
采用阵列信号技术的ADS-B系统抗干扰研究*
2022-11-09 07:27李武旭李君惠
舰船电子工程 2022年8期
李武旭 李君惠 李 宏
(四川九洲空管科技有限责任公司 绵阳 621000)
1 引言
广播式自动相关监视(Automatic Dependent Surveillance-Broadcast,ADS-B)是一种基于卫星定位技术和空地数据链技术的飞机航行监视系统。在实际运行环境中,系统面对复杂的电磁环境,常会遭遇一些威胁,例如:欺骗干扰,转发式欺骗干扰,信号交织[1],ADS-B系统采用全向天线或大角度定向天线接收,当空域飞行繁忙时,信号时域交织越发严重[2]。
通过对ADS-B技术的特点的分析,可以得到ADS-B系统的缺陷以及针对这些缺陷的攻击手段,见表1。
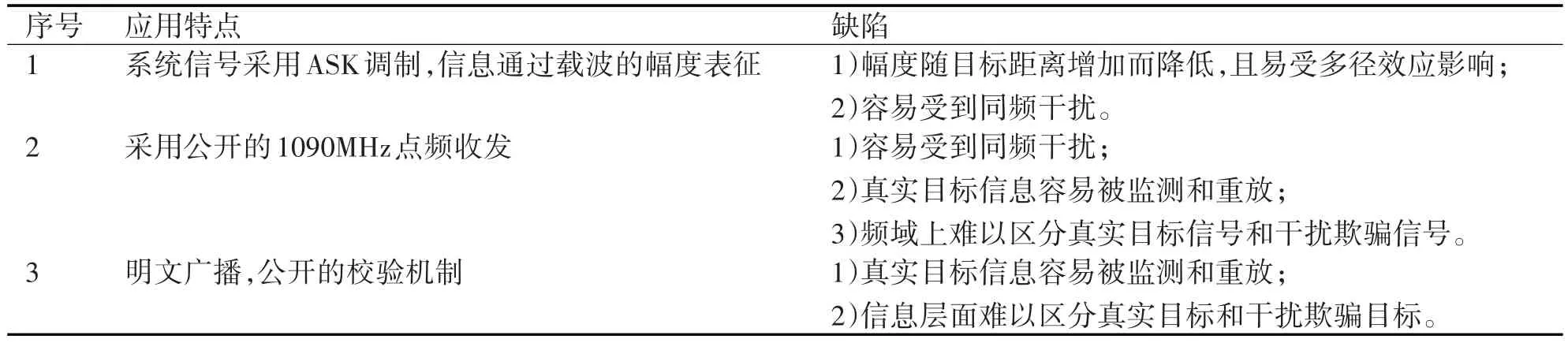
表1 ADS-B系统的安全性缺陷
根据ADS-B系统存在的缺陷,ADS-B系统面临的威胁形式可以概括为交织干扰和欺骗攻击两大类型。
1)交织干扰
由于ADS-B与空管A/C/S模式应答信号共用1090MHz工作频段,采用相同的ASK调制方式,但工作方式不同(ADS-B自动广播方式,而空管A/C/S模式为询问应答方式)。因此,这些信号在空间传输过程中,容易受到多径效应影响或与同频信号发生碰撞,产生交织干扰。由于工作信道的容量有限,随着飞行器数量的增加,空间中ADS-B信号以及空管A/C/S模式应答信号的密度也会相应增大,则这些信号发生碰撞的概率也会增大[9,12]。
ADS-B解码算法是基于幅度信息来提取数据[16]。在这种解码机制下,当干扰信号与被干扰目标信号强度差距较大(大于3dB)时,能够在一定程度上解交织并正确解码报文;如果干扰信号与目标信号强度差距较小(小于3dB)时,解码算法将会产生大量的低置信度数据位,超出纠错算法能力,导致解码失败[1]。
2)欺骗攻击
利用ADS-B干扰源产生符合协议规定格式的ADS-B报文,广播虚假的位置信息。地面站将虚假信息接收并解析后,将其作为正常数据和空中真实目标同时输出到用户终端,导致管制员无法获取空中真实空域态势;进一步,如果对仿真目标的航迹进行针对性设计,与真实目标的航迹产生异常接近或者碰撞冲突,会在空管自动化系统上产生告警,导致管制员发出错误指令,扰乱正常的飞行秩序[9]。仿真目标欺骗攻击原理如图1所示。
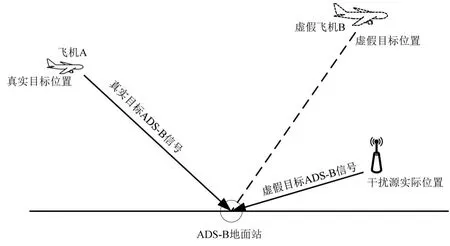
图1 仿真目标欺骗攻击原理示意图
本文研究采用阵列信号处理方法对ADS-B系统运行稳健性的提升,针对交织干扰和欺骗攻击两种类型的问题,给出解交织和方位一致性验证作为对应解决办法。对于交织干扰,干扰源来自于有限的站点,很难实现覆盖全方位的干扰攻击。常规的ADS-B地面站采用全向天线接收,没有天线接收方向选择能力,当交织严重时,会引起数据丢失,因此,通过引入阵列天线,将空域分波束覆盖,以减少信号交织的概率,当某个方位出现饱和干扰攻击时,仅仅影响该方位的空域信号接收能力,而其余方位的信号仍能正常接收工作。
仿真目标欺骗攻击存在干扰源发射的虚假目标报告位置(距离、方位以及俯仰角/高度)与干扰源位置不一致的特点。因此,地面站可以通过测量ADS-B信号发射源位置,与报告位置对比方法来鉴别目标的真伪,抵抗仿真目标欺骗攻击。
通过深入分析ADS-B技术体制的应用特点和各类ADS-B干扰欺骗攻击形式,充分考虑实际的应用需求,地面站采用的抗干扰防欺骗ADS-B技术手段见表2。

表2 抗干扰防欺骗ADS-B技术途径说明
2 系统设计
系统分为ADS-B天线、ADS-B接收机与ADS-B数据处理工作站共三大部分,如图2所示。
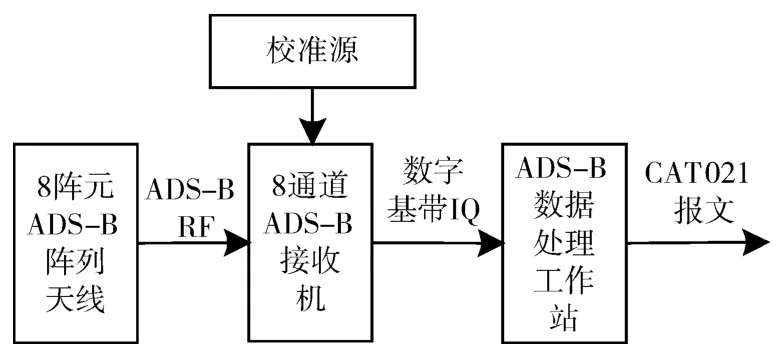
图2 系统示意图
ADS-B天线为8阵元的均匀线阵,用于接收空间中1090MHz的ADS-B射频信号。校准源为接收通道提供基准信号,用于通道校准参考。ADS-B接收机通过接收信道对8路射频信号进行超外差下变频处理,生成70MHz的中频模拟信号,然后采样,形成数字中频信号,对8路数字中频信号分别进行数字正交下变频和通道幅相校准处理,产生幅相一致的数字基带IQ信号,再通过高速总线送到ADS-B数据处理工作站;在ADS-B数据处理工作站中,信号处理过程包含:非相干信号检测、ADS-B信源方位估计、空域滤波、ADS-B解调译码、航迹跟踪和目标方位一致性验证,流程如图3所示。
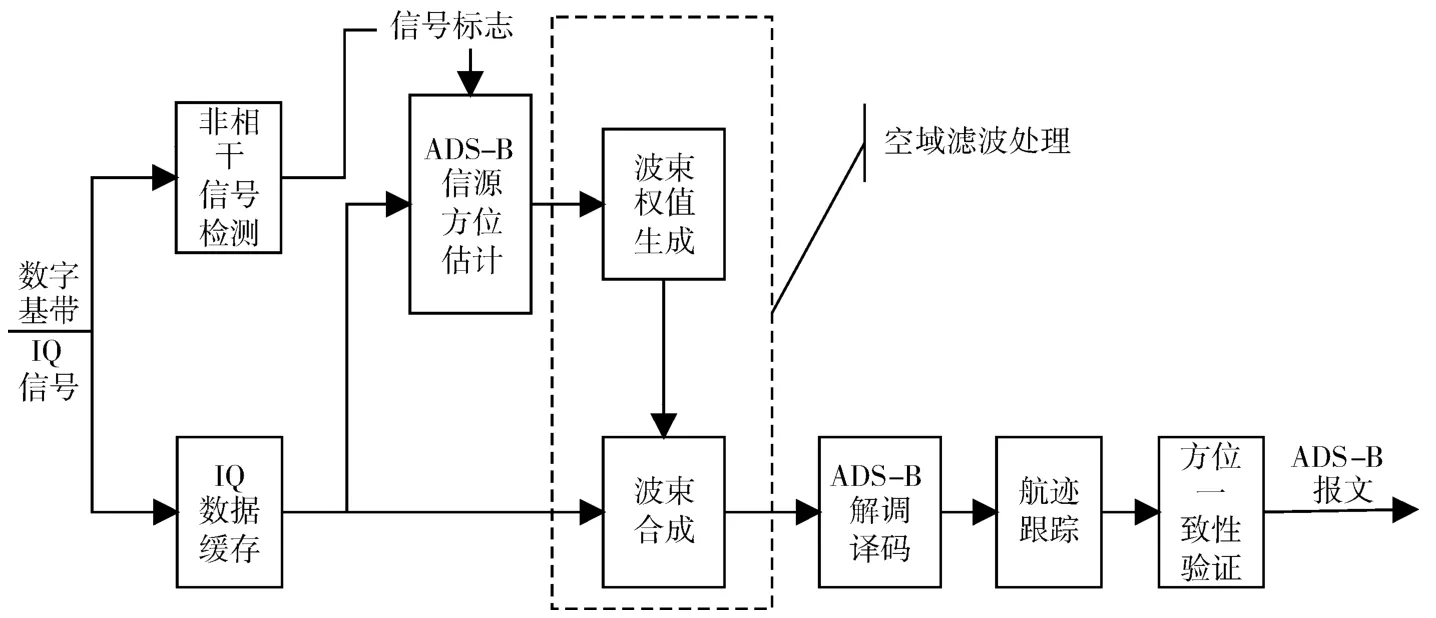
图3 ADS-B抗干扰处理流程
1)非相干信号检测
非相干信号检测处理依据信号能量,从基带IQ信号中检测出能量足够高的有效信号[6]。信号能量的检测原理基于信号能量与幅度成正比关系,而信号幅度等于信号IQ分量的平方和。首先以滑窗方式对每一路基带IQ信号进行能量检测,然后对所有通道的能量进行求和,再进行平滑处理,以减弱噪声对能量估计值的影响,最后采用恒虚警(CFAR)处理方法检测出持续时间符合ADS-B报文长度[16]要求的有效信号,如图4所示。

图4 非相干信号检测处理流程示意图
2)ADS-B信源方位估计
ADS-B信源方位估计采用多重信号分类(MUSIC)算法[11]检测信号中的ADS-B信号来波方位(DOA),首先利用非相干信号检测处理有效信号的基带IQ数据,进行自相关矩阵估计;然后通过相关矩阵特征分解,获得相关矩阵的特征值及其与之一一对应的特征向量[13];利用文献[15]中所述方法估计信源个数,并将特征向量分成信号子空间和噪声子空间;最后利用噪声子空间构建MUSIC空间功率谱PMUSIC(θ)估计函数[6],即:
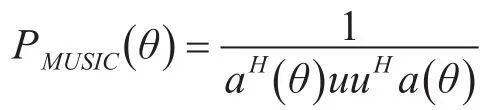
其中,a(θ)表示阵列导向向量,θ表示方位角,u为噪声子空间。在天线空域覆盖范围内,搜索MUSIC功率谱PMUSIC(θ)的峰值,其峰值对应的方位角θ即为信源方位。
3)空域滤波处理
空域滤波处理包含波束权值生成和波束合成两个过程[3]。
首先,通过线性约束最小方差准则算法(LCMV)[14]生成有特定指向的波束权值ω[c] ;然后,通过波束合成增强期望方位目标信号,抑制其余方位的信号,每一路天线的基带IQ信号(如图5中xc[n],c=0,1…N-1)分别与其对应的波束权值(见图5中ω[c])进行相乘,然后将它们全部累加即得干扰分离的基带IQ信号(即图中s[n])。
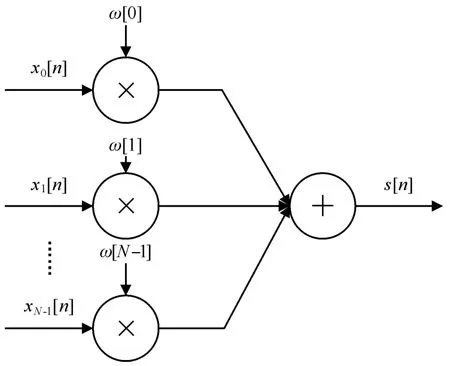
图5 波束合成原理示意图
4)ADS-B解调译码
ADS-B的解调译码处理过程从干扰分离的基带IQ信号中解调,获得基带包络,根据文献[16]所定义,检测ADS-B报文前导头,确定ADS-B报文数据起始时刻,并进行数据译码和CRC校验,产生112位的ADS-B原始报文数据,并记录数据信源方位。
5)航迹跟踪,根据文献[16]对ADS-B原始报文进行航迹跟踪,形成完整ADS-B航迹信息。
6)目标方位一致性验证,对ADS-B航迹报文中的方位,与目标信源方位进行一致性对比,当两者不一致,可判定该目标是虚假的。
3 幅相误差对信源方位估计的影响分析
实际工程中,多个阵元接收通道之间必然存在增益和相位的偏差。通道增益误差的存在不会影响MUSIC功率谱的峰谱位置(θ),但整体上会降低峰值,并且谱峰宽度变宽,降低方位估计的分辨力;通道间相位差会使计算出的峰谱位置(θ)产生偏差[13]。因此,系统通道间的增益一致性与相位一致性,决定了系统的分辨力。
系统多通道经校准后增益误差可控制在1dB之内,相位误差在5°之内,设定通道间增益误差±1dB,相位误差±5°之内随机分布,对信源方位间隔5°~ 15°,信噪比0~ 20dB范围进100次行仿真,统计峰谱位置(θ)与设定信源位置差值的均方根值(RSME),仿真结果如图6所示。从仿真结果可以看出,信源夹角大于10°时,在全范围均可估算出信源方位,RMSE约0.5°;信源夹角小于9°,SNR小于5dB,信源方位的估计误差开始急剧上升。
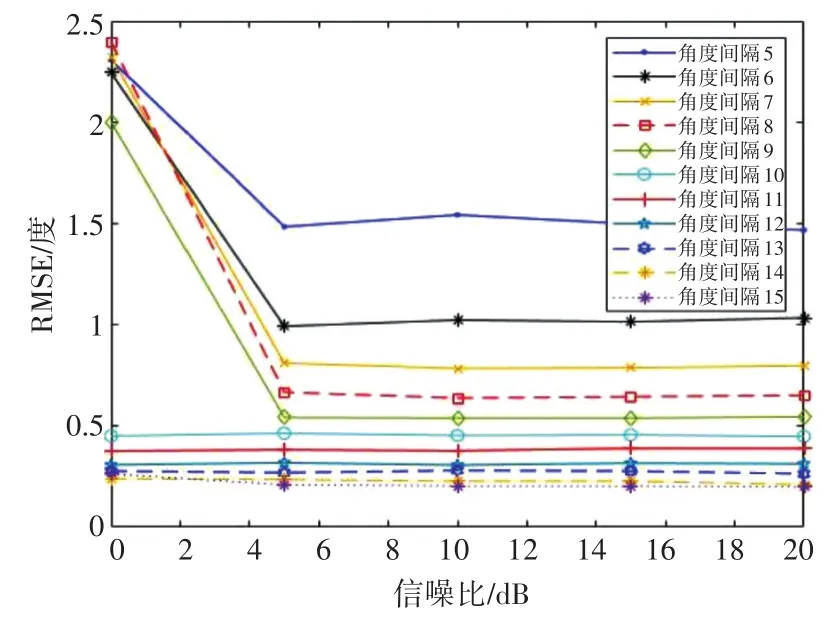
图6 不同间隔角度下信噪比对方位估计误差的影响
文献[16]标准规定ADS-B系统解码最低信噪比4dB,基于上述条件,设定信源信噪比为4dB,两个信号角度差从5°开始到10°,步进1°,再次进行仿真,以测算信源分辨力,仿真结果如图7所示。仿真结果说明,在该条件下,信源间隔约6°以上时,该算法可估算出两个信源,实现概率95%以上。
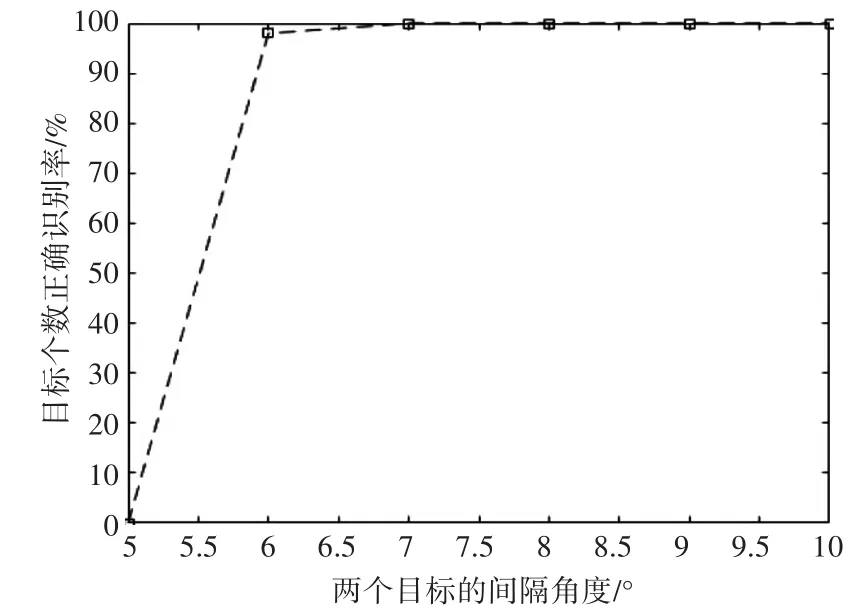
图7 幅相误差下信源夹角对信源识别率影响
4 功能仿真
通过全过程功能仿真,验证所提出的方法对信号存在干扰时的分离提取功能。
系统ADS-B阵列天线由8个阵元组成的均匀线阵(Uniform Linear Array,ULA),阵元的间距为半波长,模型如图8所示。
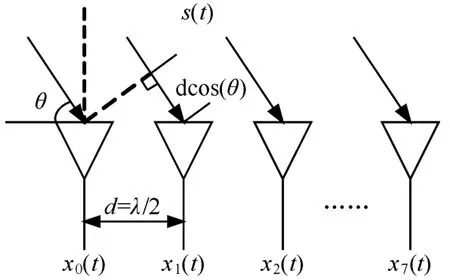
图8 线阵天线模型
实际工程中考虑到噪声,阵列接收信号模型应该为
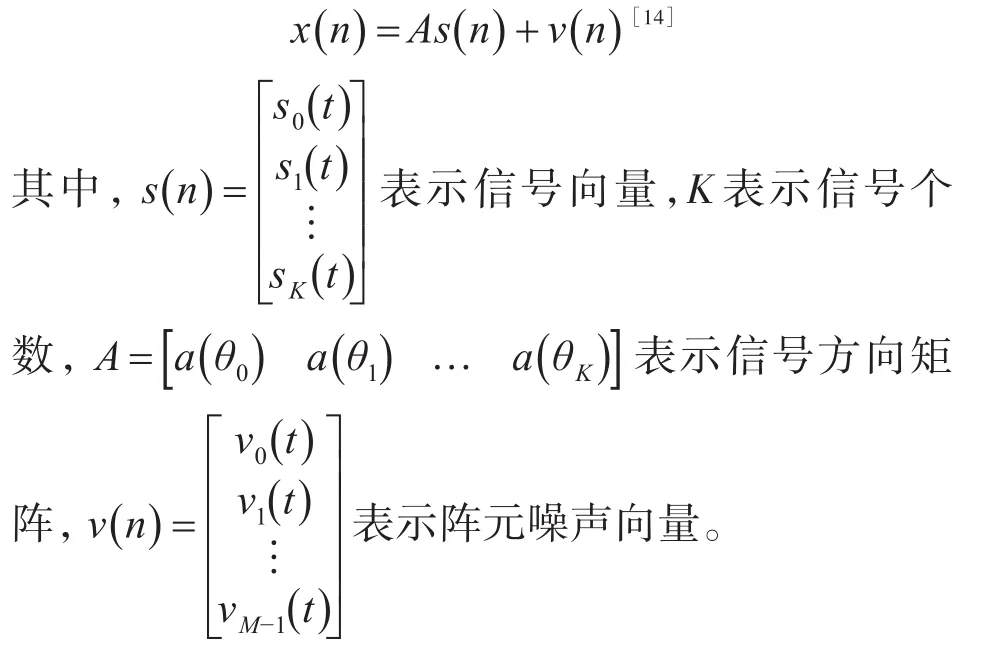
在仿真场景中依据模型,设置高斯噪声,连续波干扰信号和两个不同目标的ADS-B信号,连续波干扰与信号的幅度相同,连续波干扰的信源方位为90°(天线法线方向),目标1 ADS-B信号的信源方位为100°,目标2 ADS-B信号的信源方位为106°,时域波形如图9所示,该场景模拟了具有ADS-B信号交织干扰和连续波干扰的信号输入,同时还可验证算法的多目标处理能力。
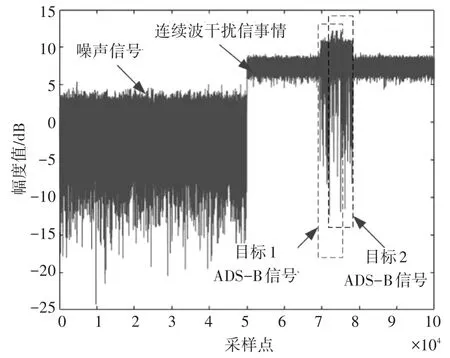
图9 天线接收信号基带波形
通过ADS-B信源方位估计处理结果如图10(a)所示,PMUSIC(θ)存在三个尖峰,即存在3个信源,对应方位角分别为90.1°、100.3°和105.9°,MUSIC测向结果与预设相符。
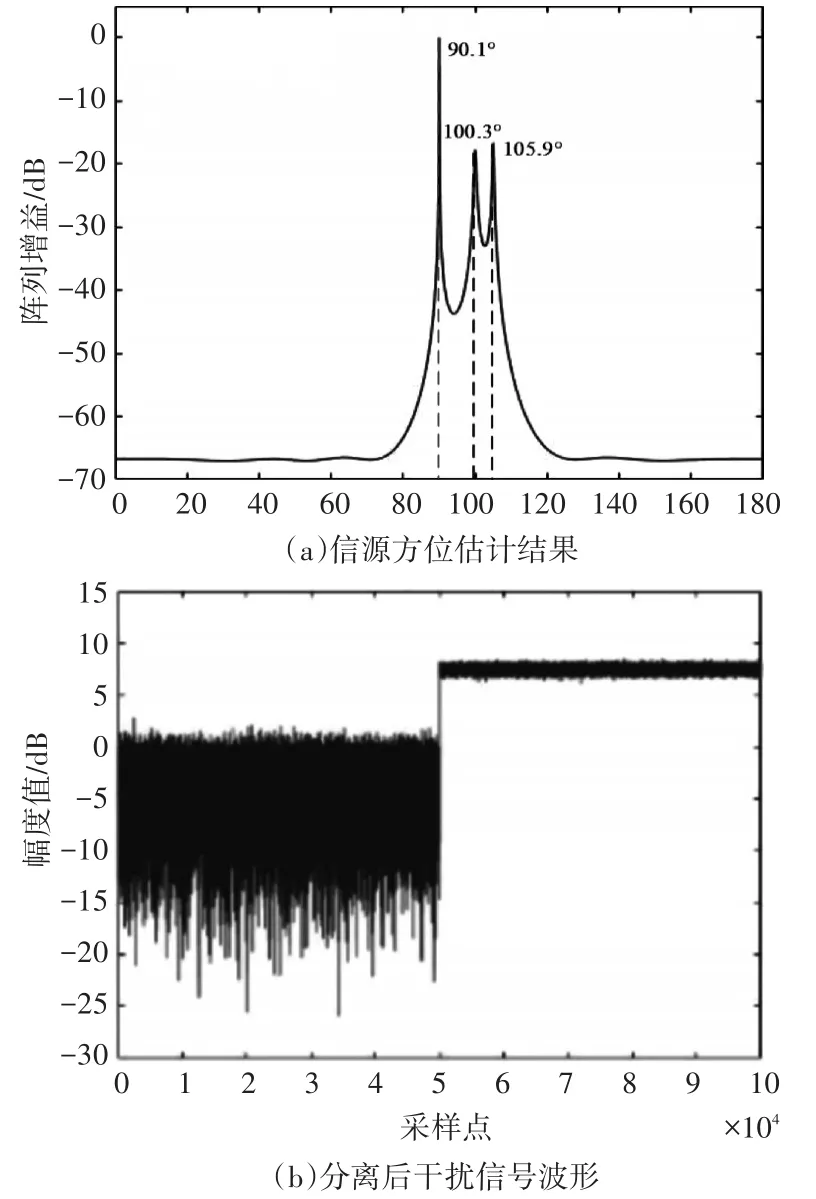
图10 信源方位估计结果和分离后干扰信号波形
在获得信源数量和方位信息后,用LCMV算法,分别求出每个目标对应的波束合成权向量,并依次对基带信号进行波束合成得到对应方位的合成信号。预设的三个信号经空域滤波后合成信号波形分别如图10(b)所示。空域滤波分离后的信号,按照正常的ADS-B译码过程进行处理,即可解析出ADS-B原始报文。
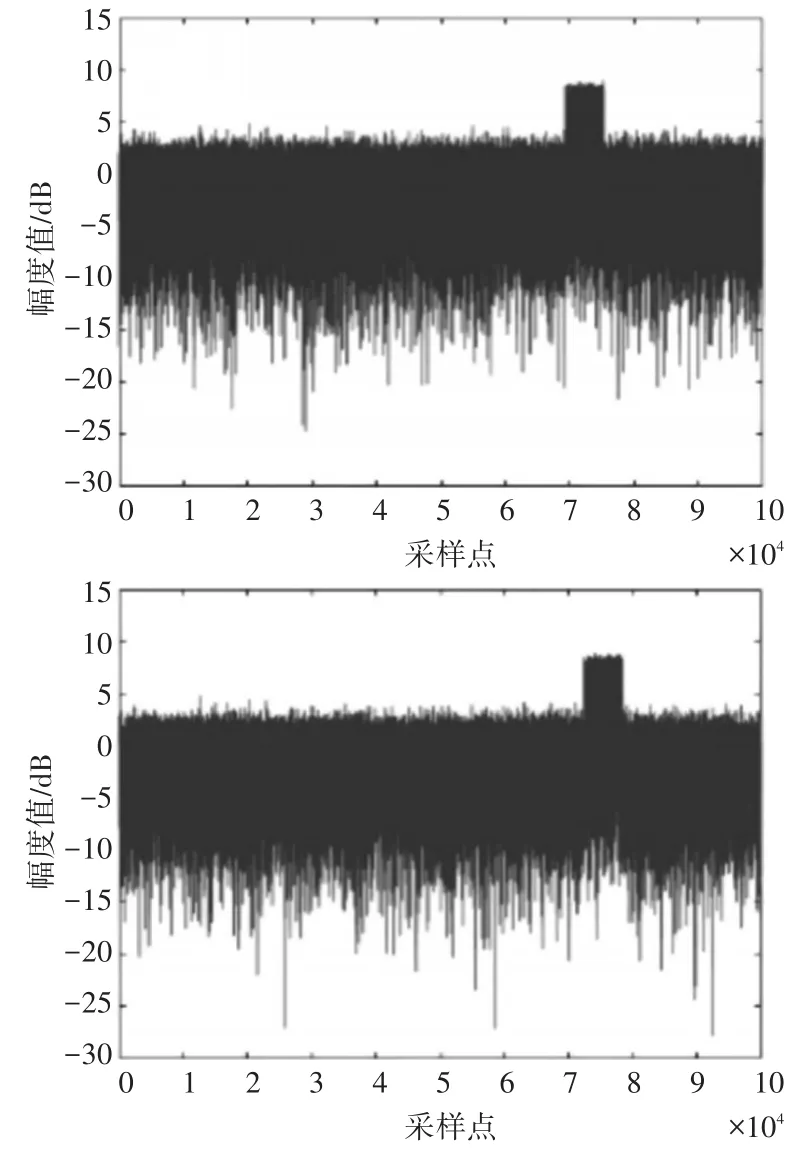
图11 空域滤波分离后目标1、2信号波形
5 实验验证
根据系统方案设计以下实际场景,进行验证,如图12所示。
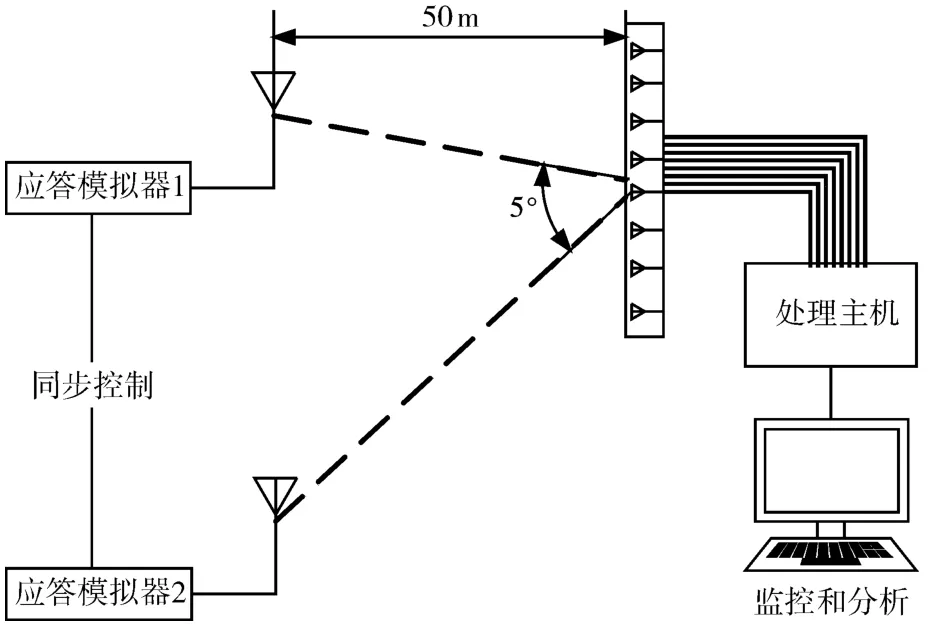
图12 实验场景
两个模拟器模拟产生有交织的信号,处理主机对阵列信号进行接收、采样和处理,监控终端对信号进行分析和展示。设置两个应答天线距ADS-B阵列天线约50m,平行于接收天线拉开距离,保持不小于6°的夹角,分别对两台模拟器进行编程,模拟两个ADS-B目标,通过应答天线发射,两台模拟器通过信号线同步触发,以保证所发射信号在时域上同步,且有交织。交织信号,经阵列天线和接收通道处理,生成的8路ADS-B数字IQ信号,解调后的幅度——时域波形如图13所示,两个目标信号波形发生了交织,基于该信号,不能准确地提取ADS-B信号的前导头,也不能正确地解析波形中的数据。
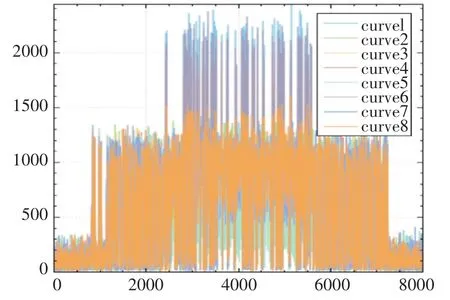
图13 天线接收的ADS-B信号时域波形
该信号经ADS-B信源方位估计和空域滤波处理后,提取出两个目标信号,如图14所示,交织的信号波形被有效分离,对比波束合成前后噪底水平,噪底降低,信噪比提升,解调出的信号中脉冲,分别与两个应答模拟器的发射脉冲相符;对分离后的信号波形继续进行ADS-B译码处理,能够准确地提取ADS-B前导头,并且解析出的数据与模拟器的设定一致。
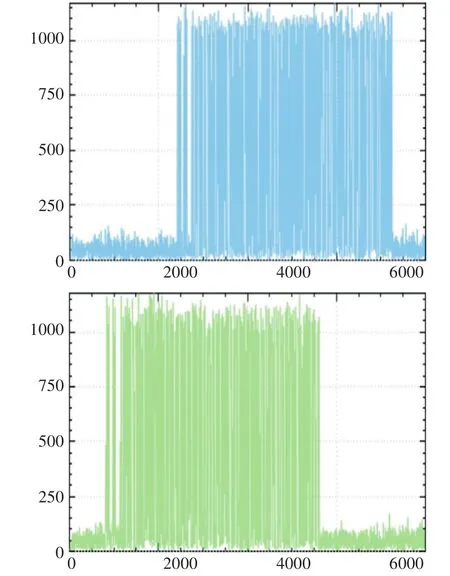
图14 空域解交织后提取的目标信号波形
实验结果表明,ADS-B系统采用多通道线阵天线接收,利用MUSIC算法进行信源方向估计,能够区分方位相差6°以上的多个目标,利用数字波束合成实现ADS-B信号在交织干扰条件下的多目标信号分离和干扰方位的陷零抑制,可实现对交织信号的正确接收、解析,抑制交织干扰、欺骗攻击,提升ADS-B系统在实际电磁环境中运行的稳健性。
6 结语
本文提出了基于阵列信号处理的方法,阐述了ADS-B信号信源方位估计、数字波束形成,空域滤波的方法,分析了通道幅相误差对分辨力的影响,并进行了实验验证,该方法应用于ADS-B系统中,系统可在一定的交织干扰和欺骗攻击情况下,仍然能够正常稳定地工作,提升ADS-B系统在实际电磁环境中的稳健性能。该方法的局限性在于:1)需要采用阵列天线和阵列接收,增加了系统的设备复杂度;2)信号相关矩阵估计、相关矩阵特征分解、噪声空间估计和信源方位搜索处理过程,均要用到大量的矩阵运算,需采用具有高性能并行计算能力的GPU才能满足系统的实时性处理要求。阵列信号处理作为信号处理的一个重要分支,在通信、雷达、声纳、地震勘探和射电天文等领域内获得了广泛应用,为系统带来了显著的效能提升,其理论在工程应用还有巨大的价值空间,值得学习和挖掘。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
美食(2022年2期)2022-04-19
科学与生活(2021年17期)2021-11-10
移动通信(2020年9期)2020-11-06
现代电子技术(2020年3期)2020-08-04
VOGUE服饰与美容(2019年10期)2019-12-02
记者摇篮(2019年7期)2019-09-17
女报(2019年3期)2019-09-10
科教导刊·电子版(2018年10期)2018-06-11
中国市场(2016年1期)2016-03-11
