基于模糊滑模与新型扩张状态观测器的SPMSM无速度传感器控制
2022-08-22 04:24:42于永进朱昱豪周封王博扬
电机与控制学报 2022年7期
于永进, 朱昱豪, 周封, 王博扬
(1.山东科技大学 电气与自动化工程学院,山东 青岛 266590; 2.国网胶州市供电公司,山东 青岛 266300)
0 引 言
永磁同步电机(permanent magnet synchronous motor,PMSM)结构简单、运行可靠,其在能量转换方面效率高,因此其广泛应用于汽车、航空航天和军事等相关领域[1]。为实现电机高性能矢量控制,需获取转子位置与速度信息,一般是通过安装在转轴上的机械式传感器获得,但其需要占用较大的空间,同时易受环境影响,增加系统成本和复杂度,可靠性下降,因此无传感器控制技术的研究有着重要意义[2]。
无传感器技术的研究主要分为中高速和零低速两个方面。高频注入法[3-4]不依赖电机基波模型,其根据电机凸极特性,向电机中注入高频电压信号,从电流响应中分离转子位置和转速信息,从而实现零低速情况下的无传感器控制。对于中高速情况下,主要依赖PMSM基波模型中与转速有关的量进行转子位置检测和速度控制,常用的有扩展卡尔曼滤波法[5-6]、模型参考自适应法[7-8]、滑模控制器法[9-14,18-22]等等,其中滑模控制对系统模型精确度要求不高,对参数变化和外部干扰不敏感,其具有较强的鲁棒性,因此逐渐成为主流的控制方法[15]。文献[9]设计PI模糊控制器,但需要对kp、ki同时进行模糊控制规则的设计,且需要同时对α-β轴电流和电压进行控制,增加了系统的复杂程度。文献[10]提出一种新型滑模观测器,用分段指数函数代替开关函数以消除抖振,但其反电动势的获取需要经过滤波器,可能造成相位延迟。文献[11]设计了一种扩展状态二阶非奇异终端滑模观测器,用于观测α-β坐标系下的转子磁链分量,系统收敛速度较快且抖振抑制效果较好。文献[12]提出一种基于跟踪微分器的新型非奇异快速终端滑模观测器,实现了系统有限时间的快速收敛,减小了高频噪声,但同时需要对微分器的各参数进行整定设计,增加了计算量。文献[13]提出一种自适应模糊滑模观测器的控制方法,减少动态响应时间且削弱抖振,但其滑模面收敛速度较慢,且利用反正切法估算转子位置会导致高频抖振误差被放大。文献[14]设计了一种基于新型趋近律的模糊积分型滑模速度控制器,但其普通滑模面的使用导致系统收敛速度相对较慢;提出变截止频率滤波器和修正观测器的两级滤波结构,其滤波效果较好,两级滤波器的设计增加系统构建的复杂度,且经济性差。
当考虑外部扰动时,上述文献所提出的控制方法不能很好地满足高性能表贴式永磁同步电机的控制需要。实际调速系统中,较为广泛的是利用PI控制器,通过速度、电流误差信号进行控制,但其动态性能受限,系统稳定性不能得到保证。扩张状态观测器能够对扰动进行实时观测并进行一定补偿,改善PI控制动态性能差等问题,其在电机的无传感器控制系统中应用越来越广泛[18-22]。文献[18]设计一种线性扩张状态观测器(linear extended state observer,LESO)对外部扰动进行观测,抑制系统抖振且提高了抗扰动能力,但其趋近律中依然存在开关函数,对抖振削弱不利,普通积分型滑模面的选取也使系统收敛速度相对较慢。文献[19]考虑参数变化和外部扰动影响,提出一种基于扩张状态观测器的电流解耦控制策略,将干扰量补偿在电流控制器输出量中,消除耦合并抑制干扰。文献[20]基于非线性干扰观测器设计了电流转速双自抗扰控制器,实现高精确度扰动补偿的同时也增加了系统设计的复杂程度,扩张状态观测器需整定参数也相对较多。文献[21]基于非线性扰动观测器(nonlinear disturbance observer,NDOB)和非线性状态误差反馈控制律,设计了一种速度电流级联式双环调速系统,响应速度快、鲁棒性强、控制效果较好。文献[22]设计滑模扰动观测器,将观测值补偿至前项控制器输出端;将切换增益设计为扰动观测误差的函数,削弱抖振,但其饱和函数的使用可能会对系统造成冲击,使控制时间延长、稳定性下降。
为克服现有速度控制策略调节效果差、跟踪精确度低、收敛速度慢、鲁棒性弱的问题,本文提出一种新型表贴式永磁同步电机(surface permanent magnet synchronous motor,SPMSM)无速度传感器控制方法。首先利用非奇异快速终端滑模面加快系统收敛速度,通过设计模糊规则和模糊趋近律提高系统抗扰动能力;其次建立外部扰动下的SPMSM数学模型,并根据传统扩张状态观测器设计新型滑模扩张状态观测器,实现转速和负载扰动的实时观测和精确跟踪,同时通过前项速度控制器(speed mode controller,SMC)反馈补偿提高精确度。仿真结果验证了本文所提方法的有效性。
1 SPMSM数学模型
假设SPMSM(Ld=Lq=Ls)为理想模型,忽略铁心饱和且不计涡流与磁滞损耗,在d-q同步旋转坐标系上,采用id=0的控制策略,得到SPMSM的状态方程为
(1)
式中:p为微分算子;np为极对数;ωm为机械角速度;ψf为永磁磁链;J为转动惯量;B为摩擦系数;TL为负载转矩;Ls为定子电感;iq、uq分别为q轴电流和电压。
2 模糊控制原理及规则设计
模糊控制语句简单,算法实现相对容易,其采用不确定性语言和模糊条件设计,以满足系统的高性能控制。对于全系统SPMSM无速度传感器控制而言,其模型建立相对较复杂,同时需要较大的切换增益,不仅会增大抖振,同时会使系统运行时间增加,系统稳定性下降[16]。模糊逻辑的设计不依靠被控制对象的模型,可较容易的将控制者的经验通过模糊规则融入控制器中,通过设计隶属度函数和模糊控制规则,实现高水平的控制器[17]。在滑模控制中,趋近律参数的合理选择对控制器及系统动态性能的影响较大。利用模糊控制,能够实现对函数切换增益的有效估计,从而更大程度地减弱抖振。
模糊控制设计为2维,选取系统状态变量为:
(2)
作为模糊控制的两个输入变量,取趋近律参数η作为输出变量,将控制变量模糊处理。输入变量与输出变量的隶属度函数设计、论域取值参考文献[17]。模糊规则设计如表1所示。表中:B表示大;M表示中;S表示小;NB表示负大;NM表示负中;NS表示负小;PB表示正大;PM表示正中;PS表示正小。
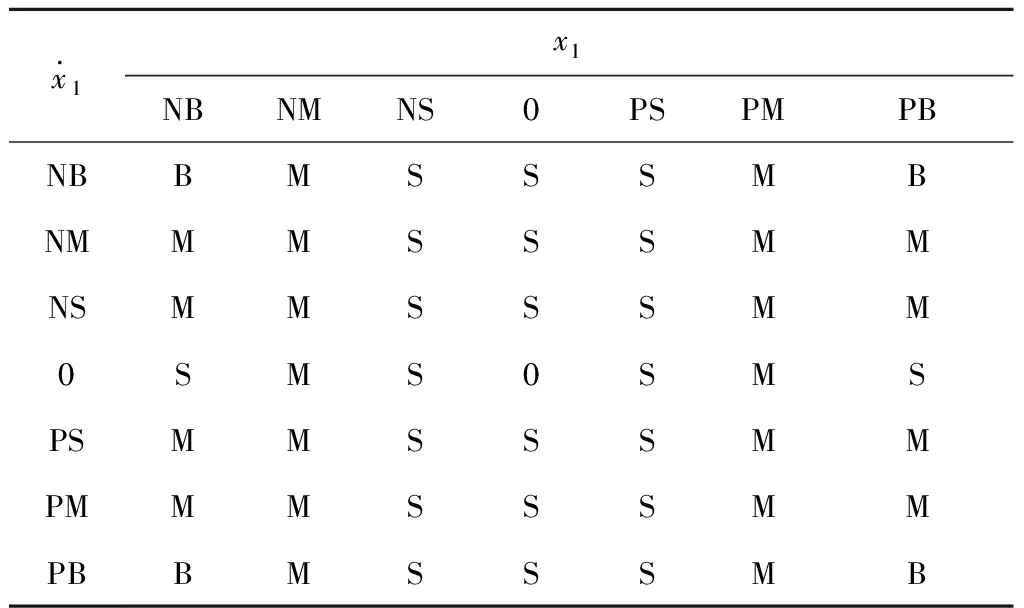
表1 η模糊控制规则Table 1 Fuzzy control rules of η
3 非奇异快速终端模糊速度控制器设计
3.1 控制器设计
传统滑模面函数设计为s=x1+cx2,设计简单但始终不会实现系统在有限时间内收敛。综合考虑传统非奇异终端滑模控制与快速终端滑模控制,在保证系统能够实现有限时间内收敛且不产生奇异性问题的基础上,本文提出了一种改进的非奇异快速终端滑模面,在滑动超平面的设计中引入两项非线性函数,使得滑模面上的跟踪误差能够更快地收敛至0,加快控制系统的收敛速度同时进一步提高观测精确度。滑模面选取为
(3)
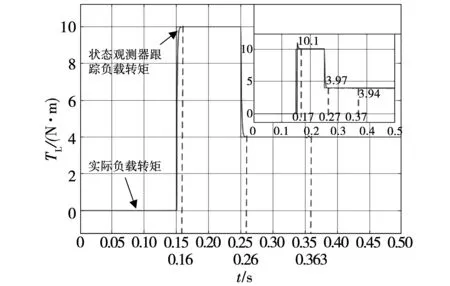
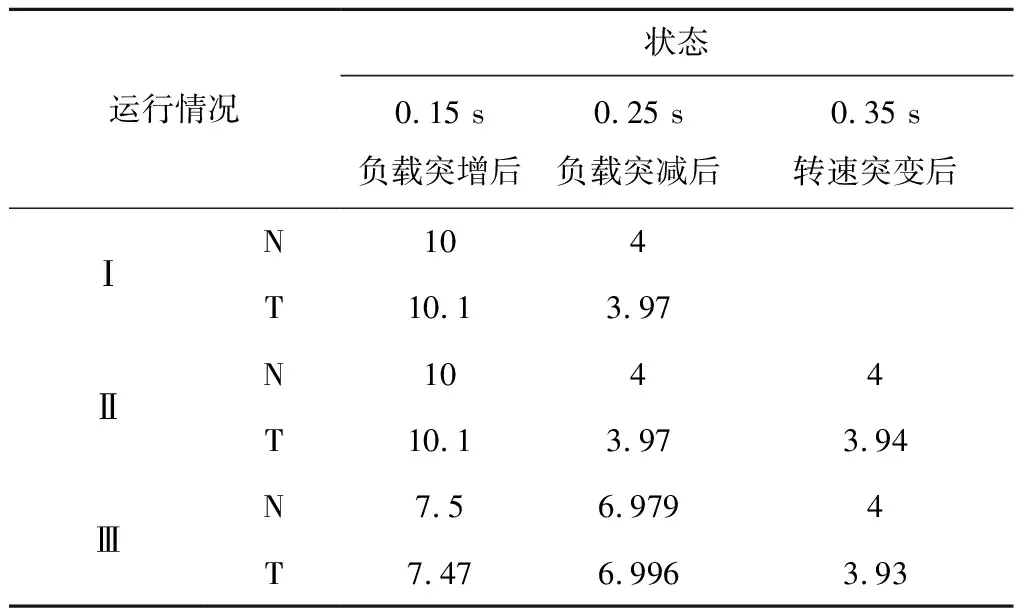
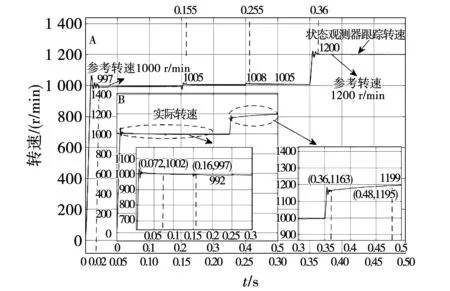
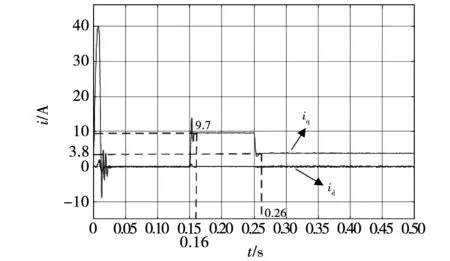
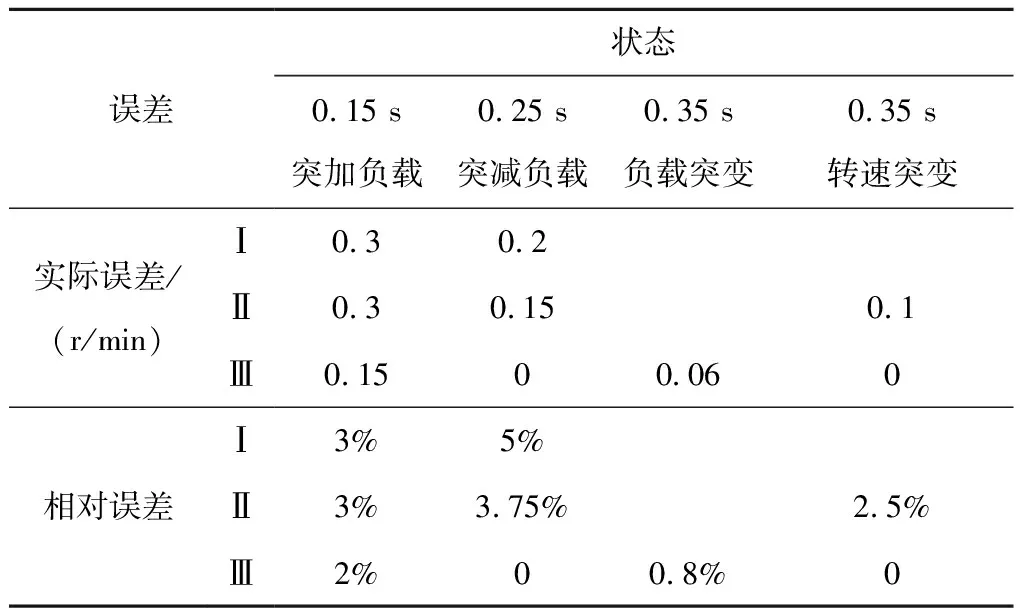
式中:x为状态误差变量;α>0;β>0;1 系统状态误差变量定义: (4) 对式(3)求导,并结合式(4)得 (5) 为进一步减小抖振,提高系统观测精确度,采用具有连续特性的继电函数或饱和函数sat(s)来代替传统趋近律中的开关函数,但sat(s)的使用会导致控制时间延长,且有可能对系统造成冲击,导致系统稳定性下降。因此采用连续函数υ(s)=s/|s|+ψ代替传统趋近律中符号函数sgn(s),得控制器为 ks+ηs/|s|+ψ]。 (6) (7) 根据李雅普诺夫第二法(亦称为直接法),选取Lyapunov函数为 V=0.5s2, (8) 则 (9) 将式(7)代入式(9)中,得 -ks2-ηs2/|s|+ψ≤0。 (10) 满足Lyapunov稳定性定理,说明系统能够在有限时间内收敛到稳定状态。 考虑模糊控制,取模糊控制器中趋近律参数μ作为输出变量,并根据李雅普诺夫综合方法[23]对趋近律重新设计如下: f′=-η|s|Ms/(|s|+ψ)-ks|s|N= -η|s|γ1ξbη[s/(|s|+ψ)]-ks|s|γ2ξbη。 (11) 式中:0<γ<1;ξ、b为正常数。 将f′代入iq中,得改进后的电流控制器为 ks|s|N+ηs|s|M/|s|+ψ]= ks|s|γ2ξbη+ηs|s|γ1ξbη/|s|+ψ]。 (12) (13) 式中A=diag{-Rs/Ls,-Rs/Ls}。 对于SPMSM来说,其扩展反电动势为 (14) 为了能够准确地获得电机扩展反电动势的估计值,设计观测器为 (15) 式(15)减式(13),得电流的误差方程为 (16) 用具有光滑连续特性的连续函数υ(s)=s/|s|+ψ代替sign函数以减小抖振,设计滑模控制律为 (17) 当观测器的状态变量达到滑模面之后,观测器的状态将一直保持在滑模面上,根据滑模控制的等效控制原理,此时的控制量可看作等效控制量[15],可得 (18) 当获得电机的扩展反电动势估计值后,可进一步计算得到电机角速度估计值,对于SPMSM有 (19) 电机的电角速度与机械角速度关系为 ωe=ωmnp。 (20) 图1 机械角速度估计模块Fig.1 Mechanical angular velocity estimation module 在调速系统中,传统方法是利用PI控制器以及电流、转速误差信号进行控制,但其动态性能受限。考虑负载扰动及参数变化时,依然采用原有控制方法,系统稳定性不能得到保证。可利用扩张状态观测器对扰动进行跟踪并反馈到前项SMC进行补偿,提高系统精确度和稳定性。式(1)中的速度为 (21) 考虑负载扰动和相关参数变化时,式(21)变为 (22) 式中:A=3npψf/2J;C=-B/J;D为综合干扰且D=Δ1ωm+Δ2iq-(1/J+Δ3)TL,Δ1、Δ2、Δ3分别代表各参数的变化量。 根据式(5)、式(12),重新设计控制器如下: ηs|s|γ1ξbη/|s|+ψ+ks|s|γ2ξbη]。 (23) 式(23)所得控制器中含有综合干扰项D,其值未知,需要对综合扰动量D进行估计。根据式(22),可将综合干扰项D作为扩张状态观测器系统状态变量,得到扩张状态方程为: (24) 给出传统SPMSM二阶扩张状态观测器[24]: (25) 其中:fal(e,ε,δ)为滤波函数;η1跟踪机械角速度ωm;η2观测综合扰动D;μ1、μ2为误差校正系数;ε为系统的非线性系数;δ为滤波系数。 基于传统二阶ESO,为了能够更精确地对负载扰动进行估计,同时提高扩张状态观测器的自适应调节能力,结合滑模控制原理,设计一种新型滑模扩张状态观测器。根据式(24),同时参考式(25),观测器设计为: (26) 式(26)减去式(24),得误差状态方程为: (27) 式中e1、e2分别为机械角速度ωm与综合干扰项D的估计误差。 图2 结合滑模控制的新型扩张状态观测器Fig.2 New extended state observer combined with sliding mode control 当满足下列条件时,系统将进入滑动模态,即滑模到达条件可以等价为[15] (28) 结合式(27)、式(28),滑模到达条件可重新表述为 e1(Ce1+e2+μ1e1/|e1|+ψ)<0。 (29) 根据e1的正负,重写式(29)为: (30) 即 (31) 因此,参数μ1可表述为μ1=-k|e2+Ce1|,一般k=2即可满足条件[25]。 (32) 根据一阶非齐次线性微分方程的通解公式 解得 (33) 式中C1为常数。为确保综合扰动项D的估计误差能够在有限时间内收敛至0,μ2的取值应大于0。 新型滑模扩张状态观测器能够实现对负载扰动的实时精确跟踪,同时能够将其反馈至SMC速度控制器中进行补偿,提高系统稳定性与精确度。根据式(23),得到滑模控制器输出 ηs|s|γ1ξbη/|s|+ψ+ks|s|γ2ξbη]。 (34) 设计Lyapunov函数证明其稳定性,结合式(3)、式(5),对式(8)求导并将式(30)代入得 (35) 设计的速度控制器和扩张状态观测器能够满足系统在有限时间内收敛到稳定状态。 基于图3的无速度传感器控制框图,在MATLAB/Simulink中构建SPMSM无速度传感器控制系统如图4所示,其中模块wmm为式(19)得到的机械角速度估计值。 图3 基于模糊滑模与新型扩张状态观测器的SPMSM无速度传感器控制框图Fig.3 Block diagram of SPMSM speed sensorless control based on fuzzy sliding mode and new extended state observer 图4 非奇异快速终端模糊滑模控制的SPMSM无速度传感器控制系统Fig.4 SPMSM speed sensorless control system based on non-singular fast terminal fuzzy sliding mode control 为了分析本文所设计控制器的控制性能,在MATLAB中进行验证,同时对比传统非奇异快速终端滑模与普通观测器共同作用的无速度控制[22]。结合图1~图4,进行非奇异快速终端模糊滑模控制与新型滑模扩张状态观测器共同作用的SPMSM无传感器系统搭建。采用id=0的控制策略,ode45算法,仿真时间0.5 s。电机空载启动,分两种情况给定负载扰动,一种为阶跃式负载扰动给定,如下: (36) 一种为非线性负载扰动给定,如下: (37) 同时,在0.35 s时转速突变为1 200 r/min,各仿真参数如表2~表4所示,仿真结果如图5~图16所示。 表2 SPMSM参数Table 2 Parameters of SPMSM 表3 逆变器与SVPWM参数Table 3 Parameters of inverter and SVPWM 表4 Fuzzy-SMC及其他参数Table 4 Parametersof fuzzy-SMC and others 实际情况下,由于电机的非理想化、运行环境等因素影响,控制性能会对某些参数敏感(k、α、β、J):α、β会影响系统超调量、状态改变后的调节时间、转速跟踪精确度;k会影响转速到达参考值的时间与能力;J会影响调节时间和抗扰动能力。合理选取相关参数能够增强系统控制效果。 图5为负载阶跃扰动时负载转矩对比波形图,图6为负载阶跃扰动、0.35 s转速突变负载转矩对比波形图,图7为负载非线性扰动、0.35 s转速突变负载转矩对比波形图。图5~图7内的小图为普通观测器负载转矩观测值与实际值对比波形图。表5为系统状态改变后的调节时间,表6为系统状态改变后的负载转矩观测值。 图5 负载阶跃扰动时负载转矩对比波形图Fig.5 Load torque comparison waveform with step disturbance 图6 负载阶跃扰动、0.35 s转速突变负载转矩对比波形图Fig.6 Load torque comparison waveform with step disturbance and 0.35 s speed sudden change 通过对比三图看出,当负载阶跃扰动时,新型扩张状态观测器能够很好地估计负载扰动量。在0.35 s转速突变时,有着很好地观测精确度与调节效果,经过0.013 s即可恢复到稳定状态(4 N·m);当负载非线性扰动时,新型扩张状态观测器依然有着很高的估计精确度,基本能够实现对负载转矩的无误差跟踪;0.35 s转速突变时,经过0.007 s即可恢复到稳定状态,说明新型扩张状态观测器应对非线性负载扰动时,调节效果更好。 图7 负载非线性扰动、0.35 s转速突变负载转矩对比波形图Fig.7 Load torque comparison waveform with load nonlinear disturbance and 0.35 s speed sudden change 表5 状态改变后的调节时间 由表5可知,设计的新型观测器较普通观测器不同情况下系统运行状态改变时,调节时间更短。表中:Ⅰ、Ⅱ、Ⅲ分别为负载阶跃扰动,负载阶跃扰动、0.35 s转速突变,负载非线性扰动、0.35 s转速突变3种情况;N、T分别为新型滑模观测器和普通观测器。 由表6及图7可知,新型观测器在系统状态改变后,负载转矩的观测误差更小,跟踪精确度更高。负载非线性扰动时,普通观测器在0~0.15 s负载增加阶段,存在约0.15 N·m的观测误差,而本文设计的新型观测器,除在前0.025 s存在较小误差外,整个负载增加过程都能实现对负载转矩的精确跟踪。表6中:Ⅰ、Ⅱ、Ⅲ分别为负载阶跃扰动,负载阶跃扰动、0.35 s转速突变,负载非线性扰动、0.35 s转速突变3种情况;N、T分别为新型滑模观测器和普通观测器。 表6 状态改变后的负载转矩观测值 图8~图10分别为负载阶跃扰动时,实际与估计转子角速度波形图、负载阶跃扰动且0.35 s转速突变,实际与估计转子角速度波形图、负载非线性扰动且0.35 s转速突变,实际与估计转子角速度波形图。其中电机机械角速度与转速转换关系为 (38) 由图8可得,0.15 s突加负载时,存在一定超调,系统经过0.01 s,角速度达到105.6 rad/s(约为1 008 r/min),此后稳定运行在105.4 rad/s左右(约1 006 r/min);0.25 s突减负载,系统经过0.01 s,角速度达到105.5 rad/s(约1007 r/min),此后稳定运行在105.3 rad/s左右(约1 005 r/min)。由图9可得,电机角速度分别经过0.01与0.006 s达到105.3与105.7 rad/s,0.15 s突加负载、0.25 s突减负载时,依然存在一定超调,0.37 s稳定运行时,角速度为125.7 rad/s(约1 201 r/min)。由图10可以看出,0.15 s突加负载与0.25 s突减负载,系统分别经过0.004、0.002 s,电机角速度达到104.9(约1 001 r/min)、105.2 rad/s(约1 004 r/min),基本无超调,0.35 s转速突变后,系统稳定在125.6 rad/s(约1 200 r/min)。 图8 负载阶跃扰动,转子角速度对比波形图Fig.8 Waveform of rotor angular velocity comparison with load step disturbance 图9 负载阶跃扰动、0.35 s转速突变转子角速度对比波形图Fig.9 Waveform of rotor angular velocity comparison with load step disturbance and 0.35 s speed sudden change 图10 负载非线性扰动、0.35 s转速突变转子角速度对比波形图Fig.10 Waveform of rotor angular velocity comparison with load nonlinear disturbance and 0.35 s speed sudden change 图8~图10对比可以看出,针对单一负载阶跃扰动、负载阶跃扰动与转速突变共同作用,系统在突加负载、突减负载时存在较大超调(4.2、1.1 rad/s;4.6、1.2 rad/s),且稳定后与参考角速度之间存在一定误差(约1 rad/s);当负载非线性扰动与转速突变共同作用,0.15与0.25 s负载情况变化时,系统超调很小(0.7、0.2 rad/s),稳定时角速度与参考角速度之间误差更小(约0.4 rad/s),鲁棒性更好。说明本文设计的速度控制系统,应对非线性扰动时,调节效果更好。 同时,从0.15、0.25及0.37 s的局部放大图可以看出,设计的角速度估计模块能够很好地对电机的机械角速度进行估计,跟踪精确度高,误差小于0.1 rad/s。 图11为负载阶跃扰动给定时,系统转速对比波形图;图12为负载阶跃扰动给定、0.35 s转速突变,系统转速对比波形图;图13为负载非线性扰动给定、0.35 s转速突变,系统转速对比波形图。其中图11~图13中的B图为采用非奇异快速终端滑模控制策略各情况实际转速波形图。 图11 负载阶跃扰动时转速对比波形图Fig.11 Waveform of speed comparison with load step disturbance 由图11中A图可知:1)经过0.016 s,系统转速由0上升至1 000 r/min,此后一直保持在1 005 r/min运行,运行相对稳定,误差不超过1%,同时状态观测器能够很好地实现转速跟踪;2)0.15 s突加负载和0.25 s突减负载后,由于非奇异快速终端模糊滑模面的作用,系统调节时间很短,经过0.01 s转速再次达到1 005 r/min附近稳定运行,状态观测器也能够很好地跟踪转速且基本无误差。 对比图11中A、B图可知,当单一负载阶跃扰动时,本文采用的控制方法较传统新型非奇异快速终端滑模控制方法,转速由0上升至1 000 r/min的时间更短(0.016、0.06 s),在负载突增突减时,虽有一定的超调,但稳定后转速误差更小(5、2,11 r/min)。 由图12中A图可知,当负载阶跃扰动、0.35 s转速突变时:1)系统转速从0上升到1 000 r/min并稳定运行的时间(0.02 s)虽略有增加(增加0.004 s),但稳定运行后依然能够保持在1 000 r/min左右(±3 r/min)运行,且基本无抖振。2)0.15 s突加负载和0.25 s突减负载后,系统调节时间进一步减小(0.005 s),且稳定运行后转速与参考转速之间的误差相对减小。3)0.35 s转速突变后,系统经过0.01 s即可恢复到稳定状态1 200 r/min,调节时间很短且运行过程中基本无抖振。3个状态下,新型扩张状态观测器都能实现转速的实时精确跟踪。 对比图12中A、B图可知,当负载阶跃扰动和转速突变共同作用时,本文采用的新型非奇异快速终端模糊滑模控制较传统方法而言,系统由0上升至1 000 r/min的时间、系统状态改变后的调节时间更短(0.02、0.055、0.01,0.072、0.01、0.13 s),稳定运行时转速误差更小。 图12 负载阶跃扰动、0.35 s转速突变转速对比波形图Fig.12 Waveform of speed comparison with load step disturbance and 0.35 s speed change 由图13中A图可知:1)系统经过0.02 s转速从0上升至1 000 r/min并稳定运行;2)0.15 s负载突变时,基本无超调,系统依然能够维持在1 000 r/min稳定运行;3)0.25 s突减负载,经过0.004 s系统达到1 006 r/min并稳定运行,虽有一定误差(6 r/min),但转速曲线平滑,系统抖振下降;4)0.35 s转速突变,系统经过0.012 s(相对增加0.002 s)达到1 200 r/min并稳定运行,调节速度较快。3个状态下,新型扩张状态观测器同样能实现转速的精确跟踪,且基本无估计误差。 同时对比图13A、B可知,本文采用的新型非奇异快速终端模糊滑模控制较传统方法而言,应对负载非线性扰动时调节效果更好,系统转速上升至稳定、0.35 s转速突变系统恢复到稳定的时间也更短(0.02、0.012 s;0.08、0.1 s)。 图13 负载非线性扰动、0.35 s转速突变系统转速对比波形图Fig.13 Waveform diagram of speed comparison of system with load nonlinear disturbance and 0.35 s speed change 对比图11~图13可知,由于非奇异快速终端模糊滑模面与新型扩张状态观测器的共同作用,系统调节能力与抗扰动能力增强,系统抖振减小,运行更加稳定。同时,设计的新型状态观测器能够很好地跟踪转速,跟踪精确度高,误差不超过1%。同时给出转速误差表,如表7所示。表中:Ⅰ、Ⅱ、Ⅲ分别为负载阶跃扰动,负载阶跃扰动同时0.35 s转速突变,负载非线性扰动同时0.35 s转速突变3种情况。 表7 转速误差 图14为负载阶跃扰动时d、q轴电流响应波形图,图15为负载阶跃扰动、0.35 s转速突变d、q轴电流响应波形图,图16为负载非线性扰动、0.35 s转速突变d、q轴电流响应波形图。对比三图可知:1)由于采用id=0的控制策略,实际测得的d轴电流能够稳定在0 A;2)q轴电流基本能够跟随电磁转矩,同时d、q轴电流响应基本不受负载扰动的影响,能够快速且相对准确地跟踪负载转矩的变化。 图14 负载阶跃扰动时d、q轴电流响应波形图Fig.14 Waveform of d and q axis current response when load step disturbance 由于采用id=0的控制策略,因此d轴电流基本保持在0 A附近,正负误差不超过0.1 A;对q轴参考电流进行设计并控制,因此q轴响应电流在系统运行状态改变时会存在超调,同时由于运行过程中受多种因素影响(如电机参数、温度、转速等),导致响应电流值与参考值之间存在一定误差,但误差保持在5%以下,且当负载非线性扰动时误差更小,说明此控制策略对非线性扰动的控制效果更好,精确度更高。同时给出q轴电流响应误差表,如表8所示。 图15 负载阶跃扰动、0.35 s转速突变d、q轴电流响应波形图Fig.15 Waveform of d and q axis current response when load step disturbance and 0.35 s speed sudden change 图16 负载非线性扰动、0.35 s转速突变d、q轴电流响应波形图Fig.16 Waveform of d and q axis current response when load step disturbance and 0.35 s speed sudden change 表8 q轴电流响应误差 表8中:Ⅰ、Ⅱ、Ⅲ分别为负载阶跃扰动,负载阶跃扰动同时0.35 s转速突变,负载非线性扰动同时0.35 s转速突变3种情况。 本文结合非奇异快速终端滑模面与模糊控制设计速度控制器;根据滑模控制思想,设计新型扩张状态观测器,对负载扰动进行精确跟踪与实时观测。仿真结果表明: 1)非奇异快速终端滑模面的使用能够提高系统收敛速度,同时模糊规则和模糊趋近律的设计能够对函数切换增益进行有效估计,从而提高系统的调节能力和运行稳定性。 2)结合滑模控制原理设计的角速度估计模块能够实现对电机机械角速度的精确估计,误差小于0.1 rad/s;新型扩张状态观测器的设计,解决了传统ESO自适应调节能力差的问题,能够实现对负载扰动和电机转速的快速准确跟踪。同时,能够将扰动量反馈至前项速度控制器中进行补偿,提高系统动态性能。 3)本文提出的控制方法针对负载非线性扰动时,控制效果更好,调节速度更快;同时转速误差小于1%,q轴电流响应误差小于5%,响应与调节时间不超过0.02 s,调节效果与控制性能优越。 本文所提方法从仿真角度基于理想电机模型进行有效性验证与效果对比。实际情况下,电机模型的非理想化、运行环境、实际电机参数与仿真不同等诸多因素会对控制效果产生影响,以致调节时间与超调量增加、抗扰动能力变差、抖振无法减小至仿真达到的效果等,下一步将在实物平台开展工作进行验证。


3.2 速度信号获取





4 新型滑模扩张状态观测器设计
4.1 观测器设计



4.2 参数分析及稳定性证明



5 仿真验证



5.1 负载转矩实际值与观测值对比



5.2 机械角速度估计值与模型输出角速度对比



5.3 实际转速与观测器跟踪转速对比



5.4 d、q轴电流响应对比


6 结 论
猜你喜欢
中学生数理化·八年级物理人教版(2021年9期)2021-11-20 06:00:28
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
攀枝花学院学报(2021年5期)2021-10-19 02:52:58
大学物理(2021年2期)2021-01-25 03:26:18
天津教育·下(2018年9期)2018-07-13 08:25:47
大陆桥视野·下(2017年9期)2017-09-17 15:11:21
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36