主动声呐B显图像中的疑似目标自动拾取算法
2022-11-21 04:41余杰蔡志明王平波
哈尔滨工程大学学报 2022年10期
余杰, 蔡志明, 王平波
(1.海军工程大学 电子工程学院,湖北 武汉 430030; 2.中国船舶集团公司 第715研究所,浙江 杭州 310012)
B显是现代主动声呐的主要显示图像,它在方位(波束)-距离(时间)平面上以亮度或伪彩形式给出回波强度展示[1-3],可视为一种空间能量谱。声呐操作员根据B显图,并结合听音结果,进行目标判型。随着主动声呐向低频、大功率、大孔径方向发展[4],其探测范围不断扩大,但识别能力却提高有限,导致声呐B显图像呈现的“满天星”状日趋严重,操作员难以从中辨识出目标亮点。B显图像中所谓“亮点”,是依据能量聚集性规则挑选出的局部极值点(或块)。其中,目标和杂波亮点被界定为疑似目标,物理上对应于潜艇、水面舰艇等运动目标,或海底大型结构物、海上固定作业平台等静止目标。疑似目标亮点的结构与位置相对稳定,从B显图像中拾取这些亮点,是目标跟踪与辨识的前提基础。
传统上,需训练提高声呐操作员的识图与听音能力,使其能依靠经验与观感,手动对B显图像做合适调亮,用肉眼观察筛选出疑似目标亮点,并在其方位上进行听测,然后综合多帧(也称PING)情况做出判决。此方法人为因素大、耗时长、效率低,且往往伴随较高的漏警或虚警,亟待优化[5-6]。
为更好解决B显图像中疑似目标拾取问题,提高声呐系统操作效率和自动化水平,本文提出一种疑似目标自动拾取算法,包括:图像自动调亮、自适应二值化、形态学闭运算、连通区域标测与前景/背景标定、全域极值点遍历提取、极值点视在信噪比计算、亮点检取双阈值计算、亮点阈值检测与综合筛判等处理环节,有机运用图像分割[7]、图像形态学[8-9]、统计模型[10]拟合等通用方法,并基于主动B显疑似目标拾取对这些方法做适应性设计。
该方法无需人工干预,调亮、二值化、双检取阈值等参数的计算都是自适应的。由于自动划分了前景与背景2个区域,且分别赋予不同检取阈值,因此较全局单阈值法漏报率低,为后续PING间累积和跟踪识别打下良好基础。
1 B显图像的一般特性与调亮处理
1.1 B显图像的一般特性
以拖线阵主动声呐为例,典型B显图像如图1,其上呈现出多种回波样态。依图像直观,这些回波样态大致可分为:目标亮点(TP)、杂波亮点(CP)、混响亮点(RP)、混响亮区(RZ)、强辐射源亮条(VB)、拖船亮条(PB)和直达波亮区(DZ)等。
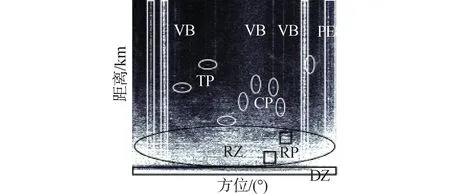
图1 典型的主动声呐B显图像
TP、CP在物理上对应于运动或静止的实体目标,是B显图像上的疑似目标;RP无实体目标对应,而RZ为大量混响亮点叠加。VB为远场舰船辐射噪声在主动声呐匹配频段上的泄漏,而PB为近场拖船噪声在匹配频段和近端射指向上的泄漏。DZ则为发射声直达波及其一次海底反射波,往往是最强亮区。
这些回波样态强度不同。图像亮度合适时,TP或CP能量聚集性较好,VB和PB的纵向尺度接近贯通,PB更宽且近距离处更强,RZ及DZ具有较大散布面积,RP也有聚集性,但亮度较小或略大。可逐步筛取此类回波样态图像特征,来拾取疑似目标。
上面提及的样态特征,是对单帧B显图像而言,是本文研究利用的对象。通过对多帧图像特征挖掘,可进一步明确疑似目标,比如通过连续多帧间亮点重复性考察,可排除混响亮点,本文不作展开。
1.2 B显图像的调亮处理
因距离近衰减小且近端向指向性差等因素,PB和DZ共同作用,会在B显图像的近端射方向近距离处形成一块很强的亮区,整幅B显图像的自然动态范围很大,如图2所示。
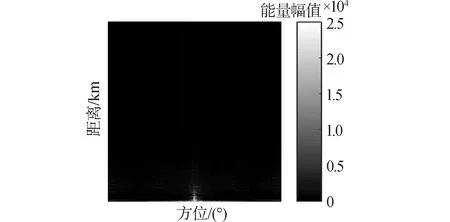
图2 B显图像原始数据
图2中中下方(对应小掠射方位和很近距离)有一块极强亮区,能量高出其他区域数个数量级。受此处极值影响,在全局线性归一化下,图像的大部分区域都处于低量化值水平,无法观察到图像细节和其余亮点。
因此,在分析、拾取疑似目标前,需首先对B显图像调亮处理(截断式非线性放大与归一化操作),遍历其图像中每个点Pi,将其乘以适当的系数:
(1)
式中:α为调亮步进幅度参数,α∈(1,2]∩R;n为调亮系数;α越大,则改变n引起的调亮变化率越大;Dmax为结果量化的最大值,结果中大于Dmax的值被截断处理。传统主动声呐装备的调亮过程由人工操作,每次操作,n增大或减小1,全局遍历求取Pi值,图像亮度整体变化一次,直至找到适合操作员研判的图像亮度。未被合理调亮的B显图像可能处于欠亮或者过亮的状态,其外观如图3所示。

图3 调亮不合适的B显图像
欠亮状态,某些低强度疑似目标亮点无法被拾取;过亮时,某些高强度疑似目标亮点可能被截断,使面积扩散失去点状特征,又或因其他高强度干扰亮条/亮区的截断扩散被掩盖。对某一强度疑似目标合适的亮度选择,可能对其余强度疑似目标并不合适,需反复调整。因此,手工调亮耗时耗力,难以形成一致的亮度设置和统一拾取效果。为实现疑似目标自动拾取,首先需构建B显图像自动调亮算法。
2 疑似目标自动拾取算法
本文提出的B显图像中疑似目标自动拾取算法,包括图像自动调亮、自适应二值化、形态学闭运算、连通区域标测与前景/背景标定、全域极值点遍历提取、极值点视在信噪比计算、亮点检取双阈值计算、亮点阈值检测与综合筛判等环节。算法流程如图4。
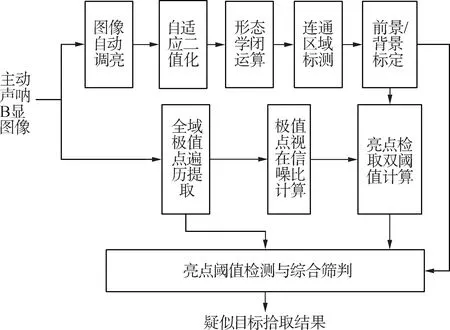
图4 本文算法流程
2.1 图像自动调亮
1.2节介绍了B显图像自动调亮算法的重要性。其关键在于自适应选取调亮系数n;考察一组以连续调亮系数处理后结果的直方图,如图5。
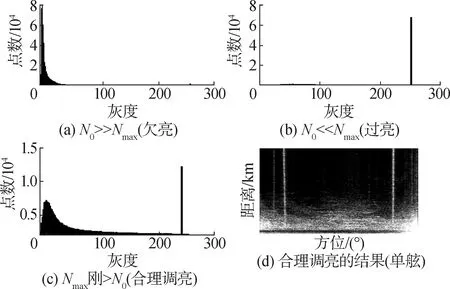
图5 合理调亮结果及其直方图特征对比
如图5所示,若近0值总数(N0)和近超大值总数(Nmax)处于N0≫Nmax,如图5(a),则继续增大调亮系数n,直到当Nmax>N0第1次发生,如图5(c),则对应的n可视为最优调亮系数;相应的,图5(d)为合理调亮的B显图像。若继续调亮,则B显图像会趋于过亮状态,其直方图如图5(b)所示。
2.2 自适应二值化
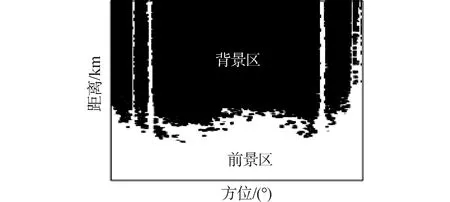
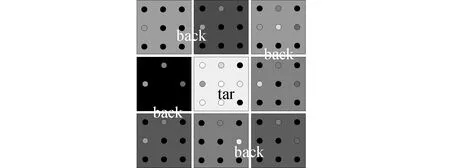
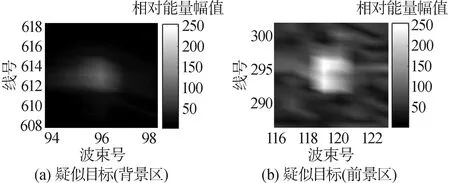
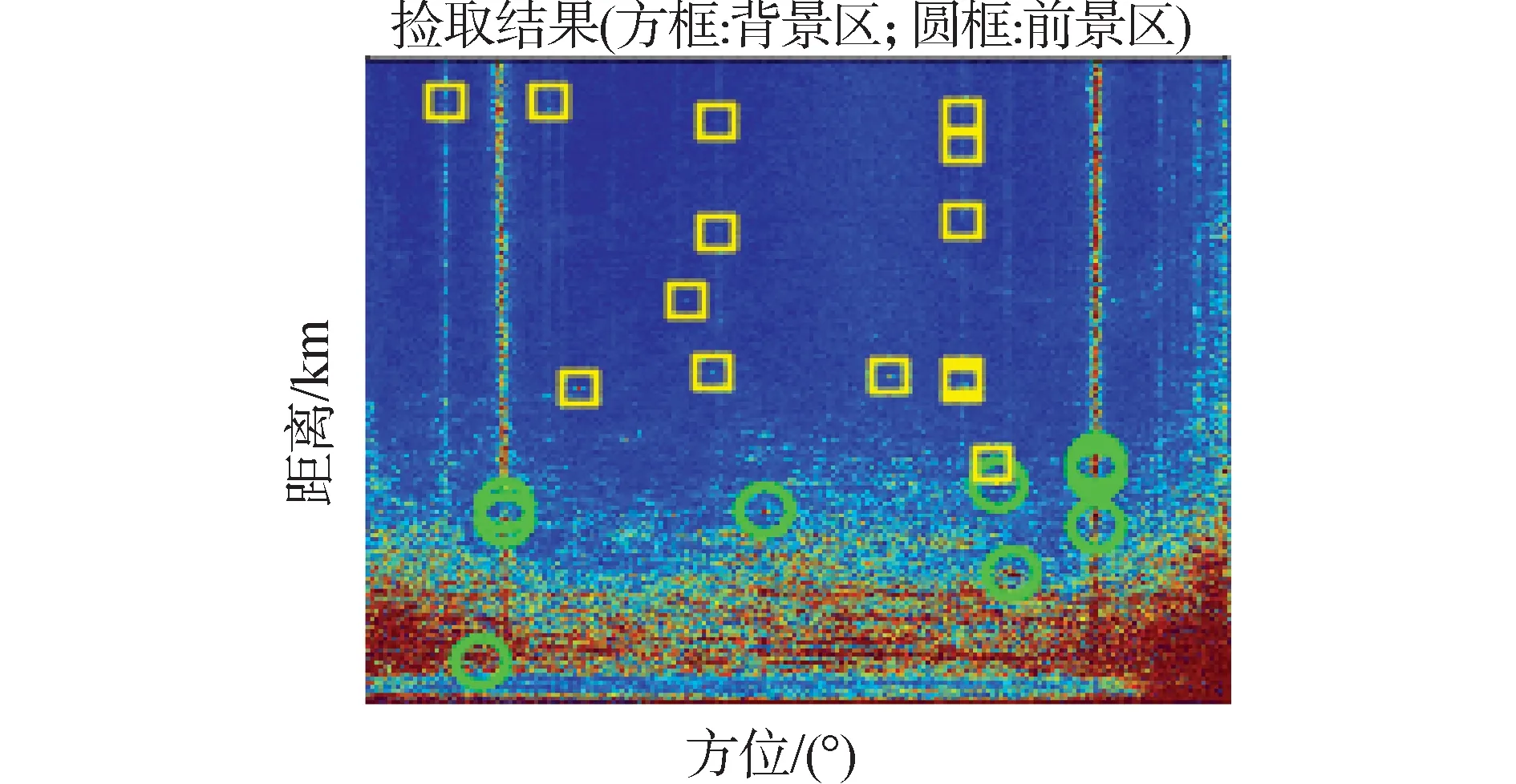
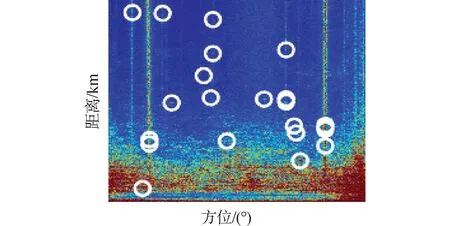
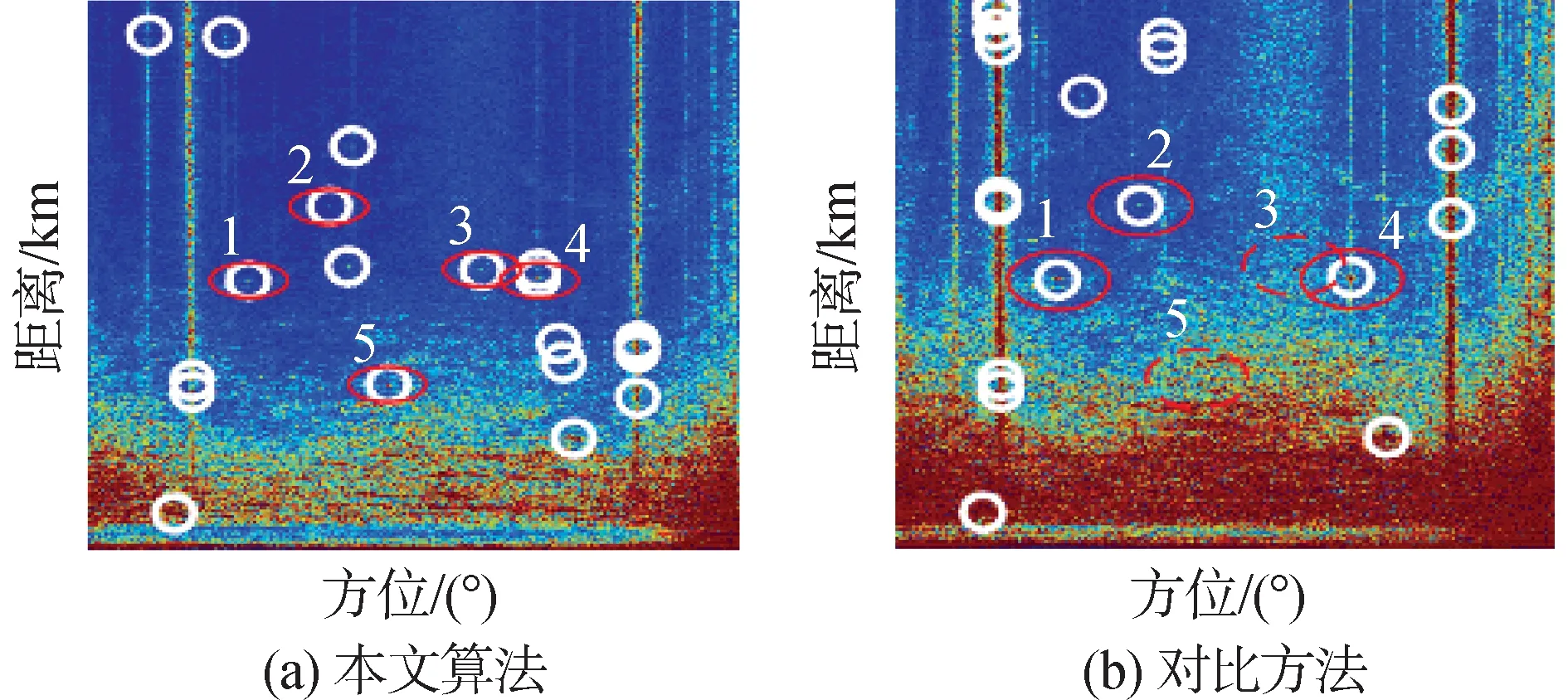
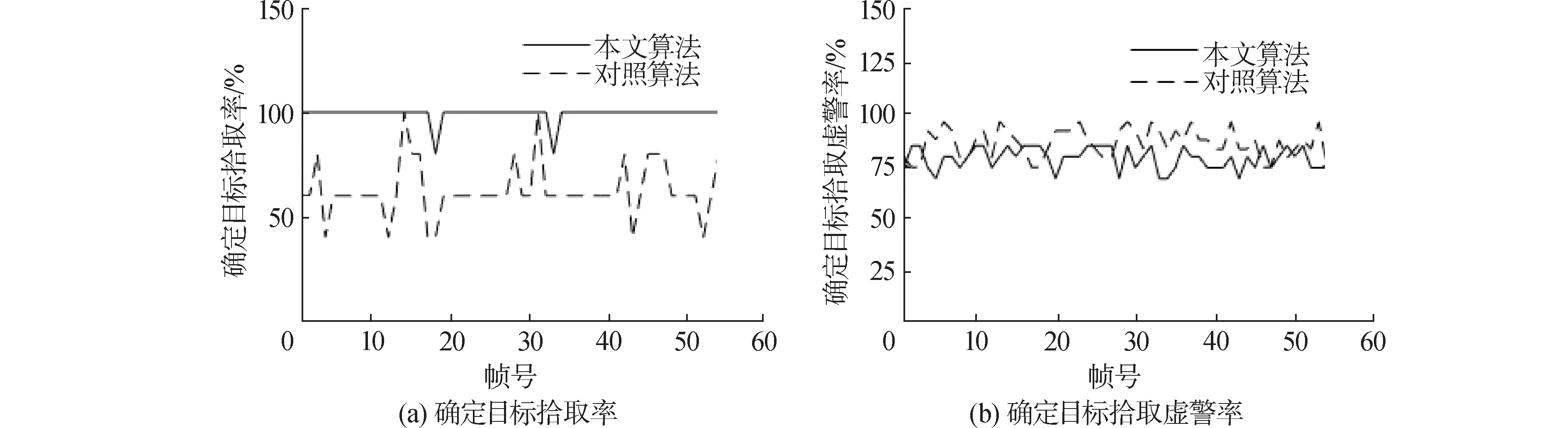
经合理调亮后,根据图像中每个点的能量大小,将每个点自然区分为“亮”与“暗”2态。此处理过程对应图像二值化算法。本文应用最大熵二值分割算法,利用图像熵为准则做图像分割。给定一特定阈值q(0≤q 式中:P0(q)、P1(q)分别表示q阈值分割的背景和前景像素的累计概率,两者之和为1。背景和前景对应的熵为: (2) (3) 处于该分割阈值时,图像总熵为: H(q)=H0(q)+H1(q) (4) 遍历找到图像总熵的最大值,将其对应的分割阈值q作为自适应二值化阈值,结果如图6所示。 图6 二值化处理结果 图6中大部分目标、杂波、混响亮点、混响亮区,强辐射亮条都作为“亮”状态与其他部分区分。 考察二值化处理结果可见,一些 “亮”态点趋于连片,而另外一些“亮”态点相对孤立。运用数学形态学,填充趋于连片的“亮”态点间孔隙,形成图像上的连通区域。 数学形态学利用探针(结构元素)收集图像信息,当探针在图像中按某种规则不断移动时,便可获得图像内部各个形状间的关系,从而了解图像的结构特征。 设f(x,y)是输入图像,b(x,y)是结构元素,用结构元素b对图像f进行膨胀和腐蚀运算,算子分别定义为: (f⊕b)(s,t)=max[f(s-x,t-y)-b(x,y)] (f⊖b)(s,t)=min[f(s+x,t+y)-b(x,y)] f关于b的开运算和闭运算算子分别定义为: f∘b=f⊖b⊕b (5) f·b=f⊕b⊖b (6) 式中:⊖、⊕、·和∘分别是腐蚀、膨胀、开运算和闭运算的运算符。 形态学算法中,结构元素选择为关键环节。考察B显二值化图,可观察到2种典型孔隙:被动竖状干扰孔隙以及连片干扰孔隙,如图7(b)。设计结构元素1(竖线型)和结构元素2(菱形),如图7(a);结构元素1用于前者填充,其闭运算效果如图7(d);结构元素2用于后者填充,其闭运算效果如图7(f);处理全过程如图7(b)~(f)所示。 图7 结构元素设计及闭运算算法示意 进一步考虑结构元素设计,可认为结构元素1与2组合类似于纺锤型,符合主动回波内在构型,波束维有展宽,距离维有多途效应与脉压;形成了此部分理论分析的纵深空间,本文不再赘述。 经形态学闭运算处理,“连片”之间的孔隙已被填充,在图像上形成连通区域。提取每个连通区域并标记,并做适当筛选即可标定出前景与背景区域。 应用区域生长法标定每一连通区域。其基本原理如图8。图8(a)灰色区域为待遍历的连通区域。任选其中一点,如图8(e)黑点,若其8邻域中有灰点,则标记,得到图8(f),而后考察被标注所有点的连通区域中是否有灰点,依此类推,直到被标注所有点的8邻域中没有灰点,如图8(h)。 图8 区域生长法步骤示意 标出所有连通区域,并统计各连通区域的面积(总点数)。以面积均值为阈值,保留大于阈值的连通区域,将其全集定义为前景区,并将B显图中非前景区的部分定义为背景区,如图9。 图9 双区域划分结果示意 通过逐点扫描整幅方位距离能量图,提取每个中心点八邻域点的值,若中心点的值为这9点中最大,则该点被视为一个局部极值被提取。 遍历所有被提取的局部极值,计算每个局部极值的视在信噪比。视在信噪比表示局部极值“所在区域”相较于其“周边参照区域”的“凸显”程度。 局部极值“所在区域”,可确定为极值点及其八邻域。一般地,方位维与距离维上的图像点即对应信号处理输出的方位分辨元与距离分辨元,所以极值点的八邻域点分别对应2个维度上的三分辨元,这是合理的。局部极值的“周边参照区域”可一般性地取“所在区域”的八邻域区域,如图10所示。并且一般地,八邻域区域的大小可与局部极值所在区域的大小一致。考虑到不同距离上目标能量所占据的方位分辨元数量不同,那么距离近的周边参照区域或许应相应大些。 图10 局部亮点的视在信噪比计算示意 为简化处理,本文的周边参照区域大小与局部极值所在区域的大小一致。截取B显图像中包含单个疑似目标的“所在区域”及其“参照区域”的部分进行观察,如图11所示。显然,这2个疑似目标的能量相对集中于方位维上约2~3个点、距离维上约3个点,说明上述区域大小的分析是符合现实的。 图11 疑似目标邻域形态示意 视在信噪比的具体算法为:对于任意一个局部极值点,取其所在区域的9个点计算能量均值,作为视在信噪比中的“信”部分,记作tar;统计周边参照区域的72个点的能量均值,作为视在信噪比中的“噪”部分,记作back。如图11所示。 任一局部亮点p的视在信噪比计算为: (7) 将比值取ln,使back 一幅B显图像中,局部极值点数量可达几千个。针对B显中的背景与前景区域,分别统计所有局部极值点视在信噪比,形成2个统计分布结果。由于任意2个极值点的选取不发生相互影响,且其视在信噪比计算方法统一,可视为相互独立同分布的随机过程,根据大数定律,可视为高斯分布形态。用高斯分布拟合这2个统计分布结果,其示意图如图12。 图12 2个区域局部极值视在信噪比分布 图12(a)、(b)中,2区域的极值点视在信噪比均值μ都接近0,即大多都非疑似目标亮点,而为随机起伏;毕竟,疑似目标出现为小概率事件。疑似目标视在信噪比应处于上述高斯分布右拖尾区。此外,B显图像自动数据处理不能替代前端信号处理,即不打算拾取弱小能量目标,只在意孤立的点目标。 经统计运算,图12所对应B显图像中,前景区域标准差σ为0.26,背景区域为0.38,两者差异明显,体现出此2区域能量起伏程度特性上的差异。 应用高斯分布特性,计算亮点捡取阈值:统计前景/背景区极值点视在信噪比均值,记为μ1与μ2;其标准差,记作σ1与σ2,则双阈值DT1与DT2为 (8) 式中:β1和β2分别为前景与背景区检取阈值的微调系数,默认为0。 按所在区域,将所有局部极值与对应检取阈值DT1、DT2进行大小比较,检取所有大于阈值的局部极值,其结果如图13所示。 图13 双阈值能量检测结果 图13中,方形框标注背景区中捡取结果;圆形框标注前景区中捡取结果,作为初筛疑似目标。经观察,在被动竖状干扰波束上往往存在较多成排点被检取,若不加以处理,显然增加了疑似目标虚警。然而,疑似目标却可能在被动竖状干扰波束上,不可一刀切全部排除,可通过能量排序方式处理,即限定单条强辐射源亮带上的初筛疑似目标最大数量为M个(M是小的正整数)。其物理意义是,强辐射源信号作为远方平面波入射,在亮带上是方位聚集的,而亮带整体是距离平稳的;疑似目标则一般同时在方位和距离上聚集,若恰有疑似目标位于亮带上,则一般是有限的聚集,就可与亮带相区分。 综合判筛后,得出最终疑似目标的拾取结果,如图14所示,其中圆形标注即被拾取的疑似目标。 图14 综合判筛后的拾取结果 经上述多环节处理,最终自动地从主动B显图像中拾取出疑似目标。为后续的基于多PING方法进一步筛选研判提供基础。 利用2019年7月南海某海域实验数据验证本文算法有效性,本次实验包含5个确定目标,分别为水面活动目标、水下活动目标以及水面静止目标。 通过去除自动调亮及双阈值捡取过程,即使用手动调亮与全局图像单阈值捡取,可视为去除了本文算法核心机制,保留其他处理机制与其一致,作为对比算法,也可视为近似于人工拾取法的模拟。 分别使用本文算法与对比算法对实验数据中相同B显图像做处理,拾取结果如图15所示。 图15 不同算法的处理结果对照 如图15,本文算法拾取到所有5个确定目标,对比算法(手动调亮+单阈值法)漏检目标3与目标5。 应用本文算法处理实验数据,共处理连续54帧B显图像数据。结果中,每帧拾取的疑似目标总数约二十几个。其中包括非确定疑似目标,这些非确定疑似目标或许是本文算法不应拾取的虚假点,亦或是海上的确存在的疑似目标,只是我们未知。 对于单帧处理,本算法力求拾取全部疑似目标,并限制虚警最大值。在对此实验数据处理中,限制单帧拾取疑似目标最大数量为32,这是基于探测场景的经验值,同时就限制了单帧拾取的最大虚警。后续可观察连续多帧处理结果,以进一步排除虚警。 因实验数据中存在较多非确知疑似目标,因此,对疑似目标拾取虚警的准确判定与定量研究需依赖多帧帧间信息,本文算法尚未涉及,不做详细展开。 对于连续多个单帧的处理,统计了本文算法与对比算法对确定目标的拾取率以及对确定目标的拾取虚警率,如图16所示。 图16 连续多个单帧拾取结果统计 结果表明,本文算法在连续54帧拾取到几乎所有确定目标(仅在其中2帧各有1个目标遗漏),确定目标平均拾取率高于99%;而对比算法则具有相对较高的确定目标漏报率,如图16(a)。当然,本文算法与对比算法在连续54帧处理中,都表现出相对较高的确定目标拾取虚警率,其中本文算法对确定目标拾取虚警率稳定在75%左右,略低于对照算法。因处理的实验数据中确定目标为5个,则综合表明,本文算法中疑似目标拾取虚警最大值得到了限制。 1)本文提出一种主动B显图像中疑似目标自动拾取方法。该方法属于信号处理之后的数据处理,基于数据处理实现目标信息的自动提取。本文的数据处理不打算弥补或提升信号处理,即不打算实现检测信噪比增益,只在意从信号处理大量的检测分辨单元中自动发现与报告孤立亮点。这是针对单PING数据的处理,以此为基础可进一步实现多PING数据连续处理,并由此可实现目标疑似程度的甄别、目标运动要素提取、目标形态提取以及目标识别等。 2)本文算法包括图像自动调亮、自适应二值化、形态学闭运算、连通区域标测与前景/背景标定、全域极值点遍历提取、极值点视在信噪比计算、亮点检取双阈值计算、亮点阈值检测与综合筛判等处理环节;并利用海试数据,通过算法对比验证了本文算法效能。结果表明,本文算法在确定目标的检测率上比传统类人工拾取方法优越,并且,因为将拾取范围分为前景背景2区域考虑,具有低漏报率。 关于形态学结构元素的精细化选取以及与分辨元相结合的局部极值点视在信噪比计算在本文中尚未展开讨论,将于后续研究工作中继续开展。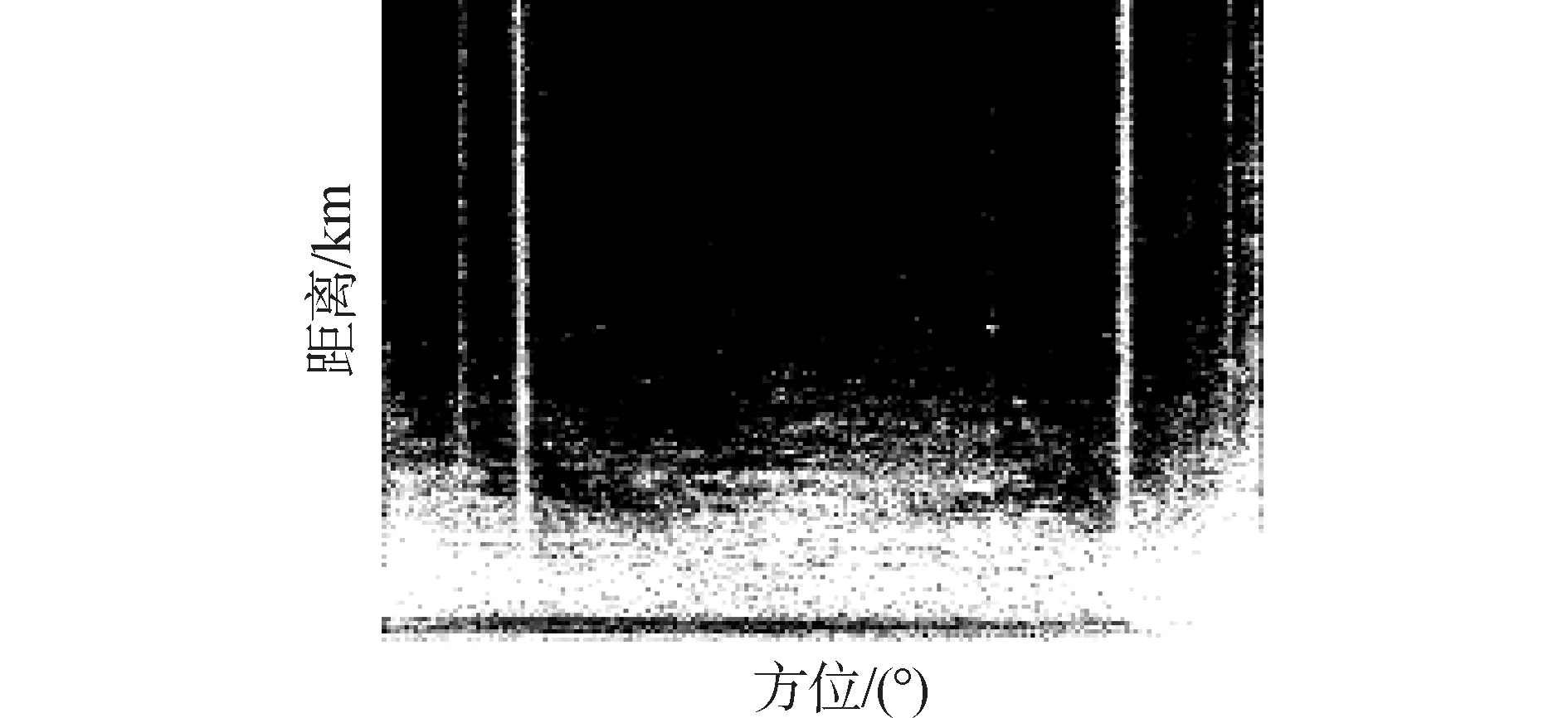
2.3 形态学闭运算

2.4 连通区域标测与前景/背景标定

2.5 全域极值点遍历提取
2.6 极值点视在信噪比计算
2.7 亮点捡取双阈值计算

2.8 亮点阈值检测与综合筛判
3 算法效能验证与性能对比
3.1 算法性能比较研究
3.2 利用连续多个单帧图像验证本算法效能
4 结论
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
重庆大学学报(2022年2期)2022-02-28
北京理工大学学报(2021年12期)2022-01-13
建材发展导向(2021年19期)2021-12-06
计算机仿真(2021年6期)2021-11-17
北京理工大学学报(2021年8期)2021-09-14
数学学习与研究(2020年16期)2020-12-28
语数外学习·高中版中旬(2020年5期)2020-09-10
语数外学习·高中版中旬(2020年10期)2020-09-10
智能计算机与应用(2020年4期)2020-08-31