
基于改进下垂控制微网快速平滑并网/离网控制策略
2022-08-20 07:09:40高瑜张金刘建明范鑫
电力电容器与无功补偿 2022年4期
高瑜,张金,刘建明,范鑫
(西安科技大学电气与控制工程学院,西安 710054)
0 引言
微电网是指由光伏风机等新能源发电装置、电池组、变换器、用户等组成的小型发配电系统[1]。微电网的研究不仅能降低供电成本,同时也可以促进新能源的大规模接入,微电网既可以孤岛运行也可以并网运行,让配电方式更加灵活多变。
文献[2]设计了一个用于并网运行与孤岛运行的微型涡轮发电系统。文献[3]提出了一种新型的单相电网交互式逆变器,在并网模式下补偿滤波电容电流、控制电网电流,在孤岛模式下调节输出电压,从而达到离网/并网平滑切换的目的。文献[4]提出一种通过电压和电流控制之间的切换来实现相应算法,从而实现并/离网平滑切换。文献[5]提出了一种新型的单相离/并网逆变器拓扑结构。文献[6]针对并网和离网情况提出了不同的控制策略,通过其控制方法达到平滑并网的目的。文献[7]提出了一种适用于储能并网逆变器的广义控制算法,该算法实现微网输出电流所含有害扰动量的全补偿,最终实现微网运行模式平滑切换。文献[8]提出了一种不使用锁相环来实现锁相环既定作用的控制策略,实现VSG 离网与并网的平滑切换。文献[9]针对局部负荷不平衡需求引起的电力暂态波动,采用带状态跟踪策略的功率跟踪控制系统,使运行模式转换过程中的电压和频率的瞬态波动最小。文献[10]为单相分布式发电机开发了一种模型预测控制器,该控制器能使微网离/并网实现无缝过渡。文献[11]设计了通过优化负载突变暂态过程中的频率恢复曲线,实现了VSG 逆变器在并网和离网两种模式下的稳定运行。文献[12]设计了一个LADRC 抗扰线性控制器,用于补偿切换过程中的扰动,从而抑制电压、电流扰动。
目前解决微网系统并网时产生的电压、电流畸变冲击主要依靠传统的PQ 控制与V/f 控制的转换,或引入虚拟同步电机[13-17]。传统的PQ 控制与V/f控制的转换在控制方式进行切换时,电流内环的参考电流将发生暂态突变,从而引起变换器输出电流出现暂态冲击,导致微网运行状态切换时发生振荡和冲击。现有的虚拟同步发电机实现方式都需要在控制策略中植入类似同步发电机机电特性的环节以模拟其惯性,添加了额外的控制环节,实现过程比较繁琐[18-22]。基于下垂控制的微网快速平滑并网/离网控制策略研究相对较少,且现有的研究对微网离网/并网引起的暂态冲击抑制效果有待改善。
本文研究了下垂控制策略应用于微网系统快速平滑并网/离网的可能,提出了参考功率追踪实际计算功率的改进型下垂控制,抑制了微网两种运行模式切换时引起的暂态冲击。为解决上述控制策略功率对频率、电压调节作用失效问题,设计参考功率控制器在不同应用场合下赋值给参考功率不同的值。同时在控制器中引入惯性环节,抑制因参考功率切换逆变器输出电流突变带来的冲击。在微网并网运行时,利用大电网钳位作用,切换参考功率值为逆变器输出功率所需值,实现逆变器输出功率可调。
1 微网结构及控制策略研究
1.1 微网结构
微网通过公共连接点的关断与闭合可以在不同运行模式间进行切换,有效地解决了微网系统电能过剩和电能不足的问题,以微网系统一次侧的整体架构搭建的实验仿真平台拓扑结构见图1。微网运行模式的突然切换会引起系统产生暂态冲击,不利于系统的稳定运行。随着新能源在能源结构中占比的提高,大规模分布式电源接入电网,抑制微网运行模式切换引起的暂态冲击,微网系统快速平滑并网/离网的研究意义日益凸显。

图1 智能微电网拓扑结构图Fig.1 Topological diagram of intelligent microgrid
1.2 传统下垂控制策略研究
下垂控制可以实现并网模式和孤岛模式的平滑切换[23]。
下垂控制中,有功/频率与无功/电压的关系为

式中:P0为计算有功功率;Q0为计算无功功率;P*为有功功率参考值;Q*为无功功率参考值;ω0为角频率测量值;U0为电压测量值;ω*为角频率参考值;U*为电压参考值。
传统的下垂控制策略下,在实际工程中由于线路阻抗的存在,会影响下垂控制对系统频率、电压的稳定作用[24]。不仅如此,传统的下垂控制策略较为依赖下垂控制系数的设定。在系统并网时,系统发生暂态冲击,P0将突变为一个较大的值,导致ΔP=P0-P*过大,为满足同期并网频差条件,下垂系数将设定为较小的值,但下垂系数过小会降低功率对系统频率、电压的调节能力,系统频率、电压振荡时功率变化非常大才能使其稳定在标准值内,可能超出设备输出功率能力,对电气设备造成损害。
在下垂控制中,令

当微网由孤岛并网后,由于大电网的钳位作用,有

此时要使式(1)成立,则有P0=P*,即系统并网稳定后,逆变器输出功率即为下垂控制设定的功率参考值,不能灵活调节逆变器的输出功率,从而不能最大程度上输出电能。
传统下垂控制策略的结构框图见图2。光伏电池输出电能经逆变器逆变后输出交流电流经LC 滤波器滤波后向本地负载供电,在并网模式下,过剩电能可以向电网传输,电能不足时电网也可以给微网补偿[25]。传统下垂控制采集电感电流以及公共连接点电压,经dq 变换、计算功率后得到有功功率、无功功率计算值,再经下垂控制、电压合成、电压电流双闭环控制,最终生成SVPWM 调制信号,控制逆变器开关通断[26]。

图2 传统下垂控制策略结构框图Fig.2 Structural block diagram of traditional droop control strategy
2 并/离网快速平滑切换控制策略研究
2.1 改进型下垂控制策略
传统下垂控制策略采集滤波器电感电流反馈双闭环控制以增强抗短路能力,但其动态响应速度慢,微网因运行模式切换时引起暂态冲击,要求能在更短时间内重新达到稳态,以减轻对系统的波动与电气设备的损害,此时采集滤波器电感电流反馈双闭环控制已不能满足系统要求,故在改进型下垂控制策略中采集滤波器电容电流反馈双闭环控制,这样能大大增强系统的动态响应速度,在微网运行模式切换时,减少各电气量突变周期,使微网快速平滑离网/并网。
传统下垂控制为减少采集量,在采用滤波器电感电流反馈双闭环控制的同时,将滤波器电感电流用作功率计算部分,但上述已说明改用滤波器电容电流反馈双闭环控制的原因,故在功率计算部分,采集滤波器输出交流母线电流用作功率计算部分,滤除谐波后,功率计算值更接近系统负载消耗实际值。
将功率计算得到的功率P0、实时赋值给参考功率,即令:

则可使并网前后

根据式(1)可知,当ΔP=0 时,有

根据式(7)可知,改进型下垂控制微网可不依赖下垂系数的设定来满足同期并网频差条件,不仅如此,在微网并网前后,下垂控制可以给电压电流双闭环控制一个稳定的频率,不受系统功率冲击的影响,对微网模式切换前后的暂态冲击起到了抑制效果。
改进型下垂控制策略结构框图见图3。
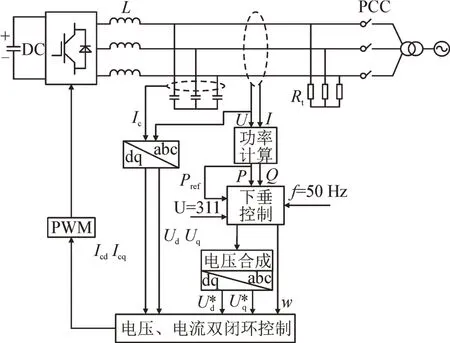
图3 改进型下垂控制策略结构框图Fig.3 Structural block diagram of improved droop control strategy
上述控制策略尽管对系统暂态冲击起到了一定的抑制效果,但会使有功功率对系统频率的调节作用失效。并且仍旧无法达到微网并网时逆变器输出功率可调的目的,无法使逆变器最大程度输出电能。下面将设计参考功率控制器解决上述问题。
2.2 参考功率控制器设计
参考功率控制器拟实现预期功能各步骤如下。
步骤1:在微网孤岛运行时,将参考功率设定为固定值30kW,以保证下垂控制功率对系统频率、电压调节能力的有效性。
步骤2:微网主动并网前令参考功率由固定值切换为追踪实际计算功率,抑制微网因并网引起的暂态冲击。在控制方式进行切换时,变换器输出电流将出现暂态冲击[15]。为迟滞变换器输出电流的突升,在控制器中引入惯性环节。
惯性环节的运动方程为

式中:T为时间常数;K为惯性环节增益;x(t)为输入时间信号;y(t)为输出时间信号。
拉普拉斯变换后,惯性环节传递函数为
对已经步入工作岗位的会计人员或已经取得会计专业技术资格证的会计人员进行专业培训,目的是为了提高会计人员的职业素质、业务能力、道德水平、思想政治素养,确保其更好的适应新时期经济发展的要求。为了切实提高会计人员的工作能力、专业素质和职业道德水平,确保会计人员能够紧跟国家经济发展动态,不断更新知识水平和专业能力,财政部规定会计人员每年必须进行定期的培训教育,在这一背景下,各个领域也都采取各种形式对会计人员进行定期的继续教育。

本文所提出的控制器在并网前某一时刻参考功率由固定值切换为实际功率计算值,输入时间信号x(t)为阶跃信号,将其拉普拉斯变换后有

根据式(9)可得公式为

令将输出时间信号利用拉普拉斯反变换由复频域转化为时域为

图4 为K=1、T=1 时惯性环节单位阶跃响应,由图4 我们可以看到,惯性环节阶跃响应有一个缓慢增长的过程,可抑制参考功率的突变使微网并网时逆变器输出电流突增。

图4 惯性环节单位阶跃响应Fig.4 Unit step response of intertia link
步骤3:当惯性环节输出时间信号即参考功率达到并网所需值时,微网并网,此时根据图4,惯性环节输出时间信号仍在增长中,但此时我们已达到抑制因参考功率切换时引起的暂态冲击的目的,故微网并网瞬间可将参考功率切换为未引入惯性环节的实际功率计算值。
步骤4:并网后利用大电网的钳位作用,微网频率、电压稳定。根据式(2)与式(4),为使式(1)成立,则必有P0=P*,即逆变器输出功率即为参考功率值。利用这一点,在微网并网后可根据用户需求调整逆变器输出功率。在本文中切换参考功率为固定值P1=40 kW,利用大电网的钳位作用,可以控制逆变器输出功率为40 kW。若该步骤有需要,可省略步骤3,在并网时刻即将参考功率切换为用户所需逆变器输出功率。
步骤5:系统主动离网前将参考功率切换为计算功率,准备离网。
步骤6:微网离网后再次将参考功率切换为固定值30 kW,利用下垂控制维持微网电压、频率稳定。
该参考功率控制器的优越性主要体现在既利用了改进型下垂控制有效抑制了微网运行模式切换时引起的暂态冲击,又能解决该改进型下垂控制有功功率对频率调节作用失效的问题,且实现了微网并网运行时下垂控制下逆变器功率可调的目的,并且在微网运行全过程都能使其稳定运行。
3 仿真结果及分析
3.1 传统下垂控制策略仿真结果及分析
图5 为传统下垂控制下,负载功率为20 kW,功率参考值为30 kW,在0.4 s 时刻并网,0.8 s 时刻离网,逆变器输出有功功率、无功功率、并/离网前后交流母线电压、母线电流、系统频率波形。
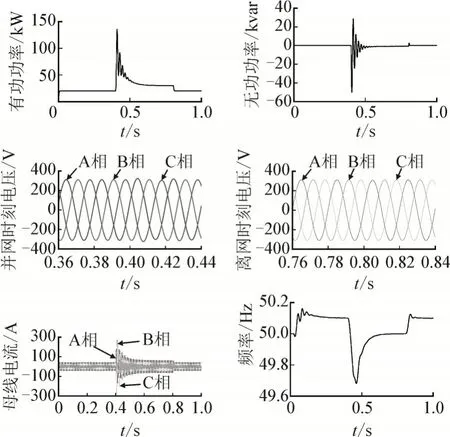
图5 传统下垂控制微网并网/离网仿真波形Fig.5 Simulation waveform of grid connection/off grid of traditional droop control microgrid
由图5 可得,并网时逆变器输出有功功率最大突变至126.5 kW;无功功率最大突变至-50 kvar;交流母线电压并网时最大突变至324.5 V,4 个周期后重新达到稳定值,离网时最大跌落至306 V,一个周期后重新达到稳定值;交流母线电流并网时最大突变至293 A,约0.2 s 后稳定至65 A;整个过程系统频率在49.68~50.17 Hz 之间。传统下垂控制下微网并网引起的暂态冲击对系统稳定运行造成了极大负面影响,特别是有功功率、无功功率,可能已经超出光伏电站对有功功率、无功功率的输出和调节能力,电流突变值也会造成系统安全隐患。
3.2 改进下垂控制策略仿真结果及分析
系统负载为20 kW,微网在0.4 s 时由孤岛转并网,微网在0.8 s 时由并网转孤岛,逆变器输出有功功率、无功功率、并/离网前后交流母线电压、母线电流、系统频率波形见图6。
由图6 可知:在整个仿真过程中,母线电压、电流波形未出现明显畸变,有功功率功率过渡平滑,无功功率最大突变至980 kvar,系统频率变化在49.96~50.08 Hz 之间。本文提出的改进型下垂控制策略能够有效抑制微网在运行模式切换时引起的暂态冲击,与传统下垂控制策略相比改善效果明显,实现了并网/离网的平滑切换。

图6 改进型下垂控制微网并网/离网仿真波形Fig.6 Simulation waveform of grid connection/off grid of improved droop control
3.3 引入参考功率控制器仿真结果及分析
令P0=30 kW,负载功率为20 kW,系统于0.4 s时刻切换参考功率准备并网,1 s 时刻并网,1.6 s 时刻离网。未加入惯性模块,逆变器输出有功功率、无功功率、并/离网前后交流母线电压、母线电流、系统频率波形见图7。
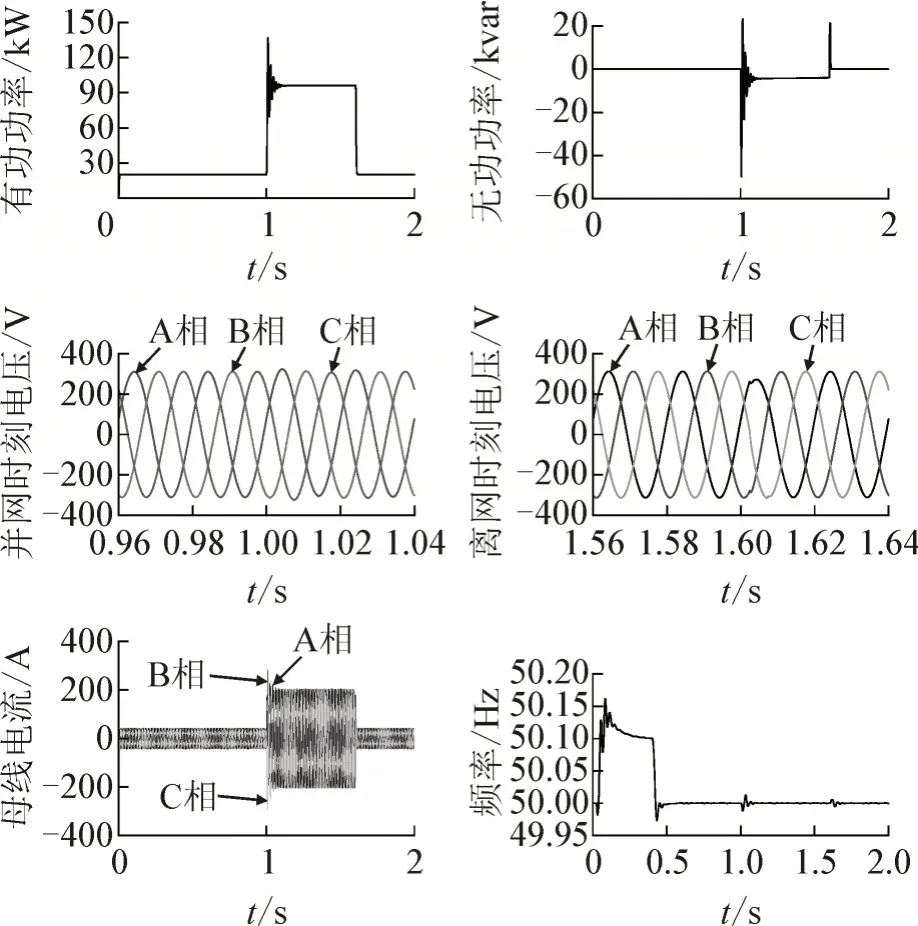
图7 未加入惯性环节微网并网仿真波形Fig.7 Simulation waveform of grid connection of microgrid without inertial link
由图7 可知:未加入惯性模块,微网并网时系统有功功率最大突变至137 kW,0.1 s 后稳定在96 kW,无功功率最大突变至23.6 kvar,0.1 s 后稳定在4 000 var,母线电压最大畸变至324.5 V,在4 个周期后重新达到稳定值,母线电流最大突变至286 A,6 个周期后稳定在205 A;微网离网时无功功率最大突变至21.5 kvar,母线电压最大跌落至273.3 V,整个过程系统频率变化范围在49.97~50.17 Hz 之间。切换参考功率而未加入惯性模块,逆变器输出有功功率、无功功率、母线电流、母线电压等值都已超出系统承受范围,对微网稳定运行造成了非常大的隐患。
令P0=30 kW,负载功率为20 kW,系统于0.4 s时刻切换参考功率准备并网,1 s 时刻并网,1.6 s 时刻离网,逆变器输出有功功率、无功功率、并/离网前后交流母线电压、母线电流、系统频率波形见图8。由图8 可知:加入惯性模块,微网并网时有功功率最大突变至30 kW,0.05 s 后稳定在27kW 左右,无功功率最大突变至-4 340 var,0.08 s 后稳定在450 var 左右;交流母线电压过渡平滑,交流母线电流在4 个周期后稳定在57.5 A;微网离网时无功功率最大突变至2 000 var,且迅速稳定,母线电压最大跌落至308 V,整个过程系统频率变化范围在49.85~50.17 Hz 之间。由此我们可以得出,加入惯性环节对参考功率切换时微网并/离网引起的暂态冲击抑制效果明显。
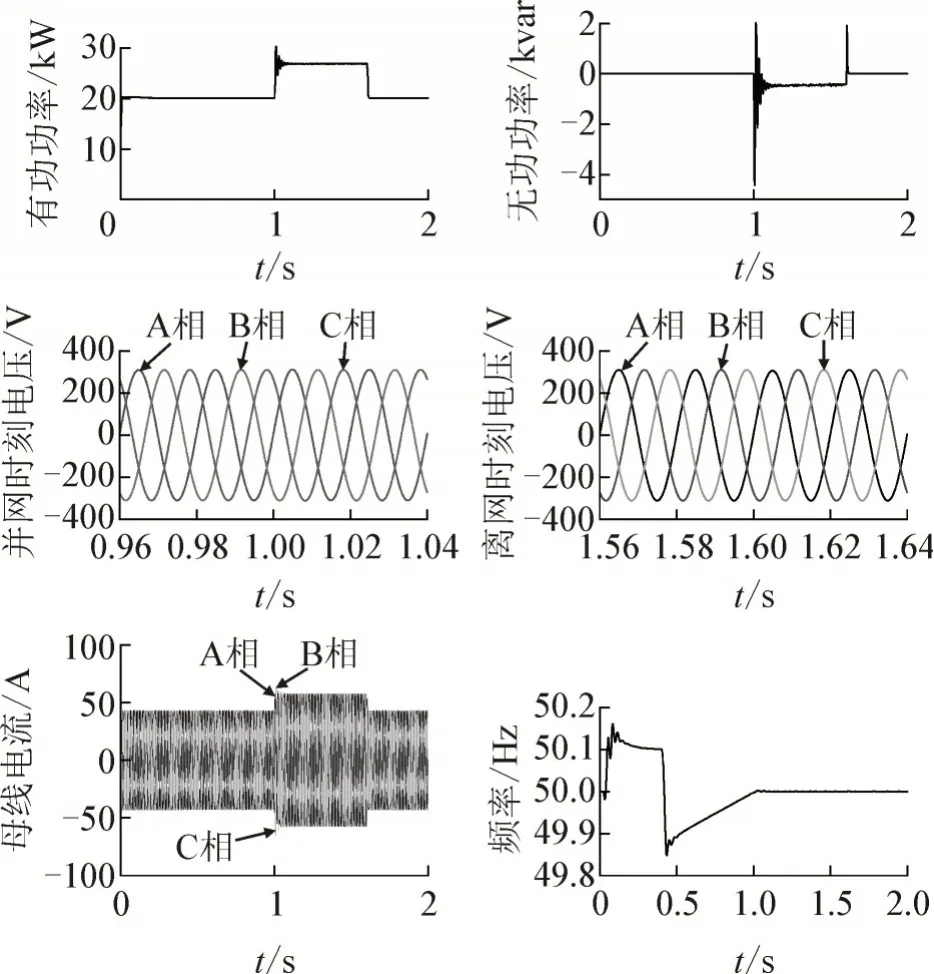
图8 加入惯性环节微网并网仿真波形Fig.8 Simulation waveform of grid connection of microgrid grid with inertial link
令P0=30 kW,负载功率为20 kW,加入惯性模块抑制逆变器输出电流,系统于0.4 s 时刻切换参考功率准备并网,1 s 时刻并网;稳定运行后于1.2 s 改变参考功率,使逆变器输出功率实现可调。令P1=40 kW;1.4 s 参考功率追踪计算功率值,1.6 s 微网由并网转孤岛;1.8 s 将参考功率切换回固定值P0=30 kW,由下垂控制保证微网电压、频率的稳定。逆变器输出有功功率、无功功率、并/离网前后交流母线电压、母线电流、系统频率波形见图9。由图9 可知:系统并网时有功功率最大突变至30.7 kW,0.08 s 后达到稳定值27.1 kW 左右,无功功率最大突变至4 300 var,0.08 s 后达到稳定值450 var 左右,母线电压几乎不畸变,母线电流在4 个周期后重新稳定;微网并网运行时利用大电网钳位作用,改变参考功率为40 kW,0.2 s 后可调节逆变器输出功率为39.8 kW,此时无功功率最大突变至-2 000 var;微网离网时无功功率最大突变至5 100 var,有功功率、母线电流在0.02 s 内重新稳定,交流母线电压最大跌落至301.6 V,一个周期后重新稳定。整个过程系统频率在49.85~50.17 Hz 之间,系统运行稳定,微网并/离网引起的暂态冲击得到了有效抑制,且实现了微网并网时逆变器输出功率可调的目的,最大程度输出电能。

图9 引入参考功率控制器微网并网/离网仿真波形Fig.9 Simulation waveform of grid connection/off grid of microgrid with introduction of reference power controller
4 结语
通过建立Matlab/Simulink 仿真模型,对本文提出的改进型下垂控制与设计的参考功率控制器进行仿真验证分析,通过分析和仿真得出以下结论:
1)微网孤岛运行时下垂控制参考功率设定为固定值,利用下垂控制功率对系统频率、电压的调节作用,维持系统频率、电压的稳定。
2)并网前使参考功率追踪系统实际功率并引入惯性模块,抑制参考功率切换时变换器输出电流并网时出现的暂态冲击。相比未引入惯性模块,系统并网时有功功率突变量减少91.45%,无功功率突变量减少81.61%,母线电压、电流几乎不畸变,对系统安全运行解决了极大隐患。
3)并网时使参考功率追踪系统实际功率,减少并网前后逆变器输出功率变化,系统有功功率、无功功率、母线电压、母线电流、频率等过渡平滑,有效地抑制并网引起的暂态冲击。
4)微网并网运行时,利用大电网的钳位作用对系统频率的控制改变参考功率值,使逆变器输出功率达到设定值的99.5%,实现了下垂控制下逆变器输出功率可调的目的。
5)离网前使参考功率追踪系统实际功率,减少离网前后逆变器输出功率变化,系统有功功率、无功功率、母线电压、母线电流、频率等过渡平滑,有效地抑制离网引起的暂态冲击。
6)离网后微网孤岛运行,令参考功率为用户设定固定值,利用下垂控制保证系统频率、电压的稳定。
实验结果证明本文提出的改进型下垂控制可有效抑制微网运行模式切换引起的暂态冲击,参考功率控制器可解决微网孤岛运行时上述控制策略有功功率对频率调节失效的问题,并实现微网并网运行时下垂控制功率可调。且参考功率设定值与计算功率值差值越大,改善效果越明显。
微网是一个复杂的非线性系统,本文仅针对光储微网进行研究,在后续的研究中,可以计入风机、储能等的影响,更好模拟实际工程中微网系统工作。为验证控制策略有效性,离网/并网与参考功率切换时间均为人为设定,后续可以在参考功率控制器中加入并网准同期检测等,增强控制器智能化与自动化。
猜你喜欢
大电机技术(2021年5期)2021-11-04 08:58:28
电子制作(2018年14期)2018-08-21 01:38:28
电子测试(2017年23期)2017-04-04 05:07:02
通信电源技术(2016年6期)2016-04-20 06:21:15
电测与仪表(2015年16期)2015-04-12 00:44:34
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年5期)2015-04-09 11:30:46
电测与仪表(2014年12期)2014-04-04 12:10:18
电测与仪表(2014年17期)2014-04-04 11:56:50
电力工程技术(2014年5期)2014-03-20 14:19:36
