
基于差分进化算法的雷达网目标分配方法研究*
2022-11-09 07:27李鹏飞
舰船电子工程 2022年8期
鲁 军 李鹏飞
(陆军炮兵防空兵学院郑州校区 郑州 450000)
1 引言
随着高技术空袭兵器的投入和战场环境日趋复杂,低空超低空突袭、隐身目标、电子干扰、反辐射导弹等威胁更加严重,给防空兵部队对空侦察带来以下两个主要问题:一是单一雷达装备的探测威力有限,极易出现探测资源饱和问题;二是假如不进行雷达网内各雷达合理控制,就会出现多雷达持续跟踪、监视同一批目标的重复探测问题,造成对空侦察资源浪费。雷达组网运用多雷达数据融合技术,对多雷达进行控制调度,能够实现空情信息相互印证与共享、探测范围扩展、空间分辨率和检测性能提升,已成为了有效应对“四抗”挑战的主要方式[1]。然而,在多目标、多批次、多方向空袭的的背景下,由于雷达装备资源相对不足,必须要化解雷达网目标分配问题,对雷达网内各雷达进行统一调度,发挥其探测优势,实现利用有限的雷达完成对目标的探测、跟踪与监视。雷达网目标分配是指在满足规定的的发现概率与合适的雷达资源调用约束条件下,为雷达网中各雷达合理分配目标探测任务,实现利用最少的雷达资源完成对雷达网责任空域中的多目标探测任务[2]。目前,已有很多学者利用遗传算法[3]、萤火虫算法[4]、蜂群算法[5]以及分解协调法[12]等研究雷达目标分配问题,但将差分进化算法运用于雷达网目标分配的研究还比较少。完成雷达网多雷达多目标分配,不仅能提升整体探测效能,也能间接减弱网内各雷达的探测压力。面对复杂的战场环境,情报人员难以快速、准确地进行目标分配。因此,必须要利用辅助决策手段,进行雷达目标分配。本文利用差分进化算法能够完成雷达网目标分配由“人在回路中”的人力主导模式向“人在回路上”的监督调控模式转变,实现“人机结合、自主协同”,增强雷达网整体作战能力。
2 雷达网目标分配的数学模型
雷达网目标分配就是空情融合处理中心依据空中来袭目标的位置与合适的分配原则控制网内多雷达对目标进行跟踪与监视,保证雷达装备开机最少情况下整个雷达网对目标的发现概率最大。由于防空作战要求提供可靠、准确、连续的空情保障,因此在雷达网目标分配时应坚持以下基本原则[6~9]:一是发现概率最大原则;二是开机数目最少原则;三是连续跟踪监视原则;四是上级指定目标和威胁程度高的目标优先分配原则。
基本问题假定:雷达网由N部不同型号的雷达组成,每部雷达都能独立探测空中目标;依据有关情报得知,敌方M批目标从不同方向进入防区,每批目标既可以是单机,也可以是多架飞机组成的编队。
在符合雷达网对空中目标发现的给定概率p0和雷达开机数目最少的要求下,雷达网对第j批目标的发现概率为

整个雷达网对空中所有目标发现概率最大的目标分配目标函数和雷达网开机数目最少的目标函数分别为
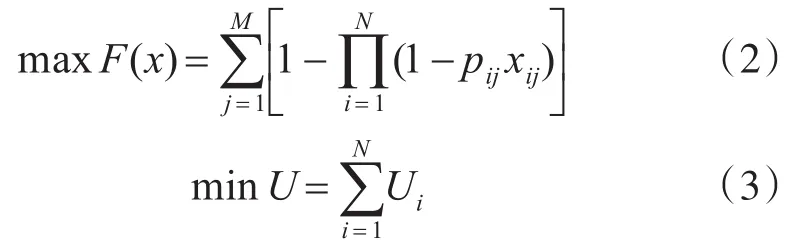
式中:maxF(x)表示雷达网发现概率最大;minU表示雷达网中雷达开机数目最少,其中Ui表示第i雷达的开关情况,关机为0,开机为1。
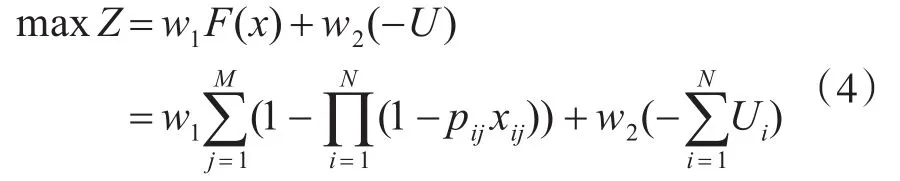
将式(2)、式(3)定义的两个目标函数进行目标单一化处理,令F(x)的权重为w1,U的权重为w2,w1+w2=1,可得到新的目标函数为
约束条件(s.t)为
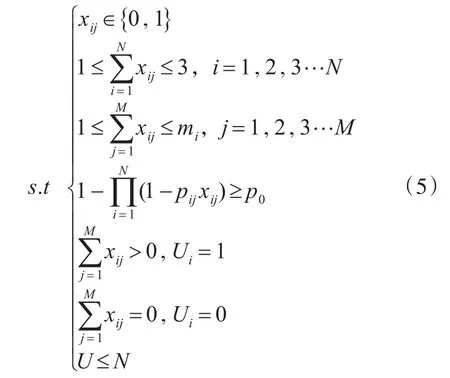
式中:约束条件xij∈{0,1}表示,当xij为1时,雷达网分配第i部雷达监视第j批目标,xij为0时,雷达网不分配第i部雷达监视第j批目标。
3 差分进化算法
差分进化算法(Differential Evolution,DE)是由Storn与Price在遗传算法等进化思想的基础上针对参数优化提出来的[10~11],是一种群体智能的随机并行搜索优化算法,具有收敛快速、容易实现、结构简单、鲁棒性强等特点,主要用于求解多维空间整体最优解和解决实数优化问题。差分进化思想主要来源于生物进化,通过模仿生物群体中各个个体之间的竞争与合作,促使适应于环境的个体保留下来。该算法的运算过程主要包括初始化种群、变异、交叉与选择等操作,算法的流程如图1所示。
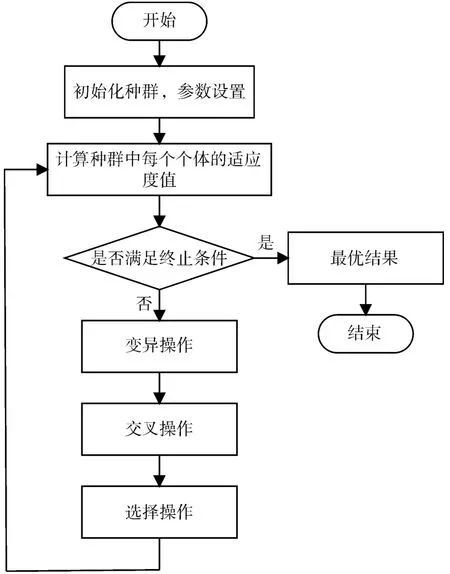
图1 差分进化算法流程图
利用差分进化算法求解数学模型的具体步骤如下:
1)种群初始化
在解空间中均匀、随机地生成NP个个体,每个个体均由D维向量组成,第0代种群为

通过以下公式确定初始个体第j维元素值:

式中:xi(0)表示种群中第0代的第i个个体xj,i(0)表示种群第0代的第i个个体的第j个基因。NP表示种群的大小,[Uj_min,Uj_max]表示第j维上的取值范围,rand(0,1)表示在[0,1]之间的随机数。
2)变异操作
种群初始化后,通过父代差分向量生成变异向量。一般通过以下公式进行变异操作:

式中:xi(g)表示第g代种群中的第i个个体,xk2(g)-xk3(g)表示父代差分向量,F表示缩放因子,取值范围为[0,2]。
3)交叉操作
变异操作之后,变异向量vi(g+1)与父代向量xi(g)进行二项式交叉生成新的个体向量,按照下列公式进行交叉操作:
式中:CR表示种群交叉概率,取值范围为[0,1],jrand表示[1,2…,D]中的随机数。
4)选择操作
交叉操作之后,新的个体向量与父代向量进行竞争选择,将个体向量mi(g+1)与父代向量xi(g)对应的适应度值进行对比,本文的适应度函数为目标函数且为函数极大值,选择一个适应度值最好的作为下一代个体。差分进化算法通常利用贪婪算法筛选出进入下一代种群的个体:

4 仿真试验及分析
为验证本文所提出的雷达网目标分配方法的可行性与算法的有效性,在PC机上用Matlab2012进行仿真试验分析。依据有关情报可知,雷达网由N部雷达网组成,有M批目标进入我防区,对我重要保卫目标造成威胁。通过本文构建的目标分配数学模型和目标分配流程,对雷达网目标分配问题进行求解,得到雷达网探测概率最大且雷达开机最少的目标分配方案。利用文献[12]给出的7部雷达与12批目标的的实验数据进行仿真对比分析,各部雷达对来袭目标的探测概率如表1所示。其中,M=12,N=7;探测概率小于0.5时,认为雷达没有发现该目标,将其值置为0。
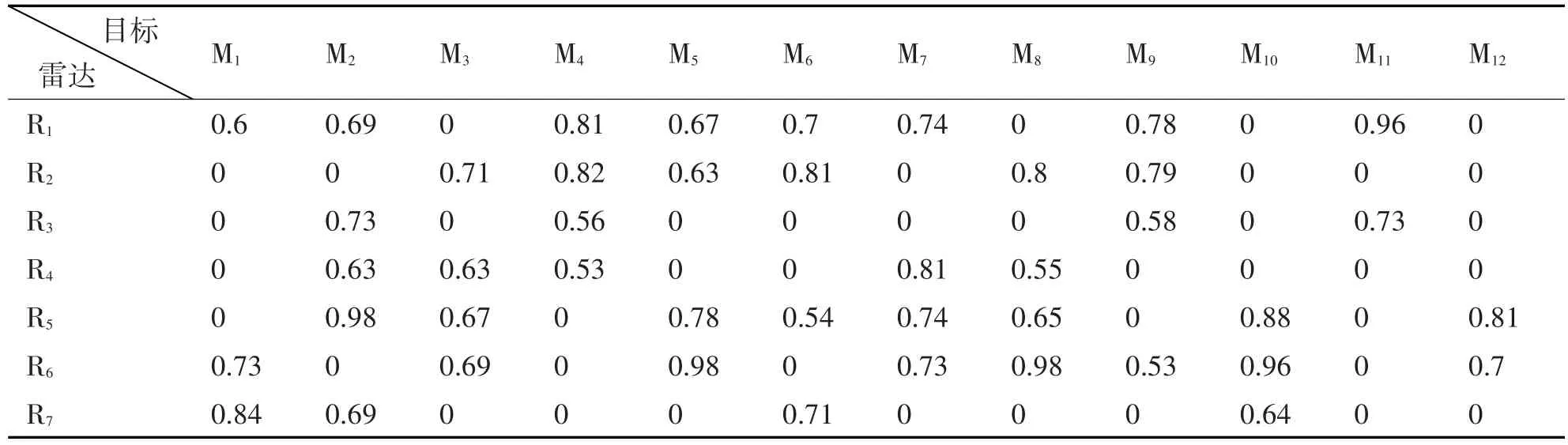
表1 雷达对各批目标的探测概率
假设P0=0.95,mi=50,种群规模NP=30,交叉概率CR=0.2,缩放因子F=0.5,终止条件为迭代1000次。利用差分进化算法求解文中构建的雷达网目标分配数学模型,可得到差分进化算法收敛曲线如图2所示,从图中可以看出,在迭代400次后,获得了雷达网最优目标分配的适应度值。
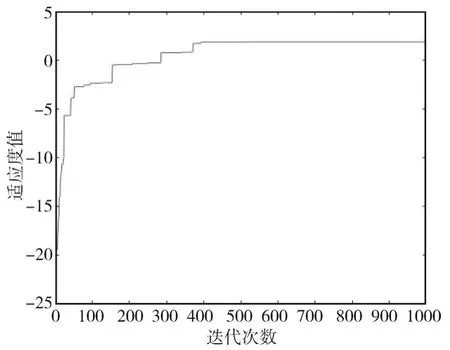
图2 差分进化算法收敛曲线图
为验证本文所提方法的可行性,将基于差分进化算法和基于文献[12]的分解协调法雷达网目标分配方案进行对比分析。如表2所示为基于分解协调法的目标分配方案,表3所示为本文利用雷达网目标分配模型和差分进化算法得到的雷达网目标分配方案。
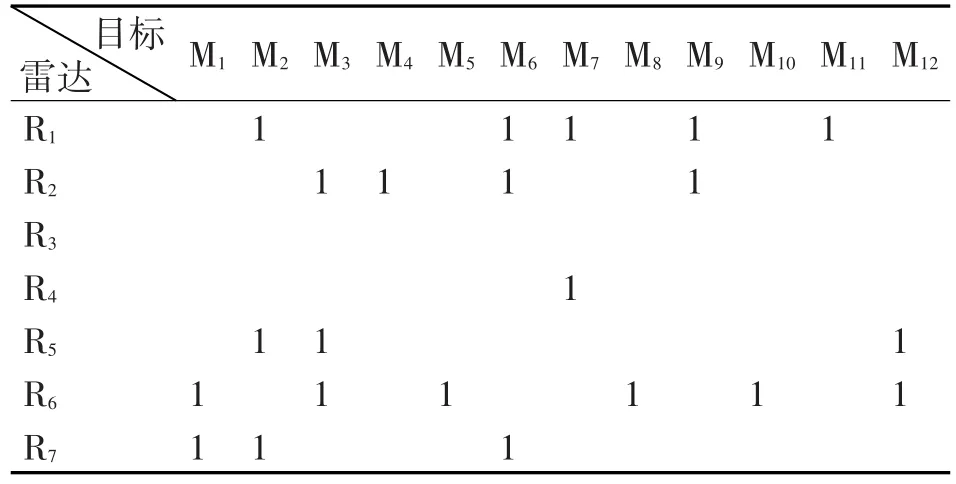
表2 基于分解协调法的雷达网目标分配方案
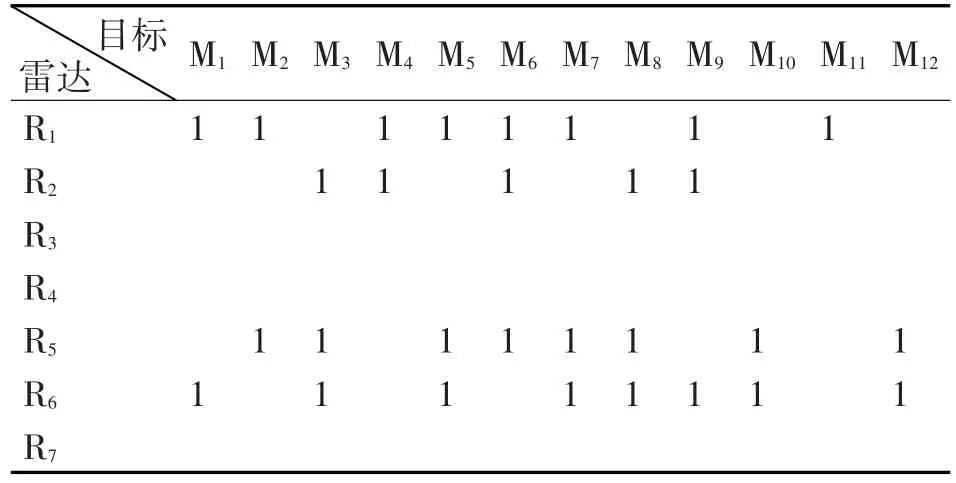
表3 基于差分进化算法的雷达网目标分配方案
由表2可知,文献[12]提出的分解协调法能够解决雷达目标分配问题,在满足雷达最大探测概率的情况下,防区部署的7部雷达只开了6部,第3部雷达可以关闭,降低被敌方发现的概率;从表3可得,运用本文提出的数学模型与差分进化算法对雷达网目标进行分配,在符合雷达网对空中来袭目标探测概率最大和雷达开机最少的要求下,完成雷达网目标分配任务,其中雷达网中7部雷达只需开机第1、2、5、6部雷达,其他3部雷达可关闭,最大限度地减少了雷达辐射,提高了雷达网战场生存能力;通过表2与表3的目标分配方案对比可以发现,本文提出的基于差分进化算法的雷达网目标分配方法可行,且分配的效果较好,能够很好地解决雷达网目标分配问题,提升了雷达网整体探测效能。
5 结语
雷达网目标分配是防空兵对空侦察任务的重要内容,合理有效地进行目标分配,是在雷达装备相对不足的情况下完成多目标的有效探测与连续跟踪的关键。本文提出了基于差分进化算法的雷达网目标分配方法,基于目标分配基本分配原则,建立雷达网目标分配模型,并利用差分进化算法对目标函数进行寻优,能够得到雷达网目标分配方案。通过仿真试验,将本文提出的方法与分解协调法进行对比分析,证明该方法的有效性与可行性,为解决复杂战场条件下雷达网目标分配问题提供了一个新的参考方法。
猜你喜欢
今日农业(2022年15期)2022-09-20
上海师范大学学报·自然科学版(2022年3期)2022-07-11
新高考·高一数学(2022年3期)2022-04-28
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
上海师范大学学报·自然科学版(2018年3期)2018-05-14
中学生物学(2018年8期)2018-03-01
计算机应用(2016年10期)2017-05-12
高中生学习·高三版(2016年9期)2016-05-14
新高考·高二数学(2015年11期)2015-12-23
中学生物学(2008年6期)2008-08-29
