
新型并联逆变器功率均分与环流抑制策略
2022-08-20 07:09:42施家博苗虹曾成碧
电力电容器与无功补偿 2022年4期
施家博,苗虹,曾成碧
(四川大学电气工程学院,成都 610065)
0 引言
分布式发电系统具有高度灵活性、低成本、环保节能等优点,因此目前已有诸多国家将其作为未来电力发展的研究热点。多逆变器并联技术则是分布式发电系统中一项重要的技术手段[1-3]。其中,由于下垂控制方法具有结构简单、扩容方便、功能冗余等优点,因此成为多逆变器并联运行系统中的关键技术[4-6]。
但在一些实际运行情况中,传统下垂控制法仍存在不足。比如,由于实际并联逆变器的地理位置等原因,连接至交流母线的线路阻抗存在差异,导致系统不能做到精确的功率分配,产生功率误差,线路间的环流增加,对逆变器设备造成负面影响,降低了系统性能。所以为了保证系统的稳定运行,一种有效实现功率均分和抑制系统环流的策略是必不可少的[7-10]。
针对上述问题,国内外学者提出了很多有效的解决方法,比如改变系统的拓扑结构,优化参数设计,引入虚拟阻抗的下垂控制法等。文献[11-12]中将逆变器等效输出阻抗设计调整为阻性,通过引入虚拟阻抗来减小不同支路间的电压偏差,进而抑制环流,但此方法忽略了线路阻抗中感性成分的差异造成的影响,并且造成线路压降增大,影响输出电压质量。文献[13]通过设置合适的虚拟电容值,重构了系统的等效阻抗,使其呈现容性特性,解决了功率耦合和均分的问题,但虚拟电容取值不易确定。文献[14]分析了系统环流产生的原因,并提出了主从控制策略,此方法将某一支路输出信号设为其他支路的基准值,以电压、电流、功率和混合信号4 种不同的方式进行控制,该方法控制结构简单,环流抑制效果好,但不易实现冗余。文献[15]对下垂控制进行了不同状态的划分,分别为无功均分、电压恢复与稳定运行3 种模式,此方法可实现系统稳定运行和功率均分,但他需要进行信号通信与逻辑判断,增加了系统的复杂程度。文献[16]引入了并联虚拟电阻,由此来构造虚拟电流,进而调节电流内环的参考值,以达到提高功率均分精度与环流抑制的目的,此方法的本质依旧是调整逆变器等效连接阻抗值,但由于是间接调节,涉及电流信号较多,所以信号采集易出现偏差,计算过程较为复杂。
为了有效解决功率均分与系统环流的问题,本文对基于传统虚拟阻抗的下垂控制器进行了深入研究。将逆变器输出电流进行基波与谐波的分离,在不同频域内引入虚拟阻抗,并对虚拟阻抗进一步设计,可以根据电流信号来进行实时微调,缩小线路之间的阻抗差异,以达到实现功率均分降低系统环流的目的。最后,通过仿真实验对此方法的可行性进行了验证。
1 并联逆变器环流分析
1.1 并联逆变器的等效模型
图1 为两台并联逆变器等效模型图。将公共连接点处的电压设为参考值UPCC∠0°,其中Ui∠φi为逆变器i(i=1,2)的电压相量;Ri为逆变器i(i=1,2)等效输出阻抗与所在支路上线路阻抗两者的阻性成分之和,即等效线路阻抗的阻性成分;Xi为逆变器i(i=1,2)等效输出阻抗与所在支路上线路阻抗两者的感性成分之和,即等效线路阻抗的感性成分。RL+jXL为负载值。

图1 并联逆变器等效模型图Fig.1 Equivalent model diagram of shunt inverter
式(1)和式(2)分别为逆变器i(i=1,2)的输出有功与无功功率表达式。
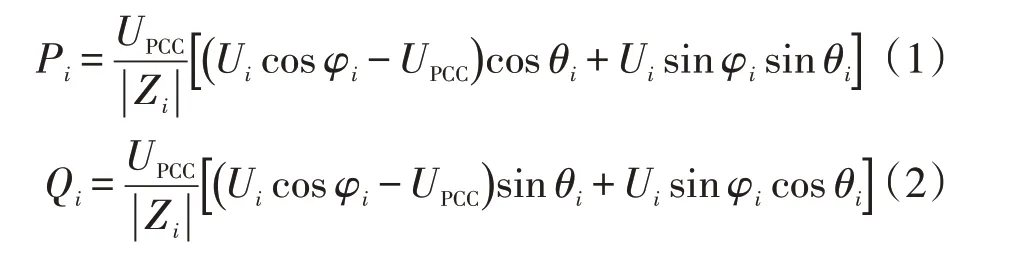
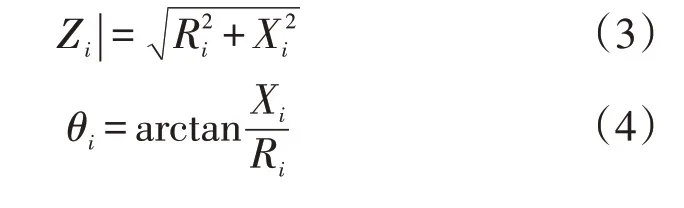
上述两式中的|Zi|与θi分别为阻抗幅值和阻抗角,两者的表达式为
实际情况中φi很小,可以认为sinφi=φi,cosφi=1。当并联逆变器系统中等效线路阻抗为感性时Xi>>Ri时,式(1)和式(2)可化简为
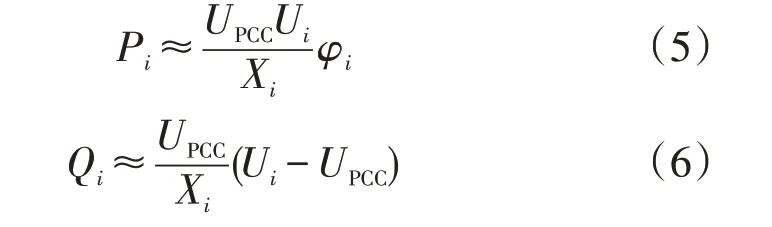
由式(5)和式(6)可知,Pi和Qi分别与相角差φi和输出电压Ui相关,且fi=(1/2π)×(dφi/dt)。所以通常对系统采用下垂控制法进行控制,公式为

式中:f、U、f0、U0分别为逆变器输出电压的频率、幅值、空载频率与空载幅值;m、n分别为有功功率和无功功率的下垂增益系数。
1.2 系统环流
1.2.1 影响环流的因素
根据图1 可以得到系统环流ih为
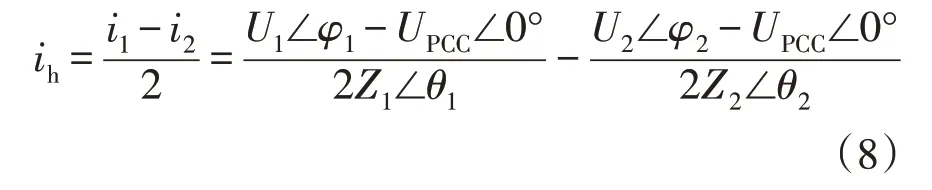
通常在系统中引入虚拟阻抗来改善控制系统性能,可以调节并联支路的等效线路阻抗的阻抗特性与大小。本小节中讨论当各支路等效连线阻抗近似相等且呈感性时影响环流的因素。则式(8)可简化为

根据式(9)可知,有功与无功环流的大小与线路感抗大小成反比关系,当U1=U2,φ1≠φ2时,主要为有功环流且与(φ1-φ2)大小成正比关系,当U1≠U2,φ1=φ2且φ很小时,主要为无功环流且与(U1-U2)大小成正比关系。
前文已提到,实际情况中φ很小,而且在传统下垂控制条件下,有功控制环节存在积分环节,所以φ1与φ2的差值一般很小,所以本文主要讨论无功环流的抑制,即减小U1与U2的差值。在无功控制环节中可以通过减小Q1与Q2的差值来实现。
1.2.2 减小无功差异的措施
图2 所示为传统Q-U下垂控制图。
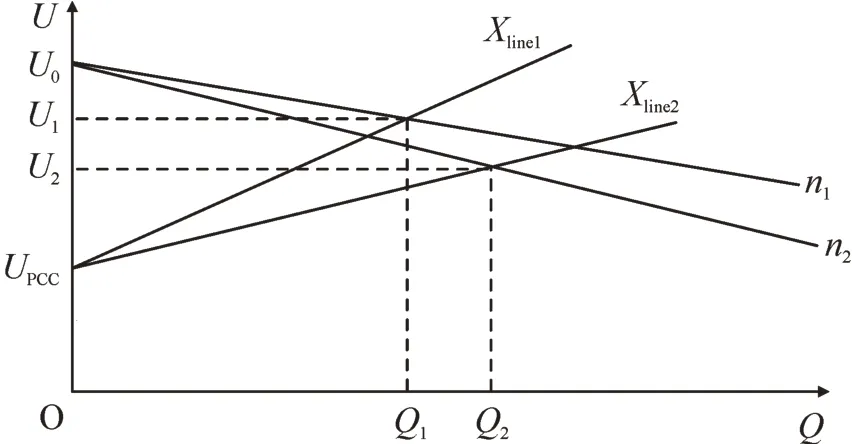
图2 传统的Q-U下垂控制图Fig.2 Traditional Q-U drop control diagram
由图2 可知,由于各个逆变器支路的Xi不同导致各逆变器的无功功率产生差异。
将式(7)代入(6)可求出

此时逆变器之间的无功相对误差为

由式(11)可知,若想减小无功相对误差的值,可以增加下垂系数n或者减小逆变器等效线路阻抗的差值两种方案。但下垂系数n过大时,会导致输出电压的大幅度降低。所以本文针对减小等效线路阻抗差异进行了对虚拟阻抗改进的研究,以此来减小无功误差,达到抑制环流的目的。
上述分析是在并联逆变器容量相同的情况下进行的,若容量不同,即逆变器1 与逆变器2 容量比为K:1 时,则需要将等效线路阻抗按照逆变器容量比进行反比设置,即X1:X2=1:K。
2 新型虚拟阻抗
为了减小并联逆变器之间的无功功率差异,达到系统环流减小的目的,本文提出了一种新型的复合虚拟阻抗,此虚拟阻抗在基波频域,谐波频域与总频域分别对等效线路阻抗进行改善。
系统的控制框图见图3。在图3 中,Lf与Cf为滤波电感与电容,iL为电感电流,Zline为线路阻抗,uo_abc与io_abc为逆变器输出电压与电流。

图3 系统控制框图Fig.3 Control block diagram of system
2.1 基于SOGI的基波频域虚拟阻抗
逆变器输出电流io_abc经过ip-iq谐波检测法进行基波与谐波的分离,得出基波电流iof_abc与谐波电流ioh_abc。在基波频域中,根据SOGI 法对虚拟阻抗进行构造,引入感性虚拟阻抗。
二阶广义积分算法(SOGI)是基于一个频率可调谐振器和两个级联的积分器闭环组成[17-18]。v与ω分别为输入信号与其频率,k为闭环系统的增益系数。此结构具有快速精准的跟踪输入信号的能力,并且可以有效抑制输入信号中的噪音[19]。
SOGI 的传递函数为

根据频域响应曲线可知,Hq(s)与Hd(s)分别相当于低通与带通滤波器,k值决定其带宽,k值越大,带宽越大[20-23]。相比于Hd(s),Hq(s)更不易被输入信号中的噪音影响,无需对时间求导,从而避免了微分运算将输入信号中噪声放大的隐患。假设A与ω分别为输入信号的幅值与频率,则经过SOGI 算法后得出vd(t)=Asin(ωt),vq(t)=-Acos(ωt)。
综上所述,当输入信号为电流信号时,可设计虚拟感性阻抗压降为

同理可设计虚拟阻性阻抗压降为

式(14)与式(15)中Lv为虚拟感性阻抗值,Rv为虚拟阻性阻抗值。本文将Rv设为0,Lv重新设计,使得此虚拟感性压降值可以根据不同线路的基波电流有效值来对其值进行自适应调整。其虚拟感性阻抗值表达式为

将式(16)代入式(14)可得公式为

式中:Iof为逆变器输出基波电流iof_abc的有效值,kf为基波频域感性虚拟阻抗值的调节系数;ωf为基波频率;Uvf为基波频域虚拟阻抗压降。
通过在基波频域内引入此虚拟阻抗,可以使得等效线路阻抗在基波频域中呈感性,满足传统下垂控制的条件,并且能减小各等效线路阻抗感性值的差异。
图4 所示为基于SOGI 方法的虚拟压降设计图。
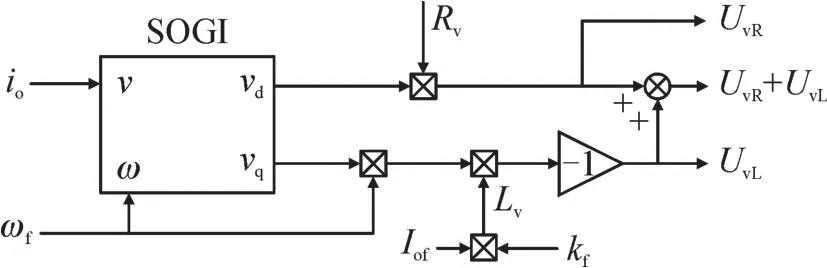
图4 基于SOGI方法的虚拟压降设计图Fig.4 Virtual voltage drop design diagram based on SOGI method
2.2 谐波频域与总频域虚拟阻抗
在谐波频域中引入阻性虚拟阻抗,可以使得谐波频域中的等效线路阻抗中的阻性特性增强,从而能降低谐波电流的产生。将通过谐波检测法分离出的谐波电流ioh_abc进行有效值运算得到Ih,将其与谐波频域感性虚拟阻抗值的调节系数kh相乘得到谐波频域虚拟阻抗值Zvh,其表达式为

此虚拟阻抗可以根据不同线路的谐波电流有效值来对虚拟阻抗进行自适应调整,以达到减小各支路在谐波频域内等效线路阻抗之间差异的目的。
在总频域中引入负阻性的虚拟阻抗,引入此阻抗的目的是抵消线路阻抗中的阻性成分,减小由线路阻抗引起的电压降落,提高逆变器的供电质量。虚拟阻抗Zvline表达式为

式中,α为负阻抗系数。
3 控制策略
在本文中,电感电流作为反馈信号[24-25],控制结构使用电压电流双闭环,具体结构图见图5。
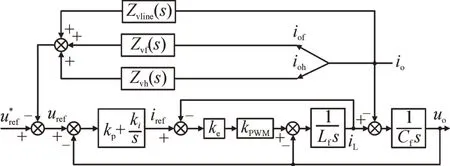
图5 电压电流双环控制结构图Fig.5 Voltage current double loop control structure diagram
图5 中,kp、ki和ke分别为双闭环中电压外环与电流内环中PI 控制器与P 控制器中的系数;kPWM为逆变器增益;Zvf(s)、Zvh(s)、Zvline(s)分别为基波频域、谐波频域与总频域内引入的虚拟阻抗;uref和分别为引入虚拟阻抗前后的电压环电压参考值;uo和io分别为逆变器输出的电压与电流值。
在引入虚拟阻抗前,由图5 可得uo为

电压比例增益传递函数GK(s)表达式和等效输出阻抗Zo(s)表达式分别为
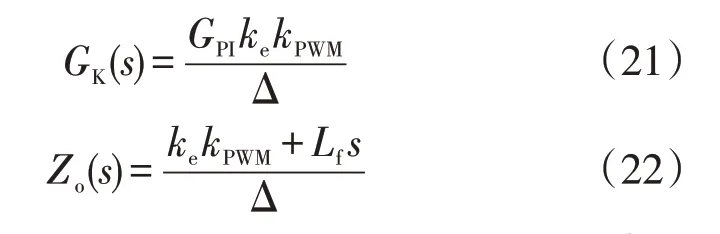
通常滤波电容Cf较小,可以忽略,所以可化简近似为Δ ≈GPIkekPWM+1。
在引入虚拟阻抗后,
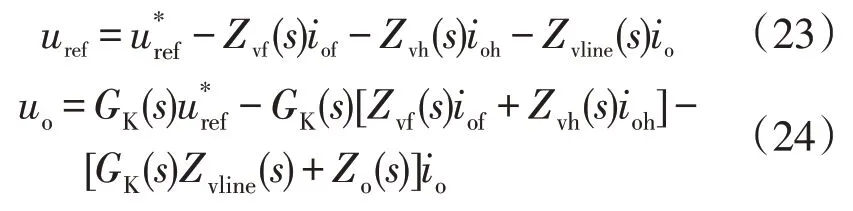
在基波频域与谐波频域中的逆变器等效阻抗表达式分别为
公共交流母线电压表达式为

设β=(Δ-1)/Δ,令α=1/β,将式(16)、式(18)-(19)、式(24)代入式(27)中可求得基波频域与谐波频域中的等效线路阻抗分别为

当逆变器线路阻抗中的感性值Lline较大时,相应的Iof与Ioh则较小;反之,当Lline较小时,相应的Iof与Ioh则较大。虚拟阻抗调节系数kf与kh分别对基波频域与谐波频域中的虚拟阻抗进行动态调节,进而使得各支路等效线路阻抗在基波频域与谐波频域中都能达到近似相等,减小了各线路之间的阻抗差异。
其次为了增强Zf的感性特性,kf的取值需满足式(30)所述条件。

同样,考虑到增强Zh的阻性特性,kh的取值首先要满足大于0 的基本条件,其次考虑到电压质量,令其谐波电压畸变率低于4%,则kh需要满足公式(31)所述条件。

式中,UJ为基波电压有效值。
4 仿真验证
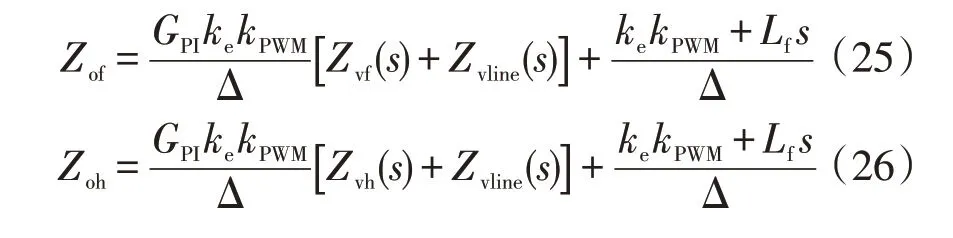
为验证本文所提的策略,本文基于Matlab/Simulink仿真平台,搭建了两台并联逆变器仿真模型。使用直流电源模拟替代分布式电源。表1 给出了逆变器单元的主要电气参数。分3 种情况下进行试验验证:情况1 和情况2 分别为在传统下垂控制条件下没有引入虚拟阻抗和引入本文提出的分频域虚拟阻抗时系统运行的情况,情况3 为引入传统虚拟阻抗时系统的运行情况,在这3 中情况中均满足以下条件:系统仿真参数的步长为5×10-6s ,仿真时间为3 s,两台逆变器并联运行,在交流母线上接入公共负荷。在0~1 s 内接入负荷1,1 s 时刻并入负荷2,当系统继续运行1 s 后,负荷2 断开与交流母线的连接,负荷1 仍保持接入母线状态直至运行结束。
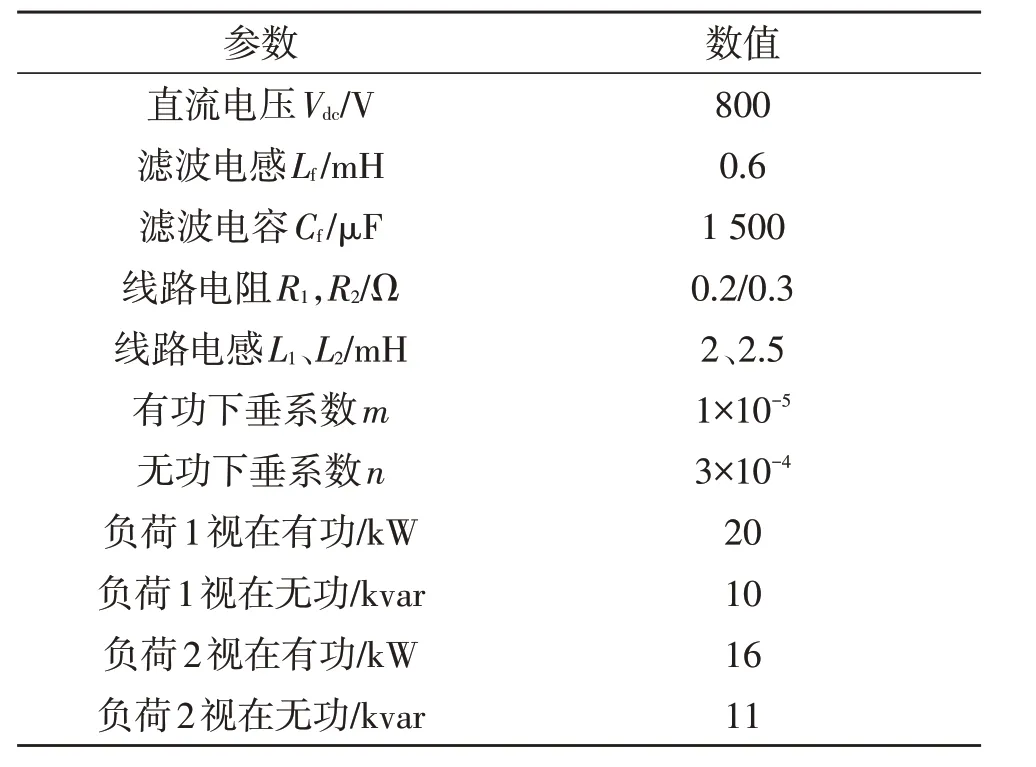
表1 逆变器相关参数Table 1 Related parameter of inverter
图6 和图7 分别是在情况1 传统下垂无虚拟阻抗时和情况2 引入本文提出的分频域虚拟阻抗时系统运行的仿真结果。
图6(a)和图7(a)所示为两台并联的逆变器所输出的无功功率的大小,很明显地可以看出,由于线路阻抗的不同,在传统控制条件下,两台逆变器的无功功率存在较大的差异,而在改进的控制策略下,无功功率的均分精度有很大提升。
图6(b)、图6(c)和图7(b)、图7(c)所示分别为在情况1 与情况2 下并联逆变器的输出的电流波形与系统环流波形。通过对比可以看出随着负载的增加,系统环流也会增大。但通过总体的情况来看,改进的控制策略使得系统环流有显著的降低,验证了改进策略的有效性。
图6(d)和图7(d)所示为在两种不同控制策略下的交流母线电压波形图,通过数据的对比可以看出,由于新型虚拟阻抗的引入,交流母线电压的下降程度有所缓解,提高了交流母线的电压质量。
图6 情况1传统下垂控制策略下仿真结果Fig.6 Simulation results under traditional drop control strategy in case 1

图7 情况2新型控制策略下仿真结果Fig.7 Simulation results under the new control strategy in case 2
图8 所示为情况3 下系统运行时并联逆变器输出的无功功率和系统环流的波形图。

图8 情况3系统运行仿真结果Fig.8 Simulation results of system operation in case 3
与情况1 中的波形图进行对比分析可知,引入传统虚拟阻抗可以使得并联逆变器输出的无功功率误差减小,系统环流降低。
根据图7(c)和图8(b)所示,当系统达到稳定时,情况2 中两种负荷情况下的环流值分别为0.1 A和0.3 A,情况3 中环流分别为1 A 和1.6 A,由此可知,本文所提方案环流抑制能力较强。
此外,由于情况2 中所添加自适应虚拟阻抗的原因,当负荷切换时,环流大小会短暂恢复到未添加虚拟阻抗时的大小。但经过0.2 s 的时间后,虚拟阻抗完全发挥作用,达到最佳环流抑制效果。整体来看,此方案优于传统的控制策略。
5 结语
本文提出了一种基于分频域虚拟阻抗的下垂控制方法来对并联逆变器进行控制,通过在不同频域里引入虚拟阻抗来对各个频域的等效线路阻抗进行实时调节与处理,减小线路间的阻抗差异。仿真结果证明,本文所提出的改进方法能在线路阻抗存在差异的条件下,可以实现功率的精确均分,有效抑制系统环流,同时也能提高交流母线的电压质量,灵活地应对负载变化,保证系统的稳定运行。
猜你喜欢
粮食问题研究(2022年2期)2022-04-25 22:50:57
测控技术(2018年9期)2018-11-25 07:44:40
雷达学报(2018年3期)2018-07-18 02:41:34
数学物理学报(2018年2期)2018-05-14 07:32:01
儿童故事画报·智力大王(2016年6期)2016-09-14 07:12:55
电测与仪表(2016年5期)2016-04-22 01:13:44
电测与仪表(2016年9期)2016-04-12 00:29:58
电测与仪表(2016年14期)2016-04-11 12:32:40
火控雷达技术(2016年1期)2016-02-06 02:17:55
无线电通信技术(2015年3期)2015-12-23 11:37:02
