“天问一号”火星探测器UHF 频段中继通信系统设计
2022-11-02 09:37孙泽洲强晖萍
南京航空航天大学学报 2022年5期
孙泽洲,强晖萍,韩 宇,白 帆,张 婷,雪 霁
(北京空间飞行器总体设计部,北京 100094)
火星是人类深空探测的重要目标之一,地火之间建立高效、稳定的通信链路是火星探测任务顺利完成的重要前提和基本保障。采用高通信能力、低通信成本的中继通信技术向着陆器提供火星进入、下降和着陆(Entry,descent and landing,EDL)以及火星表面中继通信服务被视为地火通信传输的优选方案[1]。“天问一号”火星探测器作为中国首次火星探测的航天器,通过一次发射完成火星“绕、着、巡”探测任务。探测器由环绕器和着陆巡视器(含进入舱与火星车)组成,发射后历经地火轨道转移、火星制动与捕获、环绕火星飞行、着陆巡视器进入/下降以及火面工作等阶段[2]。在着陆巡视器进入/下降以及火面工作阶段的通信任务中,中继通信比常规的直接对地通信链路有明显优势。直接对地链路需要经过非常遥远的地球-火星距离(高达4 亿千米),而借助火星环绕器进行中继的较短距离通信业务能使着陆巡视器返回更多的数据,提高功率利用率,同时又能减少其通信系统各部件的质量、体积和操作复杂性。当地球不可见时,火星中继链路仍可提供通信服务。本文针对“天问一号”火星探测器的任务特点,重点对UHF 频段中继通信系统设计进行了介绍,给出主要指标设计、中继通信协议设计和中继通信链路设计,最后对在轨飞行试验结果进行了分析。
1 中继通信任务需求
在发射段、地火转移段和火星捕获段,“天问一号”火星探测器的环绕器和着陆巡视器为探测器组合体状态,地面测控系统经环绕器X 频段直接对地链路实现对环绕器及着陆巡视器的控制和状态监视,着陆巡视器无射频测控数传链路需求。
在火星停泊段,着陆巡视器超高频(Ultra high frequency,UHF)频段中继通信设备需开机,与环绕器配合,完成UHF 频段中继通信自检,并开始提供UHF 频段中继通信链路。
在离轨着陆段,火星EDL 前,环绕器和着陆巡视器分离,此过程中需要保持UHF 频段中继通信链路,地面测控系统经环绕器通过UHF 频段中继通信链路对着陆巡视器进行控制和状态监视。在EDL 开始后,着陆巡视器无前向链路控制要求,此时仅需保持UHF 频段中继返向通信链路,地面测控系统经环绕器通过UHF 频段中继返向链路对着陆巡视器进行状态监视。
在着陆巡视器着陆火星表面后,地面测控系统通过环绕器UHF 频段中继链路对着陆巡视器进行控制、状态监视并传输业务数据,或者通过X 频段对地链路对着陆巡视器进行控制和状态监视。其中探测器UHF 频段中继通信链路见图1。具体包括:环绕器与进入舱的UHF 频段中继通信链路以及环绕器与火星车的UHF 频段中继通信链路。图1 中的X 频段链路为环绕器或火星车的直接对地通信链路。
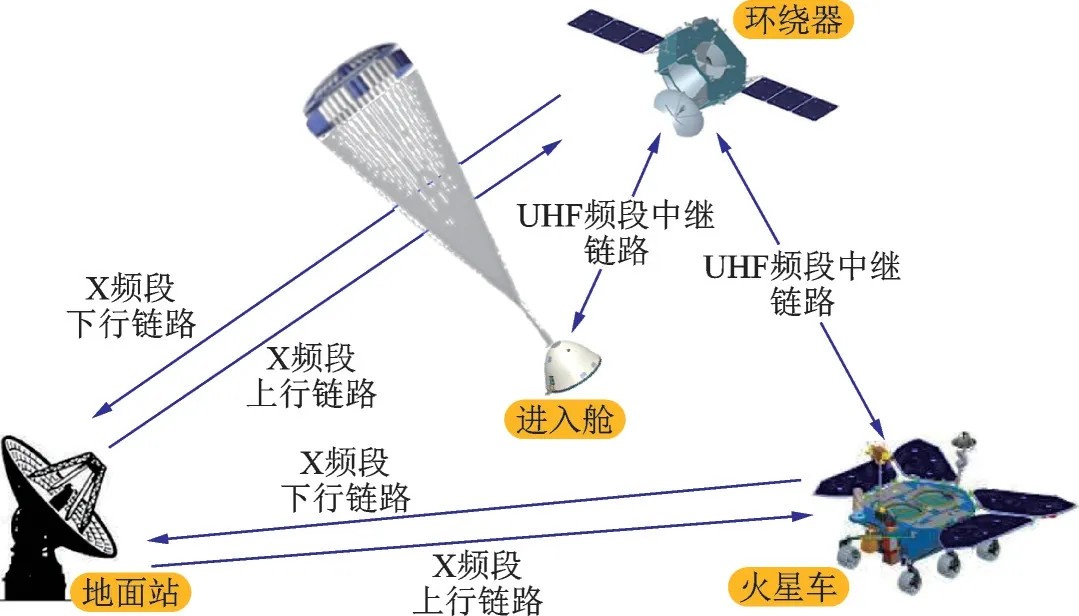
图1 “天问一号”探测器UHF 频段中继通信链路Fig.1 Relay communication link of UHF frequency band of Tianwen-1 probe
2 国际火星探测中继通信系统
目前,国际火星中继网络中的轨道器,除了中国的“天问一号”环绕器外,仅NASA 的火星奥德赛、火星勘察轨道器(Mars reconnaissance orbiter,MRO)以及ESA(European space agency)的火星快车仍在轨运行,支持着火星探测中通信和导航的需要。而在火星表面工作的探测器,除了中国的“祝融号”火星车外,仅有NASA 的“好奇号”“毅力号”等处于工作状态[3-11]。
NASA 的火星探测器中继通信系统均采用UHF 频段,系统在设计上基本相同。以“好奇号”的UHF 频段通信子系统为例,其UHF 频段通信子系统包括2 台UHF 应答机、2 台多工器、2 个同轴开关以及3 个UHF 天线,见图2。UHF 天线包括安装在降落伞上的UHF 天线(Parachute UHF antenna,PUHF)、下降级上的UHF 天线(Descent UHF antenna,DUHF)以及在巡视器上的UHF 天线(Rover UHF antenna,RUHF)。好奇号的UHF 通信子系统仅在EDL 段和表面巡视段工作[6]。
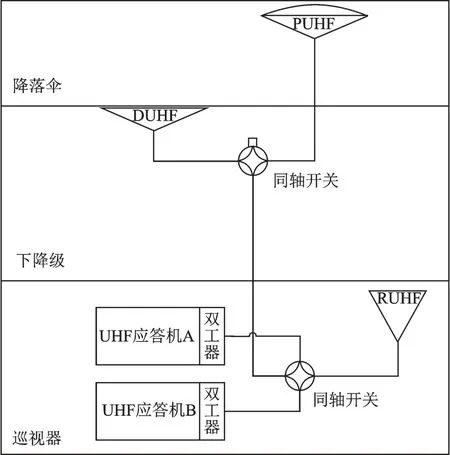
图2 NASA“好奇号”UHF 频段通信子系统[6]Fig.2 Communication subsystem of UHF band of NASA Curiosity
在EDL 段,除了X 频段链路外,“好奇号”的3 个UHF 天线分时工作:PUHF 天线从巡航级分离开始工作,直至背罩分离前;DUHF 天线在动力下降段工作;RUHF 天线从巡视器分离后开始工作,而整个表面巡视任务的UHF 频段中继通信都由RUHF 天线完成。
3 UHF 频段中继通信系统设计
3.1 系统组成
“天问一号”探测器UHF 频段中继通信系统组成见图3。包括环绕器UHF 频段收发信机、环绕器UHF 网络、环绕器UHF 频段接收/发射天线,进入舱UHF 频段收发信机、进入舱背罩天线,火星车UHF 频段收发信机、火星车UHF 频段中继天线。其中,UHF 频段收发信机是中继通信系统的核心设备,完成中继通信协议实现、编译码、调制解调以及变频放大等功能。
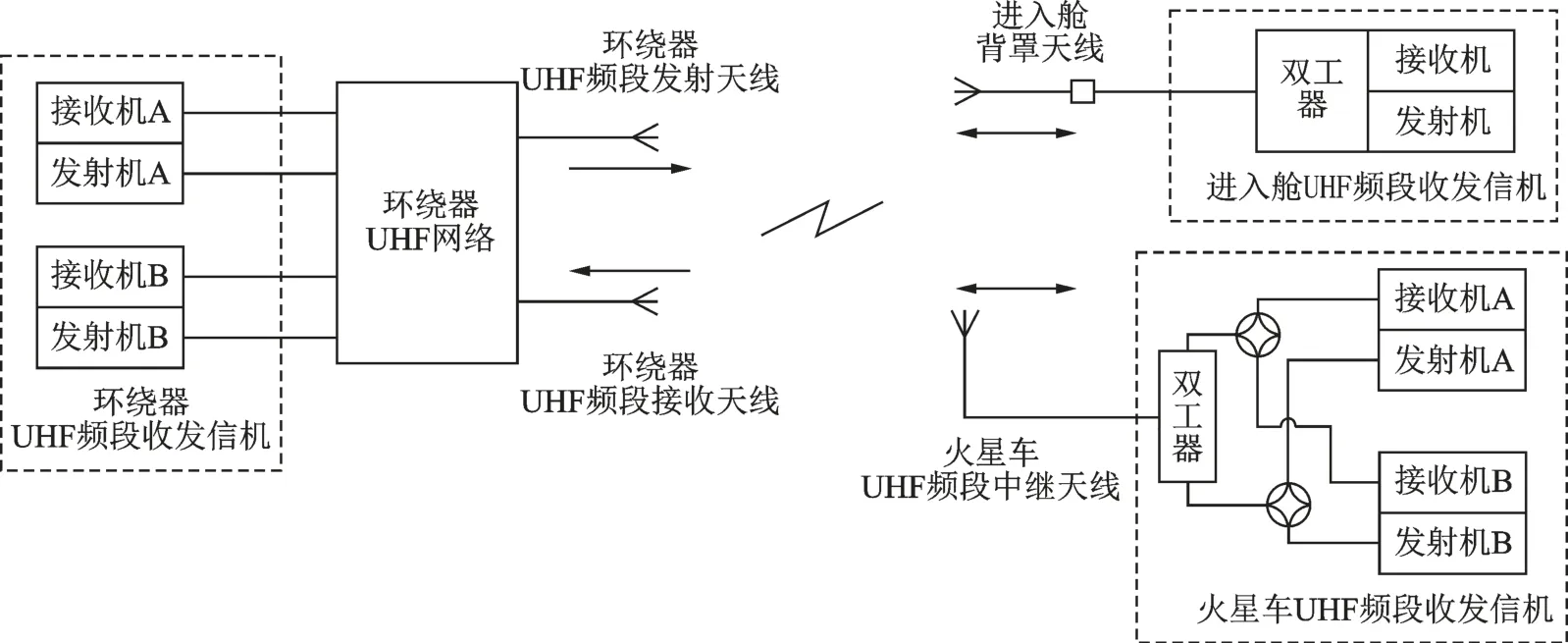
图3 “天问一号”探测器UHF 频段中继通信系统Fig.3 Relay communication system of UHF band of Tianwen-1 probe
3.2 工作模式
在两器分离及EDL 阶段,由进入舱通过UHF频段收发信机和UHF 频段中继天线与环绕器建立双向中继通信链路。
火面巡视探测阶段,由火星车通过UHF 频段收发信机和UHF 频段中继天线与环绕器建立双向中继通信链路。 具体工作模式详见表1。

表1 探测器UHF 频段中继通信系统工作模式Table 1 Operating mode of UHF band relay communication system
3.3 主要技术指标
3.3.1 通信体制
UHF 频段中继系统采用曼彻斯特编码辅助残留载波BPSK 调制的方式实现。通过采用小于π/2(弧度)的调制指数,使得信号频谱中出现离散(残留)的载波分量。同时,曼彻斯特编码功率谱密度在零频率处为零,调制信号与残留载波分量可以有效分离,通过精细滤波和窄带宽环路跟踪,实现对载波的提取跟踪。
针对残留载波调制的特点,利用科斯塔斯鉴相跟踪方式,将载波锁定在I 支路,信息锁定在Q 支路,避免解I、Q 相位翻转的问题,减小了处理复杂度;通过多级滤波抽取模块,提取出各速率档抽头,将除载波以外的其他信息全部滤除,实现极低信噪比的跟踪;利用曼彻斯特编码的特点,将各速率抽头上的Q 支路信号进行匹配相关和能量积分,通过正负能量累加判决,可在没有先验信息的情况下判断出当前传输数据的速率,实现通信码速率的自适应估计与解调[12]。
3.3.2 信道编码
UHF 频段中继通信系统采用卷积码作为信道编码方式。卷积码采用CCSDS 推荐的(7,1/2)卷积码,在1×10-6的误码率情况下可取得约4.5 dB的信道编码增益。
3.3.3 中继通信协议
UHF 频段中继通信系统双向通信采用CCSDS 邻近空间链路协议(Proximity-1)。火星探测任务的通信距离远,地面遥控指令时延大且弧段时间有限,无法实时控制,UHF 频段中继通信的智能化和可靠性需求迫切,具体包括:需具备自主建立通信及结束通信的能力,从而摆脱对地面精确控制的依赖;需具备智能变更通信参数的能力,从而以紧贴信道的香农限进行通信,使通信弧段内传输的数据量最大;需具备自主错误重传的能力,确保前向指令和返向科学探测数据的正确性;具备重传跳出的能力,确保中继通信不中断。
(1)通信自主建立及自主结束设计
通信自主建立通过握手反馈确认的方式进行,其状态转换图如图4 所示。当发起呼叫时,发起方和响应方的接收机均设置为握手信道,响应方的发射机处于关机状态。发起方首先以1 kb/s 的码速率在握手信道上发送包含响应方发射机参数和接收机参数设置指令的握手信号;响应方在握手信道上接收到握手信号后,解调出设置发射机和接收机参数的指令,接收机立即切换为工作信道并打开发射机,在握手信道上以1 kb/s 码速率回复握手反馈信号;发起方接收机在握手信道上接收并解调出握手反馈信号后,握手过程结束,转入业务通信状态。
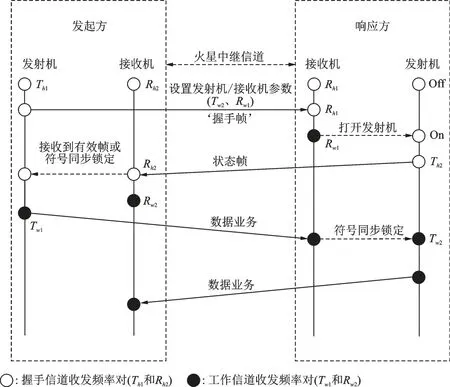
图4 通信建立状态转换图Fig.4 State transition diagram for communication establishment
通信自主结束通过感知信号强度的方式进行,其状态转换图如图5 所示。当中继可见通信弧段结束后,通信的信号强度会剧烈下降从而导致环绕器和着陆巡视器载波失锁。接收机判断长时间失锁后,通信的双方会自动回到握手初始状态,等待下一次握手通信的开始。

图5 通信结束状态转换图Fig.5 State transition diagram for communication ending
(2)通信速率自适应切换设计
通信速率自适应切换通过接收端自主感知信道的信噪比、同各速率档要求的通信门限进行比较、自主发起参数变更的方式实现,其状态转换图如图6 所示。
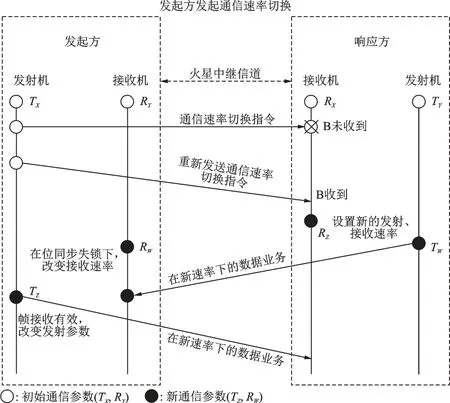
图6 通信速率切换状态转换图Fig.6 State transition diagram for communication rate switching
信噪比估计是通信速率自适应切换的重要环节。传统信噪比估计方法包括数据拟合法、信号方差比估计法、平方信噪方差比估计法以及二阶四阶矩阵法,用这些信噪比估计算法进行估计时需要矩阵分解,复杂度较高。UHF 频段中继通信系统采用基于子空间跟踪的盲信噪比估计算法和基于最大似然方法的盲信噪比估计算法,在较低空间复杂度下可以实现更好的信噪比估计性能。
(3)前返向高可靠通信设计
UHF 频段中继的前返向高可靠通信通过回退N 帧 自 动 重 传 请 求(Automatic repeat request,ARQ)实现,并且采取基于丢帧点播的方法,自适应切换当前ARQ 发送序列,可以实现高效重传,并保证通信的可靠性,其设计方案如图7 所示。
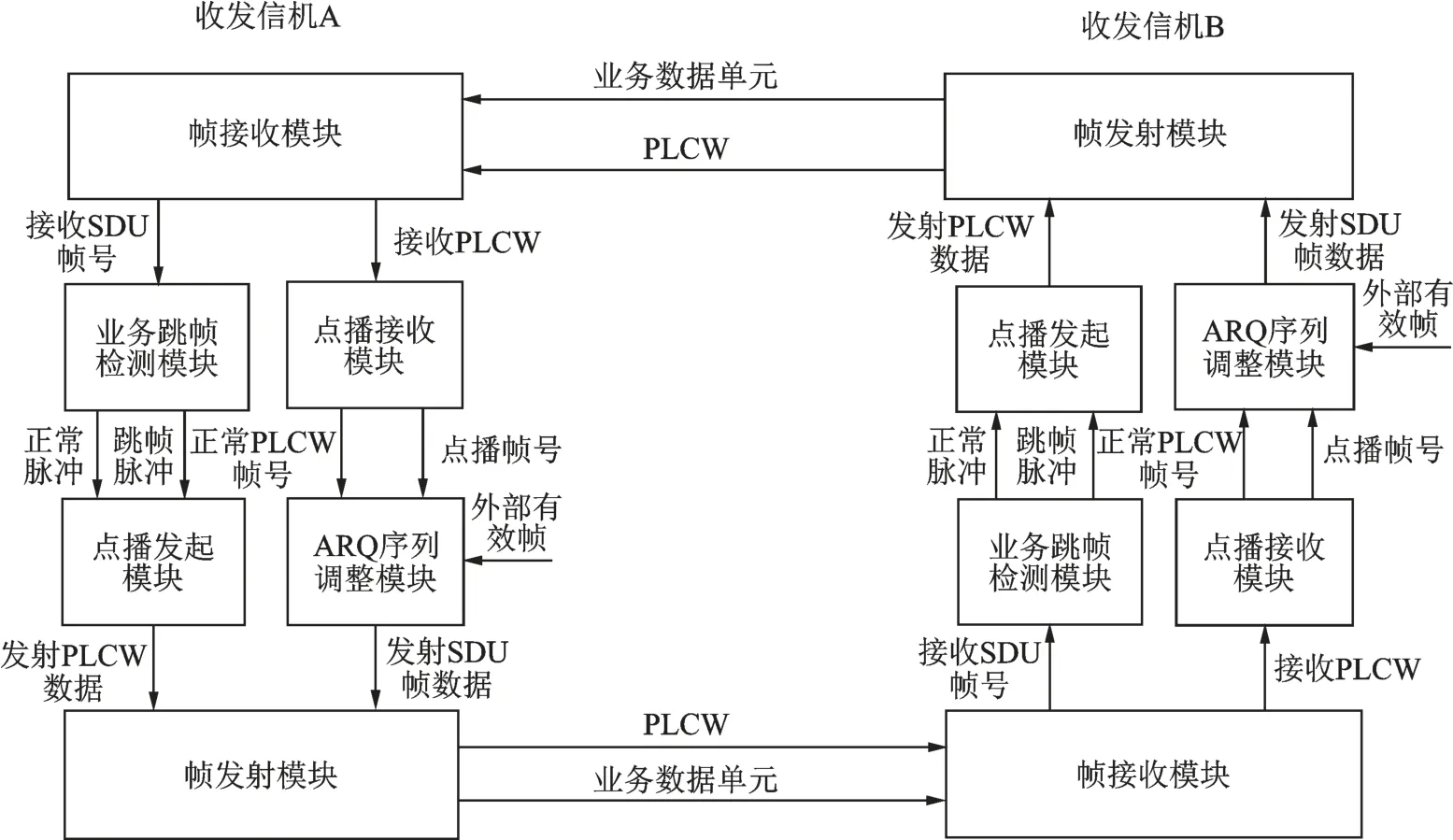
图7 ARQ 设计方案Fig.7 ARQ design scheme
UHF 频段中继通信采用CCSDS Proximity-1全双工协议,因此前返向链路的吞吐量存在相互制约[13-14],即返向有效传输速率受制于前向接收邻近链路协议控制字(Proximity link control word,PLCW)的时间和返向滑动窗口长度,前向有效传输速率同样受制于返向接收PLCW 的时间和前向滑动窗口长度。前向链路主要传输遥控指令,数据量需求小,对数据吞吐量要求不高;而返向链路传输数据包括大量相机拍摄图像、科学探测数据和各分系统遥测数据等,数据量大。因此需要合理设置前返向码速率的匹配关系以及滑动窗口长度,确保在全双工状态下返向数据吞吐量最优,在有限的通信弧段内最大限度地传输数据。综合考虑中继通信设备的存储能力、中继信道能力以及链路时延,滑动窗口长度选择10,前向码速率选择32 kb/s,可以使返向数据吞吐量最大。
(4)重传跳出设计
如果接收端无法正确反馈PLCW,或者发送端不能正确地接收PLCW,整个中继通信过程会因此中断,导致信道堵塞。所以,UHF 频段中继通信系统引入了跳出机制,即接收方实时监测其发送的PLCW 帧号,在帧号发生变化时计时器清零并计时,进行一定时间的监测和状态判读,如判断出进入异常ARQ 状态,则触发ARQ 跳出机制。
3.3.4 码速率
针对EDL 过程及环火中继轨道动态特性,探测器UHF 频段中继通信系统前向支持7 挡码速率,为1~64 kb/s(2N,N=0~6),返向支持12 挡码速率,为1~2 048 kb/s(2N,N=0~11)。
在两器分离至EDL 过程中,通信码速率保持固定不变,前返向均为2 kb/s;在火星表面工作的近火段,环绕器通过UHF 窄波束(±30°)实现对着陆巡视器的双向通信,并根据中继轨道变化返向码速率从1~2 048 kb/s 自适应切换;在火星表面工作的远火段,通信码速率保持固定不变,前返向均为1 kb/s。
4 通信链路设计与分析
4.1 UHF 频段中继通信工作过程
UHF 频段中继通信系统在两器分离、EDL、着陆巡视器着陆至寿命结束工作。其中,在两器分离至着陆巡视器着陆前作为地面控制、监视着陆巡视器状态的唯一手段;在着陆后作为地面控制着陆巡视器及着陆巡视器下传业务数据的主用手段。
(1)两器分离至环绕器抬轨
两器分离按照约0.5 m/s 分离速度进行分离,当两器相距距离大于30 m 时(约1 min),通过延时指令开启着陆巡视器UHF 频段收发信机发射机,中继通信处于单工状态。在此过程中环绕器UHF中继通信设备的接收、发射部分引入50 dB 衰减,防止近距离下接收功率过大,造成接收机损坏。约1 h 后,环绕器升轨。
(2)环绕器抬轨完成至着陆巡视器火星大气进入
环绕器升轨完成后,两器距离约为1.5 km。在升轨过程中通过开关切换,取消环绕器UHF 通道中的衰减。进入舱UHF 频段收发信机工作在单工状态,通过UHF 频段前向链路传输着陆巡视器遥控以及注入数据,通过返向链路下传着陆巡视器器务和业务数据。(3)EDL 阶段(背罩分离前)
着陆巡视器EDL 过程中,中继通信保持前、返向链路。此过程,着陆巡视器进行气动减速,可能会有一段时间黑障,期间无法进行中继通信。打开降落伞后,姿态处于不稳定状态。着陆巡视器在EDL 过程中抛除降落伞和背罩,此时背罩天线与收发信机脱离。着陆巡视器通过分离信号触发和提前注入延时指令两种手段关闭进入舱UHF 频段收发信机,打开火星车UHF 频段收发信机。
(4)EDL 阶段(背罩分离后)
背罩分离后直至当圈中继通信弧段结束,中继通信保持前、返向链路。背罩分离后通过分离信号触发和提前注入延时指令两种手段开启UHF 频段收发信机,处于单工状态,直至着陆后10 min 左右,UHF 频段收发信机通过程控指令控制关闭发射机,进入全双工状态,并作为响应方等待环绕器发起中继通信。落火后,着陆巡视器UHF 频段中继天线对环绕器覆盖弧段与EDL 过程持续时间有关,EDL 过程越长落火后天线覆盖弧段越短,在考虑着陆姿态偏差的情况下,无法保证落火后一定有UHF 频段中继天线对环绕器覆盖的弧段。
(5)火星表面工作阶段(环绕器中继轨道运行)
环绕器在与着陆巡视器分离后,需调整进入中继通信轨道,实施为期约3 个月的中继通信任务,并兼顾科学探测。为保证稳定的中继通信弧段,中继轨道设计成天回归轨道,考虑到停泊轨道和遥感轨道的衔接,探测器标称中继轨道选择1 天运行3圈的回归轨道,轨道周期约8.2 h。UHF 频段中继通信链路的前向码速率为32 kb/s(编码后),返向码速率根据两器距离可在1~2 048 kb/s(编码后)间切换。近火通信弧段时长约10 min,由于两器距离较近,返向码速率峰值可达到2 048 kb/s(编码后),可用于下传工程遥测和大数据量载荷数据等。远火通信弧段通信时长较长,可达数个小时,但通信距离较远,导致期间UHF 频段中继通信返向码速率降至系统最低值1 kb/s(编码后)。
4.2 天线覆盖范围分析
4.2.1 背罩天线覆盖范围分析
环绕器UHF 频段中继天线,垂直安装在环绕器对火面上,电轴与环绕器对火面垂直;着陆巡视器背罩天线安装于着陆巡视器背罩上,其电轴与着陆巡视器+X轴重合。定义两器几何中心连线与环绕器+Z轴夹角为α,两器连线与着陆巡视器+X轴夹角为γ,定义角度示意图如图8 所示,通过分析α和γ两个角度的变化范围,确定背罩天线在此阶段进行中继传输,波束需覆盖的范围。
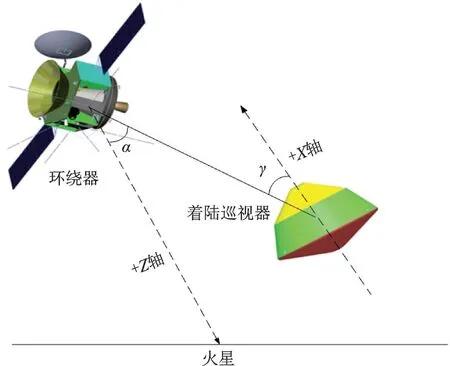
图8 两器分离后至EDL 阶段天线覆盖角度分析示意图Fig.8 Schematic diagram of antenna coverage analysis from separation to EDL stage
(1)两器分离至着陆巡视器进入点前覆盖范围
环绕器UHF 频段中继天线波束角为±80°,方位角为0°~360°;着陆巡视器背罩天线俯仰方向与+X轴最大夹角为80°,方位方向上与-Z轴夹角为-100°~100°。
两器分离后(建立中继姿态)至着陆巡视器火星大气进入前,α和γ角均在天线波束角指标范围内,可以保证环绕器与着陆巡视器全程可见。天线覆盖仿真分析如图9 和10 所示。
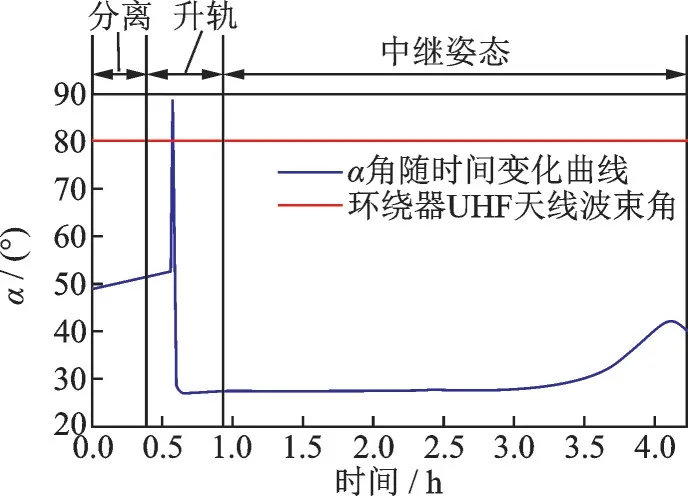
图9 两器分离后至进入前α 角Fig.9 α angle from separation to entry
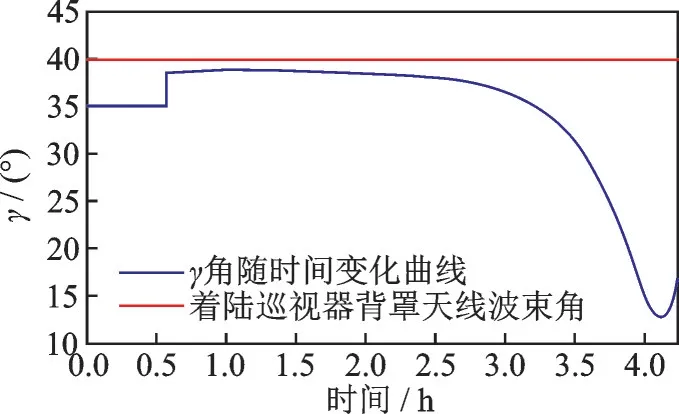
图10 两器分离后至进入前γ 角Fig.10 γ angle from separation to entry
(2)EDL 阶段覆盖范围分析
从进入点开始至着陆,着陆巡视器完成开伞、抛背罩等动作导致姿态处于不稳定状态,γ角出现不规律变化。环绕器在对日定向姿态下,选择合理的绕+Z轴转动角度,可以使α 角小于80°。天线覆盖仿真分析如图11 和12 所示。
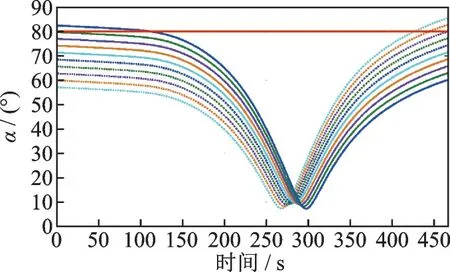
图11 EDL 段α 角(环绕器绕+Z 轴转动不同角度对比)Fig.11 α angle of EDL stage (different angles of rotation around + Z axis)

图12 EDL 段γ 角Fig.12 γ angle of EDL stage
4.2.2 UHF 频段中继天线覆盖范围分析
考虑着陆姿态15°的不确定量,当俯仰角小于65°时,进入UHF 频段中继天线波束范围内;俯仰角小于15°时,进入火星车UHF 频段中继天线高增益区。火星表面中继通信角度及距离变化示意图如图13 所示。随着时间的推移,中继弧段持续时间呈现先缩短再增长的趋势,两器通信距离呈现逐渐增加的趋势。
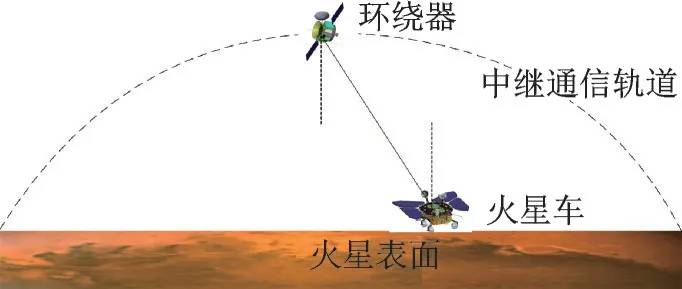
图13 火星表面中继通信角度及距离变化示意图Fig.13 Schematic diagram of relay communication angle and distance change on the surface of Mars
4.3 UHF 频段中继通信链路分析
(1)两器分离至EDL 阶段
两器相距30 m 后,开始进行UHF 频段中继通信(环绕器接收、发射通道含衰减),功率满足接收机最大输入功率要求。环绕器抬轨后,两器相距约1.5 km,在含通道衰减的情况下满足2 kb/s(编码后)通信需求;去除通道衰减后,功率满足接收机最大输入功率要求。整个EDL 过程两器最大相距600 km 时,返向通信码速率采用2 kb/s(编码后)。
(2)火面工作阶段
落火后,两器最大通信距离可达15 000 km,由于两器UHF 频段中继天线在不同的波束范围区域内天线增益不同,仅能在两器UHF 频段中继天线±30°波束内实现最远15 000 km 通信。近火通信弧段前向码速率保持32 kb/s,返向码速率在1~2 048 kb/s 间切换;远火通信弧段前返向码速率保持1 kb/s。
火面工作阶段,UHF 频段中继通信时机示意图如图14 所示。
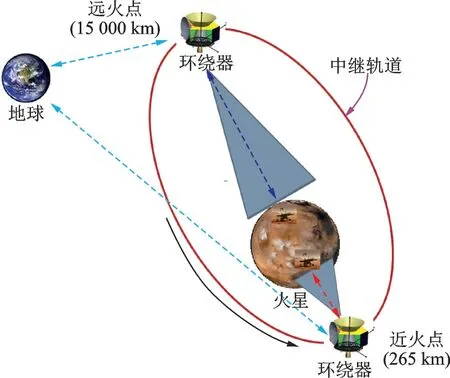
图14 UHF 频段中继通信时机示意图Fig.14 Schematic diagram of UHF band relay communication timing
5 在轨验证情况
2021 年5 月15 日7 时17 分58 秒,着 陆 巡 视 器成功着陆至火星乌托邦平原南部预选着陆区。图15 为EDL 过程进入舱及火星车UHF 收发信机接收机接收信功率的变化趋势。在两器进入EDL 阶段前,通信链路保持稳定状态。进入火星大气后,信号出现较大起伏。经分析,接收信号功率的起伏主要受两器距离变化、黑障、降落伞和背罩分离引起的着陆巡视器大角度姿态变化、火星车接力后天线指向引起的信道变化影响等[15]。
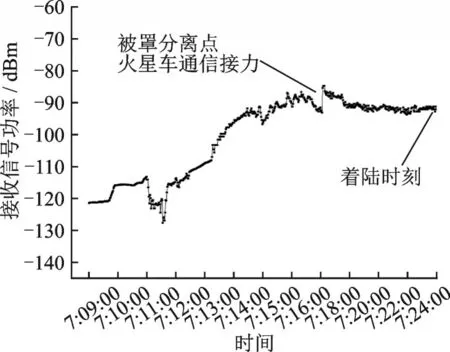
图15 EDL 段接收信号功率在轨实测结果Fig.15 Actual measurement results of received signal power in EDL stage
2021 年5 月17 日8 时15 分37 秒,环 绕 器 执 行第4 次近火制动进入中继通信轨道。2021 年5 月22 日10 时40 分,火星车安全驶离着陆平台至火星表面。根据实际在轨火星车行驶工作规划,考虑UHF 频段天线特点,每个火星日当地时刻14:00左右开展近火弧段UHF 中继通信工作,通信窗口时长约为8 min;远火弧段,根据任务安排择机选取1 h 进行UHF 中继通信。其中,7 月16 日~7 月28日间,由于环绕器过境窗口时长调整,中继数据下传受限,地面站接收数据量约为90 Mb/Sol,具体统计结果如图16 所示。
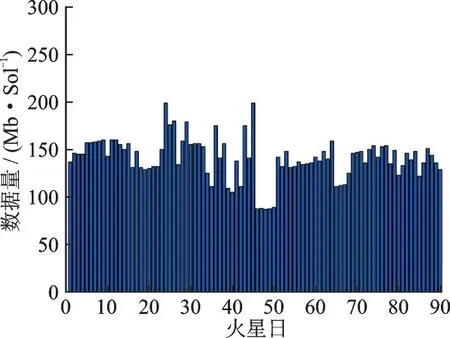
图16 寿命期内火星车UHF 频段返向传输数据量统计Fig.16 Statistics of the return transmission data of UHF band during the life period
国内外火星探测器中继通信能力比较如表2所示。通过对火面工作段返向传输数据量进行统计分析,“天问一号”火星探测器中继通信系统UHF 频段返向数据吞吐量约为150 Mb/Sol,高于美国Odyssey 火星探测器与欧空局MEX 火星探测器中继通信能力[16]。
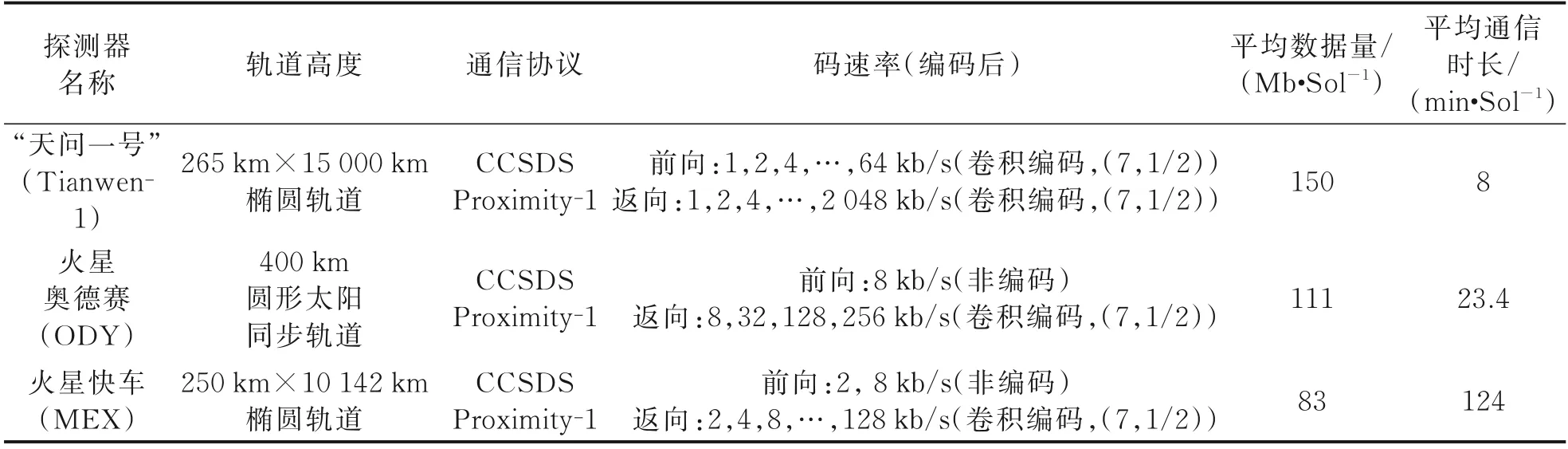
表2 国内外火星探测器中继通信能力比较Table 2 Comparison of relay communication capabilities of Mars probes
6 结 论
“天问一号”火星探测器UHF 频段中继通信系统在轨工作正常,圆满完成了中国首次火星探测任务工程目标。通过在轨飞行试验验证了火星探测UHF 频段体制下的中继通信方案设计正确性,也验证了远距离、长时延条件下深空探测全自主中继通信技术的良好性能,为中国后续深空探测任务中地外天体表面探测器中继通信系统设计与关键技术的发展提供了宝贵经验,为实现深空探测器高效、大容量中继通信奠定了坚实的技术基础。
猜你喜欢
电子设计工程(2022年24期)2022-12-23
现代工业经济和信息化(2022年9期)2022-11-03
应用科学学报(2020年6期)2021-01-04
环球时报(2020-07-24)2020-07-24
科学导报(2020年27期)2020-05-13
电加工与模具(2020年2期)2020-04-29
无线电通信技术(2019年1期)2019-12-24
河北大学学报(自然科学版)(2016年5期)2016-12-15
中国科技纵横(2016年14期)2016-10-10
航天器工程(2015年3期)2015-10-28