液压机械臂腕部旋转直线作动器的研究
2022-09-19 05:53:28赵玉贝吴天福王瑞雪
机床与液压 2022年5期
赵玉贝,吴天福,王瑞雪
(国机智能技术研究院有限公司,北京 100083)
0 前言
机械臂腕部是机械臂实现灵巧操作的重要部分,液压机械臂采用旋转和直线作动器,实现液压机械臂腕部回转和末端手爪开合。目前国内液压机械臂腕部的设计一种形式是小排量摆线马达与直线薄壁油缸并联垂直布置,摆线马达输出扭矩通过直齿轮和蜗轮蜗杆减速后传递给腕部,缺点是蜗轮蜗杆的允许输出扭矩限制了腕部输出扭矩,只能达到几十牛米,且管路布置乱;另一种形式是摆动油缸与直线油缸串联同一轴线布置,缺点是腕部不能连续回转,轴向尺寸大,质量大,空间管路难以布置,影响液压机械臂美观及性能。
作者将摆线液压马达和直线油缸串联组合成液压机械手的腕部,充分利用摆线马达的低速大扭矩特点,将摆线马达输出轴作为直线油缸的缸体,摆线马达和直线油缸进出油口都位于腕部连接座尾端。该腕部整体结构紧凑,输出扭矩大,手爪夹持力大,液压管路易于布置。现对其结构、工作原理和性能进行分析介绍。
1 液压机械臂腕部作动器系统构成及技术参数
1.1 系统构成
该液压机械臂腕部主要由手爪1、腕部壳体2、腕部连接座3、摆线马达13、直线油缸8和旋转变压器16等组成,见图1。摆线马达13为负一齿差浮动式摆线轮型摆线马达,马达输出轴14带动直线油缸8和手爪1进行旋转,直线油缸8推动和缩回带动手爪1的开合;旋转变压器16作为摆线马达13的角度传感器和摆线马达13的控制阀组成位置闭环,精确控制腕部的回转角度。
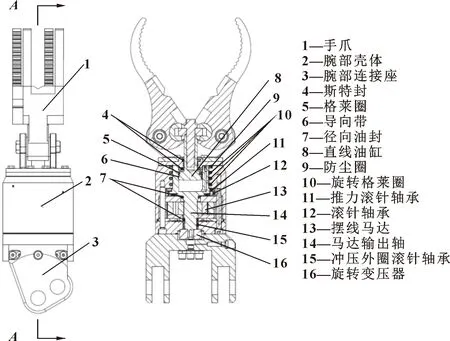
图1 液压机械臂腕部结构
(1)摆线马达
该摆线马达(图2—图3)是利用行星减速机构原理(负一齿差原理)而设计的端面配油内啮合摆线针轮马达,主要由配流阀1、配流盘2、组合式转子3、浮动摆线轮4、防滚轮5和固定座6等组成。配流盘2和组合式转子3通过花键连接在马达输出轴8上;防滚轮5和组合式转子3同时和浮动式摆线轮啮合,使得浮动式摆线轮做平动。该摆线马达将大容积和减速增扭结合起来,实现了液压机械臂腕部的低速大扭矩需求。采用负一齿差摆线针轮传动、浮动式摆线轮和组合式转子,实现了输出轴与转子的自转相连,无需万向节转换,大大减少了轴向尺寸;负一齿差摆线针轮相较一齿差摆线针轮减速比大;组合式转子采用滚子代替了外齿环的圆弧齿形,活动针齿在摆线转子中自如旋转,针齿和摆线轮之间的滑动摩擦变为滚动摩擦,摩擦力大大减小。负一齿差摆线马达主要计算公式见表1。

图2 摆线马达分解图

图3 摆线马达示意
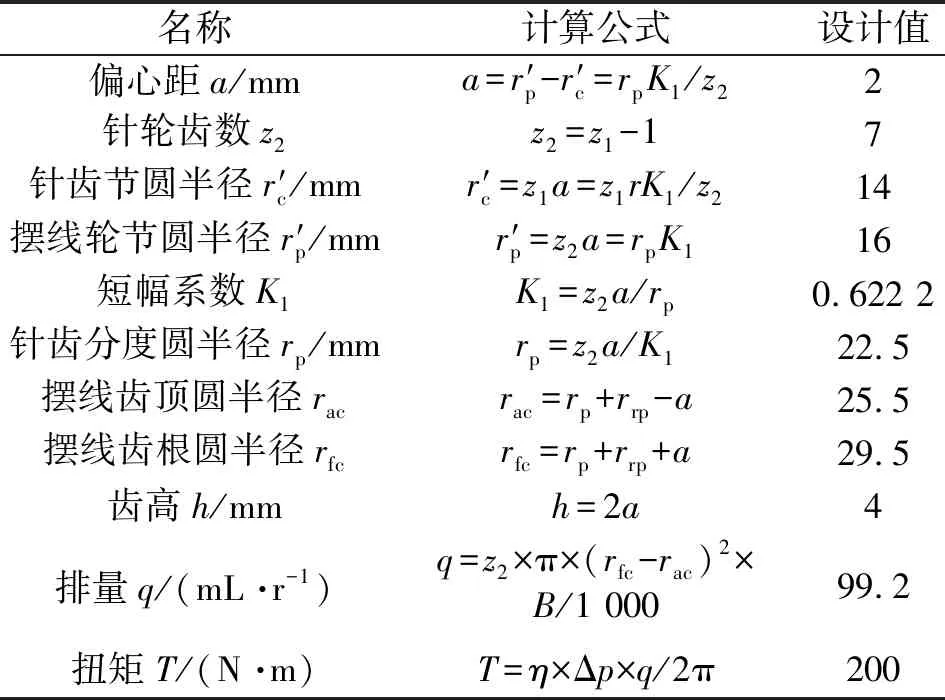
表1 负一齿差摆线马达主要计算公式[5-7]
表中:为摆线轮齿数,8;为摆线轮宽度,20.5 mm;为针柱体半径,10 mm;Δ为马达进出口压力差,14 MPa(工作压力=21 MPa,液压伺服系统中负载压力按2/3计算);为总机械效率,0.9。
一般液压机械臂控制阀为电液伺服阀或电液比例阀,额定流量通常为4 L/min,因此该液压机械手腕部摆线马达的转速范围为5~40 r/min。
(2)直线油缸
直线油缸的缸体即为摆线马达输出轴,活塞和活塞杆采用一体式结构,活塞杆的伸出缩回带动手爪开合。直线油缸参数见表2。

表2 直线油缸参数
(3)手爪
手爪开合距离0~148 mm,手爪的夹持力分析见图4。
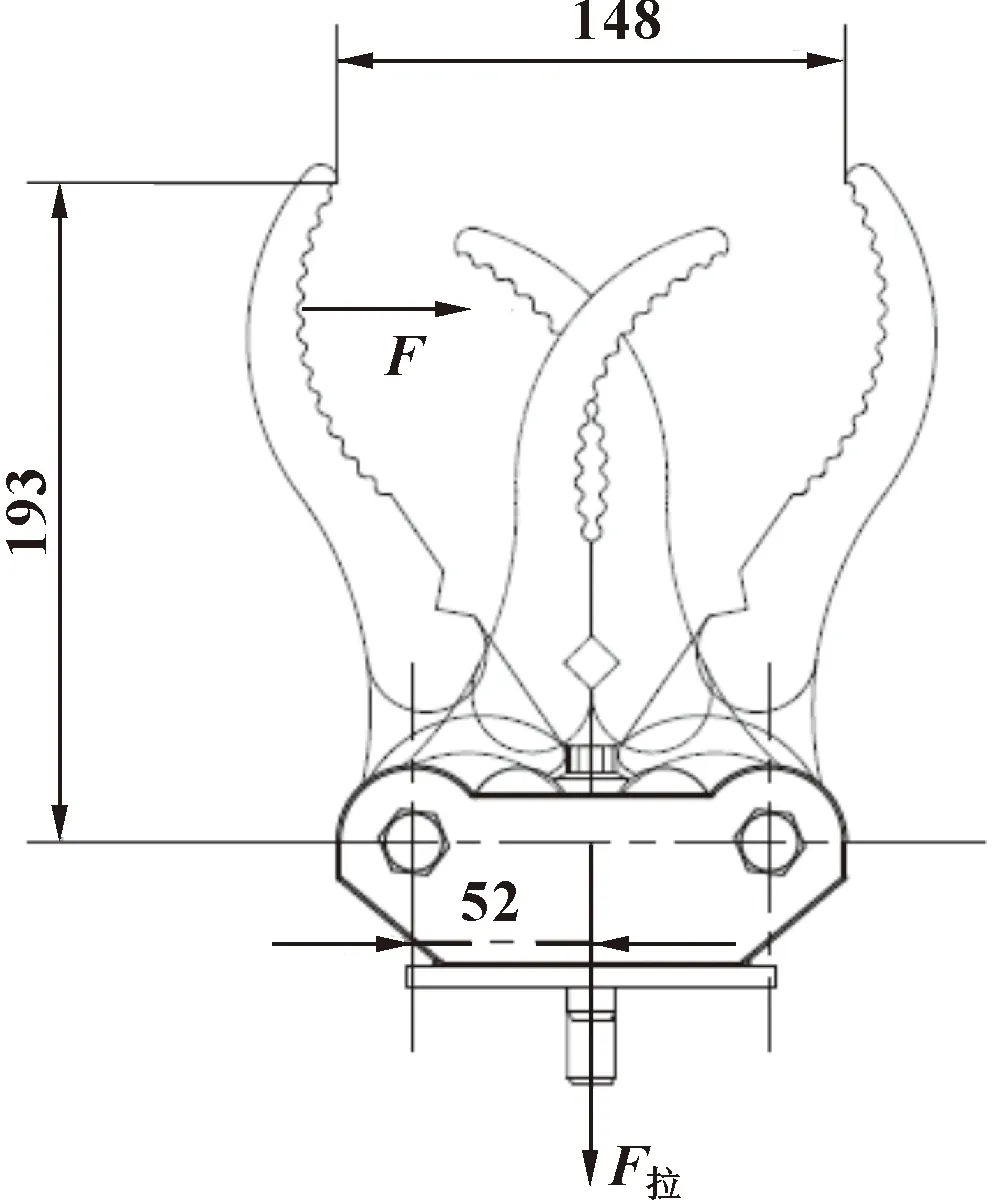
图4 手爪夹持力分析
手爪夹持力大小跟手爪夹持物体的手爪受力位置有关。按照手爪受力的最大力臂进行计算,可得手爪的能提供的夹持力不小于=3 306 N。
1.2 技术参数
液压机械臂腕部技术参数如表3所示。
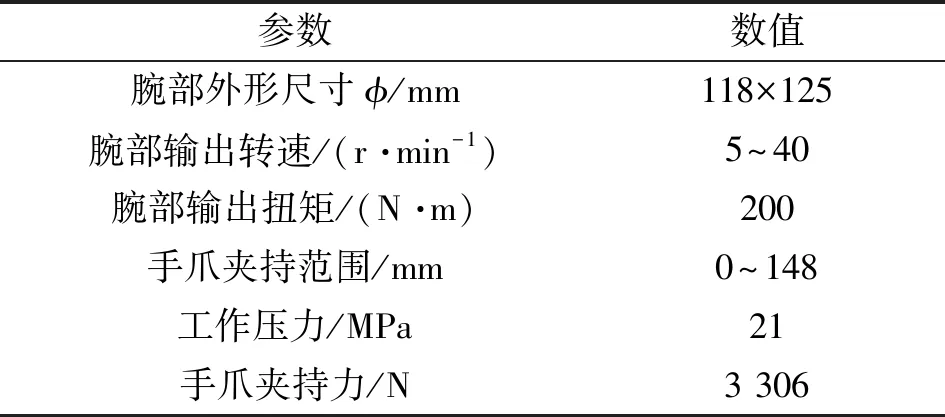
表3 液压机械臂腕部技术参数
2 工作原理
2.1 液压原理
该腕部的液压原理如图5所示。腕部的回转控制通过电液伺服阀/比例阀和摆线马达上的旋转变压器形成位置闭环,精确控制腕部回转角度;腕部的手爪开合通过电液伺服阀/比例阀控制手爪油缸实现,其手爪的夹持力通过给定力值与通过油缸有杆腔、无杆腔压力传感器计算的油缸拉力进行闭环控制。
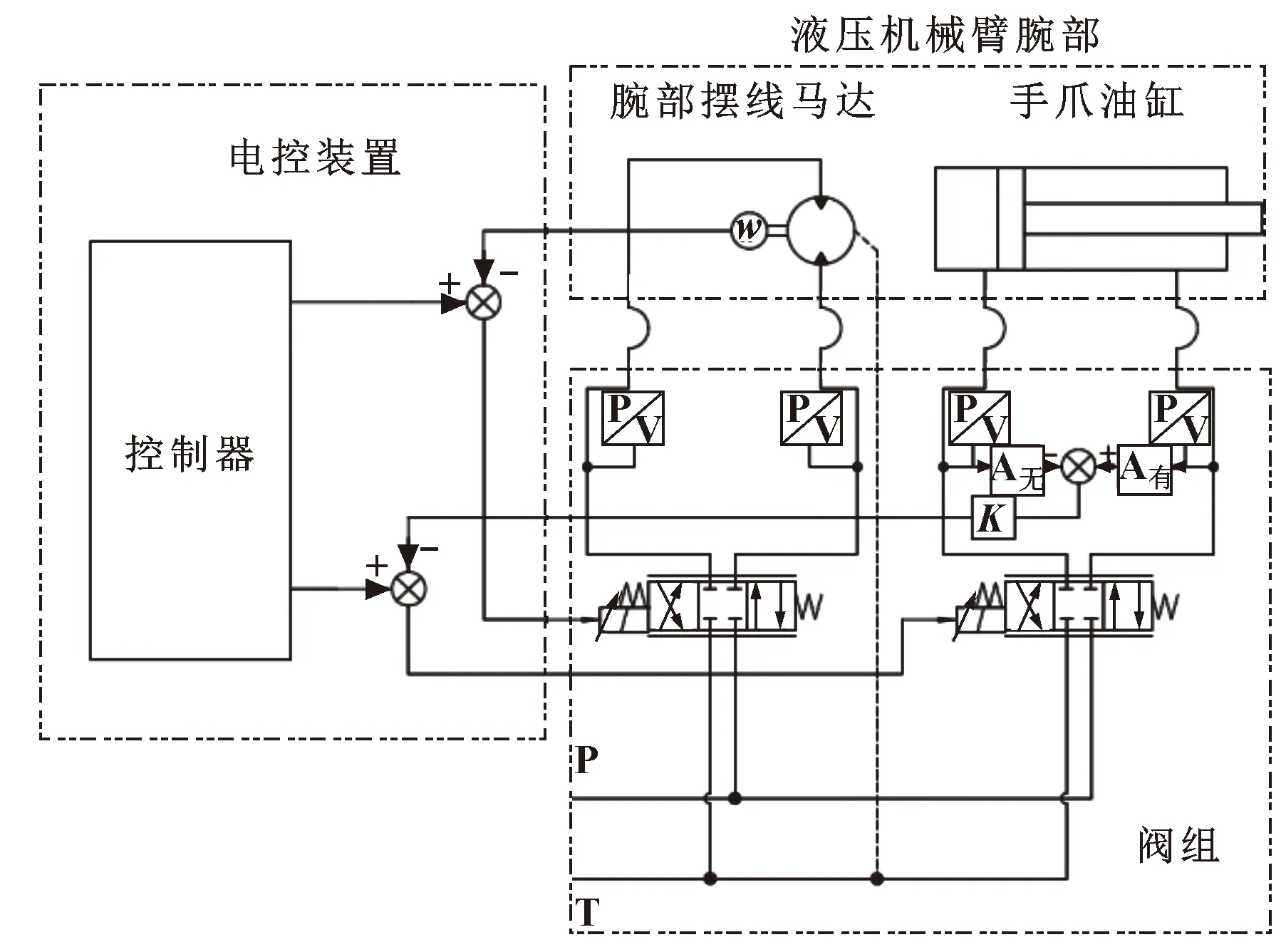
图5 腕部液压原理
2.2 工作原理
如图1所示,液压机械臂腕部的供回油都位于腕部连接座3尾端,利于液压机械臂管路布置,共分为5路,其中3路为马达的供回油路和泄油路,马达供回油路直接连通摆线马达的配油阀1和配油盘2,配流阀1上设计环形油槽且7个位置油孔对应配流盘2,当马达输出轴8旋转实现端面配油连续循环同步;泄油路通过马达的安装螺钉(内部孔)连通油路;另外两路为油缸进回油路,油路在摆线马达的安装螺钉(内部孔)处,沟通输出轴上的环形槽上,通过输出轴上工艺孔与油缸的有杆腔和无杆腔连通;油缸的无杆腔进油有杆腔回油,带动手爪张开,电液伺服阀/比例阀控制进出油切换,手爪闭合。
如图2所示,摆线马达进油口进油,持续的高压油带动浮动摆线轮4轴心绕组合式转子3的几何轴公转,同时通过摆线针轮减速实现组合式转子3绕固定座6几何轴低速自转,而马达输出轴8通过花键在组合式转子3偏心安装,组合式转子3通过花键带动马达输出轴8低速自转,从而带动油缸和手爪回转;电液伺服阀/比例阀控制进出油切换,从而控制摆线马达的回转方向。
3 液压机器臂腕部的性能和结构特点
液压机器臂腕部具有以下结构和性能特点:
(1)能量转换效率高。腕部摆线马达采用负一齿差针轮摆线共轭副和浮动式摆线轮,平面力系传动仅受径向阻力,同时共轭副滚动啮合,旋转平稳,阻力小,采用强氮化表面处理,高精磨削成型,效率较高,其运动输出机构为花键输出机构,传输效率高。
(2)腕部结构紧凑,输出扭矩大,外形尺寸小,质量轻。该设计将旋转和直线执行件合二为一,在功能满足的情形下,将摆线马达和直线油缸合理地布置在一起,通过花键将低速大扭矩传递给手爪负载;摆线马达结构内部,通过合理的油路布置和径向、环向密封结构,保证密封可靠性,提高摆线马达的工作压力和寿命;直线油缸采用斯特封、格莱圈密封和导向带,尤其是通过活塞杆两道反向斯特封,既防止污染物进入,又减少油缸的摩擦力,同时使油缸结构进一步紧凑,对液压机械臂的轻量化意义重大。
(3)腕部摆线马达可以作为不同液压机械臂腕部的通用件,仅需改变直线油缸和手爪的结构,就能将此种腕部结构用在不同形式的液压机械臂上。例如腕部配合平行手爪,在腕部摆线马达做位置闭环的同时,利用控制阀组上的压力传感器和直线油缸上增加的LVDT位移传感器,可以对平行手爪进行精确的力/位移闭环控制,扩大液压机械臂腕部的使用范围。
4 结语
这种液压机械臂腕部旋转直线作动器是以负一齿差浮动式摆线轮型摆线马达为核心,在摆线马达和直线油缸的结构布局、油路进行了一系列的创新设计。液压机械臂腕部整体结构紧凑,质量轻,稳定转速低,输出扭矩大,腕部回转能够进行位置闭环,精确控制腕部回转角度。并且实际应用中腕部可以增加LVDT位移传感器,精确地控制手爪的开合距离和夹持力,能够在需要液压机械臂进行精确夹持时进行力/位移闭环控制。
猜你喜欢
汽车实用技术(2021年23期)2022-01-05 11:21:42
中老年保健(2021年5期)2021-08-24 07:07:36
中老年保健(2021年6期)2021-08-24 06:55:28
中老年保健(2021年7期)2021-08-22 07:42:30
防爆电机(2021年1期)2021-03-29 03:02:50
上海医学(2019年1期)2019-04-13 05:56:20
电子制作(2018年24期)2019-01-03 02:30:30
荣誉杂志(2017年7期)2017-08-23 08:05:59
制造技术与机床(2017年3期)2017-06-23 08:11:51
机械工程师(2014年12期)2014-12-23 06:44:04