
基于电子式互感器的分布式行波测距装置
2022-08-20 07:09:38王振华牟涛周东杰朱付强赵会彬马志敏
电力电容器与无功补偿 2022年4期
王振华,牟涛,周东杰,朱付强,赵会彬,马志敏
(许继集团有限公司,河南 许昌 461000)
0 引言
高压输电线路是电力系统中重要组成部分,担负着电力能源运输的重要责任,由于交直流输电工程一般线路较长、跨越地形复杂,作为电力系统中最容易出现故障的环节,线路故障的查找异常困难[1-4]。输电线路测距系统的作用就是在线路故障发生后,能够准确计算出故障点发生的位置,便于运行人员迅速查明故障点短路的原因,及时准确地进行故障定位和修复故障线路,保证输电线路的供电可靠性[5-7]。伴随着行波信号提取、高速数据采集、数据传输等相关技术的逐步成熟,多种行波故障测距系统先后被成功研发,国内外己有多种行波故障测距装置投入实际运行[8-12]。
行波测距系统能够完成故障点的定位,广泛应用于智能变电站的故障诊断和故障定位[13-14]。目前国内的行波测距系统基本都是基于传统互感器,传统互感器目前存在绝缘难度大、动态范围小、安全性差、体积大、成本高等缺点。特别是传统互感器存在波形容易饱和的特点,严重影响测距系统在高频突变情况下波形采集的真实性,是影响行波测距系统精度的重要原因[15-16]。而电子式互感器是未来的发展方向,特别是基于罗氏线圈的电子式电流互感器目前已经非常成熟,相比较传统电流互感器来说,其测量精度更高,动态范围更优秀,能大大提升测距精度的同时,克服传统互感器波形易饱和的缺点,符合未来的发展方向[17-19]。但是,基于电子式互感器的行波测距系统需要专门的数据采集和数据传输方式,以应对高速化和智能化的要求,因此,传统的测距系统由于结构以及测距方式等因素,无法适用于电子式互感器,研究基于电子式互感器的分布式行波测距系统,对于提升行波测距的精确性、可靠性和高速性具有非常重要的意义[20-22]。
1 电子互感器分布式行波测距的基本架构
基于电子式互感器的行波测距系统主要包括两部分,分别是行波测距主机和采集子机(简称子机)。子机由至少一个采集装置构成,行波测距主机与子机的安装方式见图1。对于任意一个采集装置,包括两部分,分别是基于罗氏线圈原理的电子式电流互感器及行波测距高速采集子机。采集子机采用三相一体设计,与电子式电流互感器采用就地化方式安装,能采集单个线路的A、B、C 三相电流信息。采集装置的个数根据实际要求进行设定,本设计单台测距主机最大支持连接8 台采集装置。
行波测距主机上有两种数据端口,分别是以太网通讯端口和同步信号发送端口,分别对应图1 中的以太网口和同步口。子机进行实时数据采集,并判断故障,当发生故障时,测距子机启动故障录波,并向主机发送故障请求,主机响应故障请求后,向子机召唤录波信息,然后进行行波测距的运算。
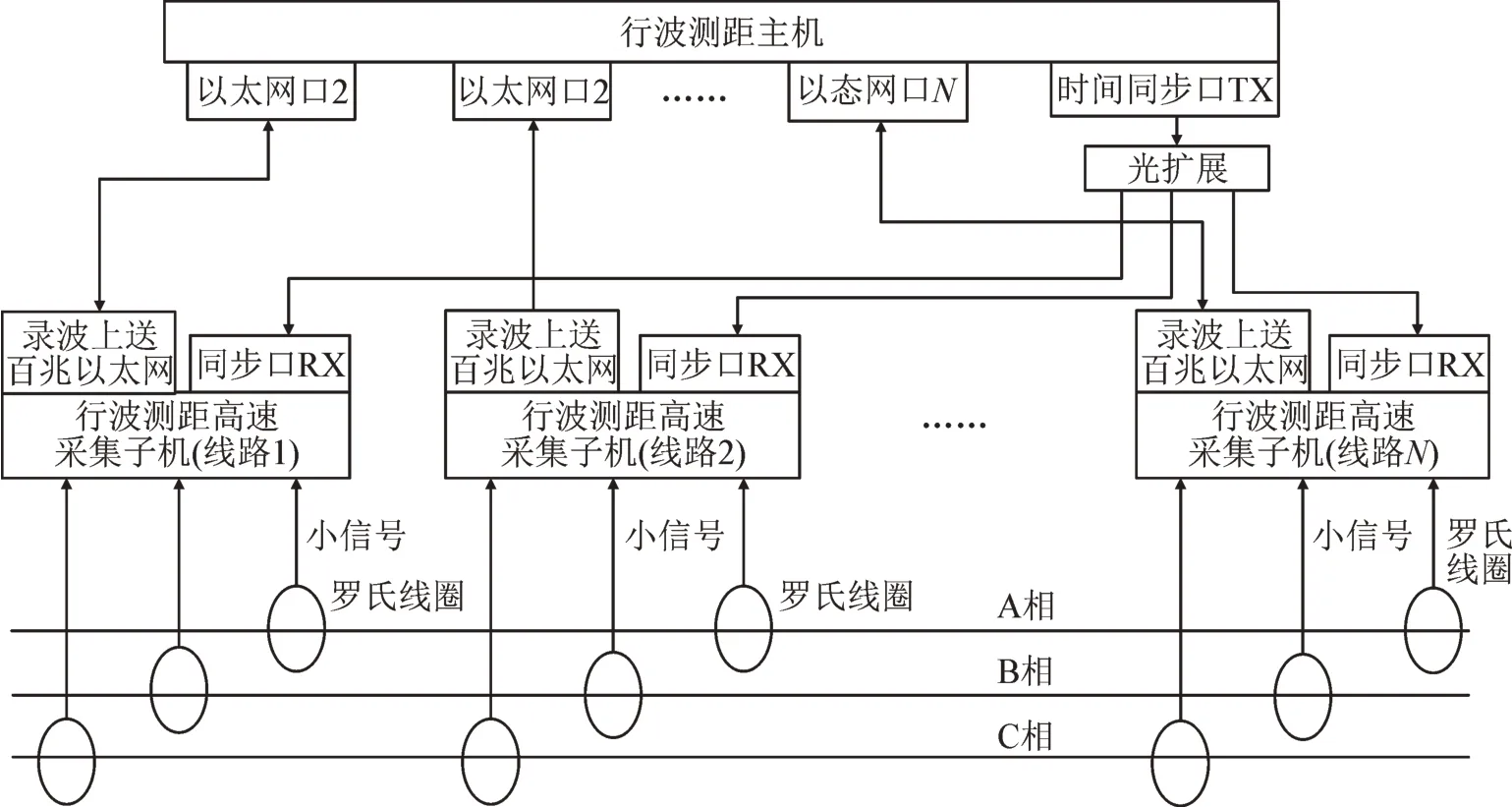
图1 基于电子互感器的分布式行波测距系统Fig.1 Distributed traveling wave ranging system based on electronic instrument transformer
2 分布式行波测距数据流传输
基于电子式互感器的分布式行波测距系统其主机与子机的数据交互如下:当其中一个子机判断系统发生故障时,该子机通过GOOSE 格式的报文向主机发送故障录波请求,主机接收到该子机的故障录波请求后,通过GOOSE 报文向各子机发送故障录波应答,并向各子机发送故障录波启动时刻,各子机根据故障录波启动时刻完成录波,录波完成后通过TFTP 协议向主机发送故障录波报文。图2 所示为子机与主机的通讯数据流图。
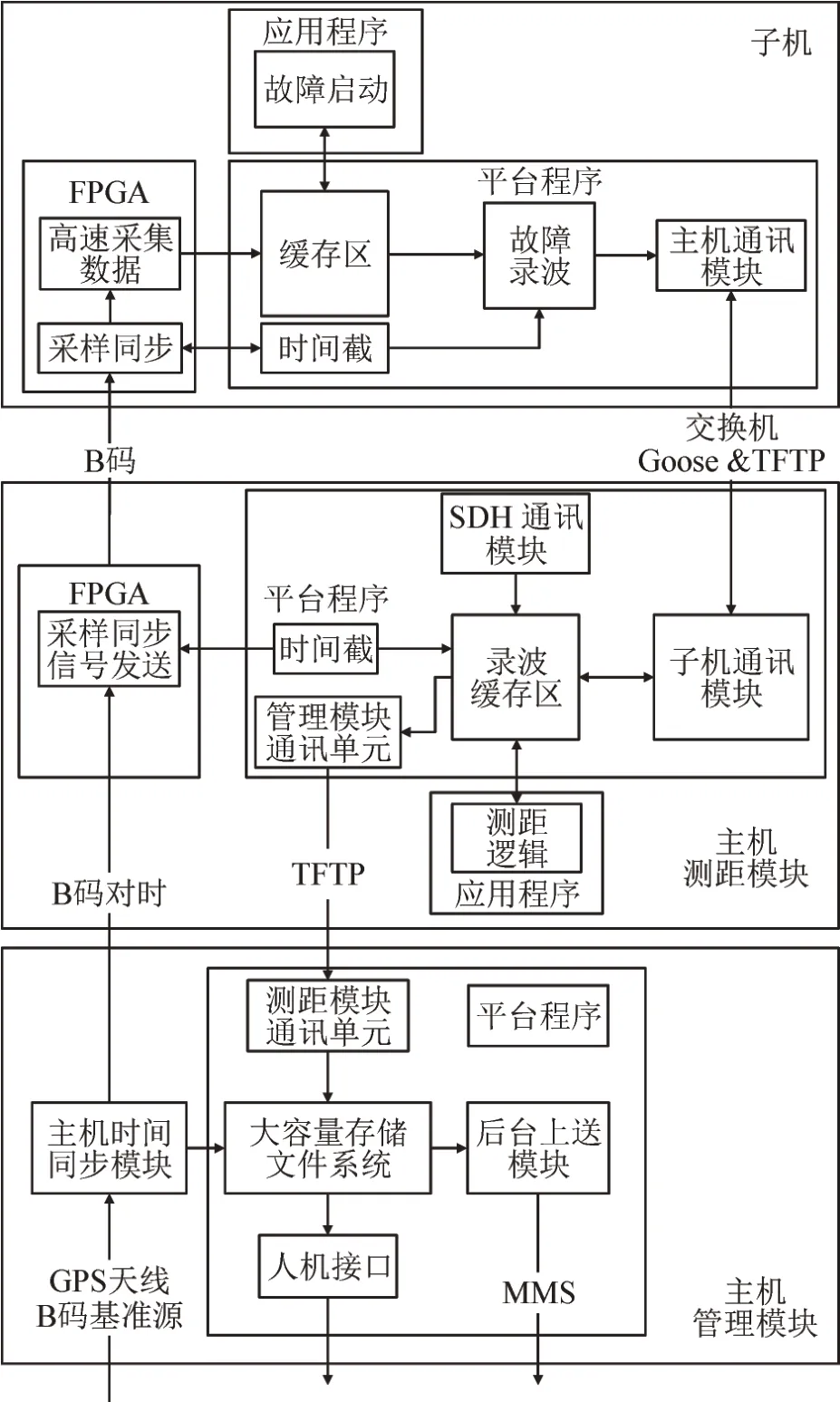
图2 主机及分布式子机的数据流交互Fig.2 Data flow interaction between host and distributed sub machines
一个主机通过交换机连接多个间隔的子机,各子机与主机之间通过光以太网介质进行数据通讯,每个子机都有独立的IP 地址,主机与子机之间的报文需要经过交换机,主要协议为GOOSE 协议与TFTP 协议。
主机主要由管理模块、测距模块、时间同步模块3 部分组成。主机的测距模块用于与子机进行数据通讯,接收子机的录波报文,完成测距算法,并将测距结果发送给主机的管理模块。同时将子机的录波文件进行合并,通过TFTP 协议发送给主机的管理模块。
主机的管理模块具备大容量录波存储功能,最多能存储2 000 条录波信息。同时管理模块负责测距结果的最终后台上送、人机接口等功能。
主机的时间同步模块能够接收GPS 或者北斗的对时信号,并转换为B 码报文,同步主机的管理模块、测距模块及子机。
子机对故障信号进行采样,完成启动判别,然后将故障录波的数据形成Comtrade 格式的录波文件。因为在实际操作中,录波数据比较大,上送报文时间比较长,为了保证录波上送过程中能够实时响应间隔大于20 ms 的下一次故障,保证录波数据的连续性和完整性,需要考虑录波的实时响应机制。因此子机需要开辟二级的录波缓存,第1 级缓存存储10 个周波数据,第2 级缓存存储3 个周波数据(故障启动前2.5 周波,启动后0.5 周波的数据),最多支持开辟10 块二级缓存。
当系统中的某台子机判断到线路上有故障启动时,先发送录波启动报文给主机,并在报文中包含故障启动时间。主机收到单台子机的请求报文后,给所有的子机发送录波应答报文,并将故障启动时间转发给所有子机。子机收到主机的录波应答信号后,根据启动时间在一级缓存中定位录波启动数据,将一级缓存中有效的录波数据搬移到二级缓存并锁定,数据内容遵循故障启动前2.5 周波,启动后0.5 周波的原则。然后将数据转换形成录波文件,通过TFTP 协议将录波报文上送主机。
由于comtrade 格式录波文件的限制,录波数据的时间信息只能精确到μs,而采样数据最高需要精确到500 ns,为了后级同步精度的需要,需增加一个通道的录波,通道的内容为采样点的序号(时标)。因此一组录波文件最少包含4 个通道,通道1 到通道3 分别记录输电线路A 相数据、线路B 相数据、线路C 相数据,通道4 为采样序号数据。单个录波文件大小为960 kB。
录波文件采用标准的comtrade 格式,录波文件的命名格式见图3。录波文件的文件名标注为故障启动时刻,主机通过接收到的录波文件的文件名定位故障启动的具体时刻。

图3 录波文件命名格式Fig.3 The naming format of record file
由于comtrade 文件中的时间精度仅仅精确到微秒级别,无法满足测距时间要求到纳秒的精度要求,为了提升测距计算精度,主机需要根据录波文件的文件名重新计算采样点的精确采样时间。其文件名格式为故障启动时刻的时间,即包含具体的年月日及时分秒,最小精确到纳秒。主机解析录波文件时,采用录波文件名中的启动时刻加采样序号偏移地址的方式,将时间精度精确到0.5 μs,即需要在故障启动时刻TFILE_NAME的时间基础上,加上采样序号SAMPLE_NUM 与采样间隔(0.5 μs)的乘积,得到采样点的具体时间信息TSAMPLE_POINT,公式如下:TSAMPLE_POINT=TTFILE_NAME+0.5 μs*SAMPLE_NUM。
GOOSE 协议主要用来实现链路的监视及握手信号,TFTP 协议用来传输录波报文。子机在正常运行时,每5 s 发送一帧GOOSE 报文,用于子机断链的实时监测,子机一旦判断到故障启动后,立刻采用应答机制与主机发起数据的交互。应答机制先由子机发起请求,主机响应请求,并发送应答报文,应答报文中应该包含通讯的命令和数据信息,报文主要包括上行报文和下行报文。
其中,上行报文为子机发送给主机的请求信息,主要包含以下报文:
1)子机故障录波启动请求报文:包含启动采样序号、启动整秒时间、启动标志等数据内容。
2)子机录波上送请求报文:包含启动上送录波长度、故障类型(是否雷击故障)、录波启动时间信息等内容。
下行报文为主机发送给子机的应答信息,主要包含以下报文:
1)主机录波启动应答报文:包含启动时刻,对应子机IP 地址(A、B、C 三相广播)。
2)主机接收录波应答报文:对应子机IP。
3)主机接收成功应答报文:对应子机IP。
4)主机接收失败应答报文:对应子机IP,启动重发机制。
3 主机与子机数据交互逻辑
子机与主机的数据传输及握手交互逻辑见图4。

图4 主机与子机的数据应答机制Fig.4 Data response mechanism between host and sub machine
1)子机在正常运行状态下,实时进行2M 的高速数据采集,并实时将10 个周波的采样数据保存在一级缓存中;同时子机定时向主机发送GOOSE链路报文,让主机监视子机的运行状态。
2)当子机根据采样数据,判断到线路上发生故障时,子机向主机发送故障录波请求报文,主机接收到请求报文后,解析出故障启动的类型,时间等信息,向所有子机发送故障启动的应答报文(广播报文),报文中包含子机的启动时间,精确到纳秒级。
3)接收到主机启动录波命令的子机根据主机发送的启动录波的命令时间,在缓存中找到故障启动点的数据,生成录波文件。
4)准备好录波数据的子机向主机发送录波数据上送请求,一旦收到主机的应答报文(单播报文),就通过TFTP 协议将录波文件上送。主机成功收到录波文件后,发送接收成功报文,反之,发送接收失败报文,启动重发机制。
5)整个协议设置了超时机制,一旦请求端发现对端应答超时,则发送端要启动重发机制,保证系统的可靠性。
主机同步子机高速数据采集的同步机制见图5,子机的FPGA 接收主机的B 码同步信号,将其解析为同步的秒脉冲和年月日时分秒的时间信息,并通过寄存器与CPU 共享。子机通过恒温晶振对秒脉冲进行分频,产生2M 的采样同步信号,用来控制AD 的采样时刻。子机同时通过恒温晶振产生一个本地的32 位时间戳(精确到ns),并且给秒脉冲的时钟沿打时间戳。采样序号与秒脉冲对齐,整秒清零翻转。
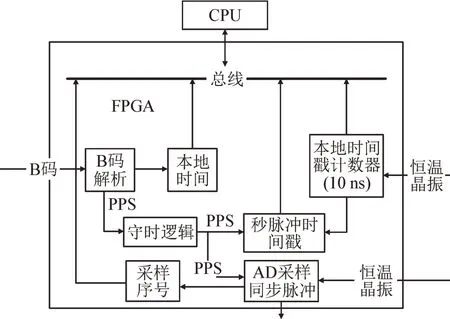
图5 高速数据采样的同步机制Fig.5 Synchronization mechanism of high speed data sampling
FPGA 将采样值、采样序号、整秒的时间戳、当前时间戳几个信息上送给CPU,CPU 将以上信息保存在缓存中,并在故障时刻,生成包含采样序号,采样时刻的录波报文。子机具备守时功能,能够在同步信号丢失10 min 达到1 μs 的守时精度,子机对主机同步信号进行倍频,产生采样同步脉冲,采样间隔离散性小于10 ns。
图6 所示为行波测距故障录波波形,我们可以看到基于电子式互感器的行波测距系统的录波能够更真实地记录和还原行波特征,配合小波算法,能够更精确地捕捉到行波波头,大大提升测距的精度。
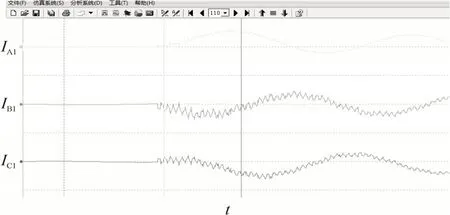
图6 行波测距故障录波Fig.6 The wave record of traveling wave fault location
4 结语
基于电子式互感器的分布式行波测距系统,克服了传统互感器动态范围小、容易饱和、影响采集精度的缺点。结合电子互感器的特点,采用分布式采集子机结合主机的特点,实现测距数据的分布式采集,集中运算。由于采用了主机和子机的实时交互方式,配合高精度高频特性好的罗氏线圈以及2 M的高速AD,线路长度在300 km 以下,双端测距误差不大于300 m;线路长度在300 km 以上,双端测距误差不大于500 m。
猜你喜欢
数学物理学报(2022年5期)2022-10-09 08:57:42
电气技术(2022年8期)2022-08-20 02:33:22
科学(2020年3期)2020-01-06 04:02:51
成都信息工程大学学报(2018年1期)2018-05-31 08:40:38
电子制作(2017年7期)2017-06-05 09:36:13
云南电力技术(2015年2期)2015-08-23 01:32:08
电测与仪表(2015年2期)2015-04-09 11:29:26
天津师范大学学报(自然科学版)(2015年2期)2015-03-11 18:46:50
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
广西科技大学学报(2015年4期)2015-02-27 12:22:22
