
轻便型枣夹花生机的设计与试验
2022-11-09 11:36郜海超韩海敏陈会涛
包装与食品机械 2022年5期
郜海超,韩海敏,陈会涛
(1.河南应用技术职业学院 机电工程学院,郑州 450042;2.河南理工大学 机械与动力工程学院,河南焦作 454010)
0 引言
红枣是中国特有农产品,在食用与医用都有巨大应用市场,初加工和深加工是当前红枣产业发展的主体[1]。我国花生产量巨大,是最受消费者欢迎,销量最大的坚果食品[2]。枣夹花生可以提高口感,充分发挥枣和花生的营养价值。检索发现,目前对枣夹花生的操作主要由人工完成,存在效率低、劳动强度大和工艺简单等问题,而且对枣夹花生的研究较少,主要体现在大枣的去核,如郜海超等设计的便携型小型大枣去核机[3-5],设备小巧,操作方便,采用曲柄移动导杆机构简化推杆机构,并设计出样机,但是稳定性较差,曲柄移动导杆机构均为低副连接,定位精度不高;王华等设计的新型大枣去核机[6-7],采用三杆椭圆顺位机构,能精准定位,对如何上料未涉及,机构尺寸大,无法应用在轻便型设备中;文怀兴等[8]设计的大枣去核设备,推杆采用曲柄滑块机构,但在轻便型设备中,曲柄滑块机构容易出现干涉现象;张宝锋等[9]设计的大型大枣去核机,采用链式结构输送大枣,但链传动机构无法应用在轻便型设备中;张红等[10]设计的手持式大枣去核器,由人工定位大枣,借助按压弹簧定位夹紧大枣,通过压板去核,实现了轻便化要求,但自动化程度低、效率差。
本文提出轻便型枣夹花生机的设计方案,推杆采用空间曲柄滑块结构,上料采用三轴自定心机构,运动控制、状态监控采用单片机控制系统,能满足上料、去核和枣夹花生等工艺要求,结构紧凑,为后续设计轻便型设备提供参考依据。
1 轻便型枣夹花生机的总体方案设计
1.1 结构与工作原理
轻便型枣夹花生机(以下简称枣夹花生机)的主要功能是大枣和花生自动上料、自动去核、自动枣夹花生、自动推出成品,并把成品与枣核分区域存放。如图1所示,枣夹花生机主要包括三轴自定心上料机构、去核机构和枣夹花生机构等,其中推杆(空间曲柄滑块机构)主要应用在去核机构、枣夹花生机构和推成品机构中。
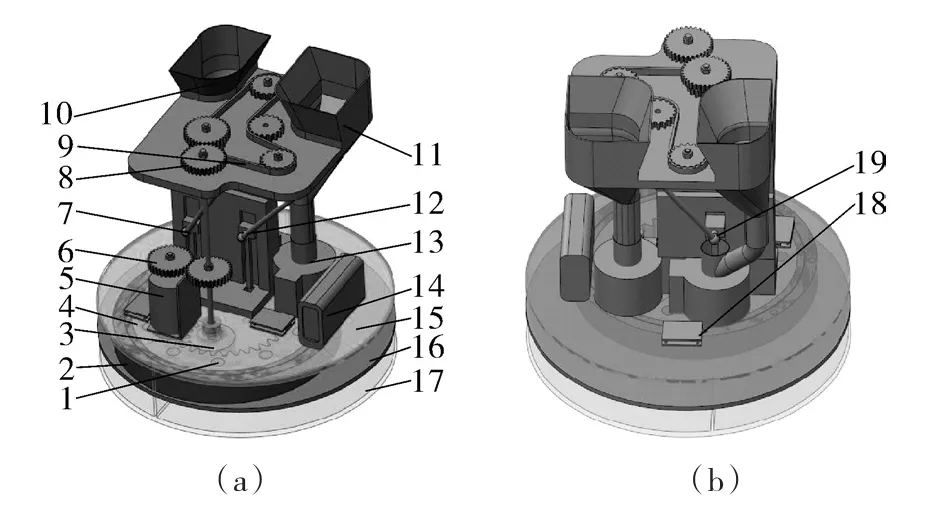
图1 枣夹花生机内部结构图Fig.1 Diagram of internal structure of the Jujube-clampingpeanuts machine
实施方案:大枣上料、花生上料和主传动分别采用3个不同电机,大枣和花生分别盛放在不同的料斗中,定位模套一共10个工位,套在内齿分度齿轮10个工位孔中,不完全齿轮与内齿分度齿轮的传动比为3:8。通过不完全齿轮带动内齿分度圆盘间歇转动,实现上料与加工不停机。
实施过程:三轴自定心上料机构把大枣定位在定位模套中,大枣精准定位上料。主传动电机通过驱动齿轮驱动不完全齿轮旋转96°,内齿分度齿轮旋转36°(旋转1个工位),此时,去核机构、枣夹花生机构和推成品机构中推杆的冲头在支撑板上方,实现切换工位。不完全齿轮继续旋转264°,内齿分度齿轮定位停止旋转,而推杆通过传动齿轮和同步带等进行同速转动,推杆头部的冲头从支撑板上方冲向定位模套,完成去核、枣夹花生和推成品工艺操作,形成1次冲程循环。
1.2 控制方案设计
枣夹花生机系统控制如图2所示。采用基于AT89C51单片机的控制系统[11],主要有稳压电路、电机控制电路、AT89C51单片机和传感器检测反馈电路等。设置启动键,通过霍尔传感器检测系统装置是否在初始位置,设置力和位置传感器检测大枣上料、去核、花生上料和推成品等工序工况。
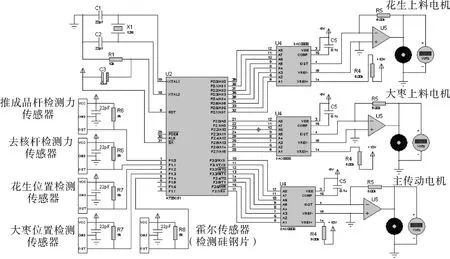
图2 枣夹花生机系统控制图Fig.2 Control system diagram of the Jujube-clamping-peanuts machine
1.3 主要设计参数
2 主要部件设计
2.1 大枣定位装置
大枣个体间尺寸差异造成的定位困难是阻碍去核工艺的主要原因[12],制定大枣定位零部件参数主要依据是大枣纵径和横径差异。大枣外形尺寸:纵径 27~48 mm,横径 20~43 mm;内核尺寸:纵径 14.6~33 mm,横径 3.6~10 mm[13]。设计定位模套如图 3(a)所示,采用免洗弹性材料制成[14],外轮廓为圆柱形,内轮廓为倒锥形,便于上料和定位。内齿分度齿轮如图3(b)所示,工位孔与定位模套外轮廓为过渡配合,一周10个工位孔,可进行多工位多工序同步操作,提高加工效率。
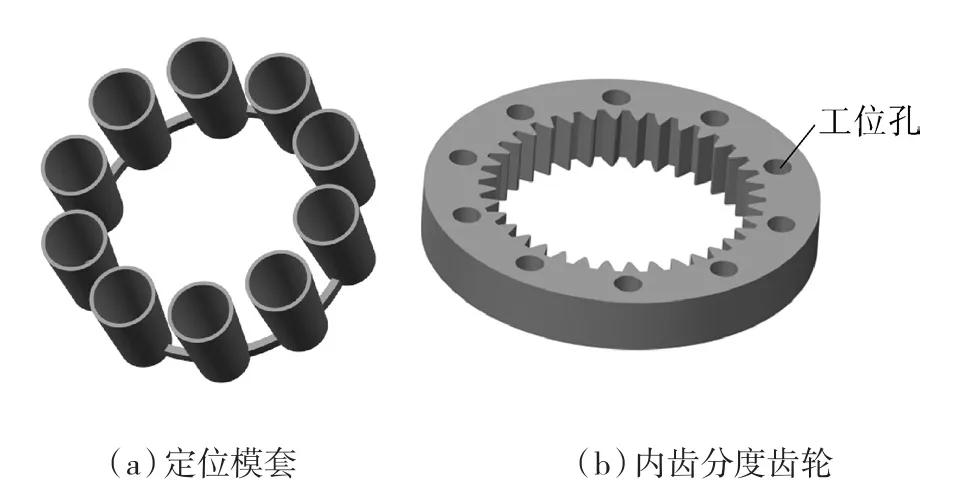
图3 大枣定位机构三维图Fig.3 The 3-D solid model of the jujube positioning mechanism
2.2 花生上料定位机构
根据工艺要求进行花生上料定位,花生三轴自定心上料机构主要包括驱动电机、齿轮传动机构、定心筒与螺旋定心柔性辊、撑口装置等零部件,如图4所示。利用三旋转轴关于圆心等距,夹角120°自定心原理,设计3个同速转动带螺旋导向槽的螺旋定心柔性辊,柔性材质使传送物料时柔性辊与花生形成较大摩擦力,从而实现把花生自定心去核后向大枣内腔送料。撑口装置主要用来撑开去核后的大枣内腔,避免送料时,因花生与枣肉摩擦而出现褶皱、变形和无法装填等现象。
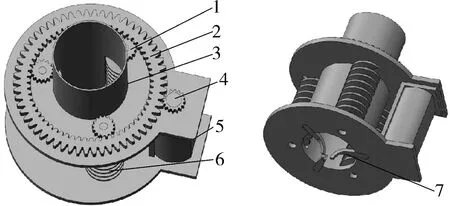
图4 花生上料定位机构三维图Fig.4 The 3-D solid model of the peanut feeding and positioning mechanism
2.3 推杆机构设计
推杆常采用曲柄滑块机构、曲柄移动导杆机构和空间曲柄滑块机构等。其中曲柄滑块机构在轻便型设备中易出现干涉,曲柄移动导杆机构因传动副均为低副,传动精度不高,故枣夹花生机采用空间曲柄滑块机构。
2.3.1 运动模型分析
推杆机构三维模型和数学模型如图5所示,推杆可简化为空间曲柄滑块机构,曲柄L1在XOZ平面绕Y轴旋转,连杆长度为L2,滑块在ZOY平面沿Y轴移动。
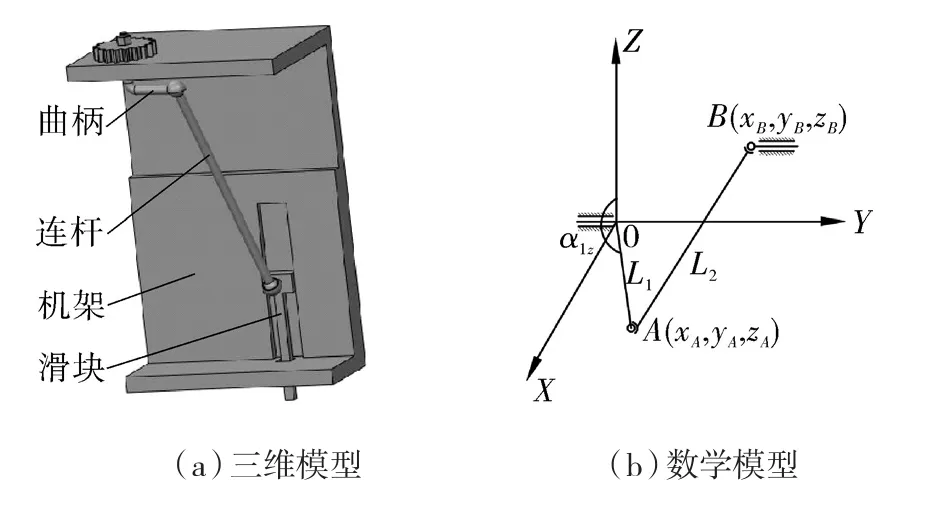
图5 推杆机构三维模型图及数学模型图Fig.5 The 3-D solid model and the diagram of mathematical model of the pushing rod device
建立数学模型如图5(b)所示,假定α1z为L1与Z轴夹角,α2为L2的空间角,A点坐标为(xA,yA,zA),B 点坐标为(xB,yB,zB),建立矢量方程如式(1):

将式(1)各矢量向坐标平面投影得:
整理得:

2.3.2 仿真分析
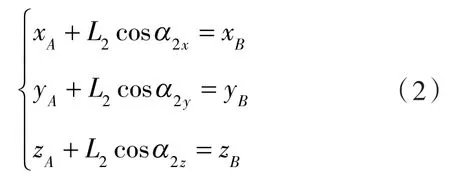
对数学模型进行仿真分析,结果如图6所示。根据枣夹花生机尺寸要求,曲柄半径50 mm,连杆长度100 mm,滑块Z值40 mm,假定曲柄初始角度180°,旋转角速度5 rad/s。
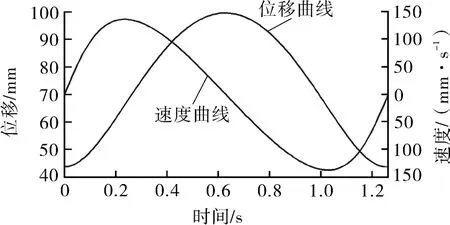
图6 推杆机构中滑块运动曲线图Fig.6 The movement curve of the slider in the pushing rod device
滑块速度和位移均按照正弦运动规律变化,没有出现速度和位移突变现象,符合推杆应用要求。t=0~0.25 s时,花生通过定量拨叉上料完毕,推杆逐渐推出,到达三轴自定心柔性辊处,速度达到最大;t=0.25~0.62 s时,推杆推着花生通过三轴自定心柔性辊,位移逐渐增大,速度逐渐下降,花生接触撑口装置,速度降到0,接着逐渐打开撑口装置,花生送进去核大枣内腔,位移达到最大,反向速度逐渐增大;t=0.62~1.04 s,推杆返回,撑口装置复位,为减少推杆与螺旋定心柔性辊的摩擦力,推杆反向速度逐渐增大,直到完全脱离,推杆反向速度达到最大;t=1.04~1.25 s,速度逐渐下降,推杆复位,完成1次枣夹花生工艺过程。
2.3.3 运动学分析
利用Adams建立枣夹花生机模型进行运动学分析。如图7(a)所示,设定曲柄起始角为π,滑块推杆、连杆和曲柄均采用尼龙材质,分析结果如图7(b)所示。
图7 推杆机构中滑块位移和速度曲线Fig.7 The displacement and velocity diagram of the slider in the pushing rod device
滑块运动分析结果与仿真结果一致,验证数学模型正确合理,因此枣夹花生机推杆可以采用空间曲柄滑块机构。
3 枣夹花生样机试验
为验证枣夹花生机大枣上料和枣夹花生性能,采用枣夹花生实验样机分别进行2项试验,试验对象采用新疆灰枣(外形规格一致,品相一致)。试验1:测试5组,每组60颗,测试三轴自定心柔性辊上料大枣定心性能。试验2:取60颗已经去核成功大枣,120颗山东莱西产花生(外形规格一致,品相一致),1颗大枣装填2颗花生,测试推杆作用下花生上料性能和枣夹花生性能。2个试验均在同一测试条件下进行,实验样机见图8。

图8 枣夹花生实验样机Fig.8 Prototype for the simulation test of the jujube-clamping-peanuts machine
表1试验数据表明,5组平均上料数为56个,平均定位成功率约为94%,比采用上料辊有提升,但是成功率还是不高。三轴自定心柔性辊可以准确把大枣输送到定位模套中,但因柔性辊送枣驱动力不足,容易造成大枣送料到位不足,实际应用中可考虑改进柔性辊材质。
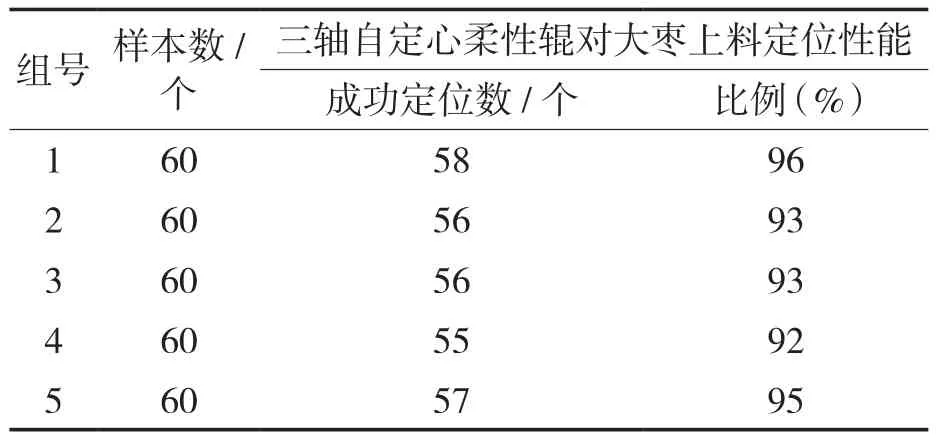
表1 枣夹花生机试验数据(一)Tab.1 Data of the simulation experiment using the jujube-clamping-peanuts machine(1)
表2试验数据表明,推杆作用下花生的定心上料成功率平均96%,能够满足使用要求,但是枣夹花生成功率为92%,相对较低。分析原因,已经炒熟的花生,受力容易分离成两瓣,造成无法装填,影响成品率,后续研究可考虑在花生瓣中添加蜂蜜,既能防止花生分离又能提高口感。
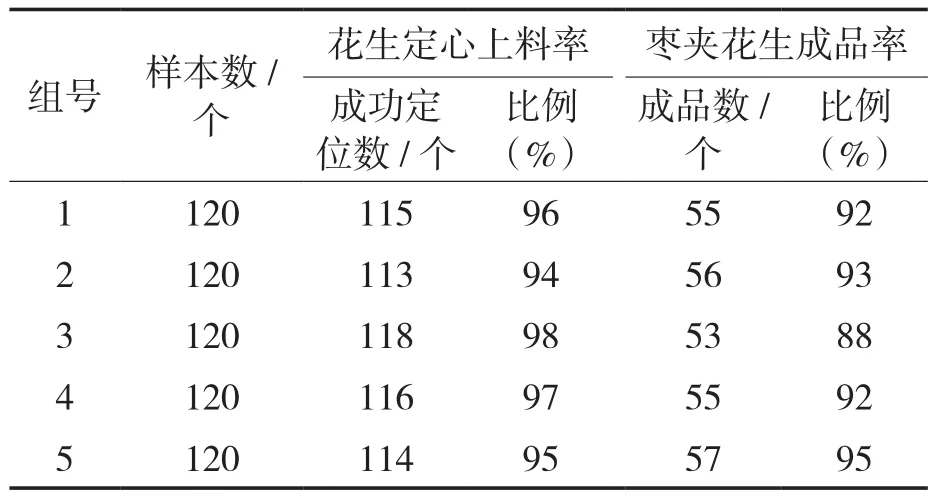
表2 枣夹花生机试验数据(二)Tab.2 Data of the simulation experiment using the jujube-clamping-peanuts machine(2)
4 结语
根据枣夹花生工艺设计一种基于单片机控制的轻便型枣夹花生机,每1.25 s可完成1次枣夹花生操作。枣夹花生机外形尺寸为280×300 mm,设计轻便,生产效率高。采用空间曲柄滑块机构传动、三轴自定心柔性辊上料,解决小空间传动机构干涉和上料成功率不高问题。样机试验表明,设备性能稳定,上料成功率94%以上,满足大枣和花生上料要求。可在类似需求的装备中推广应用。
猜你喜欢
宝钢技术(2022年4期)2022-12-23
机械管理开发(2022年5期)2022-07-07
设备管理与维修(2019年22期)2019-12-19
中学语文(2019年33期)2019-12-03
制造技术与机床(2018年12期)2018-12-23
内蒙古教育·综合版(2017年5期)2017-05-17
中国核电(2017年1期)2017-05-17
中南大学学报(自然科学版)(2016年2期)2017-01-19
铁道通信信号(2016年10期)2016-06-01
制造技术与机床(2015年10期)2015-04-09
