
一种菌棒仿生自动套袋装置的研制
2022-11-09 11:36:12黄双成郜海超刘士林薄云飞
包装与食品机械 2022年5期
黄双成,郜海超,刘士林,张 军,薄云飞
(1.河南应用技术职业学院 机电工程学院,郑州 450042;2.河南铭匠电气有限公司,郑州 451191;3.西峡神威机械设备有限公司,河南西峡 474550;4.南京邮电大学,南京 210003)
0 引言
我国作为食用菌栽培最早的国家之一,经历几十年的持续发展,已经成为世界上食用菌生产大国,2017年食用菌总产量已突破3712万吨[1],占世界食用菌总产量的70%。我国在农业产业中高度重视食用菌的有效利用,特别是十九大之后,各级地方政府都将发展特色食用菌产业作为脱贫攻坚的主导产业,全国已超过70%的贫困县将食用菌产业作为带动农民脱贫致富的主产业进行重点支持,食用菌产业走上了发展的快车道。
菌棒栽培是我国食用菌生产的主要方式,无论是工厂化生产还是其他作业方式,装袋环节都是菌棒生产方式的核心环节,也是用工量最大,强度最大的工序之一。当前菌棒栽培方式中的菌料搅拌和菌棒装料等工艺基本实现了自动化,但在出料筒套袋流程中依然需要手动套袋,成为制约菌棒栽培工厂化的关键因素之一。面对我国人口老龄化,劳动力成本逐年攀升和当前国内对菌袋装料设备研究主要以菌袋装料作业的单工序设备为主的局面[2],研制一种应用于国内市场的菌棒自动套袋装置非常有必要。基于先前对菌棒栽培装袋环节的研究与实践,参考文献[3-5]的成果,改善和优化实现方式,设计并制作一种菌棒仿生自动套袋装置。利用气动+机械装置完成取袋、开口、撑袋和套袋4个基本动作,配合菌棒装袋机的装袋工艺,完成菌棒装袋生产中自动套袋和自动装袋的工艺操作。改变传统食用菌菌棒生产中人工套袋,自动装袋现状,提升菌棒栽培中套-装袋环节中自动化程度,彻底解决套-装袋环节生产效率低,劳动强度大的问题,加快食用菌产业装备转型升级,促进菌棒栽培的工厂化进程。
1 套袋装置结构与工作原理
1.1 套袋装置结构
套袋是食用菌菌棒生产的一个工序[6],通常配合装袋机的套筒完成1次装袋作业。套袋装置结构主要有机架、取袋装置、送袋装置、开口装置、撑袋及套袋装置组成,如图1所示。整机设计为双工位[7],即一个工位完成套袋,另一个工位完成装袋,设备实现套-装一体化连续作业,提升设备的生产效率。
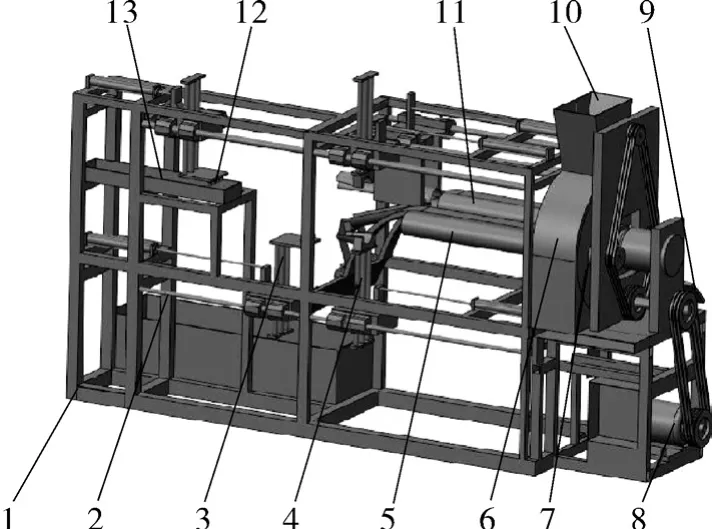
图1 菌棒仿生自动套袋装置结构图Fig.1 Structure diagram of bionic automatic bagging device of mushroom sticks
1.2 装置流程与工作原理
套袋环节主要参照人工套袋作业的工艺流程,分为5个部分,详细如图2所示。
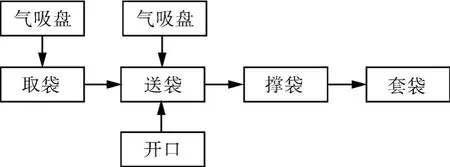
图2 套袋工艺流程Fig.2 Bagging process flow
装置工作原理:系统初始化完成后,两工位转盘有一个初始位置,即转盘锁定不动,让套袋筒与撑袋装置共线。装置开始工作,开口装置下吸盘工作气缸运动至袋仓上方位置完成吸袋后[8],运动至开口装置下吸盘上方打开袋口;撑袋装置水平移动至袋口打开处,撑袋装置气缸动作完成撑袋操作;撑袋完成后,撑袋装置上的导轨装置快速移动,将袋子套到套袋筒的外壁上完成套袋操作;鸭嘴张到最大位置后快速返回,此时完成第1次套袋作业。之后两工位转盘转动180°,新的套筒再次与撑袋装置共线,第1次套袋完成的料筒进行装袋作业,新共线的套筒进行第2次套袋操作,依次循环,装置进行不停机连续套-装作业。
2 套袋装置关键部件设计
装置套-装袋袋长58 cm,直径为18 cm,是一端封口的塑料袋。
2.1 取袋装置设计
取袋装置主要完成将塑料袋从袋仓里面取出,结构如图3所示。具体动作为袋仓上方的上气吸盘将塑料袋吸起,由导轨水平移动至下吸盘位置上方,完成取袋操作。

图3 取袋装置结构Fig.3 Structure of bag taking device
2.2 开口装置设计
开口装置主要完成塑料袋的开口操作,结构如图4所示。通过上、下吸盘将塑料袋吸附,利用上下气缸移动完成开口操作。

图4 开口装置Fig.4 Opening device
2.3 撑袋装置设计
撑袋装置是衔接开口装置和套袋装置的中间环节,也是套-装袋的关键,详细结构如图5所示。通过上下鸭嘴以及分别与其连接的气缸完成。为提高套袋效率,在鸭嘴上采用环丝结构,增大鸭嘴上摩擦系数,确保撑袋后不滑落。

图5 撑袋装置Fig.5 Bag supporting device
2.4 套袋装置设计
套袋装置主要是通过撑袋装置上的导轨将鸭嘴上撑开的塑料袋套装在料筒外壁上。套袋完成后,鸭嘴张到最大后返回,此刻完成1次套袋作业。两工位转盘转动一个工位,将该筒送入装袋环节,同时送来空闲套筒,进行新一轮的套袋作业。
3 套袋装置的电气控制系统设计
装置对各运动部件的运动位置要求控制精准,采用光、机、电、气、磁相结合。由于气缸动作相对简单,但套袋工艺时序先后动作要求严格,系统采用PLC+触摸屏的方式实现。
3.1 PLC选型及I/O分配
根据套袋工艺要求,系统选配性能可靠、抗扰能力强、性价比较高的信捷XC系列PLC,具体型号为XC3-24R-E,同时配置I/O扩展模块,模块型号为XC-E16PXYR-E。PLC控制系统接线如图6所示[9-10],I/O分配如表1所示。

图6 套袋装置PLC接线图Fig.6 PLC wiring diagram of bagging device

表1 套袋装置控制系统I/O分配表Tab.1 I/O allocation table of bagging device control system
3.2 PLC程序设计
根据套袋工艺需求和系统对控制时序的严格要求,编制PLC程序如图7所示。

图7 套袋装置PLC程序Fig.7 PLC program of bagging device
为监控装置安全运行,提升装置的可靠性,系统增加触摸屏,对传感器和关键运动状态进行实时采集,其界面如图8所示。
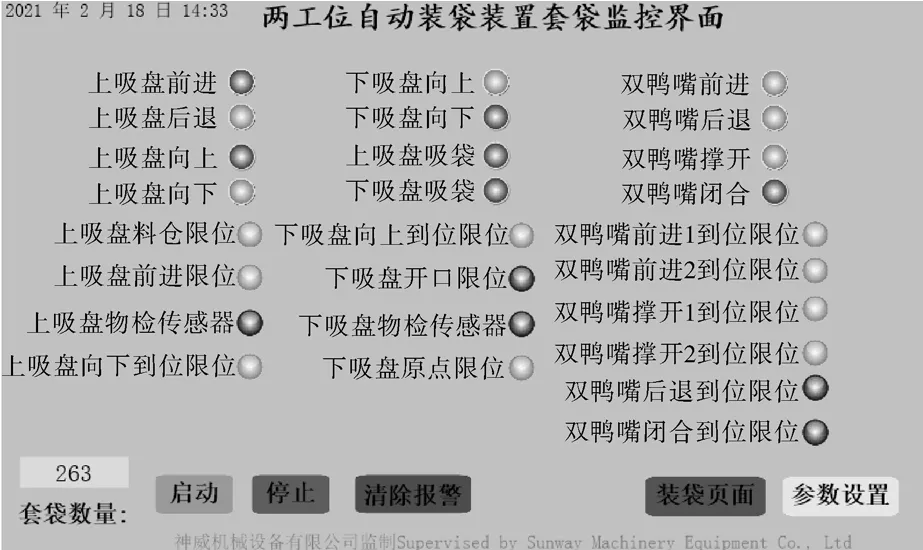
图8 套袋装置触摸屏监控界面Fig.8 Touch screen monitoring interface of bagging device
4 测试与结果分析
装置样机在河南省西峡县某食用菌菌棒料场进行性能测试,试验菌袋规格为直径18 cm,长度为58 cm。以木腐菌(香菇)菌棒生产中木屑混合料为原料进行测试,结果如表2所示。
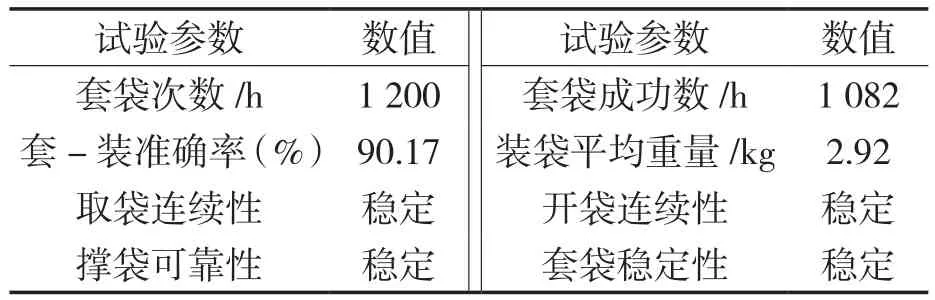
表2 套袋装置试验结果Tab.2 Test results of bagging device
5 结语
(1)本文设计的仿生自动套袋装置,已完成组装,在食用菌生产基地进行了相关测试,效果良好。
(2)仿生自动套袋装置将先前三工位装袋机改为两工位设计[11],降低设备复杂程度,使套袋和装袋操作同时进行,利用仿生手段实现套袋环节的自动化,提升食用菌装袋生产中套袋环节的自动化水平。
(3)性能测试表明,装置的平均生产率可以达到1 200袋/h,套-装袋准确率达90.17%,装袋后菌袋平均重量为2.92 kg,装袋质量稳定,差异性小。
综上所述,设计的菌棒仿生自动套袋装置,有效解决菌棒栽培套袋环节的自动化问题,促进食用菌产业发展,加快菌棒栽培生产的工厂化进程。
猜你喜欢
Asian Herpetological Research(2023年4期)2024-01-02 06:49:24
中国野生植物资源(2023年9期)2023-10-20 09:11:32
河北农机(2021年11期)2021-11-29 13:16:20
食用菌(2020年2期)2020-12-22 22:19:42
中国食用菌(2020年9期)2020-11-11 04:55:40
孩子·小学版(2019年11期)2019-09-10 09:33:39
今日农业(2018年5期)2018-03-24 05:53:12
农家之友(2018年4期)2018-01-30 17:47:26
农家科技中旬版(2016年12期)2016-04-16 03:41:27
食药用菌(2016年6期)2016-03-01 03:24:28
