提高北斗RTK定位精度的方法
2022-09-26 07:28:52黄雪琪
数字通信世界 2022年8期
黄雪琪
(广西职业师范学院,广西 南宁 530007)
0 引言
北斗卫星导航系统是我国自主研发、自主建设、独立运行的卫星导航系统,是为全球用户提供全天候、全天时、高精度的定位、导航和授时服务的国家重要空间基础设施。目前,我国北斗卫星导航系统的定位精度在10米左右,基本满足一般导航的需求,但仍无法满足定位精度要求更高的领域,如地形测量、施工放样、道路施工、精准农业、智慧城市、汽车自动驾驶等。
RTK(实时动态定位,Real-time Kinematic)是卫星导航技术的一个分支,利用卫星信号中的载波相位观测量组成差分方程,通过整周模糊度快速求解,实现基准站与移动站之间实时定位,RTK可获得厘米级的定位精度。
将北斗卫星导航系统与RTK技术结合起来,是当前高精度定位研究的热门课题之一,具有广阔的应用前景。
1 北斗RTK定位原理
随着定位技术的探索和发展,通过差分技术对卫星的民用信号进行修正处理技术日趋成熟,发展出了RTK定位技术,RTK技术是卫星导航定位技术的重要应用,极大地提高了定位的效率[1]。该技术通过大量建设CORS站来获得卫星信号的修正值,其主要原理是,通过定位接收机同时获取卫星信号和修正值来进行差分计算,以获得更高精度的定位位置,该技术利用北斗地基增强系统,通过对北斗卫星导航系统卫星信号增强,改善导航卫星的几何分布,增加可见卫星数,削弱卫星定位误差影响,保障了RTK定位的可靠度与稳定性[2]。理论上,RTK技术可以实现厘米级的定位精度。
北斗RTK技术的基本原理是建立在实时处理两个观测站的载波相位上的,这两个观测站中有一个为基准站,另一个为流动站,如图1所示。基准站的坐标在建设的时候已经明确,设基准站准确坐标为x,y,z,其中,x,y为平面坐标,z为纵向坐标,也可以理解为高程。在基准站中使用北斗卫星地面接收机接收北斗导航卫星发送的载波信号,便可获得北斗导航卫星定位的坐标为x1,y1,z1,则基准站的准确坐标与卫星定位坐标之间有差值△x=x1-x,△y=y1-y,△z=z1-z。在基准站周围的一定范围内,如果环境条件相近,北斗卫星接收机的接收精度也相近,则流动站的实际坐标与北斗卫星接收机获得的坐标之间的差值,可以参考基准站的坐标差值,均为△x,△y,△z。如果流动站实际坐标为x2,y2,z2,流动站的北斗卫星接收机获得的坐标为x3,y3,z3,则x3-x2=△x,y3-y2=△y,z3-z2=△z。由于x3,y3,z3通过北斗卫星地面接收机已经得到,△x,△y,△z可以通过基准站获得,所以流动站的实际坐标就可以被解算出来。

图1 北斗RTK定位示意图
北斗RTK技术的工作原理如下:在同一个时间点上,基准站和流动站的北斗卫星接收机将会同时收到北斗导航卫星发送的定位信息,然后由基准站的数据处理中心利用基准站的固定坐标与北斗卫星地面接收机获得的坐标进行解算,并通过无线电信号将解算得到的结果发送给流动站。流动站接收到基准站发送过来的观测数据后,可以利用流动站设备中嵌入的解算软件,将从北斗导航卫星获得的坐标进行修正,便可得到观测点的精确坐标。如图2所示。
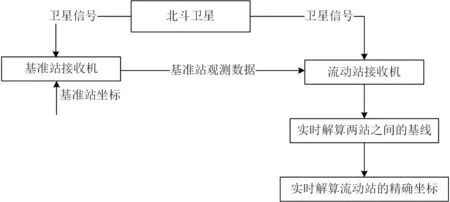
图2 北斗RTK定位原理图
2 影响RTK定位精度的主要因素
虽然利用RTK技术可以获得很高的定位精度,理论上可以达到厘米级,但是在一般的条件下,很难达到这个精度,主要有以下几个方面的原因。
2.1 导航卫星导航精度的问题
北斗导航卫星是利用电磁波以载波的方式将导航信息传送到地面接收机上的,在传送过程中需要穿过地球大气层,而大气层中的电离层和对流层都对电磁波具有一定的折射效应,这会直接影响导航卫星到地面接收机的实际距离,从而影响导航精度,电离层延迟、对流层延迟、多路径效应、接收机噪声都与高度角有直接关系,高度角越低,观测值精度越低[3]。此外,卫星的星历、卫星时钟都会影响导航精度。
(1)电离层:地球周围从60多千米到几千千米的范围内有很厚的电离层,电离层对电磁波具有折射效应,这会使北斗信号的传播速度发生变化,这种变化被称为电离层延迟。电磁波受电离层折射的影响与电磁波的频率以及电磁波传播途径上的电子总含量有关。
(2)对流层:地球周围的对流层虽然只有10~20千米,但是对流层有大量的空气和水气,这些空气和水气受温度影响很大,对电磁波的折射效应也很大,而且受天气影响非常明显。对流层会使北斗信号的传播速度发生变化,这种变化被称为对流层延迟。电磁波受对流层折射的影响与电磁波传播途径上的温度、湿度和气压有关。
(3)卫星星历:虽然卫星的轨道是相对固定,但是由于受到复杂的外力作用,卫星的位置、与地面控制站和接收终端的距离都是一个接近值,经常会有几十千米的误差,这些误差在导航中都会影响到导航的精确度。
2.2 卫星钟差问题
卫星钟差是指北斗卫星时钟与北斗标准时间的差别。北斗在轨卫星几十颗,虽然目前卫星上都使用铯原子钟,但每颗卫星的时间还是有微小的误差的,这些微小的误差在高速运行的卫星中就会被不断地放大,影响导航精度。此外,地面接收站的时间一般都采用石英钟,与卫星的时钟更难同步,也会影响导航精确度。
2.3 基准站与流动站接收卫星载波信号同步问题
RTK的定位原理明确要求基准站与流动站同步接收导航卫星的载波信号,而基准站与流动站之间的卫星接收机受时钟精度的影响不可能绝对同步。另一个原因是,基准站接收到导航卫星的载波信息,需要对基准站固定坐标与通过北斗卫星地面接收机获得的坐标进行解算,然后才能将观测数据通过无线电波发送到流动站。这个过程需要一定的时间,也就是说当流动站接收到基准站发送过来的观测数据时,已经是下一个时间点。流动站与基准站接收卫星载波信号是有时间差的,虽然这个时间差很短,但会影响到测量精度。
2.4 基准站与流动站环境影响
基准站与流动站环境条件相似度越高,获得的测量精度也越高,但是在实际测量中很难做到。一方面,基准站与流动站有一定的距离,有些甚至达到几十千米,而在这几十千米的距离中,地形地貌会有很大的变化,特别是丘陵、山地等;另一方面,城市中由于高楼林立,各种电磁波覆盖城市空间,基准站与流动站如果在城市的不同地方,会受到高楼信号反射的影响,同时也会受大量电磁波的影响。除此之外,基准站与流动站所在位置的卫星信号差距也会影响测量精确度,如基准站卫星地面接收机能接收到15颗卫星信号,而流动站只能接收到10颗卫星;按目前的技术,两个接收机获得的卫星导航精度是不同的,这些都会影响到RTK最后的测量精确度。
3 提高定位精度的方法
随着现代科学技术的快速发展,对测量的精度要求越来越高,如施工放样、道路施工、汽车自动驾驶等,为了进一步提高RTK测量精度,可以采取以下几个方面的措施。
3.1 构建网络RTK
使用RTK技术进行精确测量,需要依赖基准站的观测数据作为纠正值,为了保证测量的精度,基准站与流动站之间的距离最好控制在10~20千米的范围内,而且要求基准站与流动站之间数据通信流畅,这样就限制了流动站的作业范围。为了扩展流动站的作业范围,减少单个基准站采集数据可能出现的误差,现在很多国家都采用构建网络RTK的方式,即在某个范围内建设多个基准站,并且将多个基准站连成网络,建立统一的数据处理中心,网络RTK技术是通过对CORS系统运行过程中各种误差进行精确估值,利用这些误差估值模型生成差分定位数据,并将差分改正数通过网络发送至用户接收机[4]。这样流动站的作业范围不仅可以扩展到100千米以上,而且通过多个基准站的数据校正,可以进一步提高测量精度。
3.2 构建“虚拟参考站”
虚拟参考站则是在网络RTK的基础上,通过构建数学模型、采用区域的历史坐标数据,在流动站的附近生成虚拟的参考站,并根据周围各基准站上的实际观测值算出该虚拟基准站的虚拟观测值。由于虚拟参考站离流动站很近,一般仅相距数米至数十米,故流动站只需采用常规RTK技术就能与虚拟基准站进行实时相对定位。
3.3 强化对基准站的选址
在选择基准站的时候,应尽量选择开阔地带,避免基准站上的卫星被遮挡和无线电干扰。同时,要明确基准站的坐标系,以便能够快速地计算出卫星接收机的误差值,为流动站提供快速的纠正值。
3.4 提高观测数据的计算和传输效率
对于网络RTK,由于涉及多个基准站数据,要建设统一的数据中心,以便能够快速地将各个基准站采集到的数据进行综合计算,并根据流动站的位置计算出最优的纠正数据。同时,改进部分模糊度固定解算,提高固定率和解算速度[5],此外,要提高数据链的覆盖能力、扩大作业半径、增强稳定性和安全性,来获得全天候、适时、连续的数据。
4 结束语
RTK技术的发展,带来了测量技术的变革。以前,RTK技术研究更多聚焦于使用GPS卫星定位系统来进行高精度定位,近年来,随着我国北斗卫星导航系统的全面建成,使用北斗+GPS双系统进行RTK高精度定位的相关研究越来越多。在可预见的将来,基于北斗的RTK技术必将在高精度定位领域得到越来越广泛的应用,定位精度也将不断提高。
猜你喜欢
中国港湾建设(2023年12期)2023-12-27 17:19:58
科学导报(2023年84期)2023-12-17 16:29:04
军事文摘(2023年4期)2023-04-05 13:57:35
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年6期)2018-11-25 09:50:18
测控技术(2018年4期)2018-11-25 09:47:22
电子制作(2018年19期)2018-11-14 02:36:40
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
黑龙江工程学院学报(2015年2期)2015-04-19 00:43:13