半主动油气悬架最佳阻尼比确定方法
2022-10-12 08:26王聪姚胜华黄兵锋
湖北汽车工业学院学报 2022年3期
王聪,姚胜华,黄兵锋
(湖北汽车工业学院 汽车工程学院,湖北 十堰 442002)
半主动悬架由于性能功耗比高、结构简单、可靠性高、成本低,受到学者和汽车厂商的广泛关注,是目前悬架研究的热点[1-4],主要集中在减振器阻尼结构设计和控制算法设计[5]。半主动悬架控制典型算法主要有基于门限值的天棚阻尼控制、基于经典控制理论的PID控制、基于现代控制理论的最优控制、基于智能控制的神经网络控制、结合各种算法的复合控制等[6-7]。天棚控制算法简单,但不能得到最佳控制效果[8];PID 控制的不足之处是对被控对象参数敏感,由于悬架的非线性和时变特性,传统PID 控制难以达到理想效果,通常结合模糊控制、神经网络等算法进行动态调参,但算法复杂,调参工作量大[7-10]。文献[11]在高机动越野平台上开发出阻尼连续可调的油气弹簧,设计了基于滑模控制的悬架控制算法;文献[7]提出基于舒适性和安全性的最佳阻尼比控制规律,根据不同车速、不同路况调节悬架系统阻尼比;文献[12]将最佳阻尼比控制律与天棚阻尼控制策略进行对比,表明最佳阻尼比控制策略可作为汽车半主动悬架控制的有益参考,算法简单,适应的车速和路况范围广。上述文献提出的控制算法,大多是在某车速和某路况下进行研究的。文中将最佳阻尼比控制策略用于双向阻尼连续可调油气弹簧悬架进行研究。
1 油气弹簧数字模型
油气弹簧主要由蓄能器、比例溢流电磁阀、单向阀、卸荷阀和传感器等组成,如图1所示,通过油路设计采用1 个比例溢流电磁阀连续改变压缩和伸张行程的溢流压力,实现双向阻尼连续可调[11]。油气弹簧冲击过大时,2 个卸荷阀及时卸荷,起到保护油气弹簧的作用。活塞往上运动即弹簧的压缩行程,无杆腔压力增大,油液从无杆腔通过单向阀9流入有杆腔,有杆腔油液通过比例电磁阀流入蓄能器,同时无杆腔油液通过节流阀4 流入底阀腔,再流入蓄能器。活塞往下运动即弹簧的伸张行程,无杆腔压力减小,此时底阀腔油液通过单向阀5流入无杆腔,有杆腔油液通过比例电磁阀流入底阀腔,同时通过节流阀10流入无杆腔。
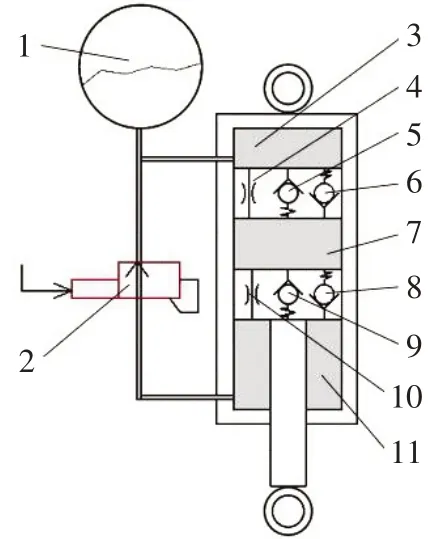
图1 油气弹簧液压结构示意图
油气弹簧单元力Fzsi和油气悬架动态弹性力Fksi计算公式[13]为
式中:i取1、2、3、4 分别为左前、右前、左后和右后车轮;msi为对应车轮的等效簧载质量;A为油缸活塞有效作用面积;ji为悬架杠杆比;p0和V0分别为油气悬架工作气室的初始压力和总容积;r为气体多变指数;g为重力加速度;zui、zsi分别为簧载质量和非簧载质量的垂向位移。
油气悬架阻尼力Fcsi和可控阻尼力Fdi为

式中:csi为可控阻尼之外的基本阻尼系数;żui、żsi分别为簧载质量和非簧载质量的垂向速度;cdoi为半主动悬架最佳阻尼匹配的减振器的阻尼系数。
2 控制策略
2.1 最佳阻尼比控制策略
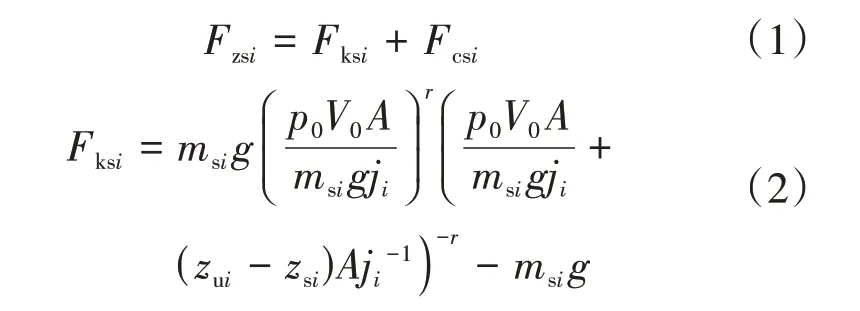
根据车身和车轮二自由度振动系统微分方程,通过拉普拉斯变换可得车身垂直振动加速度z̈、车轮动载荷Fd和悬架动挠度fd的均方值响应解析式[7,12]:
式中:Gq(n0)为路面不平度系数;n0为参考空间频率,取0.1 m-1;Vx为车速;rm和rk分别为质量比和刚度比;ms和mu分别为单轮簧上质量和簧下质量;ks和kt分别为弹簧刚度和车轮刚度;ω0为固有圆频率;ξ为阻尼比。根据式(5)和式(7)建立优化设计目标函数,以fd为约束条件:
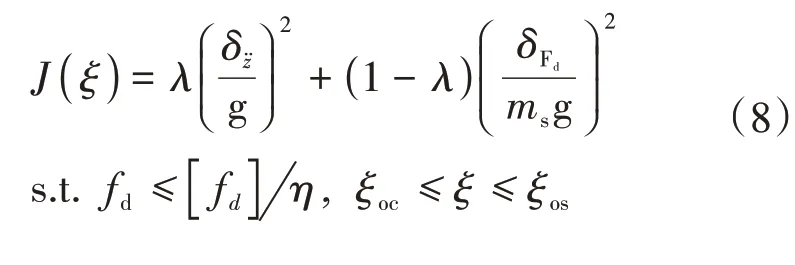
式中:λ为加权系数;[fd]为悬架动扰度限位行程。假设限制悬架撞击限位的概率不大于30%,则约束条件取1/3[fd],即η为3;ξoc为基于舒适性的最佳阻尼比;ξos为基于安全性的最佳阻尼比。

由式(9)可得不同车速不同路况下的悬架最佳阻尼比控制曲面,如图2 所示。ξoi随Vx和Gq(n0)变化,最大为ξosi,最小为ξoci。汽车在良好路面上行驶时,为保证乘坐舒适性,悬架阻尼比调节为ξoci;在较差路面上行驶时,为保证行驶安全性,悬架阻尼比调节为ξosi;在中等路面上行驶时,在保证悬架动挠度的前提下,调节阻尼比,使安全性与舒适性达到最好的折中状态[7,12]。
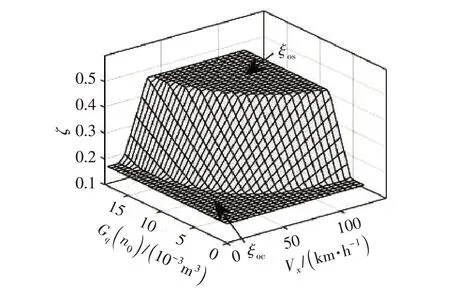
图2 悬架最佳阻尼比随车速和路面的变化曲面
考虑油气弹簧的安装角度αi和ji,半主动悬架最佳减振器的阻尼系数为
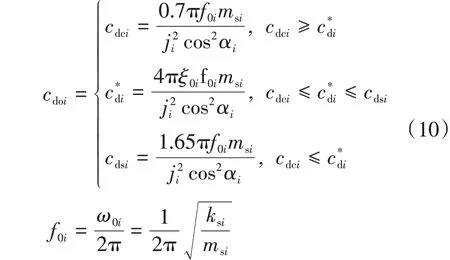
式中:cdci为悬架系统最舒适时减振器的阻尼系数;cdsi为悬架系统最安全时减振器的阻尼系数;f0i为悬架固有频率。
2.2 PID控制策略
半主动油气悬架PID控制,以z̈为目标,以实际值ddv_s 与预设值的差值e作为PID 控制器输入,分别设计PID控制器来进行比例、积分、微分运算。期望车身垂直加速度为0 m·s-¹,可调的悬架单元力Fzsi作为PID控制的控制量,见图3。采用试凑法来确定PID 控制参数,先调节比例系数Kp,后调节积分系数Ki,最后调节微分系数Kd,同时观察悬架动态响应。经反复调整,Kp取120,Ki取1,Kd取0.1。
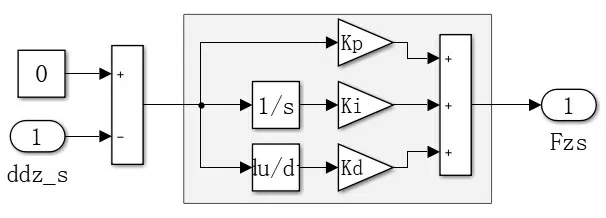
图3 PID控制器
3 TruckSim/Simulink联合仿真
3.1 道路模型建立
在TruckSim 中建立Off-Road/City Loop(越野道路/城市铺装道路)进行仿真,道路总里程为1315 m,如图4a 所示。越野路面按顺时针方向由点c到点e,相当C~E路面等级,长度739 m,仿真车速为35 km·h-¹;铺装路面按顺时针方由点e到点c,相当A~B 路面等级,长度为576 m,仿真车速为110 km·h-¹。道路路面激励q随里程s变化见图4b。
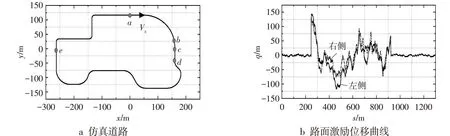
图4 Off-Road/City Loop道路及其路面激励位移曲线
3.2 控制策略验证和仿真对比
为提高仿真模型精度,在TruckSim 中搭建整车仿真模型,整车部分参数见表1。
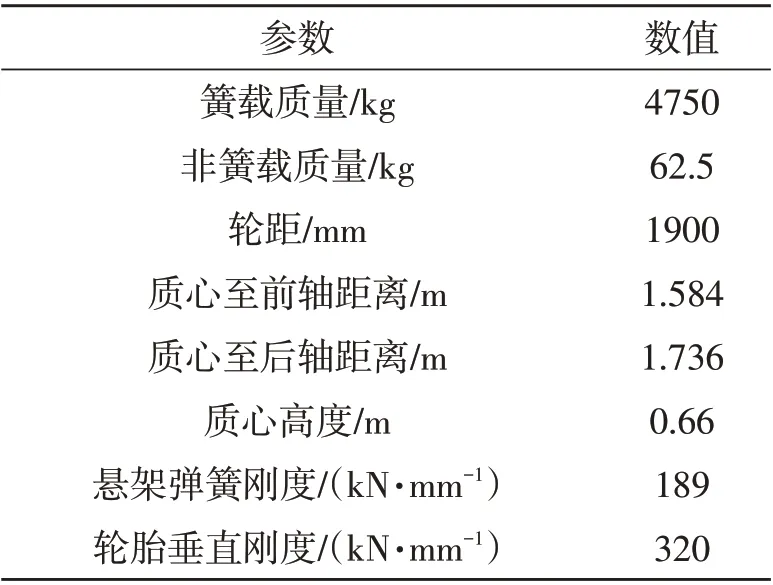
表1 整车部分参数表
在Simulink 中采用MATLAB Function 编写最佳阻尼系数对应的Fdi和Fksi计算模块,输入为Vx、路面不平度Z_Profile 和簧载质量垂向速度dz_s;2 个计算模块之和为Fzsi,对应IMP_FD_L1、IMP_FD_L2和IMP_FD_R1、IMP_FD_R2,如图5 所示。在Simu link中建立PID控制仿真模型,如图6所示。
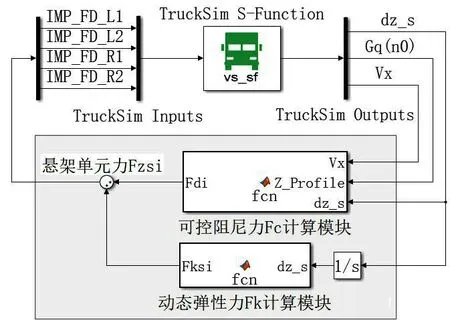
图5 最佳阻尼比控制仿真模型
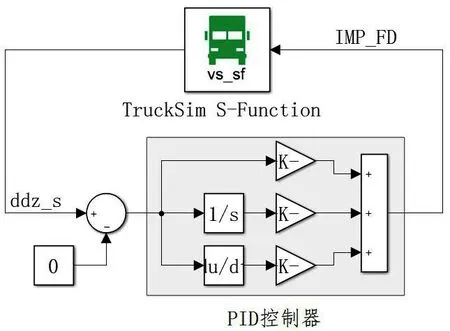
图6 PID控制仿真模型
最佳阻尼比控制与PID 控制半主动悬架和无控制被动悬架相比,无论在铺装路面或越野路面,z̈、Fd和fd相应曲线的峰值均有下降,如图7 所示。因篇幅有限,仅给出0~150 m数据(图4a点b~d),前50 m为铺装路面(图4a中点b~c),后100 m为越野路面(图4a中点c~d)。
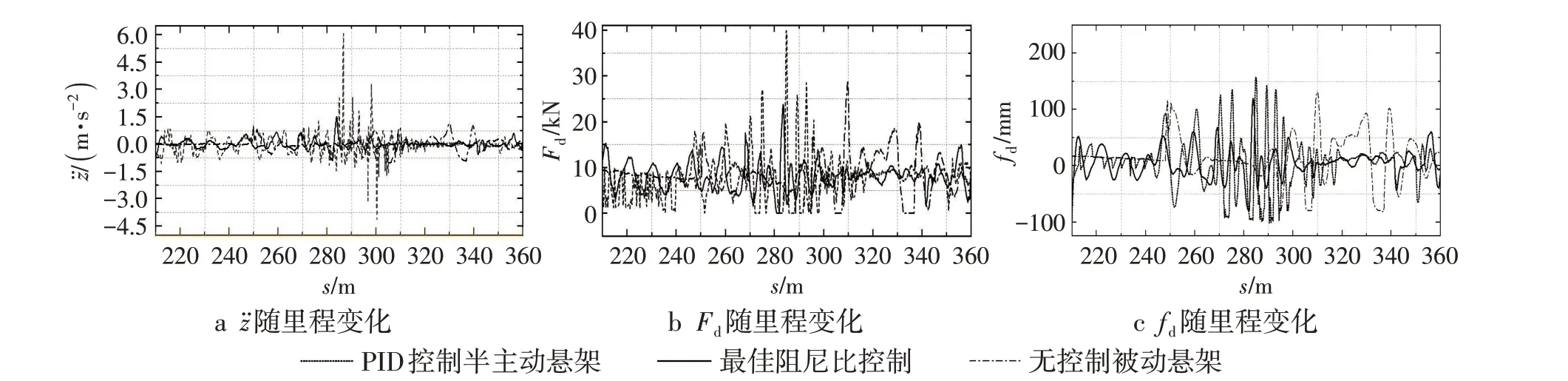
图7 z̈、Fd和fd对比分析
相对于PID控制半主动悬架,最佳阻尼比控制半 主 动 悬 架 在 铺 装 路 面,z̈、Fd和fd分 别 下 降 了16.8%、2.6%、8.9%;在越野路面,z̈、Fd和fd分别下降了15.9%、13.4%、26%。相对于无控制被动悬架,最佳阻尼比控制半主动悬架在铺装路面,z̈、Fd和fd分别下降了6.0%、1.7%、5.9%;在越野路面,z̈、Fd和fd分别下降了10.5%、10.7%、12.6%,如表2所示。

表2 控制结果对比表
从仿真结果可看出,PID控制半主动悬架没有比无控制被动悬架效果好,因为单一采用PID 控制,参数不能动态适应路况和速度的变化以及悬架的非线性。
4 结论
在TruckSim 中建立了整车模型和道路模型,在Simulink 中建立了连续阻尼可调节的油气悬架的最佳阻尼比控制策略,通过联合仿真结果表明,与PID控制半主动悬架和无控制被动悬架相比,车身垂直振动加速度、车轮动载荷以及悬架动扰度都得到改善,特别是在越野路面,不仅提高了安全性,而且提高了乘坐的舒适性。
猜你喜欢
汽车观察(2022年12期)2023-01-17
地震研究(2021年1期)2021-04-13
装备制造技术(2020年11期)2021-01-26
汽车观察(2019年2期)2019-03-15
振动与冲击(2019年4期)2019-02-22
上海公路(2018年3期)2018-03-21
小学生导刊(2017年13期)2017-06-15
广州大学学报(自然科学版)(2016年2期)2017-01-15
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
车迷(2015年11期)2015-08-23