
双三相永磁同步电机的双矢量模型预测转矩控制
2022-10-17 14:04宋文祥任航杨煜吕洪章
电机与控制学报 2022年9期
宋文祥, 任航, 杨煜, 吕洪章
(1.上海大学 机电工程与自动化学院,上海 200444;2.青岛威控电气有限公司,山东 青岛 266000)
0 引 言
随着电机调速领域的飞跃发展,由于多相电机具有低压大功率输出、容错能力强的特点,受到了广泛关注。特别是在船舶推进、电动汽车、轨道交通等领域,多相电机具有广阔的应用前景[1-3]。其中,双三相永磁同步电机(dual three phase PMSM,DTP-PMSM)的静态、动态性能优良,具有转矩密度高、转矩脉动小和容错能力强等诸多优点。DTP-PMSM及其调速传动系统成为国内外研究的热点之一[4-6]。
DTP-PMSM的控制方法目前主要为空间矢量控制和直接转矩控制。空间矢量控制主要基于矢量空间解耦模型,将其解耦为三个子平面,通过αβ子平面和z1z2子平面对电流进行控制,其中αβ子平面按照传统三相电机控制方式,z1z2子平面采用电流给定为0进行控制,该方法需要4个PI调节器,故参数整定困难,而且对于六相逆变器共有64个电压矢量,若采用单矢量SVPWM会造成较大的谐波电流,采用双矢量或四矢量时,调制算法复杂,难度进一步提高[7-9]。直接转矩控制策略以其结构简单、瞬态响应快等优点,是目前主要的三相电力传动系统控制技术之一。对于双三相电机而言,文献[10]采用修正的电压矢量,通过查询开关表选择合适的电压矢量,达到减低谐波电流的目的。为了提高转矩的稳态性能,文献[11-12]增加占空比控制实现性能提升。然而直接转矩控制本身也存在一个固有的问题,在利用开关表选择电压矢量时,所在区域对应的电压矢量未必是最优电压矢量,甚至是无效的[13],造成转矩和磁链波动大的结果。所以,在此引入模型预测控制。
模型预测控制具有易于处理多变量、结构简单、动态响应迅速等诸多优点受到众多学者关注。针对模型预测控制应用于多相电机中所遇到问题,主要体现在两方面。一方面是随着可选电压矢量的增多,使得模型预测的计算负担大幅增加,减小计算量,精确选择电压矢量是一个研究热点。另一方面,由于双三相电机谐波子平面具有很小的阻抗,能引起较大的谐波电流,将模型预测控制与谐波电流抑制相结合是一个研究问题。文献[14-15]首次将模型预测控制方法应用于双三相感应电机,对比分析了不同的价值函数、预测矢量的个数和系统采样频率对电机的影响,得出该方法具有良好的性能,并在此基础上,通过增加零矢量,改变调制方式实现增强电流控制和固定开关频率的目的,以上方法都要采用基波电流和谐波电流之和作为价值函数,价值函数过于繁琐,同时未能关注转矩和磁链的波动情况。文献[16]采用模型预测直接转矩控制方法,通过优化开关表,减少预测矢量的个数,实现抑制谐波电流和降低运算量的目的,这种方法需要同时观测基波子平面和谐波子平面的磁链,磁链位置的准确性影响了谐波电流的抑制。文献[17]在价值函数方面具有创新性,仅将谐波电流作为评价指标,以简洁的价值函数选择出最优的电压矢量,在谐波电流抑制上取得了一定的效果,然而采用无差拍直接转矩和磁链控制的计算过程略微复杂。文献[18-19]提出了基于虚拟电压矢量的模型预测电流控制,通过利用虚拟电压矢量实现谐波电流的抑制,最终取得了良好的抑制效果,但未对转矩、磁链波动进行进一步研究。
为了抑制DTP-PMSM的谐波电流,并减小转矩和磁链波动。本文提出一种双矢量模型预测转矩控制策略,利用最外围大矢量和次外围中矢量在αβ子平面方向相同,但在z1z2子平面方向相反的特点,选择两个矢量作用于电机,根据定子磁链所在位置,将12个预测电压矢量减少至4个,通过价值函数选出最优的一组电压矢量对电机系统进行控制。仿真和实验结果表明,该方法能够抑制谐波电流,具有更好的转矩和磁链控制性能。
1 双三相永磁同步电机数学模型
图1所示为DTP-PMSM的结构图,包含两套中性点相互隔离的三相对称绕组,两套绕组采用Y型连接,按照互差30°电角度的方式放置。

图1 双三相永磁同步电机结构
DTP-PMSM是一个高阶、非线性系统,通过矢量空间解耦方法,利用矢量空间解耦变换(vector space decomposition,VSD)将6维空间分解为三个相互正交的子平面[20],分别为αβ子平面、z1z2子平面、o1o2子平面,其中αβ子平面为基波子平面,包含基波分量和12n±1(n=1,2,3…)次谐波分量,z1z2子平面为谐波子平面,包含6n±1(n=1,3,5…)次谐波,该平面分量不对气隙磁通和转矩做贡献,o1o2子平面为零序子平面,包含的谐波次数为6n±3(n=1,3,5…),由于两套绕组中性点相互隔离,不产生零序电流,所以在控制时不考虑该子平面情况。
矢量空间解耦变换如下:
(1)
由于仅αβ子平面进行了机电能量转换,所以只对αβ子平面进行同步旋转变换,变换矩阵为
(2)
式中:θ为转子位置角度;I4为4阶单位矩阵。
同步旋转坐标系下的αβ子平面数学模型为:
(3)
(4)
z1z2子平面的数学模型为:
(5)
(6)
电磁转矩方程为
Te=3pn(iqψd-idψq)。
(7)

2 传统直接转矩控制
双三相电机直接转矩控制(direct torque control,DTC)采用滞环比较器,通过定子磁链的位置和转矩、磁链的误差离线计算开关表,从而保持磁链幅值不变以及快速响应转矩变化。与三相电机DTC方法不同的是,六相逆变器为双三相电机提供了丰富的电压矢量资源,需选择合适的电压矢量作为开关表的备选电压矢量。
将双三相电机电压矢量分为12扇区,如图2所示,根据αβ子平面电压矢量的幅值大小,可将其分为4组,分别为vmax、vmidL、vmids、vmin,幅值|vmax|=0.644Udc,|vmidL|=0.471Udc,|vmids|=0.333Udc,|vmin|=0.173Udc。考虑到vmax组的矢量在基波子平面幅值最大,具有直流母线电压利用率高、转矩响应快、且谐波子平面的幅值最小的优点,选择vmax组的矢量作为开关表的备选电压矢量。

图2 双三相电机电压矢量图
表1给出了双三相永磁电机传统DTC第一扇区的开关表,其中τ表示转矩增减,φ表示磁链增减。1表示增加,-1为减小,0为保持不变。当定子磁链位于Ⅰ扇区时,此时若同时增大转矩、磁链,选择电压矢量v66作用于电机。同理,若要减小转矩和磁链,即选择电压矢量v11。当转矩达到给定附近时,为保证其波动尽量小,此时可选择零电压矢量v00以减小转矩波动。其余扇区同理可推导得。

表1 DTC电压矢量开关表(扇区Ⅰ)
定子磁链位置观测采用静止坐标系下的磁链方程,利用定子电流iα、iβ以及转子位置对磁链观测,即
(8)

(9)
θψ=arctan(ψβ/ψα)。
(10)
3 双矢量模型预测转矩控制
3.1 预测模型
传统的DTC中,开关表只采用了vmax组的大矢量,未考虑谐波子平面的控制情况,所以必然会带来较大的谐波电流。同时采用开关表查询的控制方法较为粗略,所选出的电压矢量未必是满足磁链和转矩响应的最优选择,存在较大的转矩、磁链波动。因此,本文提出双矢量模型预测转矩控制(two vectors model predictive torque control,TV-MPTC),采用两个电压矢量作为预测电压矢量,通过输入当前时刻电流值与预测矢量,以磁链和转矩误差作为价值函数,利用价值函数在线寻优,选出使价值函数最小的电压矢量作为最优电压矢量。该方法可以抑制谐波电流,选择的电压矢量为最优矢量,提升了转矩和磁链响应的快速性和准确性。
首先,将式(3)改写成下式:
(11)
对式(11)进行一阶欧拉离散化可得:
(12)

(13)
(14)
(15)
3.2 预测电压矢量控制集
如图2所示,vmax组的矢量和vmidL组的矢量在αβ子平面上方向一致,但在z1z2子平面的方向相反。根据这两组矢量的特点,在一个控制周期,选择两个电压矢量,如v44和v65。再分配一个合适的作用时间,将它们作用于电机,等效于在一个控制周期作用了一个新矢量。新矢量在αβ子平面和z1z2子平面的幅值计算满足下式[10]:
(16)
令|vz1z2| =0,即
(17)
通过上式可知,在一个周期大矢量vmax作用时间为0.731Ts,中矢量vmidL作用时间为0.269Ts,可等效为在αβ子平面幅值为0.596Udc,z1z2子平面的幅值为0的合成矢量,实现谐波电流抑制。为方便表示,将双电压矢量表示为合成电压矢量,如(v44,v65)表示为V1,其余以此类推,合成后的电压矢量图如图3所示。

图3 合成电压矢量
TV-MPTC将合成后的电压矢量作为预测电压矢量控制集,然而选取12个预测电压矢量代入预测模型进行迭代计算,相比64个电压矢量,预测矢量已减少许多,但对于系统总的运算量依然较大,需要较久的计算时间。为进一步降低运算量,减少计算时间,通过对定子磁链位置观测,将12个预测电压矢量减少至4个。
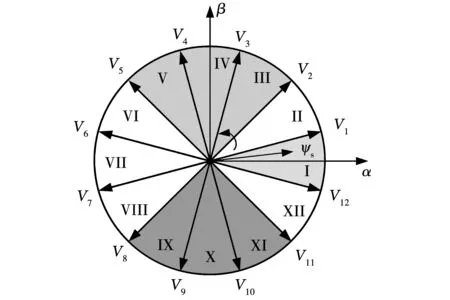
图4 预测电压矢量选择

表2 TV-MPTC双电压矢量控制集
3.3 价值函数
定义转矩和磁链的跟踪误差为价值函数,即
(18)

通常按照转矩和磁链具有相同权重的原则进行在线寻优,在此增加权重系数调节转矩和磁链之间的比重,实现选取最优电压矢量的目的。
3.4 TV-MPTC和DTC对比
双三相电机DTC与TV-MPTC的不同之处主要体现在两点:一、作用的电压矢量不同,DTC采用最外围大矢量作为开关表备选电压矢量,未对谐波电流进行抑制,TV-MPTC将双电压矢量作为预测电压矢量,可以抑制谐波电流;二、选取电压矢量的方式不同,DTC通过查询开关表的方法,作用电机的电压矢量未必是最优矢量,方式粗略,会导致较大的转矩、磁链波动,TV-MPTC利用价值函数在线寻优,选择最优的电压矢量作用电机,可具有更好的电机控制性能。


表3 不同方法的电压矢量选取对比
双矢量模型预测转矩系统控制框图如图5所示,控制方法如下:

图5 双矢量模型预测转矩控制系统框图
1)转速控制采用比例积分控制器(proportional integral controller,PI),得到给定转矩。

4)利用价值函数式(18)在线寻优计算,价值函数最小的电压矢量作为最优电压矢量,将其开关序列发送给逆变器,实现电机运行。
4 仿真与实验
4.1 仿真研究


表4 双三相永磁同步电机参数
图6所示为转速逐次阶跃给定的电机起动相关波形,电机在空载下运行,每经过0.3 s转速给定增加300 r/min,转速最终达到1 200 r/min。从图中可以看出,随着转速变化,DTC和TV-DTC的转矩波动并不一致,波动较大,而TV-MPTC的转矩波动一致,具有更小的转矩波动,此外,随着转速的提升,DTC、TV-DTC的转矩波形在电机转速上升运行中出现下降趋势,TV-MPTC的转矩变化稳定。磁链方面,TV-MPTC的磁链控制效果最好。说明直接转矩控制方法采用开关表查询电压矢量的方法较为粗略,对转矩、磁链控制不够精确,TV-MPTC采用预测转矩和磁链的方式,通过价值函数选出最优电压矢量,对转矩、磁链具有更好的控制效果。

图6 转速逐次阶跃给定的电机起动相关波形
图7是双三相电机在带载状态下,转速从200 r/min上升到600 r/min的动态转速、电流波形,转速变化前后的负载为10 N·m和25 N·m。可以看出,DTC由于谐波电流的原因,其相电流波形畸变严重。TV-MPTC在三种控制算法当中,谐波电流最小,所提算法有效抑制了谐波电流。
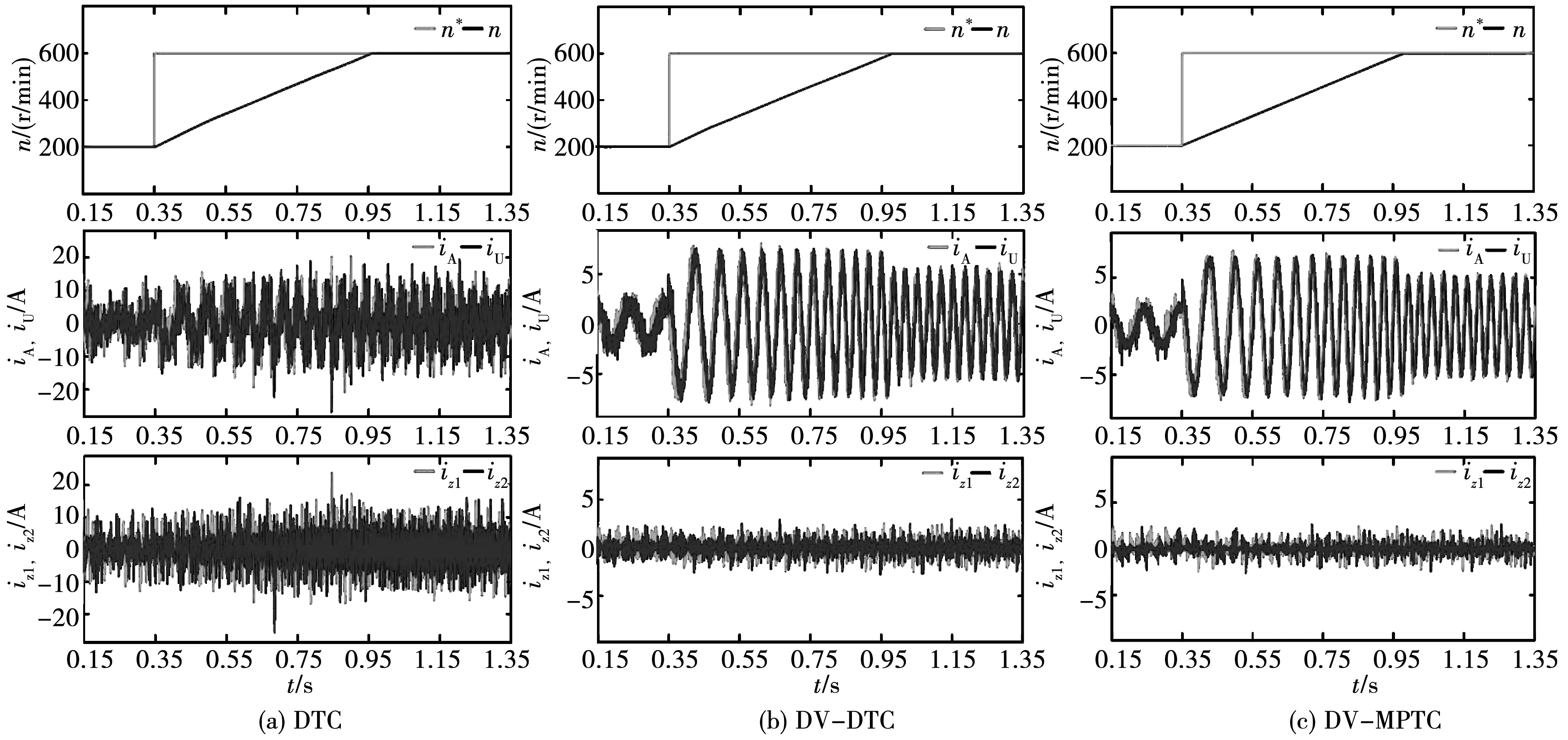
图7 转速给定阶跃变化的转速和相关电流波形
图8为转速在600 r/min,带80%额定负载状况下的电机稳态电流波形。其中,DTC的相电流波形畸变严重,幅值达到20 A,采用双电压矢量的TV-DTC与TV-MPTC的相电流波形正常,谐波电流得到抑制。对比双三相电机的基波电流iα、iβ和相电流的THD结果,TV-MPTC的控制性能最优。

图8 带载稳态运行的相关电流波形
4.2 实验研究
本文进一步地对DTC、TV-DTC、TV-MPTC进行了实验研究,实验所用双三相永磁同步电机参数如表4所示,对接一台直流电机作为负载。控制系统采用的微处理器为TMS320F2812,系统采样频率7.5 kHz,直流母线电压310 V,双三相永磁同步电机控制系统实验平台如图9所示。
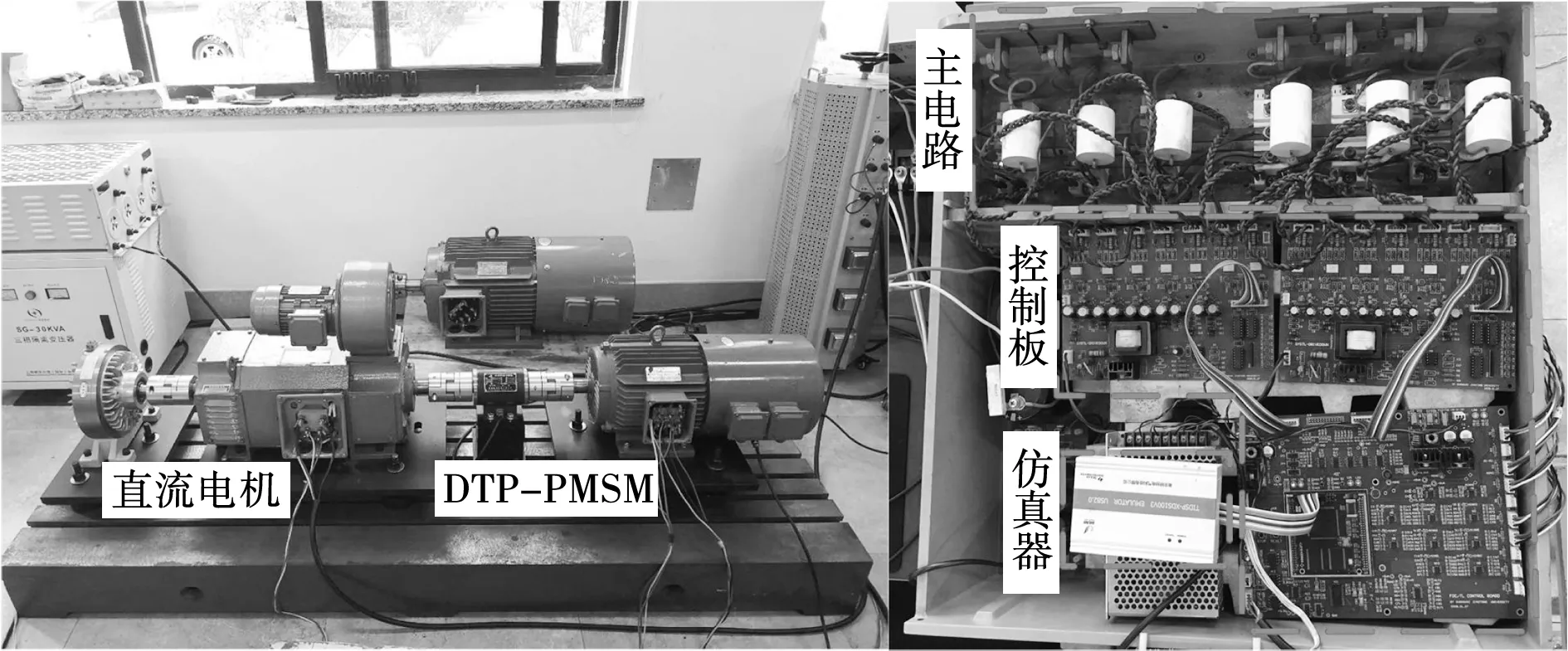
图9 实验系统配置
图10给出了空载和带载情况下,三种控制方法的电流运行结果,从上至下分别为负载突变时相电流与谐波电流、空载情况下相电流与谐波电流、带载情况下相电流与基波电流。其中,双三相电机转速运行在600 r/min,负载转矩为额定转矩的80%。从图中可以看出,由于谐波电流的原因,在空载情况下采用DTC的相电流,其峰值达到20 A,接近于额定电流3倍,且在负载突增的前后未有明显变化。在实际运行中,观察到电机噪声和发热现象明显。而采用TV-DTC和TV-MPTC的谐波电流明显降低,采用双电压矢量控制方法可有效抑制谐波电流。对比基波电流分量iα、iβ波形可知,DTC的基波电流畸变严重,双三相电机工作不平稳,TV-DTC与TV-MPTC都采用双电压矢量控制电机,而TV-MPTC的基波电流效果更好,这体现了模型预测转矩控制在选择工作电压矢量方面的准确性和优越性。
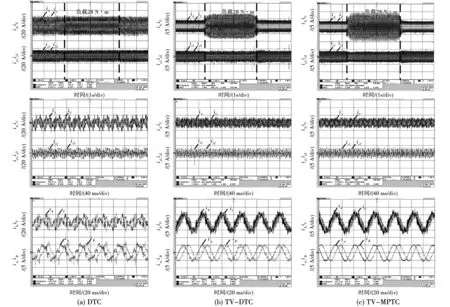
图10 空载与带载情况下的双三相电机电流运行结果
图11为双三相电机运行在600 r/min,带80%额定转矩的稳态运行结果,从上至下分别为转矩、磁链运行结果和磁链轨迹。由转矩和磁链运行结果可知,双三相电机的DTC稳态性能较差,转矩波动10 N·m,DTC对基波子平面的物理量控制较差。TV-DTC和TV-MPTC具有良好的带载能力,且TV-MPTC的转矩波动最小。磁链轨迹的数据是双三相电机稳态运行时,采集100 ms的ψα、ψβ绘制而成。可以看出,TV-MPTC的磁链轨迹圆形度最好,曲线平滑,控制效果优良。

图11 双三相电机带载稳态运行
图12为转速从200 r/min到600 r/min阶跃变化的带载运行结果,转速变化前后负载为10 N·m和25 N·m。在系统响应快速性方面,DTC与DV-DTC快于TV-MPTC,原因在于直接转矩控制以响应速度为目标,模型预测控制兼顾转矩和磁链两者的控制效果。在转速波动方面,TV-MPTC的转速上升曲线波动更小,体现了模型预测控制的优越性。

图12 双三相电机给定转速阶跃变化运行
5 结 论
本文深入研究了DTP-PMSM驱动系统的直接转矩控制策略,通过对比分析已有的传统控制方案,提出了一种双矢量模型预测转矩控制策略,并通过仿真与实验研究验证了该方法的有效性。得出有关结论如下:
1)由于z1z2子平面的阻抗较小,仅采用最外大矢量的传统直接控制策略依然会引起较大的谐波电流,因此需要通过改变作用的电压矢量以降低谐波电流。
2)通过采用双矢量控制策略,增选次外围电压矢量,并合理分配两个电压矢量的作用时间,可以使得谐波子平面的平均电压幅值为零,有效地降低了双三相电机的谐波电流。
3)双矢量模型预测转矩控制根据预测模型计算下一时刻的转矩和磁链值,利用价值函数在线寻优选择最优电压矢量,避免了直接转矩控制策略存在的选择电压矢量不准确的情况,从而减小了电机转矩和磁链波动,具有实现方便、控制效果好的特点,是一种值得进一步研究的双三相永磁同步电机高性能控制方案。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
导航定位学报(2022年4期)2022-08-15
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
防爆电机(2022年1期)2022-02-16
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
电机与控制学报(2018年9期)2018-05-14
