
可逆PWM逆变器及其MATLAB仿真
2022-09-19 12:48田素娟
内蒙古科技与经济 2022年14期
田素娟
(包头职业技术学院 电气工程系,内蒙古 包头 014030)
脉冲宽度调制变换器(简称“PWM变换器”)是直流脉宽调制调速系统(P-M系统)的一个关键环节,是该系统的主电路部分,它的原理实际上是利用GTO、GTR、IGBT等全控型电力电子器件构成的直流斩波器,将固定的直流信号转换成大小可调的直流信号,为DC-DC电源变换装置。它有调制频率高、动态响应速度快以及电动机转矩平稳脉动小等优点,所以脉冲宽度调制调速系统在中小功率调速系统以及伺服系统中广泛应用,并且可以获得显著的节能效果。可逆PWM变换器主电路的结构以H型变换器最为常见,它是由4个全控型电力电子器件和4个续流二极管组成的H型桥式电路。H型可逆PWM变换器的控制方式有3种类型,分别为双极式、单极式和受限单极式。本篇主要讲解可逆PWM变换器不同控制方式时的工作原理,并利用MATLAB仿真软件进行仿真。
1 可逆PWM变换器原理
图1为H型可逆PWM变换器的电路原理图。图1中采用的全控型电力电子器件是电力晶体管GTR,根据4个开关管的控制信号不同,可以有2种控制方式,即单极式和双极式控制。
1.1 双极式控制方式下的H型PWM变换器原理
1.1.1 对控制信号的要求。VT1和VT4的控制信号相同,VT2和VT3的控制信号相同,这样就可以使得VT1和VT4同时导通,VT2和VT3同时导通,4个控制信号的波形图如图2所示。同时,VT2、VT3控制信号的极性与VT1、VT4的控制信号极性相反,这样就避免了上下两个桥臂上的管子同时导通的短路现象的发生,降低短路事故的发生率。
1.1.2 电路原理分析。在一个周期内,ton之前,VT1、VT4的控制信号ub1、ub4为正,电力晶体管VT1和VT4饱和导通;VT2和VT3的控制信号ub2、ub3为负,电力晶体管VT2和VT3截止,流过电动机电枢的电流id从Us的正极流出,经过VT1到电动机电枢,再经过VT4到Us的负极,在这个电流回路中忽略VT1、VT4,电动机电枢两端的电压UAB为正的Us,ton之后到一个周期结束时,VT1、VT4的控制信号ub1、ub4由正极性变负,电力晶体管VT1和VT4截止;ub2和ub3由负极性变正,但是电力晶体管VT2和VT3并不能立即导通,因为在电动机电枢电感上产生的感应电动势使二极管VD2和VD3承受正向电压而导通形成续流通路,向电源Us释放能量,在二极管VD2和VD3上的管压降使VT2和VT3的集射之间受反压不能导通,这期间电枢AB两端电压UAB=-Us。开关管在一个开关周期内,电动机电枢两端的电压为+Us或-Us,正负相间,所以这种控制方式下的脉宽变换器称为双极性PWM变换器。
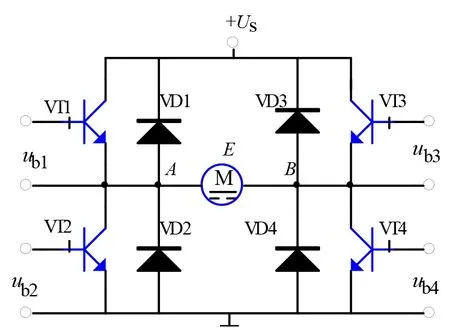
图1 H型PWM变换器原理
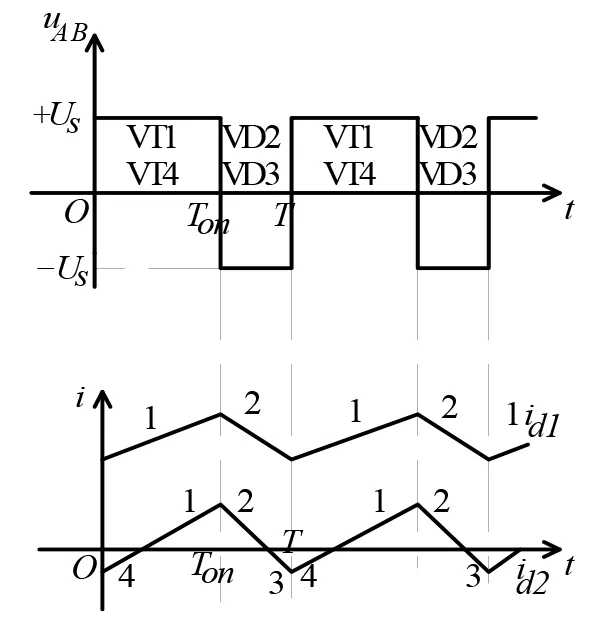
图2 双极式PWM变换器电压电流波形
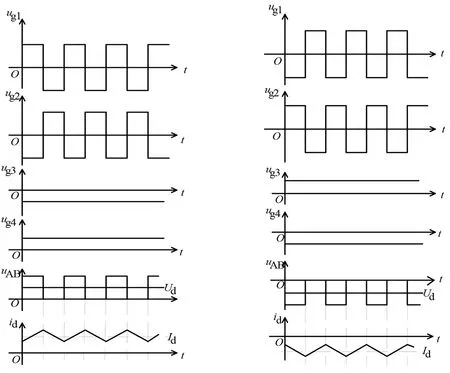
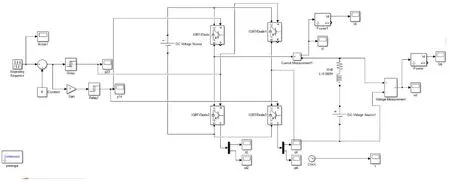
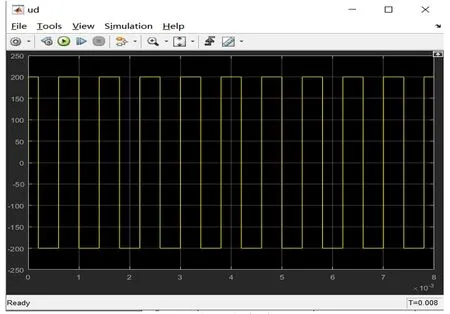
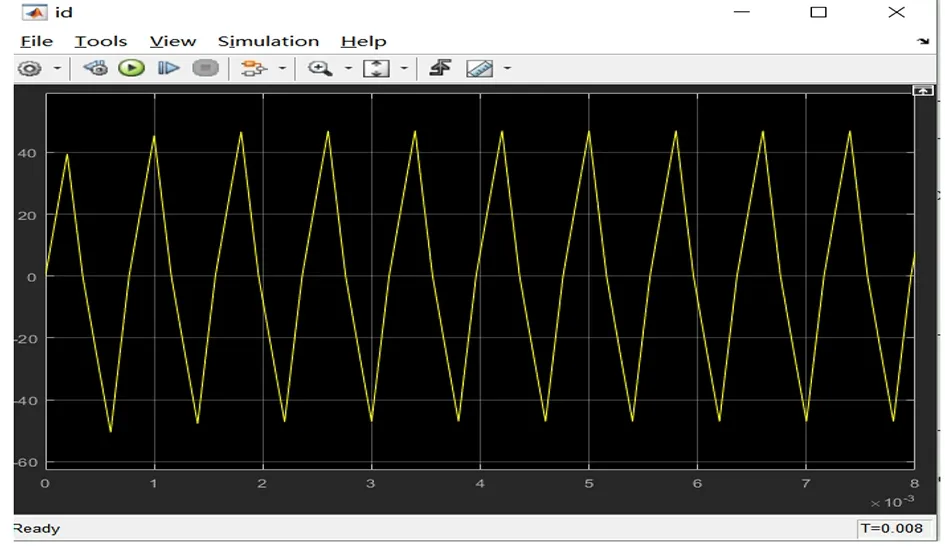
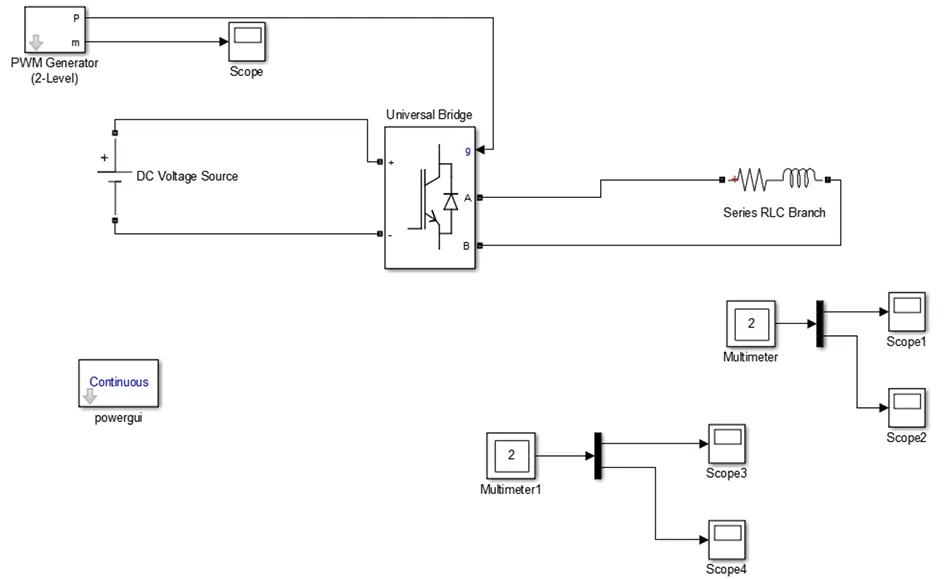
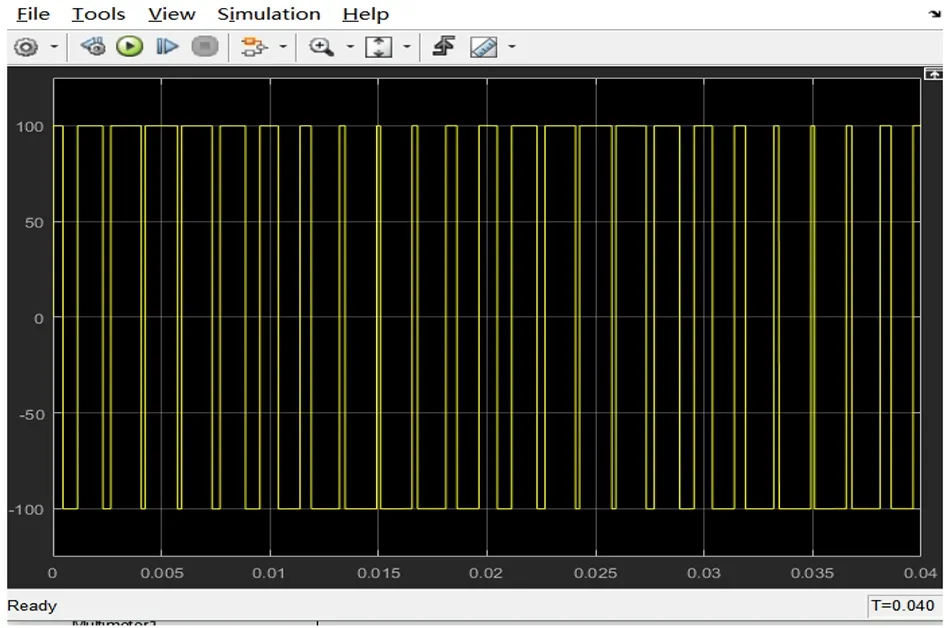
1.1.3 流过电动机电枢的电流波形。流过电动机电枢的电流波形随负载轻重分为2种情况:①重载时,流过负载的电流较大,波形如图2中的id1,后半周期为续流阶段,电流流动方向不变,电动机工作在正向电动运行状态;②轻载时,电流较小时,电流id的波形如图2中的id2,续流时间较短,在下一个周期到来之前,电流就已经衰减到零,电力晶体管VT2和VT3的集射之间不再承受反向电压,而是承受电源给的正向电压变成导通状态,流过电动机电枢的电流反向,id从电源Us正极→VT3→电动机电枢→VT2→电源Us负极,电动机工作在制动运行状态。同理,在0≤t 对控制信号的要求:VT1和VT4的控制信号相同,VT2的控制信号一直为正,VT3的控制信号一直为负,使VT1和VT4交替导通,VT2和VT3的管子一个一直导通,一个一直关断(根据电机的转动方向而定)。4个控制信号以及输出波形如图3所示。这样,在性能要求不是太高的系统中应用单极式控制方式,可以减少开关损耗和降低上下两管同时导通的短路事故的发生,系统的可靠性得到提高,但是系统的低速性能相对较差。 (a)正转时 (b)反转时 在MATLAB/Simulink仿真环境中建立可逆PWM变换器的数学模型,如图4所示。通过对脉冲发生器的控制,使电路工作在双极式工作方式下,其中H桥变流器调用了多功能桥,其参数设为两相桥臂,桥中的开关器件采用的是全控型器件IGBT,为了防止同一侧桥臂上的上下两管出现同时导通的“直通”现象,在控制电路中设置了反向器模块。 图4 可逆PWM变换器的数学模型 从观测器中观察到输出电压及电流的仿真结果如图5、图6所示。 图5 电压仿真波形 图6 电流仿真波形 通过上述理论分析及仿真可以得出,输出电压的PWM波形幅值相等、宽度可以根据全控型器件的通断控制实现调节,其谐波成分较大。如果采用SPWM技术进行控制,输出的脉冲序列不仅幅值相等、宽度可调,也可以实现宽度按照正弦规律变化,这样得到的脉冲序列就可以和正弦波相等效,作用效果相当,大大减少了谐波成分。图7建立采用IGBT全控型器件的双极性控制SPWM单相变换器模型,并进行适当的参数配置,进行仿真。 图7 单相变换器模型 从观测器中观察到输出电压的仿真结果如图8所示。该波形是幅值相等、宽度按正弦规律变化的双极性脉冲序列。 图8 输出电压波形 通过分析与仿真,可逆PWM变换器不管在单极式控制方式下工作还是在双极式控制方式下工作都可以很好地实现电动机的四象限运行。并且,当采用SPWM控制时,可以大大减少谐波成分。1.2 单极式控制方式下的H型PWM变换器原理
2 可逆PWM变换器的建模及MATLAB仿真
3 单相双极性控制的SPWM变换器建模及仿真
4 结束语
猜你喜欢
弹道学报(2022年3期)2022-10-08
火力与指挥控制(2022年5期)2022-07-25
内蒙古电力技术(2021年5期)2021-11-21
莆田学院学报(2021年5期)2021-11-13
防爆电机(2021年4期)2021-07-28
上海大中型电机(2021年2期)2021-07-21
弹箭与制导学报(2020年1期)2020-07-09
弹箭与制导学报(2019年6期)2019-06-24
速读·下旬(2019年3期)2019-04-11
智能建筑电气技术(2015年5期)2015-12-10
