
线控转向与主动防倾杆协同控制的仿真分析
2022-12-28 07:52牛振宇屈小贞
农业装备与车辆工程 2022年12期
牛振宇,屈小贞
(121001 辽宁省 锦州市 辽宁工业大学 汽车与交通工程学院)
0 引言
在车辆主动安全技术不断进步的同时,车辆底盘将会装备越来越多的控制系统。车辆控制系统直接叠加,并不能最大程度发挥控制系统的功能。协同控制是在独立子系统控制基础上,设计上层控制器用以解决各子系统之间的相互干涉,根据车辆的行驶状态把指令信号发送到下层各子系统控制器,从而优化车辆的综合控制能力。
在线控转向方面,日本熊本大学的研究团队开发了基于线控转向的试验车[1-2]。殷凡青通过研究线控转向理想传动比的控制策略,证明该策略可以提高车辆的操纵稳定性[3]。在主动防倾杆方面,Jeon 等研究了电机式主动防倾杆系统,验证了滑模控制算法能够明显改善车辆的动态性能[4]。解利臣设计的车辆防侧倾控制器可以有效降低车辆的车身侧倾角[5]。对于车辆协同控制的研究,Gordon等指出完全的集成控制较难实现,提出了一种折中的控制结构,即分层式协同模块化结构[6]。周兵等研究了主动横向稳定杆和AFS 的车辆稳定性协调控制,通过对协调控制的研究得出结论,协调控制在防侧倾的同时提高了车辆的横摆性能[7]。闫明帅通过对协同控制集成方法的研究,设计了分层结构协同控制器,有效保证了系统横摆与侧倾性能[8]。Pi Dawei 等通过对地面车辆容错机制的主动转向和主动防倾杆协调控制策略的研究,采用重建的模糊规则保证车辆横摆和偏航运动性能[9]。
上述研究对提高车辆稳定性进行了深入探讨,为避免子系统之间的相互影响,采用目前最广泛认可的方法,设置协同控制器实现子系统的综合控制。但研究的是主动转向与主动防倾杆的协同控制,没有考虑与最新的线控转向系统进行协同控制,而且采用的协同控制策略也不同。本文提出采用模糊控制策略实现线控转向与主动防倾杆的协同控制,以此来提高车辆操纵稳定性的要求。
1 整车动力学模型
建立整车动力学模型,规定以车辆质心位置为原点,汽车前进方向为x 轴正方向,驾驶员左侧为y 轴正方向,车辆质心上方为z 轴正方向。建立转向运动模型如图1 所示,建立的侧倾运动模型如图2 所示。以此坐标系为依据,建立整车三自由度动力学模型,即侧向运动、横摆运动和侧倾运动。

图1 转向运动模型Fig.1 Steering motion model
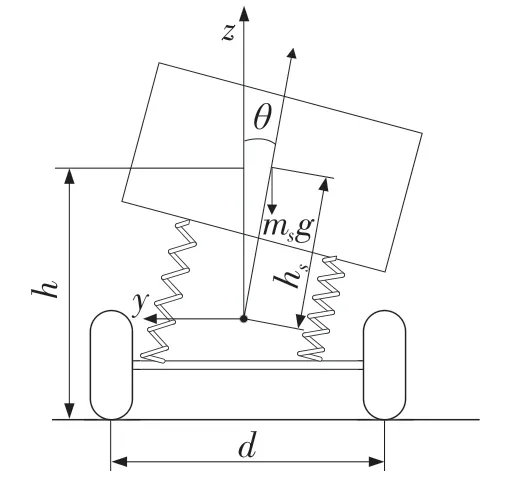
图2 侧倾运动模型Fig.2 Roll motion model
侧向运动:

横摆运动:

侧倾运动:

式中:m——整车的质量;ms——车辆的簧上质量;——车辆侧向加速度;vx——沿x 轴方向的车速;ωr,——车辆横摆角速度、横摆角加速度;h——车辆质心高度;——车身侧倾角、车身侧倾角速度、车身侧倾角加速度;Fy1、Fy2、Fy3、Fy4——车轮所受的侧向力;δ——前轮转角;Iz——簧上质量绕z 轴的转动惯量;Ixz——簧上质量绕x、z 轴的惯性积;a——质心到前轴距离;b——质心到后轴距离;Ix——簧上质量绕x 轴的转动惯量;hs——质心到侧倾中心的高度;Ixy——簧上质量绕x、y 轴的惯性积;g——重力加速度;K——弹簧刚度;C——阻尼系数;Uanti-roll——主动防倾杆提供的反侧倾力矩。
车辆仿真的主要参数如表1 所示。

表1 整车仿真主要参数Tab.1 Main parameters of vehicle simulation
2 协同控制设计
车辆在行驶过程中,由于道路状况的复杂性,在大角度转向过程中,当轮胎附着力达到极限时,线控转向通过变角传动比改变转向角度已经不能很好地控制车辆稳定行驶,此时通过协同控制输出对前后主动防倾杆的力矩分配,减小前轴左右垂直载荷变化量,可增加前轴总的侧向力;协同控制输出的附加转角,可以增加线控转向系统的作用,提高车辆横摆稳定性。设计的协同控制框图如图3 所示,采用分层式控制器,上层控制器为协同控制器,下层控制器为线控转向控制器和主动防倾杆控制器。
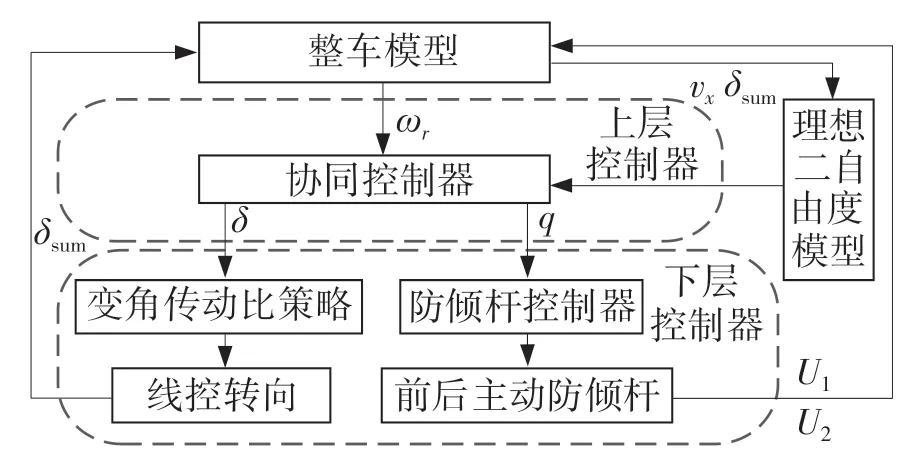
图3 协同控制框图Fig.3 Cooperative control block diagram
2.1 上层控制器设计
模糊控制是通过软件模拟人类大脑思维发展出来的控制方法,使判断更智能化。由于模糊控制策略具有自适应能力强,适合非线性系统的特性,于是本文通过设计模糊控制器,达到这2 个子系统的协同控制。
模糊规则协同控制器把理想的横摆角速度与实际的横摆角速度误差e 及其变化率ec 作为输入,输出为附加前轮转角δ和主动防倾杆的前后轴力矩分配系数q。其中横摆角速度误差e 和误差变化率ec 的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},输出附加前轮转角δ的模糊子集为{NB,NM,NS,ZO,PS,PM,PB},输出前后力矩系数的模糊子集为{ZO,S,M,B,G}。采用三角函数隶属规则,附加前轮转角δadd和前后力矩分配系数q 的模糊控制规则表如表2 和表3 所示。

表2 δadd 模糊规则表Tab.2 δadd fuzzy rule list
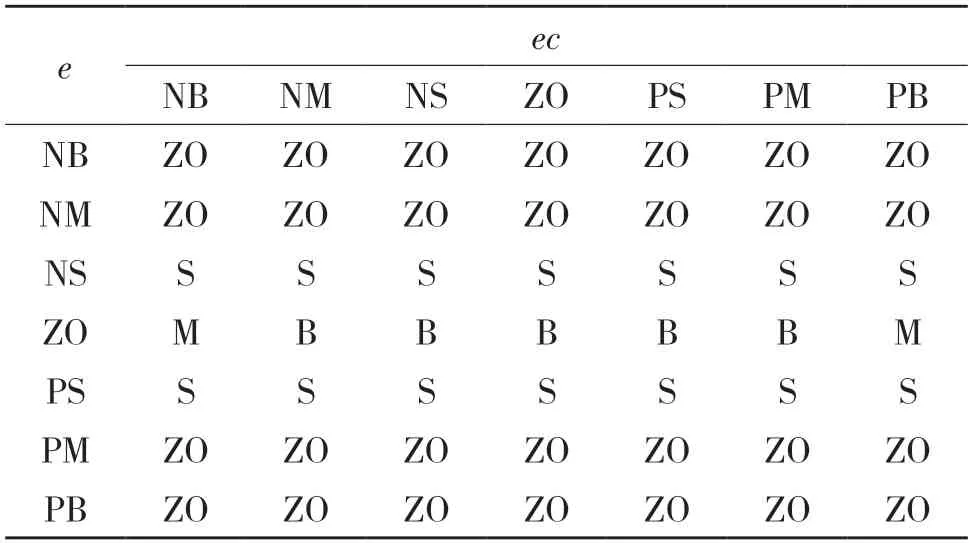
表3 q 模糊规则表Tab.3 q Fuzzy rule list
协同控制后的车辆前轮转角为:

式中:δsum——车辆的前轮转角;δ1——线控转向系统输出的前轮转角;δ——协同控制后输出的附加前轮转角。
协同控制后的前轴主动防倾杆力矩:

协同控制后的后轴主动防倾杆力矩:

式中:U1——前轴主动防倾杆力矩;Uanti-roll——主动防倾杆提供的反侧倾力矩;q——主动防倾杆的前后轴力矩分配系数;Sign——符号函数;ωr——横摆角速度;U2——后轴主动防倾杆力矩。
车辆的横摆角速度对路径跟踪能力和转弯半径的大小有很大的影响,所以在协同控制器中以车辆实际横摆角速度与理想的横摆角速度误差为输入,通过协同控制器计算前轮附加转角,叠加到车辆的线控转向子系统中;计算出车辆的前后主动防倾杆力矩分配系数,输入给主动防倾杆子系统,以此为基础对前后主动防倾杆的力矩进行调节,对提高车辆行驶稳定性很有利。
2.2 下层控制器的设计
2.2.1 线控转向系统设计
线控转向作为最新的转向形式,通过变角传动比策略,能有效改善车辆的转向性能,使车辆更加平稳地行驶。本文的变角传动比根据稳态横摆角速度增益不变设计,变角传动比设计:

式中:vx——车速;L——轴距;m——整车质量;a——质心到前轴的距离;b——质心到后轴的距离;k1——前轮侧偏刚度;k2——后轮侧偏刚度;Kw——转向灵敏度的值。
当车速小于20 km/h 时,为了提高车辆的转向灵敏度,减少方向盘的转向角度,将最小传动比设为6;当车速为20~90 km/h 时,为了使车辆在不同的行驶速度下有着相同的转向响应特性,采用根据稳态横摆角速度增益不变而设计的变角传动比;当车速大于90 km/h 时,为了防止车辆在转向中方向盘过于沉重,将最大传动比设为25。
线控转向中的传感器采集车辆方向盘转角和实时车速控制框图如图4 表示。根据变角传动比的设计,得到车轮的名义转角,名义转角会实时传递给整车模型,控制车辆的转向。
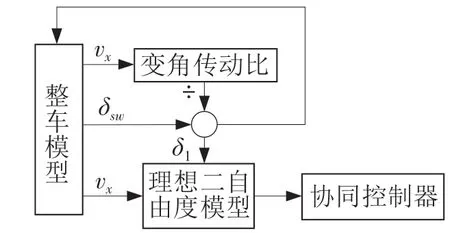
图4 线控转向控制框图Fig.4 Steering-by-wire control block diagram
2.2.2 主动防倾杆系统设计
主动防倾杆分别布置在车辆的前轴和后轴,在转向工况和两侧路面不平的道路上行驶时,通过施加在车辆左右两侧的反侧倾力矩,可以有效改变车身的姿态,使车身侧倾角控制在某一区间,提升车辆行驶时的安全性和乘员的舒适度。
针对主动防倾杆设计的PI-PD 控制器输出如式(8)、式(9):
式中:UPI(s)——PI 控制器输出;UPD(s)——PD 控制器输出;——比例、积分和微分的模块增益;E(s)——误差信号;Y(s)——系统输出。
主动防倾杆提供的侧倾力矩可以有效减少车辆的侧倾角,对于主动防倾杆的控制,设计的控制框图如图5 所示,主动防倾杆控制策略采用PI-PD的控制策略,车辆的目标侧偏角与车辆实际侧偏角作为偏差,通过PI-PD 控制器输出对应的主动侧倾力矩,分别施加到前后轴主动防倾杆上,实现对车辆侧倾角的控制。

图5 主动防倾杆控制系统框图Fig.5 Block diagram of active anti-roll bar control system
3 协同控制系统仿真结果与分析
3.1 阶跃工况
为了对比线控转向和主动防倾杆协同控制与各子系统独立控制的有效性,设置阶跃工况进行验证。设定车速为80 km/h,路况附着系数为0.85,在MATLAB/Simulink 和CarSim 的联合仿真后得到车辆的横摆角速度、质心侧偏角和车身侧倾角的仿真结果。
仿真结果表明:经过协同控制的车辆,在阶跃工况下,随着车辆侧向加速度的增加,协同控制器发挥作用。车辆运行时间到1 s 时,横摆角速度和质心侧偏角的峰值小于无协同控制的车辆,如图6和图7 所示,当车辆继续行驶时,车辆横摆角速度和质心侧偏角均小于无协同控制的车辆,波动幅度也相对较小,这说明经过协同控制,车辆的操纵稳定性比无协同控制的会有一定程度的提高。协同控制与无协同控制的车身侧倾角都可以控制在1.25°以内,如图8 所示,这主要是因为车身的侧倾角都是2 个系统的优化目标,说明在车辆行驶过程中,车辆的行驶安全性可以得到保证。
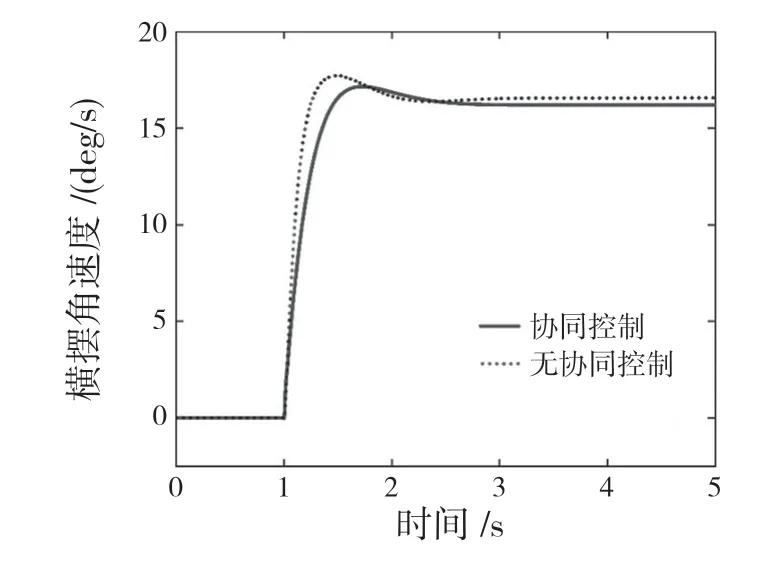
图6 横摆角速度Fig.6 Yaw velocity

图7 质心侧偏角Fig.7 Side slip angle
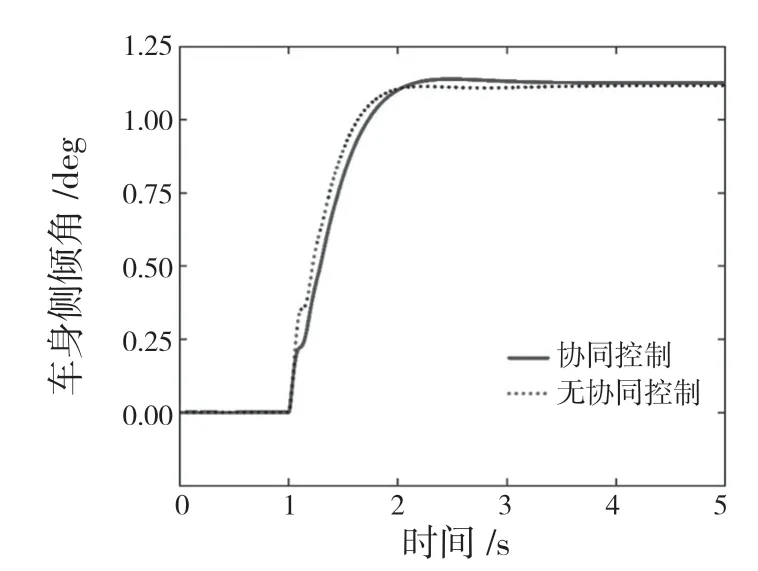
图8 车身侧倾角Fig.8 Vehicle roll angle
3.2 双移线工况
双移线工况可测试车辆在复杂工况行驶的操纵稳定性,为了测试设计的协同控制器的有效性,采用CarSim 自带的双移线试验工况。设定的初始车速为80 km/h,路面附着系数为0.85,在MATLAB/Simulink 和CarSim 联合仿真后得到横摆角速度、质心侧偏角和车身侧倾角的仿真结果。
仿真结果表明:在双移线工况下,随着车辆方向盘转角的变化,车辆横摆角速度和质心侧偏角在转向时会发生相应变化,经过协同控制的车辆与无协同控制的车辆相比,可有效控制车辆转向时横摆角速度和质心侧偏角的峰值,如图9 和图10 所示,峰值会降低1.0°~1.5°,可以降低车辆不稳定工况的出现,提高车辆的操纵稳定性。对于车身侧倾角,线控转向与主动防倾杆的协同控制与无协同控制,都可以使车辆的车身侧倾角控制在1°左右。如图11 所示,协同控制的车辆在转向时峰值有较小幅度的减小,说明协同控制与无协同控制的车辆都可以保证车辆在行使时的车身稳定性,提高了车辆的行驶安全性和乘员的舒适性。

图9 横摆角速度Fig.9 Yaw velocity

图10 质心侧偏角Fig.10 Side slip angle

图11 车身侧倾角Fig.11 Vehicle roll angle
4 结论
(1)建立了整车三自由度动力学模型,对线控转向和主动防倾杆协同控制策略进行了分层式设计,上层为协同控制器,下层为线控转向与主动防倾杆子系统控制器。协同控制器采用模糊控制策略,线控转向系统设计了变角传动比策略,主动防倾杆系统采用PI-PD 控制策略。
(2)对建立的线控转向与主动防倾杆协同控制模型进行阶跃工况和双移线工况的仿真试验,仿真结果表明,线控转向与主动防倾杆协同控制和无协同控制相比,可有效降低评价指标的峰值,控制效果优于无协同控制的车辆,通过对主动防倾杆前后力矩分配的调节,车辆也可以保持一定的不足转向特性,车辆的操纵稳定性和行驶安全性可以得到有效的提高,证明了协同控制的有效性。
(3)对于本文中设计的模糊协同控制器,在今后的研究中,可以采用智能优化控制算法进行优化,提高控制器的控制效果。
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
汽车之友(2021年23期)2021-12-24
北京航空航天大学学报(2021年4期)2021-11-24
电子制作(2018年9期)2018-08-04
汽车工程师(2018年3期)2018-07-12
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
应用科技(2015年5期)2015-12-09
中国铁道科学(2015年4期)2015-06-21
航天器工程(2014年5期)2014-03-11
