
二维动态显微镜的光学系统设计
2022-11-12 10:23路雨桐冯大伟向阳刘永坤吕思航
长春理工大学学报(自然科学版) 2022年5期
路雨桐,冯大伟,向阳,刘永坤,吕思航
(长春理工大学 光电工程学院,长春 130022)
线纹尺是几何量计量的主要的实物标准,随着工业和科学技术的发展,线纹计量更广泛地应用于精密机床和加工中心的坐标位移测量、测绘中大长度的遥感精密测量等各个领域[1],而如今在超精密影像测量仪、光学显微镜、坐标测量机等几种工业生产最重要设备的校准和溯源中[2-3],所使用的线纹样板刻划从单一直线发展为十字线、圆环、矩形等多种形式,因此,实现对二维线纹样板的高精度标定对线纹计量尺度由一维至二维的发展具有重要意义。
在2017年中国计量院研制出的新型1 m激光干涉比长仪中,对一维线纹尺的测量不确定度达到U=(0.1+0.1L)µm(k=3,L-m),达到国内先进水平,其中一维光电显微镜对准装置对准精度在k=1时优于30 µm[4]。
为实现二维线纹样板的溯源测量,解决在样板溯源测量中对二维线纹样板的高精度对准这一关键问题,在一维动态光电显微系统的基础上,设计了一种应用于比长仪的二维动态光电显微镜光学系统。系统由分光系统、物镜成像系统、观察系统、照明系统组成;其中,分光系统采用消偏振分光棱镜,消除多次折反射后由于偏振使分光光束强度不一致的情况,保证了差分电信号幅度的一致性;照明系统为科勒照明,在物面形成均匀照明;物镜成像系统采用两对双胶合物镜,结构简单,可适用于现有大部分不同线宽、线间距、形状的线纹尺;观察系统将到达狭缝的像成于分划板再经二次反射成像于CCD图像传感器上,便于调整较准狭缝于线纹位置及方向。相较于一维动态光电显微镜,系统结构紧凑小巧;改目视调整系统为CCD调整,操作性强;整体光学系统结构简单,成像质量和光学参数均达到了系统指标要求。
1 工作原理
1.1 比长仪工作原理
激光干涉比长仪的总体结构如图1所示,比长仪主要以动态非接触的光学定位方法瞄准被测长度,其中光电显微镜作为瞄准工具。

图1 激光干涉比长仪总体结构图
测量时,待测线纹尺随精密气浮测量滑台沿一方向匀速移动,线纹移动的变化量经光电转换变为交流电信号。刻线中心经过动态光电显微镜时,会发出采样脉冲,实现对刻线黑度中心的瞄准,并触发双频激光干涉仪读数,得到线纹的位置信息,同时利用环境参量测量法修正空气中激光波长以及材料温度膨胀系数对测量结果的影响[5]。其中,光电显微镜的瞄准精度直接影响线纹尺的标定精度。
1.2 二维动态光电显微镜工作原理
如图2所示,二维动态光电显微镜基于一维动态光电显微镜[6],采用双狭缝瞄准方式,照明系统在刻尺面形成均匀照明,成像系统及分光系统将X、Y两个方向的线纹分别成像在两组狭缝上,狭缝宽与线纹像宽相近,狭缝部分透光,其余部分镀亮铬,以便使狭缝及线纹的像经观察系统被CCD所接收;狭缝后接光电倍增管,在线纹尺沿一方向移动时,到达狭缝的像移动造成狭缝处光通量变化,经光电倍增管转化为电信号,观察系统与狭缝调整系统相配合使每组的两狭缝在空间方向上错开约为一个狭缝宽度的距离,且每一方向的狭缝与线纹像相平行,因而获得两列具有一定相位差的钟形信号,利用差分原理取两列信号交点作为刻线中心位置,供激光干涉仪读数。

图2 二维动态光电显微镜原理框图
2 显微镜光学系统设计
2.1 总体光路设计
对基于二维动态光电显微镜的工作原理,显微镜的总体光路图如图3所示,总体光学系统由物镜成像系统、照明系统、观察系统组成,以分光系统联结,对三部分光学系统分别进行设计,进行整合。系统工作波段为可见光波段,纵向光路总长小于300 mm,保证系统体积精巧,且适于比长仪实际安装使用需求。
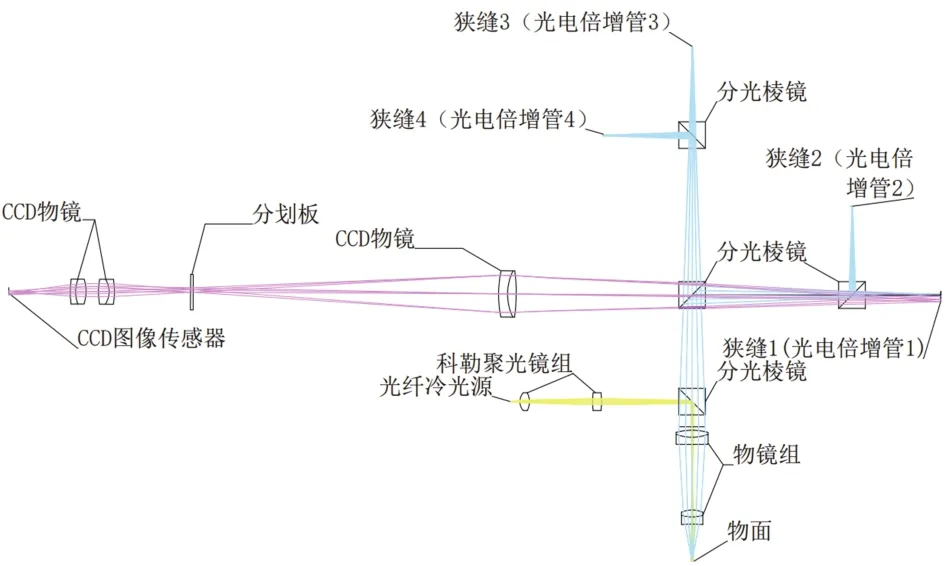
图3 显微镜的总体光路图
2.2 物镜光学系统设计
线形二维线纹线宽值一般为4~20µm,线间距200~500µm,圆形线纹直径一般为0.1~0.5 mm,刻尺截面有直线及U型,如图4所示即为二维线纹标准器的一种形式。

图4 二维线纹标准器示例
结合使用需要,综合考量如下几点:为保证对准精度,显微镜分辨率应高于线纹尺线纹最小线宽;为便于调整,任意时刻视场中应至少有一条刻线;不同线宽的线纹成像宽应与狭缝宽相近以获得较高的灵敏度和信噪比[7-8];镜头工作距应可适应不同形状厚度的刻尺;显微镜纵向尺寸不宜过大。确定显微物镜参数要求如表1所示。

表1 显微物镜设计参数要求
由于系统的数值孔径较大,为矫正产生的高级球差,采用李斯特物镜,即一组双胶合透镜的形式来减小系统的像差,以得到更好的成像效果。采用物方远心光路消减物平面在光轴方向移动产生的误差[8],从而很大程度上提高系统的精度;为方便控制显微系统共轭距,对系统进行倒置设计[9]。运用Zemax软件进行优化,首先设计10倍物镜系统,在保持共轭距与一胶合透镜不变的情况下对另一胶合透镜进行优化,最终得到5、10、20倍物镜光学系统结构图如图5(a)、图 5(b)、图 5(c)所示,光学调制传递函数(MTF)如图 6(a)、图 6(b)、图 6(c)所示。
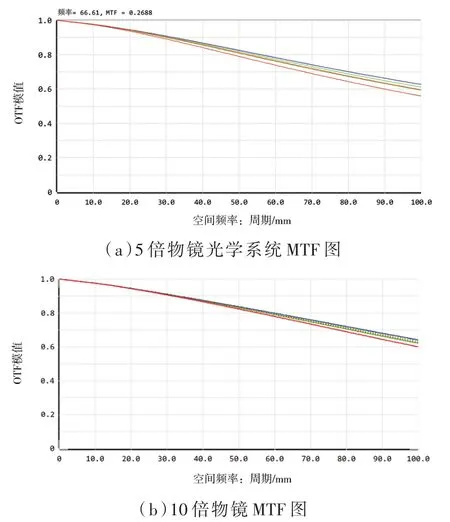

图5 物镜光学系统光路图

图6 物镜光学系统MTF图
可见5、10、20倍物镜在100 lp/mm处所有视场MTF值均大于0.5,满足成像需求。最终设计结果如表2所示。

表2 显微物镜设计结果
2.3 照明系统设计
目前显微镜的照明方式以科勒照明为主,主要用于不透明材质的刻尺。科勒照明的光源成像在物镜入瞳面上,光源发出的光经集光镜成像于后置可变光阑上,聚光镜再将此光源成像在物镜的入瞳面上。前置可变光阑位于集光镜之后,并被聚光镜成像于物面上,调节后置可变光阑可以使照明系统与不同数值孔径的物镜相匹配,调节前置可变光阑则可以改变物面上的照明范围[10]。
在本文设计的光电显微系统中,以20倍物镜成像物镜代替科勒照明的聚光镜进行照明光学系统设计。光源选型为Nikon C-FLED2光纤光源,数值孔径0.18,取光源直径大小为0.02 mm,光源发出的光,经过聚光镜及分光棱镜后成像于孔径光阑位置处,通过物镜后成像于无穷远处,在物平面上获得一个均匀的照明。设计的透镜光路如图7所示,配合5、10、20倍物镜最终照明面相对照度及光迹图如图8-图10所示,验证照明均匀度均符合照明要求。

图7 照明光学系统光路图
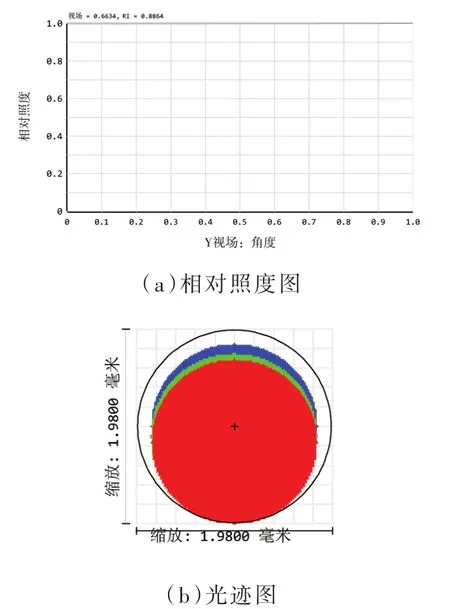
图8 5倍照明光学系统设计结果

图9 10倍照明光学系统设计结果
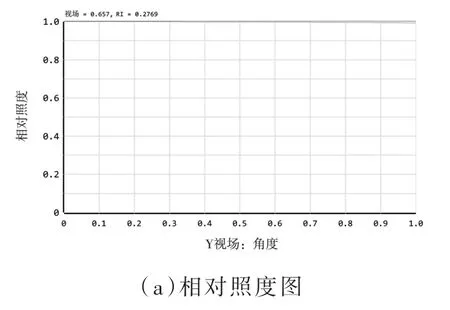
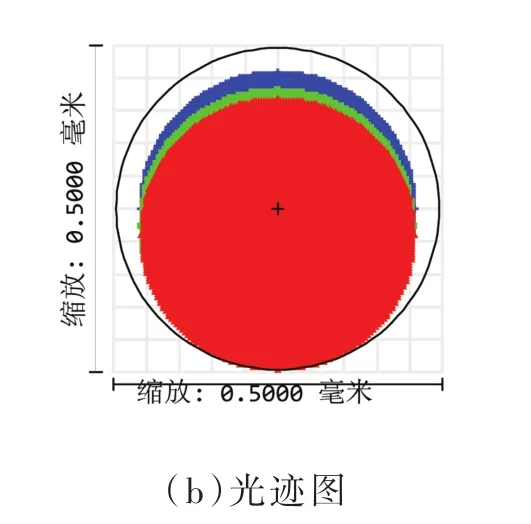
图10 20倍照明光学系统设计结果
2.4 观察系统设计
为了对刻线在狭缝处的成像情况进行观测及调整,刻线在狭缝处的像经光电倍增管反射和物镜成像中间像于分划板上,再经二次成像于CCD上,其中分划板作为调整狭缝与线纹之间相对位置的基准,由于不做测量用途,因而不对光学系统分辨率做过高要求。
CCD选型为加拿大灰点相机GRAS-50S5M-C,传感器尺寸为2/3″,像元尺寸3.45µm,使用时功耗小、发热低,因而减小由于温度变化对实验精度的影响。
根据所选CCD分辨率及屏幕尺寸,为保证CCD传感器接收到的像高大于1/2传感器屏幕尺寸,设计CCD观察系统的参数为:线视场2y=6 mm,放大倍率0.5~1倍,最终设计放大倍率为0.83倍,符合设计要求,且受实际比长仪机械结构限制,在光路中加入一五棱镜实现光路90°偏折,设计观察系统的透镜结构图及像质评价如图11(a)、图11(b)、图 11(c),可见 50 lp/mm处两像面各视场MTF值均大于0.2,符合成像需求。
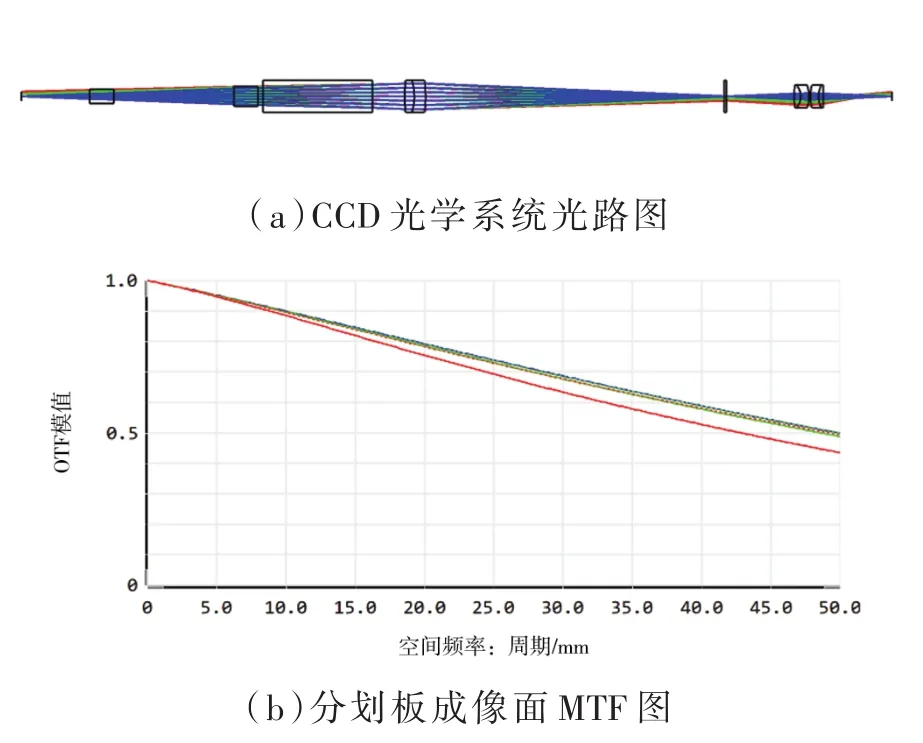
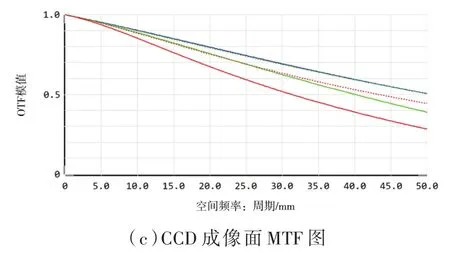
图11 CCD光学系统设计结果
3 公差分析
在光学设计完成后,为避免光学系统在加工、装配时由于公差分配不合理而导致的成像性能下降的问题,利用敏感度蒙特卡洛分析法对成像光学系统稳定性进行分析,并为它制定合理的公差分配,确保光学系统的成像质量能够达到要求[11]。表3所示为经过公差分析计算后各元件允许的公差容限,并且表中所有的公差容限在实际加工及装配中均可实现。
在表3所示的公差容限下,对该系统执行1 000次蒙特卡洛分析,分析结果如表4所示。系统数据表明在合理的公差容限下系统成像质量均可达到要求。

表3 系统各元件允许的公差容限
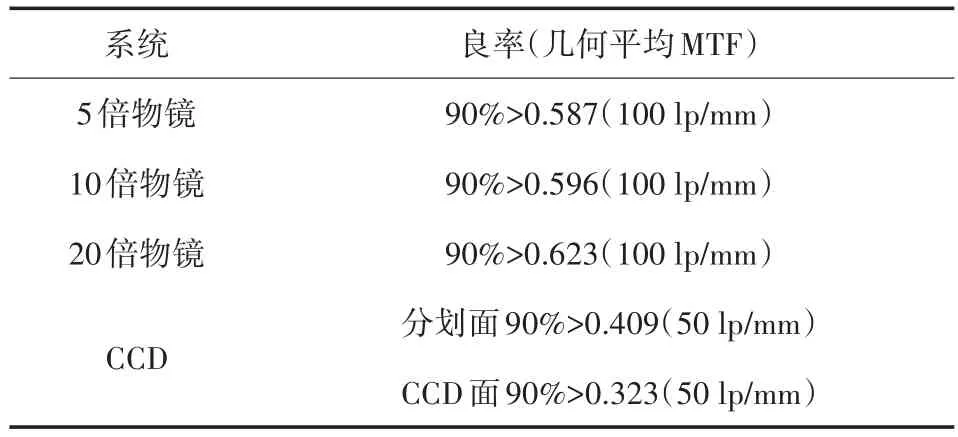
表4 公差分析计算结果
4 结论
本文介绍了一种应用于二维线纹样板检测的二维动态光电显微镜的工作原理,给出了光学系统的具体结构和参数,5、10、20三种不同的倍率可适应不同宽度的线纹,考虑到不同样板尺的厚度和形状,对应6~20 mm的工作距离,保证系统适用范围全面;设计对准精度高,可满足对高精度线纹样板的检测要求。在充分考虑结构要求、加工成本后,设计了一高分辨率、高精度、加工简单、加工成本低的二维动态光电显微镜,解决了二维线纹样板的对准问题,在工业生产与检测等领域有着广阔的应用前景。
猜你喜欢
新技术新工艺(2022年10期)2022-11-21
桂林电子科技大学学报(2022年3期)2022-10-26
少儿美术(2020年1期)2020-12-06
重型机械(2020年3期)2020-08-24
计测技术(2020年1期)2020-04-10
教学考试(高考生物)(2017年4期)2017-12-13
综合智慧能源(2017年10期)2017-01-18
综合智慧能源(2016年1期)2016-02-03
中学生数理化·八年级物理人教版(2015年11期)2015-11-30
科学中国人(2015年8期)2015-07-14
