
基于车路协同的行人过街主动安全预警系统
2023-01-07 03:24李海洋曲大义刘浩敏王少杰张可琨
济南大学学报(自然科学版) 2023年1期
李海洋,曲大义,刘浩敏,王少杰,张可琨
(青岛理工大学 机械与汽车工程学院,山东 青岛 266520)
城市道路交叉口是车流与人流的交汇点,是交通事故的多发区域。据统计,60%以上的交通事故发生在城市道路交叉口,而其中90%发生在信号过渡期间[1]。研究[2]发现,如果行人在绿灯变化前最后5 s内开始过街,则在红灯启亮前几乎无人能完成过街。如果行人在信号过渡期间过街,通常会出现行人未完全通过,而车辆已获通行权并开始启动,行人过街与车辆产生冲突,进而造成交通事故。在交通参与者中,行人是数量最多、范围最广的,也是交通系统中的弱势群体[3]。交通事故中行人的伤亡人数约占交通事故伤亡总人数的20%,而行人过街过程中的伤亡人数则超过了其中的50%[4]。由此可见,信号过渡期间行人过街安全问题亟待解决。
针对行人过街过程中的人车冲突问题,国内外学者设计了多种安全系统,以减少交通事故的发生。Jin等[5]设计了一种包含发光标志、发光二极管(LED)人行横道灯、文字显示、语音装置的人行横道安全系统;当出现超速车辆接近过街行人时,系统向车辆和行人双方传递视觉和听觉警示信息。Sowmiya等[6]为了减少行人在斑马线处发生交通事故和死亡的情况,设计一种包括车厢模块、传感器模块、交通灯模块、电源模块的智能车厢,有效保证了行人和车辆的安全。陆毅忱等[7]对行人和车辆运动状况进行检测,根据检测情况进行信号控制,并增设物理隔离和语音提示装置,改善行人过街安全性。陈泽等[8]针对行人反应快于车辆制动的特性,建立了一种根据车速和信号控制方案不同,通过显示不同灯色的斑马线对车辆和行人进行双向警示的安全警示系统。杨艳等[9]针对行人过街与车辆冲突现象,设计了一种以单片机为核心并且可进行光电、声音双重提示的安全装置,以保证交通安全。
综上所述,国内外学者在设计行人过街安全系统的过程中,对信号过渡期间的解决方案考虑不够系统,尚未综合考虑人车特性,另外在预警时没有分车道精细化控制。为了解决信号过渡期间行人过街安全问题,同时兼顾人车特性,本文中设计一种基于车路协同的行人过街主动安全预警系统,在改进停车视距模型和行人过街安全心理模型的基础上,提出考虑人车特性的车辆安全制动距离模型。
1 系统设计
基于车路协同的行人过街主动安全预警系统共分为4个模块,即检测模块、控制模块、预警模块及无线通信模块,如图1所示。系统采用分布式结构,每个交叉口安置1个主控、3个副控,布置在交叉口斑马线尽头处的行人等待区,从而覆盖交叉口整个行人过街区域。系统具有行人检测、车辆检测、行人通过时间计算、系统内无线通信、智能斑马线变换灯色预警、语音警告等功能。
1.1 检测模块
检测模块包含车辆检测和行人检测2个部分。通过对行人和车辆双重检测,防止行人与车辆因信息不对称而产生不安全问题。
1.1.1 车辆检测
毫米波雷达通过发射电磁波并接收障碍物的反射波,可同时检测多车道、多目标的物体信息,用于检测交叉口各进口道停车线前是否有车辆停止。
采用视频检测的方式,并选择目前应用较广泛的差分图像法采集车速等信息。在交叉口进口道前预先设定视频检测区,并在视频检测区内划定一组虚拟线圈Loop 1、Loop 2,用于检测车速,以实现类似传统双线圈检测器的测速功能。
通过对所拍摄的视频进行图像差分分析,能够得到车辆通过2个虚拟线圈Loop 1、Loop 2的平均速度。车辆检测部分如图2所示。
分别提取相邻2帧图像的特征,即统计相邻2帧图像的RGB(红、绿、蓝三原色)值,再对2个RGB统计值进行差分,可得车辆经过Loop 1、Loop 2时产生的信号。图像RGB统计值的差分dRGB[10]为

(1)
式中:f(x,y,t)为第t帧图像点(x,y)处的像素值;RGB(·)为(x,y)处的红、蓝、绿色通道值以及灰度值的统计函数;M、N分别为图像的长度、宽度。 车辆经过Loop 1、Loop 2时产生的图像差分信号能反映车辆经过虚拟线圈的整个过程[10],如图3所示。
车辆通过Loop 1、Loop 2的平均速度va[11]为
(2)


图1 基于车路协同的行人过街主动安全系统组成

图2 检测模块中的车辆检测部分
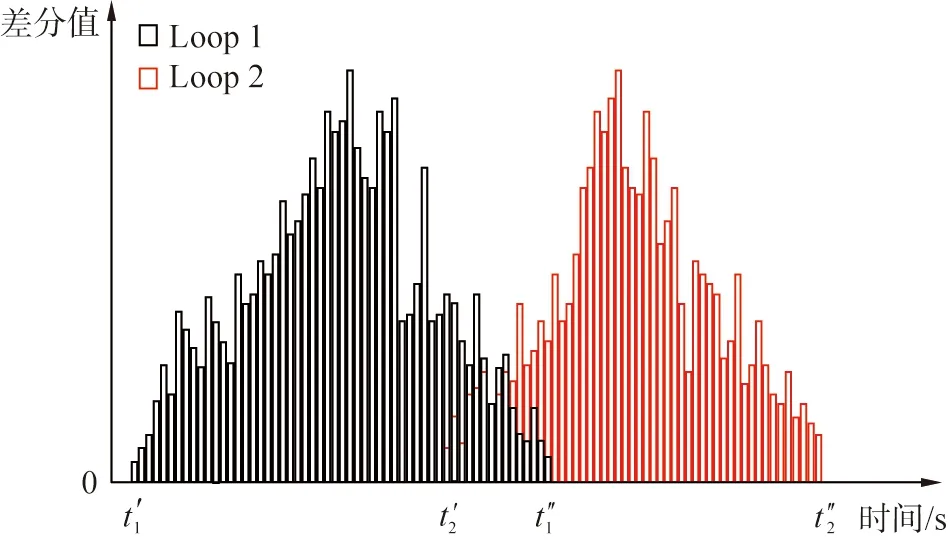
车辆到达、驶离Loop 1时的时间;车辆到达、驶离Loop 2时的时间。图3 车辆经过虚拟线圈Loop 1、Loop 2时产生的图像差分信号输出
根据各交叉口实际交通情况确定视频检测区中虚拟线圈划定的位置,依据实际工程案例中的经验,虚拟线圈一般设置在停车线前40 m左右处。
虚拟线圈位置确定后,需要计算车辆从虚拟线圈到停车线刚好能够安全停车的初始运行速度v0。v0由停车视距模型[12]反推得出,即
(3)
式中:S0为停车视距;t0为驾驶人制动反应时间,考虑到反应迟缓的情况,取为2.5 s;g为重力加速度,取为9.8 m/s2;φ为潮湿系数,在较潮湿的情况下取为0.4;φ为粗糙系数,取为0.03~0.05。
由式(3)反推出车辆刚好能够安全停车的初始运行速度v0后,通过比较v0与车辆驶过虚拟线圈的平均速度va,判断车辆是否处于安全车速。
1.1.2 行人检测
行人检测是对整个区域多个目标进行检测与跟踪的过程,为了保证数据的精确度与可靠性,采用敏感度较高、测速测距精度相对较高的调频连续波毫米波雷达。该雷达具有较强的抗干扰能力,能连续跟踪测得多个目标的距离与速度。行人检测部分如图4所示。

图4 检测模块中的行人检测部分
由于雷达捕捉较敏感,因此需要剔除与行人相似的其他目标物[13]。在判断目标物是否为行人时,设雷达到目标物顶端和底端的距离为l1、l2,雷达到目标物顶端和底端的夹角为α1、α2,可得检测到的目标物高度h为
(4)
由于行人一般高度为0.7~2 m[13],因此可将h与行人一般高度进行比较,判断并剔除不在高度区间内的目标,即非行人目标。
通过计算行人与雷达的相对距离可以确定行人所处的位置。行人与雷达存在相对运动时,距离的测算公式[14]为
(5)
式中:r为雷达与行人的相对距离;T为信号周期;c为光速;Δf-、Δf+分别为信号重叠后负向、正向调频段的差频信号频率;ΔF为调频带宽。
在行人相对雷达的运动过程中,也可测算行人运动速度[14],即
(6)
(7)
(8)
式中:Δf为发射信号和反射信号的频差;f0为发射信号的中心频率;vb为目标相对于雷达的运动速度;vp为行人运动速度。
通过检测行人的位置与速度,可以精确掌握各车道前方行人状况,与各车道检测到的车速形成配合,可以针对不同车道的不同情况,进行分车道精细化预警控制。
1.2 控制模块
控制模块包含微控制单元(MCU)、行人信号剩余时间读取、车速提取、行人运动检测、智能斑马线及语音提示桩控制6个部分。微控制单元以单片机为核心,读取行人信号剩余时间,在绿灯剩余时间为10 s时开始工作。当检测到行人存在过街意图但是无法在剩余通行时间内完成过街时,语音提示桩通过声音预警,提醒行人无法通过。当行人无视语音预警,执意过马路时,智能斑马线启动,根据不同情况变换颜色对行人和车辆进行双向预警。
为了判断行人能否完成过街或抵达安全岛,系统需要计算行人过街行程时间tp[15],即
(9)
其中:Lc为单条车道宽度;k为车道个数;x′、y′分别为斑马线左、右两侧行人个数;s为安全系数,一般取为5。
通过对比行人过街行程时间tp和行人绿灯剩余时间u,可判断行人能否完成过街或到达路中央安全岛。当语音预警无效,行人已在斑马线上时,根据前方下一车道停车线前车辆状态,智能斑马线预警可分为3种情况,如图5所示。

1)情况1。如果有车辆停止,则控制行人所在车道和前方下一车道前的斑马线红灯闪烁(见图5(a)),从而防止当信号切换时,车辆驾驶人因注意力不集中[16]或疏于观察而起步,造成交通事故。
2)情况2。如果目前无车停止,并且有超过安全车速的车辆驶来,则控制前方下一车道前的斑马线红色预警(见图5(b)),从而警告车辆和行人即将发生危险。
3)情况3。如果目前无车停止,并且有未超过安全车速的车辆驶来,则控制前方下一车道前的斑马线黄色预警(见图5(c)),从而警告驾驶人和行人在判断安全的情况下通过。
针对行人过街的全过程,控制模块的控制流程如图6所示。

u—行人绿灯剩余时间;tp—行人过街行程时间。图6 基于车路协同的行人过街主动安全预警系统中控制模块的控制流程
1.3 预警模块
预警模块包括语音提示桩和智能斑马线,语音提示桩采用现有交叉口语音提示桩即可,可重新修改现有交叉口语音提示桩的控制程序,接入到系统。如果交叉口无语音提示桩,则可增设语音提示桩。
Rista等[17]通过研究LED嵌入式标志对司机收益率的影响发现,采用LED嵌入式标志是人行道、较小运行速度处提高司机收益率的有效处理方案。鉴于此,选择LED灯作为智能斑马线发光组件,并将智能斑马线安装于传统斑马线位置代替传统斑马线。
考虑到在工程运用中,LED灯需要具有亮度高、易识别、寿命长、能耗低等特点,因此本文中选择ND16系列LED高亮指示灯,效果如图7所示。

图7 ND16系列发光二极管高亮指示灯效果
根据国家标准GB 5768.3—2009《道路交通标志和标线》中的规定,斑马线基本长度为3~5 m,每条宽度为45~60 cm,间距为60 cm。假设每条斑马线的长度和宽度均取最小值,可以确定理想情况下斑马线长度为300 cm,宽度为45 cm。
ND16系列LED高亮指示灯直径约为3 cm,每条斑马线中安置5列,LED高亮指示灯两两之间的间隔为5 cm,则每列需要布置300/(3+5)≈37个LED高亮指示灯,每条斑马线需要安置37×5=185个LED高亮指示灯。
考虑到智能斑马线在应用过程中需要有防水和抗压性能,因此在智能斑马线表面密封安装高强度钢化玻璃,使智能斑马线在保证透光性的前提下,具有很好的耐久性。同时,为了防止表面过于光滑造成行人和车辆打滑,对钢化玻璃表面作防滑处理。
另外,考虑到LED高亮指示灯容易产生眩光,影响行人与车辆的视觉,因此对钢化玻璃表面作防眩光(AG)处理[18],即在高强度钢化玻璃表面喷涂特殊化学制剂,使玻璃表面变为哑光漫反射表面。智能斑马线结构如图8所示。
1.4 无线通信模块
鉴于有线设备的铺设需要破坏路面,为了减少施工并提高系统的智能化程度,选择无线通信的方式进行系统内部和区域范围内多个系统的数据交换,如图9所示。

LED—发光二极管;I/O—输入输出。图8 预警模块中的智能斑马线结构
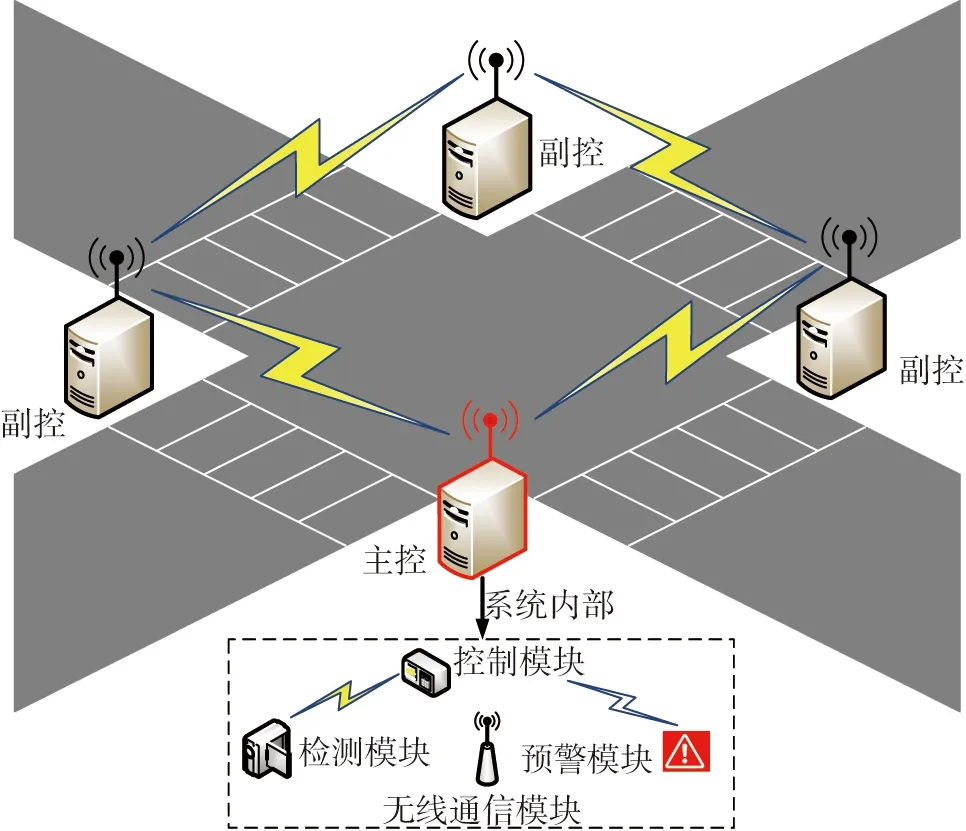
图9 基于车路协同的行人过街主动安全预警系统中的无线通信模块
无线通信主要通过物联网(IoT)模块进行,IoT模块固化于系统内部,通过通用异步收发传输器(UART)接口与单片机连接。通过IoT模块实现交叉口处各分布的系统间信息交互,同时也在系统内部各模块间同步车辆、行人和信号方案等数据,保证整套系统的协同运行。系统中交换的数据包括信号方案剩余时间、车速信息、行人过马路意图、斑马线上行人的位置及速度等。
2 考虑人车特性的车辆安全制动距离模型
在基于车路协同的行人过街主动安全预警系统的设计中,车辆检测部分采用停车视距模型。结合实际工程案例发现,当车辆向行人驶来时,尽管能够停在行人前方,但是会导致行人表现出变速、转向等随机性突出的行为,易产生安全问题。现有的停车视距模型仅考虑了道路因素和车辆特性,没有考虑行人特性,因此本文中综合考虑车辆和行人特性,构建一种考虑人车特性的车辆安全制动距离模型。
2.1 车辆最小安全制动距离模型改进
最小安全制动距离是车辆能够安全停车的最短距离,也称为停车视距。停车视距模型如式(3)所示。现有的停车视距计算模型仅考虑了驾驶人制动反应时间,而实际制动过程中还涉及克服制动踏板自由行程、车辆制动蹄与制动鼓接触的时间及驾驶人加大力度踩下制动踏板使制动减速度达到最大的时间。制动的后2个过程虽然时间较短,但是也应在模型建立过程中加以考虑。


t0—驾驶人制动反应时间,其中为制动意识时间,为制动行为时间;t1—制动减速度aj产生时间;t2—aj增大时间;t3—aj持续时间;t4—aj消除时间;O—坐标系原点;a—紧急制动信号接收时刻;b—制动踏板压力p产生时刻;c—aj产生时刻;d—p最大时刻;e—aj最大时刻;f—p消失时刻;h—aj消除时刻。图10 简化的车辆制动过程
根据车辆制动过程,在式(3)所示停车视距模型的基础上,同时考虑制动踏板自由行程、车辆制动蹄与制动鼓间隙、制动减速度上升时间以及道路纵坡等因素,提出停车视距的改进模型,即
(10)

2.2 行人安全心理制动距离建模
当车辆与行人发生冲突而需要制动时,如果仅满足最小安全制动距离,则会因车辆过快而导致停车过于靠近行人,对行人产生巨大的心理冲击[20]。由此可知,当车辆与行人发生冲突时,不仅要保证车辆的安全制动,还应考虑行人的安全心理距离,防止车辆过快或停车过于靠近行人造成行人恐惧等情绪,进而产生冒进、回跑等无法预测的危险行为。
行人过街安全心理距离Lp[21]为
(11)
式中:vi为第i车道车速;n为车道个数;tr为行人反应时间,平均值为1.8 s;Cs为到达车辆距行人的安全距离,取为3~5 m。
由于行人过街安全心理距离针对的是车辆不减速的情况,因此需要加入减速项进行修正。制动过程速度减小很快,忽略空气阻力,由力的平衡方程可得车辆制动减速度aj为
(12)
式中δ为旋转质量换算系数,一般取为1.1~1.4。
研究[22]表明,行人对安全心理距离的要求还与车辆类型和大小有关。当面对不同车辆类型和外观大小的车辆时,行人的安全心理距离为
(13)
式中:rs为行人面对不同车辆时的安全心理距离;K为行人的特征参数,与行人的性别、年龄、冒险行为倾向等因素有关,一般取值大于0;a0、b0分别为目标车身长度、高度;a*、b*分别为参考车辆的车身长度、高度。

(14)
2.3 考虑人车特性的安全制动距离建模
综合改进后的停车视距模型和行人安全心理制动距离模型,根据不同地段行人与车辆对路权要求程度的不同和车辆与行人的通行需求不同,在保证安全的前提下,将两者赋予不同的权重β,可得考虑人车特性的安全制动距离S为
(15)
其中β取值为0.5~1。为了保证车辆能够安全制动并兼顾到行人的心理影响,同时又不使安全停车距离过大而失去实际意义,β的取值一般不小于0.5。
忽略常数项,并把式(14)中的vi用各车道的v0替换,可得考虑人车特性的安全制动距离模型,即

(16)
为了直观地分析车辆初始运行速度v0和权重β对模型的作用,将其他因素取为定值,可得考虑人车特性的车辆安全制动距离曲面,如图11所示。
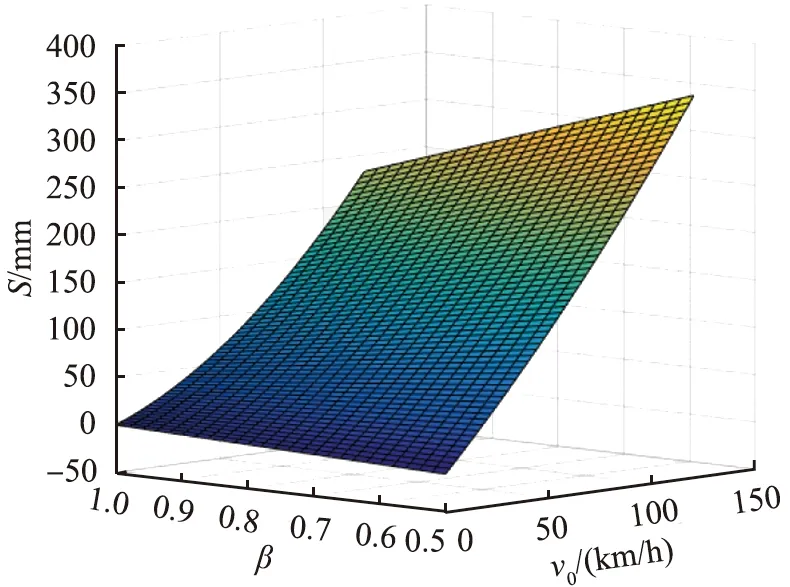
v0—车辆初始运行速度;β—权重;S—考虑人车特性的安全制动距离。图11 考虑人车特性的车辆安全制动距离曲面
3 模型对比分析
为了验证所提出的考虑人车特性的车辆安全制动距离模型的合理性与安全性,通过数值计算,将该模型与停车视距模型、停车视距改进模型、行人过街安全心理制动模型进行对比分析。
为了便于比较,将除了车辆初始运行速度v0和权重外的其他所有参数进行统一的标定与取值。
考虑到反应迟缓的情况,驾驶人制动反应时间取为2.5 s,制动力上升时间取为0.6 s,重力加速度g取为9.8 m/s2,在较潮湿的情况下潮湿系数取为0.4,粗糙系数取为0.04,道路纵坡度取为0,安全距离取为5 m;只讨论行人穿越某车道的情况,车道个数n取为1,单条车道宽度Lc设定为3.5 m,行人过街步速vp取为一般标准速度1.5 m/s,行人反应时间tr取为平均值1.8 s,到达车辆距行人距离Cs取为3 m,旋转质量换算系数取为1.2,求得车辆制动减速度aj为3.6 m/s2,行人特征参数K按一般情况取为1;按普通小汽车外观尺寸确定目标车身长度和高度分别为4.8、1.4 m,参考车辆的车身长度和高度分别取为5、1.6 m。

S0—停车视距;改进后的停车视距;Lp—行人过街安全心理距离;β—权重。图12 不同权重时考虑人车特性的车辆安全制动距离模型求解的安全距离
综上,通过对比不同权重时的考虑人车特性的车辆安全制动距离模型、停车视距模型、停车视距改进模型和行人过街安全心理制动距离模型,能直观地说明所提出模型的合理性和安全性。
4 结论
本文中针对交叉口信号过渡期间行人与车辆产生冲突的现状,基于车路协同理论,设计了一种行人过街主动安全预警系统,并针对现有停车模型未考虑对行人心理的现状,提出一种考虑人车特性的安全制动距离模型,得到以下主要结论:
1)所设计的系统实时检测行人和车辆的位置及速度,对行人与车辆的冲突进行分情况判别,针对不同情况运行不同的预警方案。通过语音提示桩对行人进行预警,通过智能斑马线的启亮红色、红色闪烁、启亮黄色,对行人和车辆进行双向预警,能够有效减少行人与车辆的冲突,避免交通事故。
2)所提出的模型在改进车辆停车视距模型的基础上,融合了行人安全心理距离和对车型影响的考虑,使得车辆制动安全性进一步改善,同时减小了制动过程对行人心理的冲击。
本文中针对行人过街安全问题从理论和技术2个方面提出了优化方案,为解决行人过街安全问题提供了新的依据。
猜你喜欢
品牌研究(2022年34期)2022-12-15
品牌研究(2022年36期)2022-01-01
海峡姐妹(2020年8期)2020-08-25
作文周刊·小学二年级版(2020年24期)2020-07-14
学生天地(2020年29期)2020-06-09
中国计算机报(2020年9期)2020-03-25
E动时尚·科学工程技术(2019年4期)2019-09-10
电子制作(2019年10期)2019-06-17
北京航空航天大学学报(2017年7期)2017-11-24
汽车与安全(2017年9期)2017-09-29
