图9所示,“管制员-航班-管制区”交互关系如下:
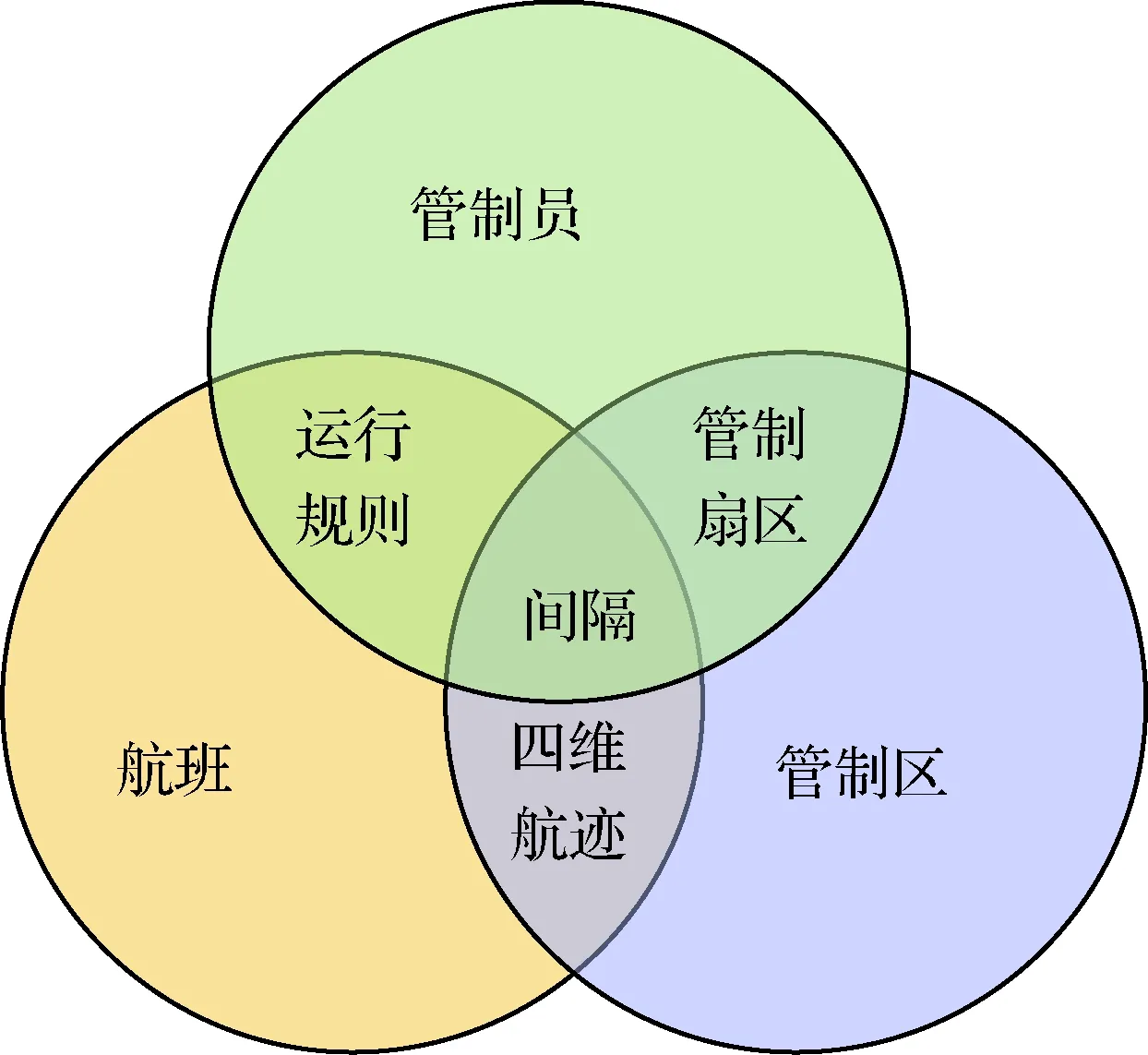
图9 聚焦的空中交通工程学组成要素及其相互作用关系
1) 运行规则
航班运行管理职责分工、运行程序、飞行程序和调配原则统称为运行规则,如表2所示。
表2所示规则中,IFR飞行规则直接确立了空中飞行、地面指挥的管理体制,是全部运行规则中最为基础、最为核心的内容。从20世纪90年代起,随着飞行量迅速增长,管制员逐渐成为制约交通增长瓶颈。另一方面,随着机载防撞系统(Airborne Collision Avoidance System,ACAS,功能与TCAS类似,本文按照ICAO标准,下文统一使用ACAS)、ADS-B-in等机载防撞、交通态势感知设备出现,航空器自主防撞能力大大提高。尝试在航班IFR运行过程中,融入更多VFR阶段,由飞行员承担部分防撞职责,成为各国飞行规则使用的总体趋势。
2) 管制扇区
管制扇区是由1个席位(通常由1~2管制员配合值守)提供空中交通管制服务的最小管制单元,航路、终端管制区、机场管制地带和管制机场活动区的空中交通管理,都是由事先划分的、多个管制扇区配合实施。《民用航空空中交通管理规则(CCAR93)》[64]要求,必须同时考虑管制员工作负荷、空域航行能力、空中交通态势等诸多因素划设管制扇区。
管制扇区是空中交通管理的直接实施者,交通拥堵、交通事故都与所在的管制扇区直接相关。另一方面,管制扇区将连续的交通流分区管理,将完整的航班飞行过程分段控制,必然带来繁复的协调工作和整体效率的降低。正因为如此,管制扇区划设及其内部交通管理问题,一直是学术研究和空管实践关注重点。
3) 四维航迹
四维航迹(Four Dimension Tracjectory,4DT)是指用经度、纬度、高度和时间等4个维度关键点定义的,航班从起飞机场停机位到目的地机场停机位的完整飞行过程。在整个航班生命周期中,随着各类信息的不断加入,四维航迹也随之不断更新。如图10所示。

表2 表征管制员-航班交互关系的运行规则

图10 四维航迹生成和更新流程
从图10中可以看出,4DT集成了航班在管制区中移动的完整信息,是空域航行性能、航空器性能和空中交通管理共同作用的结果。正因为如此,延误更少、效率更高、排放更少的4DT是高水平空中交通管理的重要体现,也是科技研究和工程实践的努力方向。ICAO规划的TBO,同样以此为基础。
4) 间隔
间隔(Separation)是由管制员而指定的,2架或者多架航空器之间的纵向、横向或者垂直距离[65]。为保证安全所需要的最小间隔称作间隔标准(Separation Minima)。为避免撞机、撞地,在航空器之间、航空器与地面之间建立间隔确保安全,是最自然、最有效的交通管理方法,间隔因此被成为安全间隔。随着交通流管理的出现,以减少拥挤为目标的间隔控制则成为新的需求。空中交通管理间隔分类如表3所示。使用中常常需要考虑几类间隔要求,配置两架航空器之间的距离。

表3 空中交通管理间隔分类
由于涉及安全底线,间隔始终是空中交通管理研究与实践最受关注的内容。各国工作规则中,普遍将小于规定的间隔标准作为认定不安全事件和事故的重要依据。理论研究中,则初步揭示出间隔标准是碰撞风险和设定的目标安全等级共同作用的结果。
随着交通量持续提升,持续降低间隔标准,提升空域容量需求愈加迫切。实时掌握航空器周围大气条件和交通态势,加强飞行员、管制员动态感知和分析能力,动态配置间隔成为新的发展方向。
基于空中交通工程学定义,初步提炼出运行规则、管制扇区、四维航迹和间隔等空中交通工程学基本研究对象,这一概念上的梳理,为认识纷繁复杂的空中交通管理问题奠定基础。下面将以构造学科理论体系为目标,进一步探索学科核心概念、基本原理和科学问题。
4.2 核心概念与基本原理
从1947年第1篇论文开始,“问题驱动”成为空中交通工程学科近80年发展主线。欧洲空管专家、SESAR前项目主管Meckiff总结:2000年以前关注延误和容量,2002年德国Überlingen空难之后安全研究成为中心,2008年经济危机、2010年冰岛火山喷发大面积航班取消则将运行效率、航线网络韧性与危机管理摆在首位。在解决大量实际问题的同时,对学科自身特性的认识却仍待完善。美国空管专家、佐治亚理工学院Clark[66]就指出,从理论层面看,空中交通流动性特征、系统管控架构等领域基础性问题仍待深入研究。
近10年来,中国空中交通量增长迅猛,目前已与欧洲基本持平,与美国快速接近。实践中的问题需要理论指导,所积累的经验也需要理论升华。在新的形势下,吐故纳新、吸收相关学科理论与工程实践经验,结合中国空中交通管理特点和环境,形成中国空中交通工程学理论体系,使之更好地指导学科发展和行业实践,是学科自身发展必然要求。本文将根据“核心概念—基本原理—科学问题—关键技术”学理链[67]。构建空中交通工程学理论体系的基本架构。
4.2.1 核心概念
概念是人们对客观事物本质属性认识的凝炼,是对事物本质与内在关系抽象与凝炼的语言表述,理论是以概念为起始点向各个维度的延展。越能体现研究对象本质属性的概念在理论体系中越具有根本性和实质性,称为核心概念。提出核心概念是构建理论体系的“第1步”。
在空中交通管理领域,多部国际、国内标准中,已经提出机场、管制区、机场活动区、航迹等大量定义,形成了领域知识集合。但从核心概念角度看,现有定义多源于从用途、位置、受管制情况等角度,对现实事物分类命名;既缺少从交通管理角度,对事物本质属性的抽象,也缺少对各类事物共同属性的凝练,同时还隐藏了相互之间逻辑关系。例如,跑道和管制区位于不同地理位置,分属不同管制单位,看似差别巨大;但从交通组织与管理角度看,却同属有容量属性的交通单元,非常相似。因此,本文尝试从构造理论体系要求出发,进一步凝练空中交通管理系统各组成部分本质属性,提出以下6个基本概念:
1) 飞行规则。在ICAO构建的空中规则体系中,飞行规则直接决定了空中交通管理体制,即飞行员承担防撞责任的VFR、管制员承担防撞责任的IFR。世界各国建设和运行的庞大地基空管系统,无不源于这一基本划分。
2) 交互网络。管制扇区将管制空域、航班飞行过程切割成一个个独立管理的分区。伴随航班飞行进程,沿航迹各管制扇区移交管制权过程,构成连续的交互关系,与空域组织与管理、机场运行管理、流量管理、交通同步等交通管理过程交织,形成连接各交通管理单位的交互网络。
3) 复杂性。Odoni[36]提出的空中交通系统不确定性、波动性、非线性特征,实践中对人因可靠性、管制扇区内多机交通行为、航线网络韧性的认识,以及交通系统普遍具有的自适应、自组织、边界开放特征,都说明了空中交通系统的复杂性。
4) 安全风险。对于影响航空器安全的危险(Hazard),安全风险就是经过预测得到的,危险及其后果的严重性和出现概率[68]。根据严重程度,我国将危险细分为一般差错(Error)、严重差错(Serious error)[64]、一般事故征候(Incident)和严重事故征候(Serious incident)[69]。安全风险是对危险及其后果的量化度量。为了避免危险发展演化成为直接导致人员、财产受损的事故(Accident),空中交通管理主要的任务就是控制安全风险[70]。
5) 容量。《民用航空空中交通管理规则(CCAR93)》[64]提出,空中交通管制容量(简称容量)通常以指定空域或机场在一特定时间内最多能够接受的航空器数量表示。管制空域和航路结构、管制方式和设备、使用该空域的航空器导航精度、与天气有关的诸种因素以及管制员的工作量等因素都会影响容量。
6) 效率。单个航班在门到门的过程中按照自己计划的起降时间和航迹运行的能力[71]。延误是最常用的效率评价指标,也是从时间角度评价效率的重点。从空间角度看,航班偏离计划航迹,偏离省时、省油、减排的优化航迹,都可以看作效率降低。
以上6个基本概念是空中交通管理理论基石,也是应用研究、技术开发的出发点。例如,20世纪40年代容量概念出现后,先后衍生出跑道容量、管制扇区容量定义,以及解析计算、计算机仿真、工作负荷测量等容量评估方法。2010年冰岛火山喷发造成大面积航班延误之后,航路网络容量成为新的关注点。20世纪60年代,安全风险中的碰撞风险被定义后,很快与交通场景相结合,出现航空器垂直、水平方向碰撞风险,航空器与地面障碍物碰撞风险评价模型,以及空域高度层、平行航线、飞行程序保护区安全性评估程序和方法。
4.2.2 基本原理
实践中看似不相关的措施往往源于共同的思考。例如,设立单向航路、用高度层将东西向交通流分隔、指定不同的进出点将进离场交通流分开,都可归纳为通过分隔交通流、降低复杂性。在同一管制扇区配备2名管制员(也称“双岗制”)[72],航空器飞越障碍物时配备超障余度,则是通过增加冗余、减少碰撞风险。
将空中交通管理活动中,管理主体行为基本准则与管理活动运作规则的论断与定律进行归纳,将实践经验固化与基于基本概念进行逻辑推理形成的知识进行总结,就形成理论体系中的原理。原理是理论体系中逻辑推导功能的体现,类似几何学中的公理或者定理。基本原理是通过逻辑推导构造理论体系的“元功能”,可以衍出更多、更具体的逻辑判断,类似公理。
作为1个架构于“物理-社会-信息”三维空间的交通系统,空中交通管理系统基本原理符号化、形势化和公理化表述涉及面很广,很多情境之下只能表述为1种关系原则和行为准则,因此,采用文字表述以下5个基本原理。
1) 复杂性降解原理。复杂性是空中交通系统基本属性。全球互联的空中交通系统中发生的各种事件,往往是多种不确定因素共同作用的结果,常常会导致不可知的影响。因此,设法降低交通复杂性,就成为控制风险成为必然选择。2013年底完成的 “京昆空中大通道”空域调整中,以既有航路航线为主体,调整个别航线交通流走向、新增部分航线段,组合成上下行分离、全部连通的组合通道,消除了上下行交通的对头冲突,实现沿途城市之间往返飞行分离。这一秩序上的“梳理”,减低了交通复杂性,取得安全风险减低49%、管制员工作负荷降低29%、容量提升40%的显著效果[73]。
2) 冗余原理。空中交通系统安全是技术因素、人为因素、组织因素共同作用的结果[74]。其中,技术因素、人的理性行为具有规律性,相对容易界定;但人的非理性行为和更为复杂的组织因素,定量描述都十分困难。采用冗余原理,应对不确定因素带来的安全风险成为必然选择。前文中提到的“双岗制”、超障余度,以及建设的空管自动化主用系统之外的应急备份系统,都是冗余原理的体现。除减少安全风险外,航班时刻表编排时,在航段运行时间、航班过站时间中也加入冗余,避免遭遇延误后影响后续航班正常性。
3) 信息综合原理。采用不同管制扇区,管理同一航班不同飞行阶段的分布式管理方式,必然产生建立全球通用的航空数据标准,实现信息综合,支持全面态势感知和交通管理的需求[75]。ICAO已经规划了飞行与流量信息协作环境,作为新一代空中交通管理系统基石[76]。今天的空中交通管理系统中,也普遍具备了飞行计划集中处理、监视雷达数据联网等功能。
4) 管理协同原理。在空-地、地-地的分布环境中,满足不同交通参与者要求实施交通管理,不仅需要信息综合,更需要管理协同。除航班进出不同管制扇区时的移交条件协商这一最常见的协同外,更大范围、更多参与者构成的协同还有很多。20世纪90年代,美国管制部门和航空公司共同实施离场航班协同决策(Collaborative Decision Making,CDM)程序,通过互换离场时隙使得机场容量利用率显著提升。进入21世纪后,欧洲机场各地面保障单位,为控制航班过站时间,推出了预计撤轮档时间协商程序,被称为机场协同决策(Airport CDM,A-CDM)。2010年后,中国CDM系统、A-CDM系统建设相继启动,同样效果不凡。这些实践均表明,协同已经成为空中交通管理的客观要求[77]。
5) 效能化原理。从效能角度研究空中交通管理系统,其目的是用定性或者定量的效能变量描述系统,同时寻找效能变量之间相互作用关系(增强或者干扰);最终围绕绩效目标,建立绩效变量之间的因果关系[71]。基于效能的方法,是各国在空中交通管理实践中总结出来的、复杂系统管控方法。早在20世纪40年代,面对五花八门的机场布局和运行管理方式,无章可循的美国机场交通管制咨询委员会提出5个效能指标,借此发现了短板和改进方向。2009年,ICAO公布《全球航行系统效能手册》(Doc 9883)[71],定义了11大类关键效能领域,再次规划借助效能方法,推动各国系统升级。
4.2.3 逻辑关系分析
6个核心概念、5个基本原理之间逻辑关系如图11所示。图中用矩形框表示核心概念,用椭圆形框表示基本原理,带箭头直线表示两者间的逻辑关系。
核心概念来自系统的本质属性,是构成理论体系的基石,从研究角度看,则是理论探索应该聚焦的问题。而核心概念之间逻辑关系,正是问题研究中应该遵循的脉络。如图11所示,对不同空域与机场环境中空中交通行为、空中交通管理活动的研究,分别驱动了2条逻辑链的延伸。复杂性揭示出交通行为的不确定性,安全风险和容量则分别从两机相撞、多机冲突等角度,认识复杂性的某一方面。空中规则确定防撞责任后,管制员能力限制要求细分管制区,随细分而来的则是大量交互行为和整体运行效率的降低。此外,复杂性带来的管制员交互,交互耗时带来容量下降,防撞调配带来的效率下降,也将两条逻辑链连接起来。

图11 核心概念与基本原理之间逻辑关系
核心概念定义了领域问题,基本原理则通过实践总结、逻辑推导,给出了解答思路。分布的交互网络带来信息和人员的分散,加强信息综合、人员协同是必然的选择。应对包含诸多不确定因素的复杂性问题,设法降低复杂性,或者增大裕度应对不确定性,同样是合理的选择。效能化原理则是解决人-机-环-管等要素多重交织难题中积累的智慧。
图11虽然建立了核心概念与基本原理的逻辑关系,但从前文分析中不难发现,很多问题仍待深究。例如,复杂性如何效能化,各类复杂性都可以降解吗,交互网络能否效能化?这些问题正是构建理论框架过程中,用核心概念描述,由基本原理衍生出的科学问题。
4.3 科学问题
理论体系中的科学问题是一类用概念描述并由基本原理推导衍生出来的具有学术品质和理论价值的研究问题[67]。以核心概念与基本原理为基础,提出3个科学问题:① 空中交通管理系统复杂性建模;②空中交通管理组织与协同模式;③ 空中交通管理系统安全风险演化与防范机理。
4.3.1 空中交通管理系统复杂性建模
从各自研究问题和现场出发,物理学、化学、生物等学科都对“复杂性”概念给予描述和界定。虽各不相同,但研究对象普遍呈现与环境高度交互、组成要素自适应、整体行为自组织等特征[78]。卢守峰等[79]归纳城市交通系统复杂性时,又增加了全系统可以处于非平衡态等特征。
空中交通管理系统复杂性研究源于管制扇区容量研究。1976年,Schmidt[80]发现仅用航空器数量无法准确衡量管制员指挥工作量后,提出引入管制过程“复杂性或者难度”权重系数加以修正。复杂性研究由此启动。1995年,FAA公布的研究报告中,从分析管制员工作负荷影响因素出发,提出了空中交通管理系统复杂性构成要素[81]。综合后续研究,空中交通管理复杂性影响因素如图12所示。
空中交通管理活动中,空中交通复杂性是管理复杂性产生的源头,空域航行性能和认知复杂性都会增加或者减少管制员工作负荷。对比地面交通管理系统,三者分别对应人车交通行为、交通设施水平和交通管控能力,管制员工作负荷则代表交通管理带来的资源消耗。
除3.2.2节已经介绍的管制员工作负荷外,有关概念含义及研究现状如下:
1) 认知复杂性
认知复杂性,即管制员对空中交通态势认知难度。如前文所述,从20世纪60年代开始,在交通拥堵压力推动下,欧美等国就着手研究管制员工作负荷测量方法。20世纪80年代初,已经形成统一的国际标准。1994年, RTCA提出“自由飞行”概念后,被动测量方法显然无法使用。

图12 空中交通管理复杂性组成要素
1996年,Pawlak等[82]提出研究交通态势和管制员认知能力关系,建立工作负荷计算新方法的构想。以此为基础,NASA从交通行为分类出发,将管制扇区内航班航向、速度、高度改变次数等作为加权因子,在数量统计基础上,加权计算得到动密度(Dynamic Density,DD),作为工作负荷超标判断依据[83]。动密度研究成功建立了分类交通行为与管制员工作负荷之间联系,其结论已经用于管制扇区容量估计。近年来,尝试用机器学习方法,寻找这种联系的研究成为新的热点[84]。
分析交通行为同时,管制员认知能力研究也在推进。2002年,Hansman等[85]从认知心理学角度,发现管制员面对有结构的交通流时,特别留意某些关键点(如交通流汇聚点),有意识的将航班分组。这一发现说明,面对复杂的交通态势,管制员倾向参考航路航线结构,构建一个结构化的心理模型(Mental Model),以此降低认知复杂性。这一发现说明,管制员并非简单观察、记忆航班群行为,而是经过心理加工,构建了新的交通场景。该成果虽然尚不能回答,管制员面对不同交通态势时的认知工作量,但却基本建立了管制员认知架构与扇区交通结构之间的对应关系,为制定更合理运行规则奠定了基础。
从认知角度开展的复杂性研究,虽然受研究目标限制,其关注点始终置于管制员主观层面,但却开启了空中交通行为分析之门。
2) 空域航行性能
空域航行性能是支持航班按照指定飞行规则和管制方式安全运行的,空域和机场活动区内通信、导航、监视、气象与情报服务能力。该能力代表了保障航空器安全航行和管制员指挥的技术条件。在图1所示的空中交通管理架构中,技术保障能力显然是其中重要一环。
空中交通发展早期,地基无线导航台、空地高频/甚高频电台是主要的航行支持设施。二战之后,雷达迅速成为交通活动监视的主要手段,交通管理技术也借此进入雷达管制时代。受地面台址和作用范围限制,航班飞行只能在有限的航路和机场范围内进行,而且因信号盲区、电磁干扰等原因,通信监视能力迅速下降的同时,给管制员带来额外工作负荷。而扩大飞行范围、提高系统可靠性只能通过不断增加地面台站数量实现。20世纪80年代初,为增加仪表着陆系统引导信号覆盖范围,提升航班进场速度,FAA提出“进近通道”运行概念。在跑道五边方向,构建一个定位精度均匀的扇形区域,航班在其中可以自由选择进近线图,借此取代仪表着陆系统(Instrument Landing System,ILS)标记的、狭窄的下滑道。按照这一概念研发的微波着陆系统(Microwave Landing System,MLS)虽然因频率限制为取得成功,但根据运行需求标记导航性能(Performance Based Navigation,PBN)的技术原理却由此诞生[86]。
20世纪80年代中期以来,以星基技术为代表的新航行系统发展迅速,除极地等少数区域外,全球绝大部分海洋和陆地被卫星导航信号覆盖。同时随着卫星导航地基、星基导航增强技术的完善,按照PBN原理,面向不同飞行阶段定位要求,“订制”不同空域的航行性能成为可能。
20世纪90年代,ICAO采用从运行需求倒推技术系统指标的“逆向方法”,先后提出所需导航性能(Required Navigation Performance,RNP),所需通信性能(Required Communication Performance,RCP)和所需监视性能(Required Surveillance Performance,RSP)概念,按照不同飞行阶段定位和空地通信需求,定义CNS系统技术指标。这一方式分别量化了通信导航设备设备技术指标,为最终形成统一、量化的空域航行能力奠定了基础。2016年,ICAO提出通信与导航性能相互融合的、基于性能通信与导航(Performance-Based Communication and Surveillance,PBCS)概念,以及与之相对应的基于性能的间隔(Performance-based separation)标准。该工作已经初步建立了空域通信、导航性能和管制间隔标准之间联系。可以预料,更多的空域航行性能指标都会以类似方式纳入交通管理之中,成为标记管理能力的重要标志。2020年,陈志杰团队[87-88]提出数字空域系统概念,启动了对空域航行性能计算问题的全面探索。
虽然早在20世纪90年代,空域航行性能就被列入复杂性影响因素,但相关研究并不多见。其原因在于复杂性研究多关注雷达管制下的管制扇区内部航班交通行为,在这一范围内空域航行性能分布均匀、对航班交通行为影响不大。但随着网络级复杂性问题的出现,以及无人机引发的超低空使用需求,该问题重要性将更加凸显。
3) 空中交通复杂性
空中交通复杂性,即空域复杂性(Airspace complexity),是抛开管制员主观感受,站在客观角度开展的航班交通行为研究,是对空中交通内禀属性(如航班速度、航向、位置)的观察和理解。从图12中可以看出,空中交通复杂性是认知复杂性和管制员工作负荷的源头。
从复杂性概念高度交互、自适应、自组织含义出发,空中交通复杂性研究也尝试从航班群、航班流和交通网络角度,寻找空中交通系统呈现的整体行为。采用的研究路线分为两大类:① 完全从系统最基础的组成要素——航班出发,通过分析航班微观交互行为,把握系统总体特征,也被称作空中交通内禀复杂性研究;② 借鉴地面交通复杂性研究,分别从交通流、交通网络视角,研究某些交通参数时空分布复杂性和演化机制问题。从研究目的看,这2类研究分布针对空中交通管理系统安全风险、容量和效率等本质属性,是空中交通工程学理论体系的重要组成部分。
空中交通复杂性研究框架如图13所示。从图中可以看出,空中交通复杂性研究对象包括以下3类:航班群、一二维航班流、空中交通网络。
航班群是指在同一管制员防撞责任区内活动的、接受指挥的多个航班。如图1所示,空中交通管理系统中管制员取代飞行员,成为航班交通行为的实际控制者。管制员在冲突调配过程中,为了避免产生新的冲突,需要同时兼顾辖区内多个航班,实施整体调配,辖区多个航班也因此呈现一种整体性交通行为。根据管制员能力水平,空域条件复杂的雷达管制扇区中,航班群规模通常小于12架。

图13 空中交通复杂性研究框架
2000年,法国学者Delahaye和Puechmore[89]抓住航班群管理中最关心的冲突与避撞问题,利用航空器i和j相对距离矢量Dij与相对速度矢量Vij,分别表示冲突过程中两机接近度和接近率,以此为基础,度量典型冲突场景中的交通形势及其演化规律,揭示管制扇区整体交通行为的复杂性。本方法源自航班相对位置分析,也因此被称作几何无序性方法或者交通无序性方法。除关注管制扇内部交通外,另一思路是研究新进入航班与内部已有航班的冲突态势,认为复杂性是管制扇区受到扰动后管理的复杂程度[90]。该方法被称作交通扰动方法。上述2个方法,因同源于速度、航向、位置等空中交通内禀属性分析,合称为内禀复杂性研究[91]。
交通扰动研究中,Lee等[90]采用复杂性图示化方法(Complexity Map),显示管制扇区内部冲突态势,随航班进入位置、航向变化情况,为控制航班进入条件提供了直观依据。复杂性图示方法因此成为面向应用的新研究方向。2011—2013年,笔者等[92-93]提出采用空域中,航班保护区重叠情况作为冲突态势度量方法,并构建了跑道五边到场交通复杂性图,作为控制航班进近间隔的依据。近年来,随着自主飞行概念出现,自由航路空域冲突管理成为新的研究重点。王红勇和郭宇鹏[94]在Lee的基础上,除考虑进入位置和航向影响外,新增进入航班航速对栅格空域复杂性影响,同时将复杂性图拓展到水平、垂直方向,较好地揭示了灵活空域复杂性特征,也成为复杂性图研究最新进展。
航班相互迫近是冲突前兆,关注安全风险的复杂性研究自然将其作为重点。但如果进一步分析冲突成因,不难发现在固定的航路航线网络中,路径交叉、汇聚必然蕴含冲突风险,同样值得从复杂性角度研究。2014—2015年,王红勇等[95-96]提出以航班为节点,航班之间连线为边,航班对之间复杂性作为权值,构造管制扇区冲突态势网络,用网络的平均度或者网络拓扑参数表示管制扇区整体复杂性。2018年,Wang等[97]进一步将航路点、航段作为节点引入冲突态势网络,用各节点欧式距离,构建节点间边权值函数,用动态加权网络特性描述复杂性。这些研究在构建航班群冲突态势网络模型基础上,最终实现了航班-管制扇区结合的复杂性研究。
在交通密集的管制扇区中,一架航班冲突解脱机动(如改变高度层、航向、速度等)可能诱发新的冲突。随着时间推进,新冲突诱发新机动过程不断重复,还可能影响更多航班改变位置,从而改变整个扇区交通态势。西班牙学者Radanovic等[98]将这一现象命名为空中生态系统(Aerial Ecosystems)。根据其含义称为冲突解脱生态系统。从形式上看,这一概念与冲突态势网络有些类似,也使用图描述生态系统内航班之间冲突关系[99]。两者最大不同是,前者从整个扇区视角,按照每对航班之间复杂性构建扇区冲突网络;后者从单航班视角,基于所有可能的冲突解脱算法描述航班节点间关系,按照冲突、机动、新冲突、新机动的顺序,随着时间的推进依次构建冲突网络。此外,前者支持管制员整体把握扇区情况,后者可以为当前航班找到1条冲突最少路径。
航班流是指多架航空器移动成列后展现的整体行为,可以用流量、速度、密集度等指标描述。沿同一条航路飞行或者起降机场相同的多架航空器都会形成航空器流。现有研究中,将沿同一方向移动的称为一维航班流,交叉或者汇聚的称为二维航班流。虽然现有航班流研究较少采用复杂性说法,但多篇论文采用Lyapunov 指数等分析方法,发现航班流存在混沌现象。这一过程与经典复杂性研究吻合,因此将航班流特性分析,也纳入空域复杂性研究。
交通流量模型源于采用排队模型分析跑道容量,航班到达率等成为最早的交通流研究。20世纪40-50年代,Bowen[16]尝试从统计数据出发,建立跑道起飞、到场流量分布规律,作为跑道交通流仿真和容量估算的初始条件。这一研究随着跑道容量计算标准和SIMMOD仿真工具完善趋于平静,研究重点也逐渐转向流量预测。前期发现的机场交通流量不确定性特征,在管制扇区流量预测中同样被发现,也成为研究重点[100]。
2010年以后,ADS-B等航班轨迹数据的普及,以及数据聚类方法的成熟为研究提供了便利。各国学者延续前期工作的同时,在航班流量预测上也有所发现。2015年,Simaiakis和Balakrishnan[101]用D/Ek/1排队模型表示航班从推出到起飞离场过程,用运行数据估计了模型参数。该研究重点虽不是交通流分析,但却统计得到了整个离场过程的交通流量分布规律,分析范围和研究颗粒度比早期研究显著提升。2017年,王超等[102]利用最大Lyapunov 指数、递归图和关联维数,从混沌与分形角度对交汇航路交通流量时间序列进行了研究,发现在统计时间尺度为2、5、10、15 min 时表现出混沌特性;随着时间尺度增大,则表现出更强的随机性。与此发现类似,2018—2019年,Zhang等[103]利用非线性方法,对北京首都机场交通流量混沌特性进行识别,发现在统计尺度为10、15、30、60 min 时,起飞、降落、起降总流量时间序列均具有混沌特性,呈现分形特征;交通流量可预测性同时受样本大小和噪声影响,相同预测步长下,可预测性随着样本数据量增加而减小。上述结论,在发现空中交通混沌现象的同时,也可以从理论层面解释美欧日空中交通流量管理系统中,战术、预战术阶段流量统计时间尺度设定为15、20、30 min的原因。
综上所述,交通流量模型以单位时间交通流量作为研究对象,主要用于:① 在容量评估、交通流量预测和管理模型中,基于流量分布特性估计模型参数。这类研究以美国学者居多;② 几位中国学者从流量时间序列入手,分析其混沌特征,尝试从用理论上探索交通流量可预测性问题。这一类研究虽然成果不多,但却为机头对时距模型、跟驰模型等微观交通模型,提供了宏观印证。
地面交通研究中,用车头间距、车头时距描述交通流中前后相邻两车距离或者通过某一点的时间差。两者是同一概念的不同量度单位,均与宏观交通流三要素(流量、密度、速度)密切相关[104]。地面交通复杂性研究发现,虽然交通流基本图模型可以展现交通参数间非线性关系,但更适合定性描述,车头时距则是是更好的定量度量工具[105]。这一经验很快被中国学者引入空中交通系统复杂性研究。
与地面一维交通流不同,即使在同一航路、沿同一航向飞行航班也可能分布在不同高度层。如何判定航班尾随关系(也称跟驰关系、跟随关系)就成为首先需要回答的问题。其次,同一跑道落地航班,即使沿不同航路进场、进近,相互之间同样存在尾随关系。第三,因间隔调配等原因,航班可能在管制员指挥下偏出航路,由此导致交通流中各航班路径长度不同,车头时距和间距方法是否能用,是否等价仍待检验。
2018年,王超和朱明[106]采用与地面交通最相似的方案,仅将同一段航路上、沿同一方向、同一高度层航班看作同一交通流,统计了机头时距分布规律,并尝试用对数正态分布和二元混合分布拟合。2020年,Wang等[107]根据历史轨迹统计得到的、进场航路上各点到达最后进近定位点最短时间,定义最短剩余时间(Shortest residual time)概念,据此标定进场交通流中各航班次序和机头时距。基于该方案,建立了机头时距与交通流拥挤状态(拥挤态、稳定态、自由态)之间关系。该研究不仅表明空中、地面交通流的相似性,其提出的最短剩余时间概念与ICAO Doc 9883[71]中空中交通管理系统效率定义完全一致,更进一步揭示了交通流效率与拥挤的关系。
跟驰模型是微观地面交通流理论核心内容之一,其中最经典的刺激—反应模型是根据本车和前车距离、速度等关系决定本车反应[108]。从理论上说,出于同样的防撞需求,管制员指挥的空中交通流也应该遵循这一规律,但诱发后机跟驰行为的刺激项,控制跟驰过程的敏感系数,以及跟驰过程中盘旋等待、变更高度层、偏出航路等航班特有机动动作,则需要进一步研究。
2015年,张洪海等[109]将管制间隔标准与实际间隔之间偏差,作为刺激项和敏感系数,即前后机距离大于或者小于间隔标准时,都会诱发跟驰行为。跟驰过程中,调整高度、速度优先,距离不足时,采用大角度偏出航路机动增加间隔。同年,张洪海等[110]采用模糊逻辑方法提出了航空器动态期望间隔控制策略。上述研究分别针对单股、单次汇聚、多次汇聚交通流建立了跟驰行为仿真模型,基于仿真结果展示了交通流速度、密度和流量等基本参数之间的相互关系。虽然同为交通问题,但因机机间隔、控制逻辑与地面交通差别很大,空中交通是否存在地面交通流行为,一直没有定论。以上研究依靠仿真手段,从逻辑上证实了空地交通流存在相似的拥挤态势。
2016年,Yang等[111]在上述仿真研究基础上,采用交通流基本图模型,基于实际数据分析了广州机场终端内两条汇聚航线,发现交通流有4个独立的交通相,即自由流(Free)、畅通流(Smooth)、半稳定流(Semi-stable)和拥挤流(Congested)。2017年,分析广州白云机场停机坪和滑行道交通流时,也发现存在自由流和拥挤流2个相[112]。2020年,Ma等[113]独辟蹊径,基于微观碰撞风险模型,借助图像识别方法,同样发现空中交通流存在正常态(Normal State)、过渡态(Transition State)、拥堵态(Overload State)等3类交通流态势。上述研究基于实际数据分析,再次表明空中交通流虽然密度、流量远小于地面交通,但确实存在类似的交通流特性,可以采用相同或者类似的方法,研究和控制空中交通复杂性。
连接全球各机场的空中航路,构成了覆盖全球的空中交通网络。1968年、2020年纽约机场拥挤、冰岛空域关闭,引发的全国性乃至全球性航班延误,都说明空中交通网络上各机场、各管制区间存在的密切联系,需要从更为宏观的层面,把握其整体行为。
20世纪末,以小世界网络和无标度网络为代表的复杂网络研究取得突破性进展,为从宏观层面认识空中交通问题提供了全新手段。与航班群关注航班对冲突风险,航班流研究流量、密度、速度3要素关系及演变不同,网络分析关注由航班流串联起来的,机场、航路点、管制区网络呈现的整体特征。网络结构复杂性、时空分布复杂性及其流量演化机制问题,是研究的关键所在,也是研究的关键性基础科学理论问题[114]。
与网络模型关注宏观网络特征不同,还有1类模型虽然同样立足机场网络,但其研究关注航班延误微观传递过程,目的是构建机场间航班延误传播模型。从数学方法上看,两类模型差别较大,但因两者研究问题相近,且均与机场网络拓扑结构密切相关,因此本文也将其归入空中交通网络研究。
代表性的空中交通网络研究模型如表4[115-119]所示。
机场、航线网络是航空运输系统最基本的组成部分,航空公司运营、空域机场规划、空中交通管理等均与之密切相关。空中交通网络尤其是其中的航空运输网络始终是研究热点。但从构建交通运输工程理论体系角度,空中航行网络结构与容量、效率之间的关系更值得关注。
与机场、管制扇区容量广受关注不同,空中航行网络研究更多集中在连通性、鲁棒性、韧性等典型网络特性研究,但与整个网络所能容纳的活动航班数量并不直接相关。为满足交通管理实践需要中,欧盟法规中将流量管理造成的平均航班流量管理延误,即航班实际推出时间与计划推出时间偏差(Air Traffic Flow Management Delay)作为衡量网络容量指标[120]。该方法忽略延误产生机理,将空中交通管理系统作为黑箱处理,与基于工作负荷的管制扇区容量评估方法类似,仅能用于工程化的事后分析。针对这一不足,2015年,Pien等[116]在欧洲空中航行网络鲁棒性研究时,提出用网络最大流(Maximum network flows)表征网络容量的新思路,同时定义相关区域指数(Relative Area Index,RAI),用以标识网络中某个节点(机场、航路点、管制扇区)容量下降对网络容量的影响。
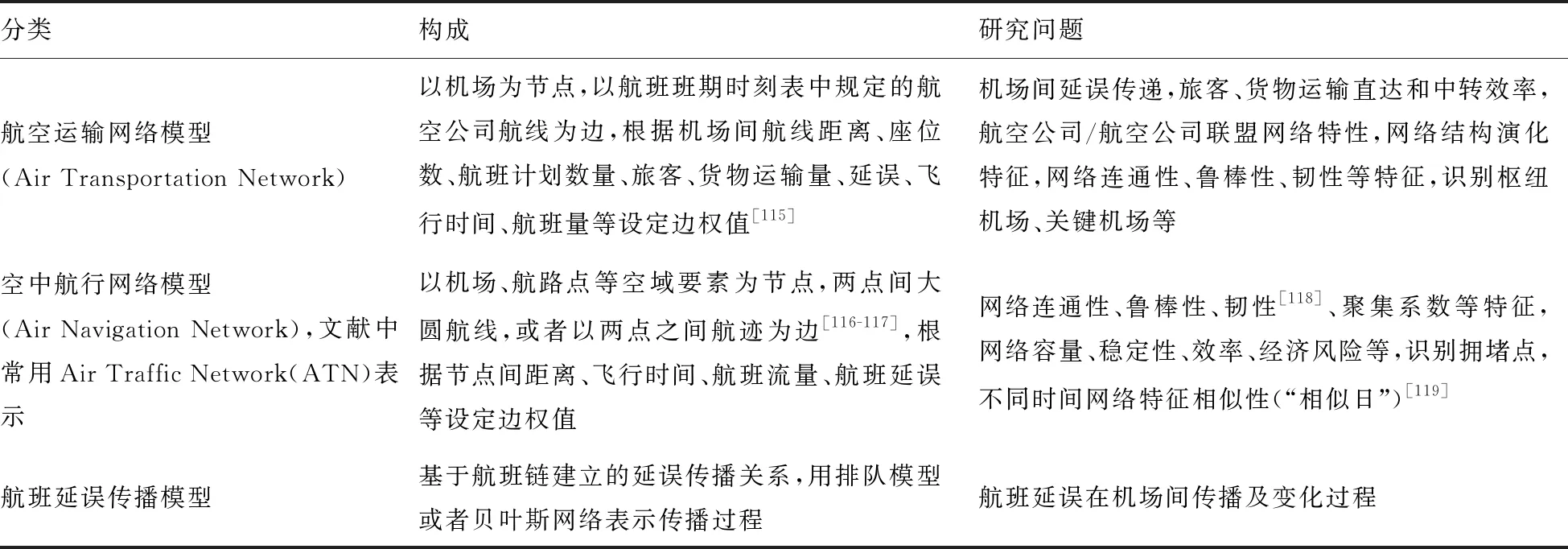
表4 空中交通网络研究模型
现有文献中,空中航行网络效率被定义为航班在网络中飞行的燃油效率、航空乘客旅行距离[121];或者从网络鲁棒性角度,机场随机关闭或者发生蓄意攻击时网络保持性能的能力[122]。从以上定义出发,相关研究都表明网络拓扑结构与效率密切相关,网络结构被破坏时,网络效率会随之下降。与前文中效率定义相比,现有空中航行网络效率研究,虽关注了航班燃油效率,但更为重要的网络中航班计划执行能力研究却并不充分。在组成航班计划的起降时间和飞行航迹之中,起降时间执行偏离在航班延误研究中已经涉及。
在ICAO定义的效能体系中,延误是效率指标的组成部分,因其广受各方关注,航空运输网络、空中航行网络中,航班延误传播问题,始终是研究热点。现有研究路线基本形成航班链和机场网络两条技术路线。实际运行中,交通拥堵、恶劣天气、空域限制、旅客晚到等因素都会诱发航班延误。在由同一航空器执飞多个航段形成的航班链中,前序航班延误无疑会影响后续航班的正常性。显然,航班链是延误传播最主要的原因,也是研究延误演化的重要线索。早期研究从统计数据中着手,寻找航班链中延误出现时间、发生致因和后续变化过程[123]。Xu等[124]在统计基础上,引入贝叶斯网络,量化了航班链上各航段延误发生的条件概率。Odoni等[125]从机场角度,引入排队模型表示机场服务过程,用航班链将各个机场排队模型串联成网络,成功揭示了网络中延误演化过程。另一类研究基于表4中提到的航空运输网络,基于航班链建立机场间延误传播关系,用机器学习方法直接预测机场平均延误[126],或者用网络特性指标展示延误传播带来的影响[127]。由于社会影响大,航班延误传播始终是研究热点。当前研究在揭示延误传播机理、机场受波及情况的同时,延误损失度量、航班延误预报,尤其是大数据驱动的预报技术研究同样广受关注[128],相关成果已经在空中交通流量管理、航空公司运行管理、旅客出行诱导中广泛应用。
4.3.2 空中交通管理组织与协同模式
与其他领域的管理活动类似,空中交通管理活动本质上也可以看作以管制员为主体的管理者对航班这一被管理者的管理。经过百年由点到线、由线到网络的发展,空中交通管理组织已经从单一机场塔台、单一航路管制中心发展为覆盖全国空中航行网络的复杂系统。典型的空中交通管理组织及其与机场、航空公司运行部门的协作关系如图14所示。

图14 空中交通管理组织
需要说明的是,按照4.1节定义的研究框架,图14中忽略了组织中航空情报、空域规划等非对空指挥部门,简化了中央流量管理单位和管制扇区之间的管理层级。此外,按照主要功能,将美国ATCSCC、欧洲网络运行管理中心(Network Manager Operations Centre,NMOC),中国空管局运行管理中心统称为中央流量管理单位。按照ICAO Doc9854[35]定义,完整的空中交通管理功能如图5所示。同样基于4.1节定义的研究框架,冲突管理(Conflict management,CM)、交通同步(Transportation synchronization,TS)和需求与容量平衡(Demand-capacity balancing,DCB)是关注重点。
在整体组织架构和功能的基础上,针对被管理对象和特定的管理任务,组织管理过程和方式会呈现某种稳定的原则、规则和方法,即管理组织模式。该模式是管理组织中主体构成的、管理事权配置、运作流程、组织结构、决策支持综合形成的组织整体行为与功能原理等[78]。按照4.2.2节提出的管理协同原理,分布式管制扇区分时段管理连续四维航迹的工作方式,必然导致协同成为最主要管理组织模式。因此,认识协同模式特征与机理,就成为空中交通工程学基本理论问题之一。协同模式是空中交通管理决策的前提。Clark[129]、Brinton[130]和Okuniek[131]等专家,正是基于塔台管制员、机坪管制员协同模式,改进了离场交通管控结构,开发了更优的决策算法和离场辅助决策工具。
协同模式在空中交通管理决策问题中应用如图15所示。空中交通管理组协同模式如表5[132-136]所示。
图15 空中交通管理组织协同模式应用
分布式管理特征决定了空中交通管理组织中协同模式的普遍性。与实践中灵活多样的协同方式相比,现有研究更多关注固定组织结构上微观协同行为。2019年,王兴隆等[137]在空中航行网络上叠加管制扇区网络,构建机场、航路与管制扇区三层相依网络模型,发掘交通流行为与管理架构关系的研究,就是这一思路代表。与之相比,由于缺乏机理上的认识,现有变结构、跨组织协同仅能依据固定规则程序完成,很难应对复杂的现实环境[138]。
TBO概念出现后,全生命周期、全航迹、全体成员、全部功能的协同需求,必将带来更为复杂的管理组织模式。面对复杂交通态势,组织内外管理者、被管理者,通过动耦合、自适应、自组织等方式,形成边界灵活、时效性更强的组织结构,推出有针对性的全新管理功能,将成为空中交通管理组织运作的常态。
4.3.3 空中交通管理系统安全风险演化与防范机理
空中交通管理主要的任务就是控制安全风险。如图11所示,安全风险与空中交通系统复杂性和交互网络代表的空中交通管理组织直接相关。图3、图4所示系统功能架构中,则将安全责任落实到扇区交通管制、飞行员感知、航空器飞行等环节。这些内容明确了安全风险产生机理与防范方式,是空中交通管理系统安全风险研究的出发点。
1) 空中交通管理系统安全风险
安全无疑是航空运输系统最关注的问题。美国、欧洲都设有专门的航空安全管理机构。中国在中国民用航空局内,设有航空安全办公室。针对空中交通管理系统安全,我国在民航局空管行业管理办公室内,民航局空中交通管理局内,均设有专门的安全管理部门。从机构设置中可以看出,空中交通管理系统安全既是整个航空运输系统安全的组成部分,也有其独特性。

表5 空中交通管理组织协同模式
Brooker[139]将航空运输安全风险分为3类:① 安保风险,因劫机、恐怖袭击等带来的风险;② 飞行风险,完全由机载设备故障、灾难性环境影响、飞行员自身原因导致的风险,且管制员无法缓解;③ 空中交通管理系统风险,由空中交通管理系统原因造成的风险。

图16 空中交通管理系统安全风险致因
围绕空中交通管理系统防撞目标,在分析航班危险接近事件、相撞事故数据基础上,Brooker[140]将空中交通管理系统安全风险致因归纳为3类,如图16所示。空中交通管理体制、管理规则与程序、空域结构,机载防撞系统和地面冲突告警系统,管制员和飞行员对交通态势的监视及发生危险时的及时干预,共同构成安全防护体制,每个环节中出现的漏洞,则可能成为事故致因。20世纪中期以来,多起飞行事故均表明,人-机-域耦合是其中最主要的风险致因[141]。
人-机-域耦合风险致因研究涉及因素广、研究难度大。ICAO Doc 9859推荐了REASON模型、SHEL(S-Software-软件、H-Hardware-硬件、E-Environment-环境、L-Livewire-生命件)模型,作为基本分析框架。更为细致的研究主要采用失效树(Fault Tree)、事件树(Event Tree)等因果分析模型,或者借助系统建模方法,从分析不安全事件中寻找联系[142]。如3.4节所述,大数据分析方法兴起后,挖掘不安全事件与交通特性参数之间因果关系逐渐成为研究热点。
2) 空中碰撞风险
在以防撞为核心任务的空中交通管理系统中,航班空中相撞无疑是最严重的交通事故,是安全风险控制最主要的着眼点。
按照图16所示分析框架,空中碰撞风险(Collision Risk,CR)用公式表示为[139]
CR=(∑(Rc×Pf×Tc×Ks)
(1)
式中:Rc表示冲突航迹(如偏离航迹)出现的频率,在管制员指挥下,Rc表示未被管制员发现冲突航迹出现频率;Pf表示飞行员和管制员,在ACAS、地面短期冲突告警(Short Term Conflict Alert,STCA)设备支持下,未采取有效防撞措施概率;Tc表示关注空域内(如管制扇区、平行进近航线上等)冲突航迹数量;Ks是用航空器外形尺寸、保护区大小,以及相对速度表示的冲突严重程度;∑表示对全部可能的冲突类型求和。
经典的Reich模型没有考虑防撞/冲突告警系统及管制员调配带来的碰撞缓解,是式(1)的简化形式。式(1)中Rc代表的冲突是碰撞的前提,当航班位置完好性(Position Integrity),活动意图合理性(Reasonable Intent)丧失时,就会出现冲突航迹[140]。
当定位设备“正常”运行时,当雷达、GPS、高度表、测量误差不严重时,当显示器工作正常时,当信号未损坏或丢失时,系统具有此功能。位置完好性是是对航空器水平和垂直位置保持能力、雷达等监视设备数据处理与显示精度的度量。在忽略管制员干预的洋区航路侧向间隔、高度层垂直间隔评估及缩减研究中,位置完好性是最主要的碰撞风险致因[140-141]。
管制员是否做了称职管制员认为合理(尽管可能不完美)的行为。飞行员是否做了其他飞行员认为是正当的做法(尽管可能不是理想的决定)。意图合理性通常是指理解错误和判断失误,属于人为因素问题。前文中提到的认知复杂性,以及围绕管制员、管制员团队、管制组织开展人因差错(Human Error)、人因可靠性(Human Reliability)研究,都是对这一复杂问题的探索[142]。
据Brooker[140]估计,位置完好性占碰撞风险的10%,意图合理性占85%,其余5%来自系统复杂性。这一估计表明人因是风险管控重点。
在ACAS等机载防撞设备成熟之前,位置完好性和意图合理性带来的冲突,以及冲突严重程度Ks和冲突密度Tc是最直接的碰撞风险致因。欧美深入研究后,提出危险分析、概率分析、仿真分析、人因分析等四类碰撞风险分析方法[143-144]。
从20世纪末开始,伴随下一代航空运输系统概念的提出和发展,在安全领域也出现了ACAS、STCA等告警设备,和机载自主间隔保持(Airborne Separation Assurance Systems)和战术间隔保持环境(Tactical Separation Assured Flight Environment)等新的防撞概念。由于涉及空地系统、管制员与飞行员之间复杂交互,相关研究并不充分。早期主要通过分析告警统计数据、构建失效树等黑箱方法评估碰撞风险[145-146]。2013年,Netjasov等[147]用着色Petri模型,量化了ACAS与碰撞风险之间关系,在认识Pf机理上取得突破。
3) 间隔标准
如4.1.2节所述,ICAO、FAA、CAAC等民航管理机构将保障安全所需的最小间隔作为标准,要求管制员、飞行员必须遵守,因此最小间隔俗称为间隔标准。
间隔标准是空管规章的核心。中国和ICAO类似,从水平与垂直、IFR与VFR、管制方式(塔台管制、程序管制与雷达管制)、航空器尾流强度等几个方面设定间隔标准[3,64]。FAA间隔标准尤其是雷达间隔标准更为复杂,需要根据建设雷达种类和数量、监视目标到雷达天线距离和方位、航班所处飞行阶段等诸多条件确定[148]。这一现象说明,除碰撞风险外和TLS外,空域航行性能、空中交通网络特性、航班流特性等诸多因素都会影响间隔标准[149],如图17所示。Netjasov[150]总结的空域系统规划与评估方法如表6所示。

图17 确定间隔标准方法
4.3.4 科学问题汇总
科学问题不是具体的实际问题,而是理论思维领域中,面对已知理论无法解释的异常现象和客观事实时,从完善突破现有理论角度提出的研究问题。基于这一认识,本文在4.3.1~4.3.3节中,以航班、航班群。航班流、空中交通网络不同颗粒度,分别从空中交通特征、交通管理组织,以及最受关注的安全风险角度,梳理了空中交通工程学中,研究对象认知过程中形成的科学问题,如图18所示。
上述科学问题展现出空中交通管理系统复杂性、随机性和不确定性的本质属性,以及空中交通工程学工程与管理跨学科融合特征。这一认识上的进展,将为学科进一步发展完善奠定基础。

表6 空域系统规划与评估方法
4.4 关键技术
与科学问题探索不同,关键技术攻关直接服务于交通管理实践,需求更为强烈、发展速度更快。近百年发展过程中,跑道容量评估、空域扇区容量评估、到场交通流控制、冲突探测与解脱,先后成为代表性的运行管理技术。20世纪80年代起步的空中交通管理体系研究,则形成了对支撑技术体系的认识。
从1983年CNS/ATM功能划分,2005年 面向未来容量需求的新一代空中交通管理功能架构(图4)和ICAO Doc 9854(图5)中,空中交通运行支撑技术可以分为“软”“硬”两类。前者侧重信息获取与处理,包括航空通信、航空导航、航空监视、航行信息管理、机载飞行管理。后者侧重人、机、域交通行为协同调控,包括空域组织与管理、机场运行管理、流量管理、交通同步、冲突管理等子领域,以及与之相关的航空公司运行管理。按照空中交通工程学定义,本节将重点关注后者子领域中的关键技术。
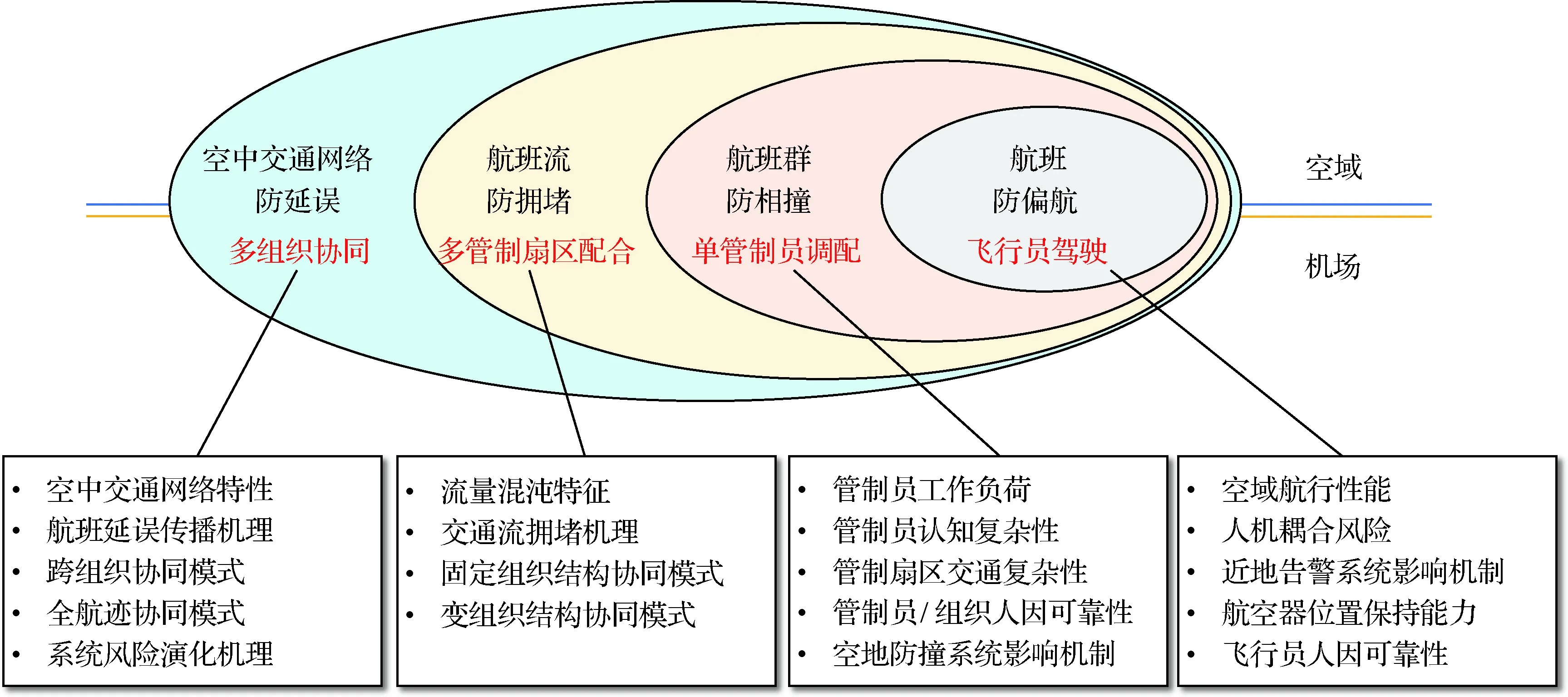
图18 空中交通管理系统管控重点与科学问题
4.4.1 空域扇区容量分析与设计优化
作为最重要的飞行资源,空域组织与管理经历了以下几个阶段:根据飞行需求划设机场空域,建立连接各个机场的空中航路,在交通密集的机场终端区划设进离场航线,从飞行安全角度建立航路和机场导航、通信、监视、气象服务设施,为每个管制席位划设管制扇区。这其中,管制扇区是实现如图1所示控制逻辑的前提和基础,无疑最为关键。如前文所述,虽然航空器群行为及交通复杂性研究仍待深入,但实践中已经形成了基于管制工作负荷的扇区容量评估方法。在此基础上,将空域分割为管制工作负荷均衡的多个扇区就成为后续研究重点。
空域分割方法分为2类:一是直接将空域离散为大小相等的多边形(可以是矩形、三角形、六边形);然后计算每个多边形中的流量、交通复杂性和工作负荷;最后以工作负荷平均分布为目标,用聚类、整数规划等方法寻找多边形组合方案,确定扇区边界[151]。二是采用泰森多边形(Voronoi diagrams)将2D空间分割成多个不重叠的凸多边形,通过优化泰森多边形分割节点,或者不断迭代划分,找到平衡工作负荷的划分方案[152]。按照同一航空器进出同一扇区不能超过1次的运行要求,扇区形状必须是凸多边形。泰森多边形法完美的解决了这一问题,因而得到广泛应用。
21世纪以来,随着星基导航、通信技术广泛用于航空,飞行具备了更大的灵活性。2007年,NASA Ames研究中心的Kopardekar等[153]提出了新的空域设计理念——动态空域构型(Dynamic Airspace Configuration),其内涵是通过引入新型空域结构(如管道型、走廊型、高速路型、平行航路等)、自适应空域(Adaptable Airspace,根据流量与容量匹配情况,动态变动扇区边界)、通用空域(Generic Airspace,任何管制员、任何设备条件下都可以指挥的空域),实现从交通流适应空域结构(Flow Follows Structure),向空域结构适应交通流(Structure Follows Flow)的关键转变。这一领域目前仍然是研究热点。实践中,SESAR也提出并实施了灵活航路空域(Free Route Airspace,FRA)项目,在欧洲多地划设FRA,支持航空器自主选择飞行路线[154]。面向2030年可持续发展目标,欧洲还将推出动态航路、动态划分管制扇区等更为灵活空域管理方式[155]。
4.4.2 机场容量评估与场面拥挤管理
早在20世纪40年代,机场容量就成为运行中最关心的问题。到70年代末,基本形成了了解析计算、快速仿真和实时仿真等机场容量评估方法。2000年前后,多名NEXTOR经过实地观察,完整定义机场运行管理框架的同时,发现航空器起飞跑道外排队等待是最常见的机场拥挤现象[156]。机场场面拥挤管理由此开始关注跑道构型管理(Runway Configuration Management,RCM)和以滑出过程为重点的离场控制。
跑道构型可以定义为[157]:机场内供航空器起降活动跑道数量、位置和朝向,以及在IFR或者VFR规则下,活动跑道起降方向及运行方式(包括未使用、全起飞、全降落,起降混合等)。对于拥有多条跑道的大型枢纽机场,跑道构型是风向风速、进离场流量、飞行程序、机场噪音和排放限制、滑行道布局、停机位等诸多因素共同作用的结果,选择过程还需要考虑管制工作程序、管制员习惯等主观因素以及足够的提前量,目前主要采用混合整数规划建模求解[158]。
2007年MIT的Balakrishnan与NASA专家合作,观察美国Dallas-Fort Worth(DFW)机场滑行管理流程时发现,控制离场航空推出时间、到场航空器滑行路线,可显著减少场面拥挤[159]。基于这一发现,后续研究随之分为两类:一是将机场活动区停机位、机坪、滑行道、跑道,用节点和边(Node-Link)组成的网络图表示,将航班滑出问题转化为该网络上的路由问题,以总滑行延误最小、总滑行排放最小等为目标,用整数规划方法求解[160]。该方法需要对滑出航班进行连续控制,管制员工作负荷大增;二是Khadilkar等[161]提出的,按照一定时长,控制航空器从各个停机位推出速率。该方法控制效果稍差,但使用简单,很快在美国多个机场推广。
4.4.3 网络交通流分析与管理
流体力学里,采用欧拉方法描述任一时刻流场中各种参数分布,采用拉格朗日方法描述每个粒子从某一时刻起的运动轨迹。这两类方法也成为空中交通流分析与控制的出发点[66]。
2002—2004年间,美国学者Menon等[162]引入交通量Q,开始用欧拉方法描述交通流整体行为。法国学者Bayen等[163]完全借鉴地面交通流理论,定义了交通量Q、航路上平均速度v和平均飞机流密度K等交通流状态参数,推导了空中航行网络交通流欧拉模型。另一类交通流模型称作集合模型(Aggregate Model),非常类似机器学习方法,用矩阵表示空域系统中各个管制中心、各个时刻的交通量,通过矩阵变换预测管制中心流量[164]。上述研究,从不同角度定义了空中交通流参数,建立了基于欧拉方法的研究框架。与拉格朗日方法相比,这些方法关注交通流预测和控制,适用于宏观问题研究。2008年,Sun和Bayen[165]充分发挥两类方法优势,将扇区看做二维流片,用欧拉方程预测流量,用拉格朗日方法(整数规划)优化流量,实现了新的突破。
20世纪70年代,空中交通拥挤激增的背景下,美国成立里国家流量管理机构,实施了单、多机场GDP等全国性流量控制程序,以及控制航班距离和过点时间等区域性流量控制措施。2006年,FAA推出空域流量程序(Airspace Flow Program,AFP),采用类似GDP的原理控制航空器起飞时间,减少空域拥挤[166]。与GDP、AFP类似,欧洲根据空域和机场容量,采用计算机辅助时隙分配(Computer Assisted Slot Allocation,CASA)方法,控制航空器起飞时间[167]。美国GDP、欧洲CASA本质上都是一套航班离场时隙分配规则,虽然确保了时隙分配的公正、透明,却很难兼顾效率,尤其是整体效率。
1989年,Odoni等[25]在其经典的GDP模型中,率先引入拉格朗日方法描述到场交通流,同时提出通过控制单机,减少航班总延误的管控策略。2011年,Odoni等[168]提出一种新的整数规划模型,涵盖起飞、巡航和着陆等飞行阶段,全面整合地面等待、改航、调速和空中等待等控制策略,实现了机场、空域交通流的整体优化。2019年,欧洲空管研究中心(Eurocontrol Experimental Centre,EEC)提出增强型时隙分配方法(Enhanced CASA,ECASA),也尝试通过微调部分航班时隙,减少整体延误[169]。GDP、CASA等流量管理程序的深入研究和成功应用,代表了拉格朗日方法被广泛接受,成为交通流控制方法的主流。这一方法最大问题是,相应的优化过程需要精确测算空域机场容量值,单机控制实施难度和工作量较大。
随着ICAO Doc9750[170]航空系统组块升级计划(Aviation System Block Upgrades,ASBU)的推出和实施,TBO运行和管控模式,效率、可预测性、公平性等新评价指标,都会成为网络交通流管理新关注点。
4.4.4 进场交通组织与管理
从终端区走廊口下降到降落跑道起始进近定位点的进场过程中,航空器不仅需要连续下降高度,还需要持续调整前后机间距,确保安全汇入降落交通流。与此同时,不断下降的进场航空器还要避免与不断爬升的离场航空器发生冲突。交通态势复杂、管制指挥困难、安全隐患众多,决定了进场交通组织与管理始终是空中交通管理的难点和重点。
20世纪90年代中期,NASA主持开发了终端区自动化进场管理系统(Center-TRACON Automation System,CTAS),并在美国达拉斯沃思堡国际机场验证测试[171]。CTAS面向整个进场流程,集成了进场航线解析、进场航迹运动学建模、基于经验的跑道分配和进场排序、航迹冲突探测与解脱等关键技术,为管制员自动生成降落跑道、降落次序、航路下降时间、最后进近次序和间距等指挥建议,是迄今为止功能最完整的进场管理系统。遗憾的是,CTAS最终没有获得FAA使用许可。
除自动化系统外,国内外各大机场都使用排序航线规范进场交通秩序[172]。2006年,Hoffman等[173]推出一种新型排序航线——点融合航线(Point Merge),在建立进场秩序同时,占用空间大大减少。2017年, Liang等[174]基于TBO概念,针对平行跑道机场进场管理问题,提出将点融合排序航线、进场排序算法、航迹优化算法相互融合,生成航空器完整进场航迹的全新设想。这一综合性解决方案,代表了进场交通组织与管理技术的最新动向。
4.4.5 建立间隔与冲突管理
建立间隔的方式,与航班空中位置测量方式直接相关。早期机场区域内飞行时,由于缺乏有效的测量手段,间隔只能由飞行员、管制员目视判断。这类间隔方法也因此称为目视间隔。1928年,Kollsman发明世界首个高精度机载气压高度表,高度表可以单独显示本机到设定基准气压面的垂直距离。借助这一功能,以标准大气压为基准气压面,空中交通管理部门将空域按照气压表高度分层(如300、600、900 m…),规定每架航空器都只能按分层飞,除上升下降外,不能呆在两层中间,垂直间隔也由此设定。
机场间航路飞行开始后,沿航路布置的信标台成为航空器定位的重要参考。管制部门借鉴轨道交通区间闭锁原理,控制两个航路信标台之间只有一架航空器,借此配备了纵向水平间隔。随着信标台逐渐被无线电导航设施取代,这种地面定位台站加飞行员位置报告程序的方法,最终发展为程序管制间隔方法。
20世纪50年代雷达管制出现后,除了沿用基于高度层的垂直间隔保持方法,水平间隔则完全改为管制员指挥飞行员动态调整。与程序管制依靠地面信标台标定水平纵向间隔不同,实践中航空器水平距离完全由管制员从雷达屏幕上测量,安全间隔则根据雷达精度、显示目标大小、管制员和飞行员反应时间等因素确定,称为雷达间隔方法[175]。雷达管制间隔远远小于程序管制间隔,对管制员反应时间、调配能力、执行能力提出更高要求的同时,也极大增加了工作负荷。1986 年美国Cerritos上空撞机事件,暴露出雷达间隔在大流量中的安全隐患,由此推动ACAS诞生和发展。借助机载防撞系统告警和动作提示,成为一类新的间隔保持方法。
基于气压高度表的垂直间隔、基于雷达的水平间隔和基于机载防撞系统的新一类间隔,构成了防止航班撞地、相撞的主要间隔方法。当按照某一间隔方法,两航班之间、航班与地面障碍物之间距离小于对应的间隔标准时,或者两机到达最接近点(Closest Point of Approach,CPA)时间小于设定值时,就认为航班之间存在冲突。冲突探测与解脱(Conflict Detection and Resolution,CD&R)就是探测航班在未来一段时间发生冲突可能性,以及据此提出规避冲突飞行机动的过程。Kuchar和Yang[176]将CD&R过程,分解为航迹预测、冲突告警、冲突解脱等环节,并从地面、机载设备等角度研究探索建立有效的防撞机制。2016年发布的ICAO Doc 9750[170]全球空中航行计划中,提出综合管制自动化系统与机载系统CD&R功能,构筑空中安全风险防范安全网(Safety Nets)的思想。如图19所示。
图19明确了现有空中交通管理架构中,CD&R技术作用环节,同时展现出空地、地地、空空融合是该技术的发展方向。
鉴于空地融合的发展趋势,将统一的地基、机载冲突探测与解脱方法归纳如图20所示。
依据实时位置探测和航迹预测结果,CD&R方法分为确定型、概率型两大类。前者基于相对准确的航迹预测和间隔标准判断冲突。后者基于位置分布概率和失去间隔概率、虚警率等优化目标,预测未来某段时间冲突概率。与之对应的冲突解脱建议中,也包括确定型、概率型两类避撞航迹,供管制员、飞行员选择[176]。如图20所示,在防撞系统开发中,需要从真实冲突数据中提炼冲突特征,建立航空遭遇模型(Aircraft Encounter Model),用于验证避撞航迹优化算法鲁棒性[177]。
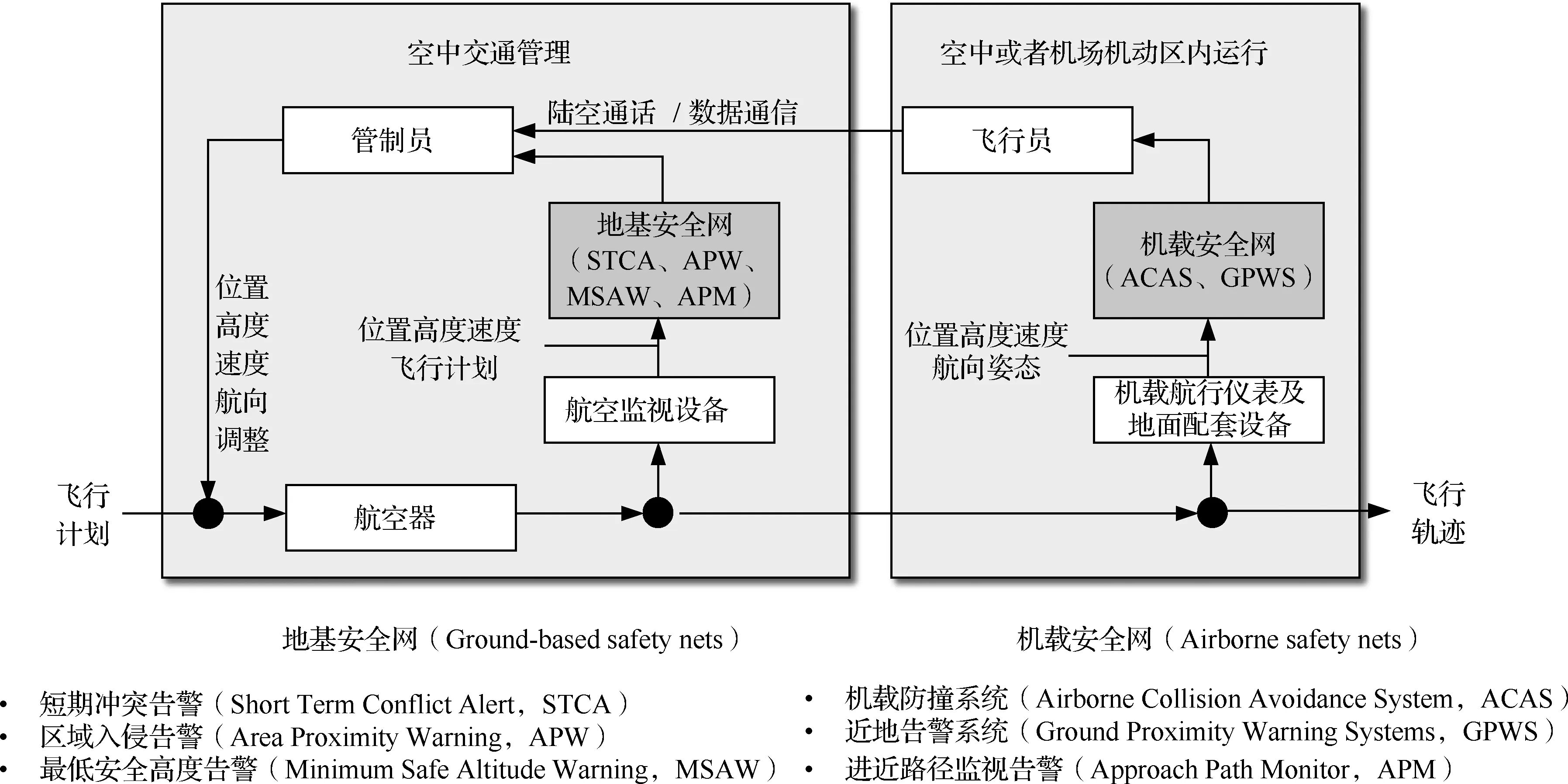
图19 增加安全网空中交通管理系统

图20 地基、机载冲突探测与解脱方法
2005年,ICAO定义全球空中交通管理运行概念中,将应对撞机坠地问题的各种措施统一定义为冲突管理,分为战略冲突管理、间隔保持和避撞等3个层次[35]。CD&R问题对应间隔保持、避撞两个层次。
另一类偏学术划分方法,根据冲突预测时间提前量分为战略(30 min以上,也称长期),战术(10~30 min,也称中期),运行(10 min以内,也称短期)等3个阶段[178]。与上述划分方法略有不同,Eurocontrol按照2、20 min区分短期、中期和长期冲突告警。
作为空管领域最核心的问题,冲突管理技术研究内容非常丰富,目前已经逐步形成了以碰撞风险模型为基础的间隔保持技术、以飞行力学和优化控制方法为支撑的空地CD&R技术。近年来,随着无人机等新型航空器进入空域,该技术重要性将愈加凸显。
4.4.6 关键技术架构
与科学问题来源的抽象思维不同,关键技术主要来源于实践。戴世强等[179]在研究地面交通流时,曾经提出以下研究方法:观测实验→建立数学模型→提出新的或者利用、发展旧的数学方法→求解实际问题获得解答→与观测实验结果进行对照、比较、检验。ICAO出台《全球空中航行系统效绩手册》(ICAO Doc 9883)[71]、《空中交通管理系统要求手册》(ICAO Doc 9882)[75]2部手册,也推荐了类似的空中交通系统分析和研究方法。
借鉴这一方法,在运行观察、参数测量与统计基础上,将以上5大类关键技术及其中各项内容,归纳为如图21所示的空中交通管理关键技术架构。

图21 空中交通管理关键技术架构
5 结 论
伴随航空运输发展起来的空中交通工程,由于其独特的三维运行方式、地面管控模式,已经开始出现既有别于航空科学与技术学科飞行力学与飞行控制问题,也不同于公路、铁路、船舶、管道运输交通管理方式的交叉学科特征。
空中交通工程学是研究人-机-域之间相互作用关系的科学。围绕安全、高效、低碳3大管控目标,已经形成了空中交通管理系统复杂性建模、空中交通管理组织与协同模式、空中交通管理系统安全风险演化与防范机理等3类有待深入认识的科学问题,和空域扇区分析与设计优化、机场容量评估与场面拥挤管理、网络交通流分析与管理、进场交通组织与管理、建立间隔与冲突管理等5类仍在研究中的关键技术问题。在世界各国专家、学者共同努力下,上述科学、技术问题研究不仅取得初具规模,而且在解决安全风险管控、交通拥挤疏导等重大现实问题中发挥了不可替代的作用。进入21世纪以来,随着TBO这一全新运行方式的推出,这一作用将更加明显。
作为一门年轻的交叉学科,空中交通工程学还有很多问题有待深入:该领域问题研究和知识创造方法论是什么?航空器单机、群、流行为模型是否存在统一的基础理论?能否在天气等随机扰动作用下,建立全空域、全流程航空器精确控制方法?融入无人机运输、亚轨道飞行、太空交通管理之后,更加灵活、先进的运行与管控方式是什么……大量新问题持续涌现,既体现了空中交通工程学科旺盛的生命力,更为学科创新发展指明了方向。
猜你喜欢
西安航空学院学报(2022年5期)2023-01-04
南北桥(2022年2期)2022-05-31
中国民航大学学报(2019年1期)2019-04-13
航空学报(2018年12期)2019-01-18
新商务周刊(2018年15期)2018-12-06
环球飞行(2018年7期)2018-06-27
电脑知识与技术·经验技巧(2017年9期)2018-02-24
创新作文(1-2年级)(2017年4期)2017-09-22
科学与财富(2016年27期)2017-03-24
航空知识(2017年2期)2017-03-17
