
矢量阵被动测向算法研究*
2022-11-09 07:27孙在东
舰船电子工程 2022年8期
祝 捷 孙在东
(1.海装沈阳局 沈阳 110003)(2.沈阳辽海装备有限责任公司 沈阳 110003)
1 引言
随着社会的发展和科技的进步,世界各国对于海洋权益的争夺也愈演愈烈。对于在海上作战的装备也愈发先进。而水下航行器则是诸多装备中非常重要的一种。水下航行器不仅隐蔽性好,并且机动灵活,还拥有着很强的突击能力。因此各国海军对水下航行器的研究与发展也是高度重视[1]。
水下航行器在水下作战时,对于水下信息的获取大部分都是来自于各种声纳。将声纳按照工作方式分又可分为主动声纳和被动声纳。主动声纳很容易将水下航行器自身的位置暴露,所以水下航行器一般情况下在水下航行时都是被动声纳在工作。舷侧阵作为典型的被动声纳,一直是水下航行器所装备的声纳阵中非常重要的一部分。与拖曳阵不同,舷侧阵一般沿水下航行器的两侧贴装,所以舷侧阵不会破坏水下航行器的整个流线型,并且拥有一定的基阵尺寸[2]。然而水下航行器在行进过程中,本身存在一定的自噪声。当其噪声强度大于目标的辐射强度,也就是在对于弱目标的探测时,自噪声的影响将更为重要。所以能否减弱或抵消自噪声的影响,将直接影响到弱目标检测的性能。
以往减弱自噪声影响的方法大都采用物理隔振,主要通过安装声障板来起到隔振的效果[3~5]。随着矢量水听器的发展,矢量处理算法也可以起到一定的抑制噪声效果。水下声波信号包含标量信息也含有矢量信息,传统的声压水听器只能接收到声压信号,而矢量水听器不仅能接收到声压信号还能接收到信号的振速信息。因此通过矢量算法,将矢量水听器自身接收到的声压和振速信号组合,即可形成一定的指向性,以此来达到抑制噪声的效果。另外由于矢量水听器具有更好的低频指向性以及振速的偶极子特性,矢量阵的阵增益也会比声压阵高出约为 3dB[6~12]。
2 矢量阵被动测向算法
2.1 矢量阵波束形成
只考虑二维的情况,假设窄带平面波传播到一有M个阵元的均匀直线阵窄带信号的方向为θk(k=1,2,...,K),阵列接收信号如图1所示。
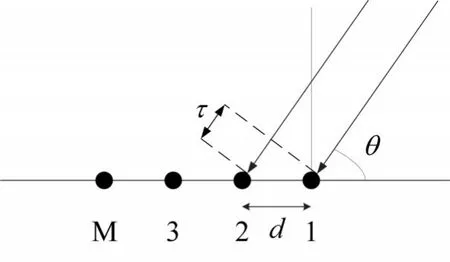
图1 均匀线阵
对于矢量阵,第i个矢量阵元的输出可表示为

干扰背景矢量ni(t)为

式中:np(t),nvx(t),nvy(t)是相互独立的,分别为声压和两个振速的干扰噪声。式(1)用矩阵表示为

式(4)表示声场中共有M个目标声源;符号⊗表示克罗内克积,又称直积。式(4)中的信号矢量为

式中:N为阵元总数;i为目标序号。
方向矢量为
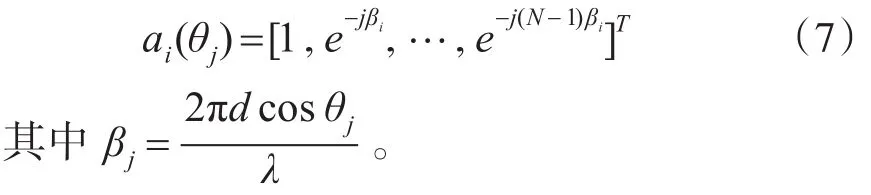
式中:d为阵元间距;θj为第j号目标对于基阵法线的方位角。
方向矩阵A为

这时可以将整个阵列的输出表示为

如果用向量的形式表示接收信号以及权值,则有

通过对每个阵元进行不同权值的加权,可以令在不同方向上形成一个主瓣,而加权向量可以表示为

从该加权向量的表达式可以看出,当目标信号只是一个来自θ方向的信号时,当方向向量a(θ)为每个阵元的权值时。则有

常规波束形成算法的空间谱为

其中,矩阵R为阵列输出x(t)的协方差矩阵,即R=E[x(t)xH(t)]。
2.2 矢量水听器组合指向性
矢量水听器不仅能够接收到声压信号,还能接收到信号的振速信息。声压水听器的指向性是全向的,而振速的指向性却不是全向的。考虑二维情况,通过对两个振速的组合可以组合振速Vc和Vs。假设引导方向为ψ,Vc和Vs的表达式如下。

将式(15)、(16)化简为

再将声压和振速组合可得

其指向性图如图2和图3所示。

图2 P+Vc指向性
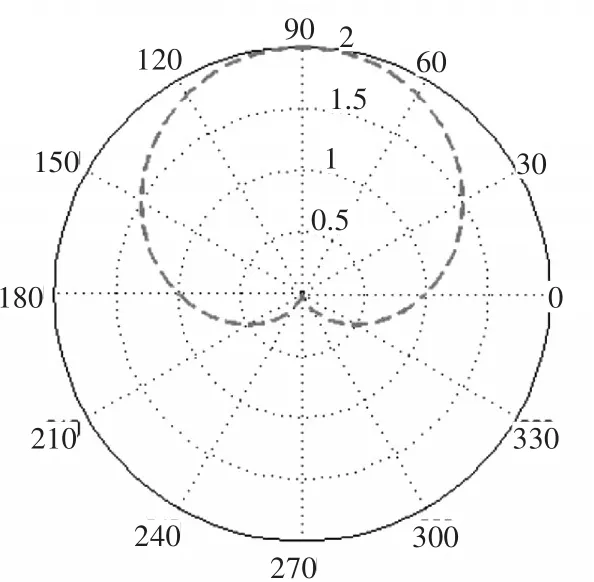
图3 P+Vs指向性
从其指向性可以看出,这种组合方式是具有单边指向性的。因此可以通过该种方式来对某些固定方向的强干扰进行一定的抑制,来提升检测能力。
2.3 虚拟阵波束形成
由于实际情况,在安装水听器时,并不能按照等间距的情况布阵,因此在对目标进行方位估计时会产生较高的旁瓣。鉴于这种情况,对不等间距阵型进行研究,将虚拟阵元填充到原阵型中,将其补成等间距阵后进行波束形成。
布阵情况如图4所示,图中实心圆代表实际阵元,空心圆代表虚拟阵元。

图4 不等间距线阵
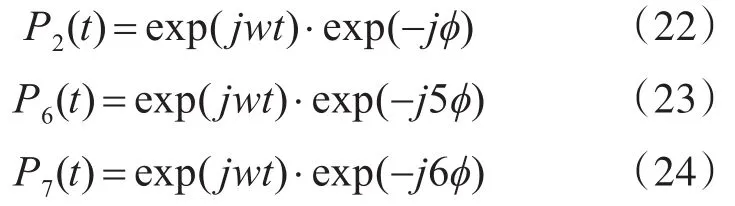
假设一号阵元接收的数据为

则二号、六号、七号阵元接收的数据为
根据每个阵元接收的数据可以得出导向矢量

所以虚拟阵元所接收的信号为

3 仿真分析
声压线阵仿真参数为:阵元数M为8,信号以方位角θ=30°入射到声压线阵上,频率为f=1500Hz,水下声速 c=1500m/s,采样率10KHz,阵元间距0.5m。信噪比为10dB。
矢量线阵仿真参数为:阵元数M为8,信号以方位角θ=30°入射到矢量线阵上,频率为f=1500Hz,水下声速 c=1500m/s,采样率10KHz,阵间距为0.5m。信噪比为10dB。
从图5和图6对比可以看出,相比于声压阵,矢量阵的阵增益要高于声压阵,并且矢量阵可以解决左右舷侧模糊问题。

图5 声压阵CBF

图6 矢量阵CBF
组合指向性仿真参数为:阵元数M为8,信号以方位角θ=30°入射到矢量线阵上,频率为f=1500Hz,水下声速c=1500m/s,采样率 10KHz,阵间距为0.5m。信噪比为10dB。
图7和图8分别为引导方位为90°以及-90°时,指向性进行组合后的波束形成结果图。可以看到当引导方位在信号一侧时,可以检测到信号,但是当引导方位与信号方位不一致时则可以起到抑制信号的作用。

图7 引导方位为90°

图8 引导方位为-90°
虚拟阵元仿真参数为:不等间距阵元位置为(0,0.3,1.5,1.8)m,信号以方位角θ=90°入射到矢量线阵上,频率为f=1800Hz,水下声速c=1500m/s,采样率10KHz,阵间距为0.5m。信噪比为-10dB和10dB。
通过图9和图10可以看出,对不等间距阵进行虚拟阵元填补后,不仅可以压低旁瓣,还可以提升一定的阵增益。但是由于该方法的导向矢量是由阵元之间得出的,所以存在两个问题。一是对于多目标信号,该方法的适用性不强;二是在信噪比过低的情况下,得到的导向矢量不准,导致性能下降。

图9 -10dB下性能对比

图10 10dB下性能对比
4 试验数据处理
试验条件:目标船固定不动,声源持续发1kHz连续信号,接收阵固定不动接收信号。
处理结果如图11所示。从图中可以看出,矢量阵的处理结果要优于声压阵的结果。矢量阵可以有效解决左右舷侧模糊问题。并且矢量阵的空间谱图,其旁瓣值要比声压阵空间谱图的旁瓣低3dB左右。

图11 声压阵与矢量阵CBF结果对比
试验条件:目标船固定不动,声源持续发1kHz连续信号,声源级按照3dB衰减,接收阵固定不动接收信号。
处理结果如图12和图13所示。对声压阵和矢量阵的检测能力进行了对比,图12和图13分别为声压阵和矢量阵的部分时间历程图,从图中可以明显看出,在500s时声压阵的历程图中目标轨迹已经没有矢量阵的清晰。说明在该信噪比条件下,声压阵的检测效果已不如矢量阵。结果与图11所得出的结论也可相互印证。

图12 声压阵时间方位历程图

图13 矢量阵时间方位历程图
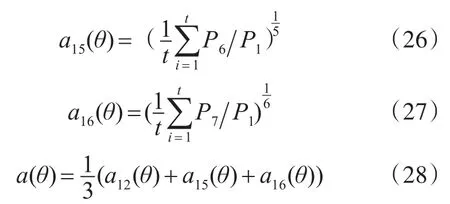
试验条件为:目标船不动,持续发1kHz连续信号,接收阵匀速旋转360°。
处理结果如图14、图15、图16所示。上述三幅图为不同方法的时间方位历程图。从对比中可以看出,声压阵存在左右舷侧模糊问题,矢量阵可以解决该问题。P+Vs的方法从图中可以看出,有着很好的抑制信号的效果。能够接收到引导方位所对准方向的信号,抑制不感兴趣方向的信号。但是也存在的一个问题是,该方法会出现舷侧模糊问题。造成这个问题的主要原因是在对振速信息进行组合后,从指向性图中可以看出,其具有了单边指向性,但是矢量阵在进行左右舷侧分辨时,是需要另一边指向性的。由于另一边指向性的值变得相对较小,所以其左右舷分辨能力被减弱。
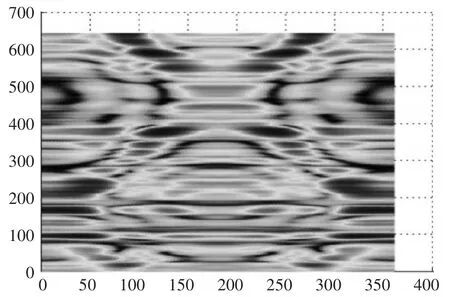
图14 声压阵时间方位历程图
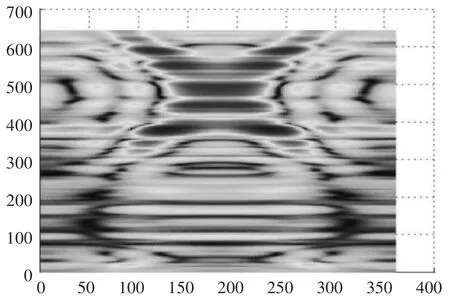
图15 矢量阵(P+Vs)时间方位历程图
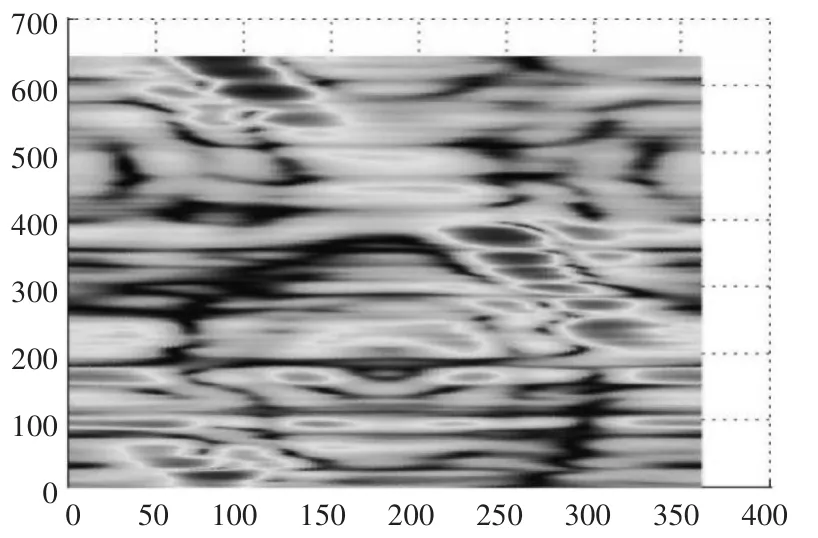
图16 矢量阵时间方位历程图
试验条件:目标船不动,持续发1.8kHz连续信号。声源级按照3dB衰减。接收阵为四元不等间距线阵,布阵形式如图4所示。
处理结果如图17和图18所示。在图18中可以看到,由于布阵的方式为不等间距布阵,导致处理结果中会出现较高的旁瓣,大大影响了对目标方位的判断。而在图17中,可以看到在信噪比较高的情况下,该方法的效果较为明显。但是当随着信噪比的下降,导致该方法中所得的导向矢量不准,因而导致性能提升不明显。该结论与仿真结果也能相互印证。

图17 1.8K虚拟阵元
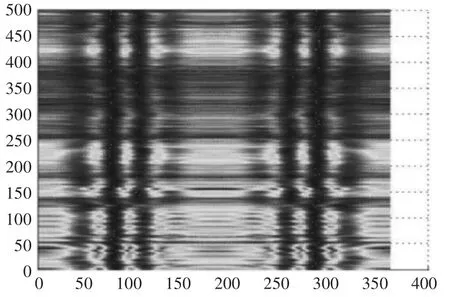
图18 1.8K不等间距阵元
5 结语
通过对声压阵以及矢量阵被动测向算法的研究。本文分别从理论,仿真以及试验数据处理结果三方面对两种阵列的性能进行了比对。矢量阵相比声压阵有3dB的阵增益,可以进行左右舷侧模糊。并且矢量阵通过自身振速的指向性组合可以达到抑制固定方向信号的作用。另外,针对不等间距布阵的情况。进行了虚拟阵波束形成算法研究,该方法可以起到抑制旁瓣的效果,并且可以提升一定的阵增益。
猜你喜欢
中学生数理化·高一版(2021年11期)2021-09-05
现代职业教育·中职中专(2018年10期)2018-05-14
小学教学参考(语文)(2016年9期)2016-09-30
考试周刊(2016年69期)2016-09-21
学周刊·下旬刊(2016年9期)2016-06-14
科技视界(2016年11期)2016-05-23
科教导刊·电子版(2016年3期)2016-03-14
新高考·高一物理(2016年1期)2016-03-05
现代电子技术(2015年17期)2015-09-23
现代电子技术(2014年3期)2014-03-05
