
华中数控系统HIO-1200E-M2型板卡参数配置及使用方法研究
2022-10-19 08:14:28韩明刚,袁亚
价值工程 2022年28期
1 HIO-1200E-M2板卡接口说明
HIO-1200E-M2组合板由HIO-1200E基板和HIO-1200-31的I/O扩展板组成,组成如表1所示。
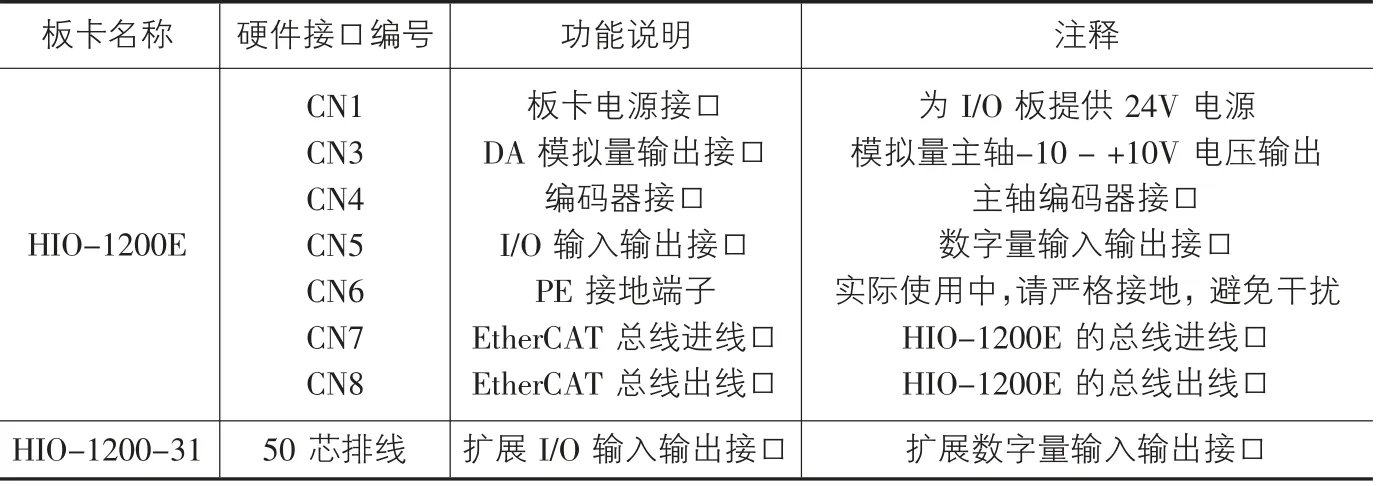
表1 HIO-1200E-M2组合板组成一览表
其中HIO-1200E底板,主要接口功能,包含如下:
CN3:一组模拟量主轴DA输出CN3,可以输出-10V-+10V电压或0-10V电(由设备参数主轴DA输出类型确定);
CN4:一个主轴编码器接口CN4;
CN5:一个数字量输入输出接口CN5,数字量输入输出接口,包含3组8Bit位 的输入量X0-X2,包含24个输入点;2组8Bit位的Y输出量Y0-Y1,包 含16个输出点。
扩展板HIO-1200-31是数字量输入输出扩展板,主要接口功能,包含如下:
50芯牌线:包含3组X输入量X3-X5,一共24个输入点;2组Y输出量Y2-Y3,一共16个输出点。
HIO-1200E-M2组合板卡的硬件外观,如图1。
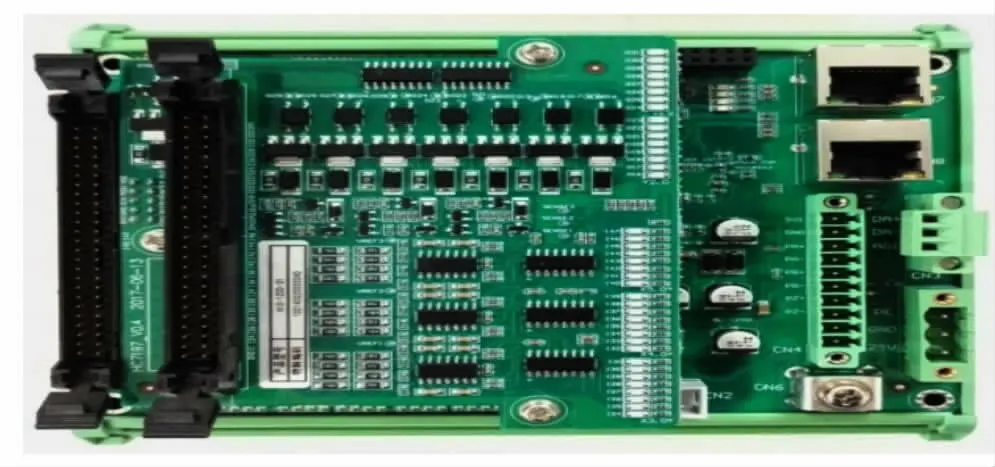
图1 组合板卡硬件外观图
下面对各个接口定义,分别说明如下:
①电源接口CN1。
CN1:电源接口,引脚定义如下:
使用方法:1脚接24V+;2脚接0V;3脚接PE地线。
②总线接口CN7、CN8。
CN7:EtherCAT总线进线口
CN8:EtherCAT总线出线口
③模拟量主轴接口CN3。
使用方法:其中主轴模拟量DA的输出为第一组IO_NET设备的Y10-Y11两组输出信号,共16位。
比如:在本配置中,DA模拟量主轴占用位为Y10、Y11两组,其中电压的正负符号位为Y11的最高位Y11.7。
相应参数配置,和普通车床模拟轴配置一致。主要需要注意的有两个参数:
【50X013】【主轴DA输出类型】【1】,0为0-+10V输出,1为-10V-+10V输出。【50X017】【主轴DA输出设备号】【7】,HIO-1200E的设备号一致。
④编码器反馈接口CN4引脚如表2。
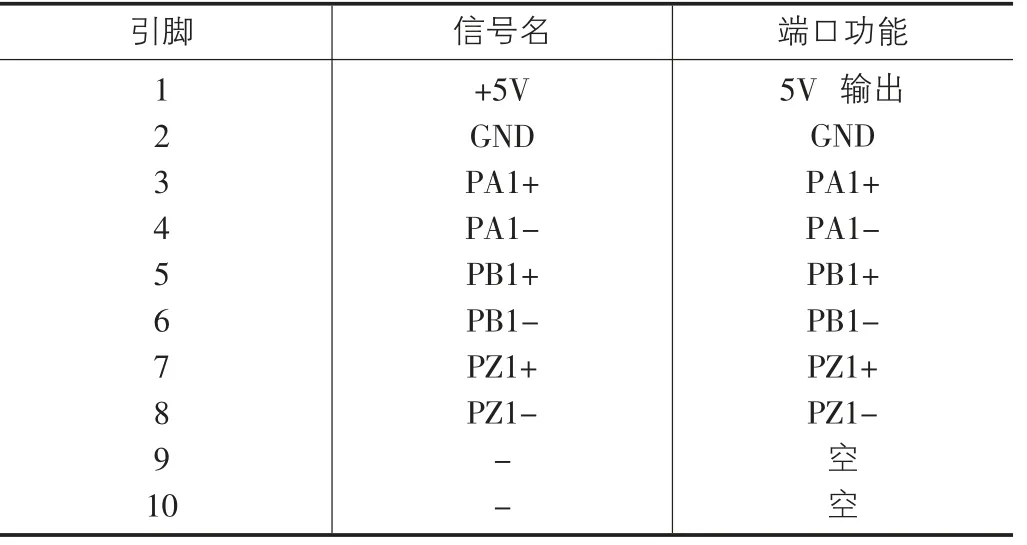
表2 CN4引脚一览表
注意事项:其中编码器反馈接口,占IO_NET设备的X10-X13共4组输入信号,比如:在本测试台的配置中,编码器反馈接口,占用位为X10、X11、X12、X13四组信号。
其中,为了让界面显示出主轴转速,需要注意参数是:
【50X016】【主轴编码器反馈设备号】【7】,HIO-1200的设备号一致,在本例中为7。(X代表的是系统识别出的主轴设备号,测试台上X为4)
⑤数字量输入输出点定义如表3。
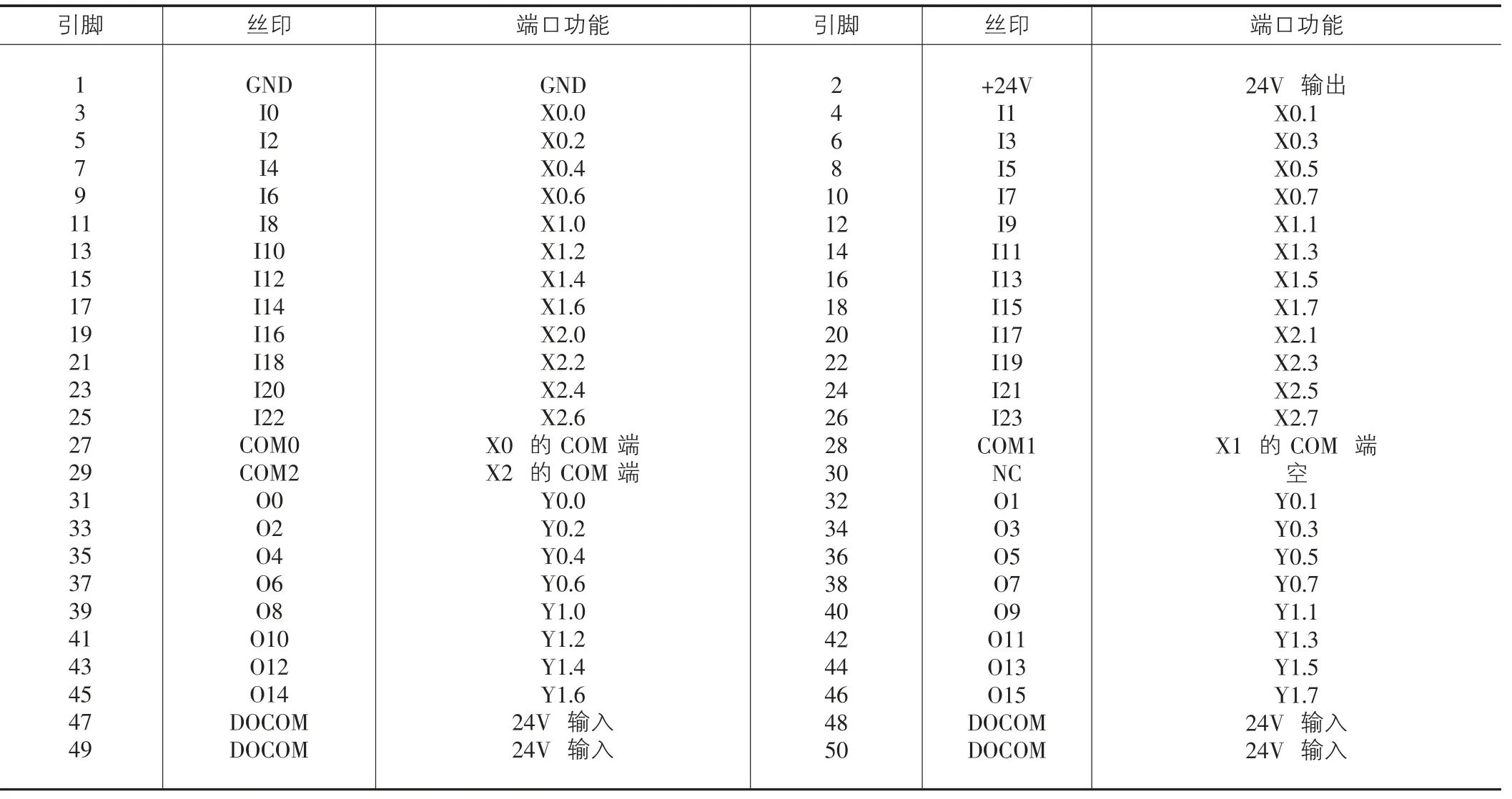
表3 CN5数字量输入/输出接口一览表
引脚说明:
Pin 1、2:24V电源输出,供输入端回路使用。一般情况下,可以不接线。Pin3-26:开关量输入信号X,分为3组,一共24个信号,可以自己配置成PNP或NPN。Pin27-30:开关量输入信号X的模式配置,端口COM 0悬空或者接地,可配置X0.0-X0.7为PNP型输入;如果端口COM 0接+24V,则可配置X0.0-X0.7为NPN型输入。同理COM1-COM5,可配置X1-X5的输入模式。
Pin31-46:开关量输出信号Y(PNP型),分为2组共16个信号为PNP型输出,需要配合Pin47-50脚使用。注意:使用前Pin47-50必须接24V电源作为公共端。
Pin47-50:外接独立24V电源,供输出端回路使用,使用输出量Y时,必须给其提供一个+24V电压,否则Y输出时继电器线圈不会动作。
2 硬件配置以及参数PLC的修改
下面以测试台为例,对HIO-1200E-M2板卡的参数配置和使用过程,做出说明:
①硬件连线配置:使用HIO-1200E-M2时,将系统IPC的EtherCAT总线接口,使用网线连接到HIO-1200EM2的CN7输入IN接口,再通过板卡上的CN8输出OUT接口,连接到下一个EtherCAT设备的IN接口。注意:EtherCAT总线协议,设备连接是不需要像NCUC总线那样形成环状回路的。
②设备接口参数配置:通过HIO-1200E-M2板卡的CN7接口,完成连接总线以后,如果总线连接正常,板卡上的CN7接口,会出现信号灯的闪烁。然后,我们将NC系统的菜单切换到设备配置菜单,查看系统的设备配置图,系统会识别出一个新的IO_NET设备如图2。

图2 在测试平台上识别出的一个IO_NET设备为【#7】组
注意事项:1200E板卡的硬件识别,对比于HIO-1200板卡的区别在于,HIO-1200会识别出两个硬件设备,而1200E只会识别出一个硬件设备。但是HIO-1200E板HIO-1200板卡一样,总占用的IO组地址的总数量,仍然8Bit位的20组输入输出。
然后将NC系统界面切换到【设备接口参数】,配置#7号IO设备的参数。
关键参数配置如下:
参数【50X012】【输入点起始组号】配置为0;
参数【50X013】【输入点组数】配置成20;[注意,偏移量是20,不是10];
参数【50X014】【输出点起始组号】配置为0;
参数【50X015】【输出点组数】配置成20;[注意,偏移量是20,不是10];
参数【50X016】【编码器A类型】按照实际编码器类型,配置成1;
参数【50X017】【编码器A每转脉冲数】按照实际脉冲数1024,乘以4倍频以后填入值配置成1024×4=4096。
③模拟主轴参数配置。
由于在华中HNC系统的主轴是4号设备,
其中,主要的关键参数配置如下:参数【50X010】【工作模式】配置为3;
参数【50X011】【逻辑轴号】按实际对应轴号配置,这里配置成5;
参数【50X012】【编码器反馈取反标志】按实际配置,这里配置为0;
参数【50X013】【主轴DA输出类型】按实际配置,0为0-+10V,1为-10+10V;
参数【50X014】【主轴DA零漂调整】用于抵消浮电压零漂,按实际测量值填写;
参数【50X015】【反馈位置循环脉冲数】按编码器线数,4倍频后填写;
参数【50X016】【主轴编码器反馈设备号】按IO板识别出的硬件号填写为7;
参数【50X017】【主轴DA输出设备号】按IO板识别出的硬件号填写为7;
参数【50X018】【主轴编码器反馈输出接口】无影响,默认值0或其它值都可;
参数【50X019】【主轴DA输出端口号】DA输出为Y10-Y11,2个8Bit位一组,所以这里填5。
④机床PLC梯形图修改。
HIO-1200E-M2由于采用了EtherCAT总线通讯协议,所以在PLC程序中,不需要加入看门狗指令。也就是不需要MOV【X9】【Y9】,或者MOV【X19】【Y19】指令模块。所以,只需要在梯形图中加入SPDA指令和正确设置用户参数P50-P54,就可以实现模拟主轴的功能。
⑤硬件连接完成,参数配置完成以后,第一:需要观察系统有无总线连接不正常报警;第二:观察HIO-1200E上,EtherCAT口的总线数据交换指示灯,是否交换闪烁;第三:查看数控系统的【设备配置】菜单界面,是否识别出新的IO硬件设备;以上三点全部满足,才证明HIO-1200E板卡成功接入系统。
3 关于HIO-1200E-M2在使用中常见问题,以及注意的事项
①输入点X为可以选择配置成PNP和NPN规格。其中,Pin-27、28、29引脚悬空或者接地的时候,输入点为PNP型,外部输入的有效触发电压为高电平有效,触发输入信号为+24V。当将27、28、29外接+24V电源的时候,则输入点配置为NPN型,其外部的有效出发电压为低电平有效,触发信号为0V。这一点在配置和实际使用中根据现场电气输入元件的实际情况,注意选择使用。并且注意每一组输入的规格,是分开控制的,针脚Pin-27控制X0组输入,针脚Pin-28控制X1组输入,针脚Pin-29控制X2组输入。
②Y输出为PNP型输出,在使用中,需要先将Pin-47、48、49、50的DC COM接入一个+24V电源,给输出模块回路供电。注意,此时,继电器的控制接线方式应该为,继电器需要一个0V电源作为公共端,接到继电器的负极13脚上,而每个继电器的正极14脚,则接到HIO-1200E模块上,需要控制的是输出点Y的Pin引脚。
③其中主轴模拟量DA的输出地址为IO_NET设备的Y10-Y11两组8Bit位的Y输出,一共16位,在本配置中为Y10Y11两组,其中正负符号位为Y11的最高位Y11.7。其中NC系统中的相应参数配置,和普通车床模拟轴配置一致。
④编码器接口CN4,占用的为输入量的IO_NET设备的X10-X13一共4组X输入信号。
注意:当没有连接编码器的时候,这四组输入信号中有的个别点位会有输入信号存在,这是模块本身存在的点位输入,属于正常现象。
猜你喜欢
装备制造技术(2019年12期)2019-12-25 03:06:34
铁道通信信号(2019年3期)2019-04-25 03:00:44
测控技术(2018年3期)2018-11-25 09:45:46
测控技术(2018年12期)2018-11-25 09:37:42
校园英语·中旬(2017年10期)2017-11-20 09:35:11
吉林省教育学院学报(2017年3期)2017-05-31 16:03:51
电子制作(2016年21期)2016-05-17 03:53:12
火控雷达技术(2016年3期)2016-02-06 02:30:33
电测与仪表(2015年11期)2015-04-09 11:46:30
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:49
