
无零矢量作用的逆变器结构仿真研究
2022-08-19 03:03韦慧东王淑芬张志新
微电机 2022年7期
韦慧东,王淑芬,张志新
(大连大学 机械工程学院,辽宁 大连116622)
0 引 言
永磁同步电机以其功率因数高、运行平稳、过载能力强、动态性能好等优点,被广泛用于新能源汽车等的驱动上[1]。在PMSM驱动系统中常采用矢量脉宽调制(SVPWM)控制,这种控制方法会使得驱动系统产生电磁干扰,产生电磁干扰的原因是SVPWM控制产生了共模电压[2],共模电压能引起轴电压烧毁电机轴承。因此抑制共模电压对提高驱动系统的电磁兼容特性和安全性具有重要的意义[3]。
对于共模电压的抑制,学者们做了许多工作,主要有外加滤波器[4],改变SVPWM控制策略[5]和改变逆变器拓扑结构[6]这几种方式,外加滤波器可以分为无源滤波[7]和有源滤波[8],外加滤波器这种方法虽然能在一定程度下抑制共模电压,但是不能从根本上消除共模电压,并且针对不同的系统要使用不同的滤波器,通用性不好。改变SVPWM的控制策略,虽然能从根本上降低了共模电压,但是电机的输出特性在一定程度上变差,要结合滤波器的使用才会得到比较好的效果。文献[9]提出了四桥臂逆变器结构,该方案可将共模电压对消掉,但付出的代价太大,即改变了结构又改变了控制算法。
本文从分析无零序矢量脉宽调制(NZPWM)[10-11]的共模电压抑制机理入手,通过不改变SVM控制策略,让零矢量作用的时间段内,无电流流过逆变器,得到了一种简单的能有效抑制共模电压的逆变器结构。
1 共模电压产生机理
在分析无矢量控制前,需要分析共模电压是如何产生的,如图1给出了三相两电平逆变器的拓扑结构,在PWM逆变器中,共模电压定义为逆变桥输出中点对参考地之间的电位差,本文研究所选了永磁同步电机的驱动系统,所以星形连接的中点N对参考地的电位差即为共模电压uCM。
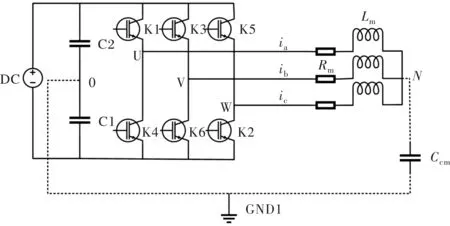
图1 三相两电平逆变器拓扑结构
由图1,根据基尔霍夫电压定律可得:
(1)
式中,uUO、uVO、uWO为逆变器各相的输出电压,ia、ib、ic是对应各相的输出电流,Rm与Lm为对应永磁同步电机的各相电阻和电感。
将式(1)中的三个式子相加得:
(2)
又因为ia+ib+ic=0,所以由式(2)可得共模电压:
(3)
因此共模电压的大小与三相的输出相电压直接相关,三相输出相电压又与K1-K6开关管的工作状态有关,当K1导通K4断开时,uUO=udc/2当K4导通K1断开时,uUO=-udc/2。由于每相桥臂有两个开关管,故三相逆变器有8种工作状态,定义为S0-S7,如表1所示得出8种工作状态的输出相电压和共模电压的大小。
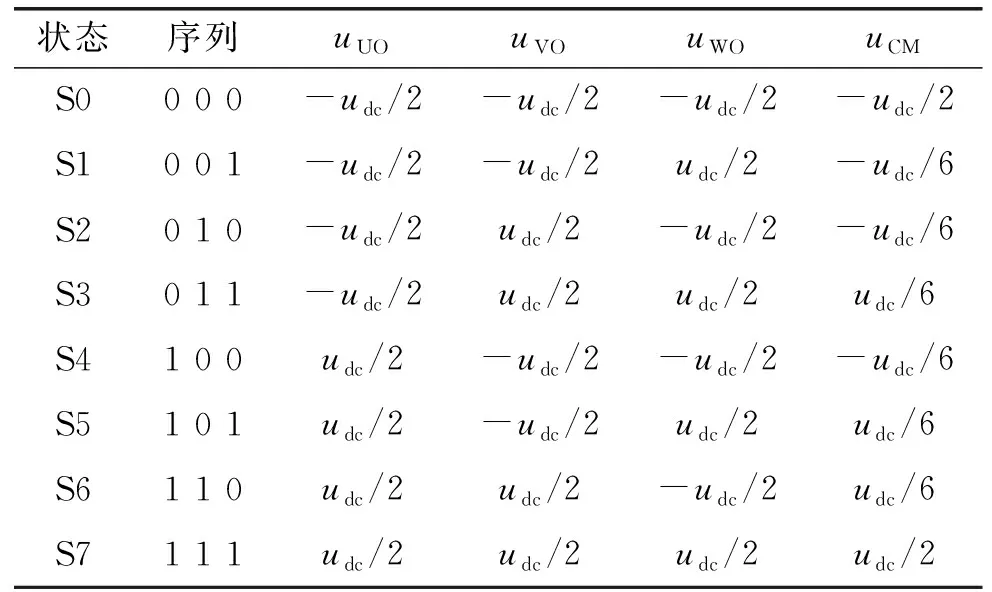
表1 各开关状态所产生的相电压和共模电压
由此可以看出共模电压有±udc/6,±udc/2四种,且幅值为udc/2的两种状态都是零矢量引起的,又因为零矢量作用的状态在电机内是不能形成通路的,因此就产生了通过无零矢量控制的控制策略来减小共模电压思路。
2 NZPWM调制机理
无零矢量脉宽调制(NZPWM)通过运用其他矢量来替代零矢量的作用效果,就使得在零矢量工作时的udc/2的共模电压变成了其他状态的udc/6,进而减小了共模电压的幅值。根据NZPWM的原理诞生了如随机状态矢量脉宽调制(RSPWM),主动零状态脉宽调制1(AZSPWM1), 主动零状态脉宽调制3(AZSWPM3)等几种调制方式,RSPWM控制策略主要是通过各相差1200的开关状态S4、S2、S1(或者S6、S3、S5)固定调制,如图2(a)所示。AZSPWM1是通过其他6个开关状态来替换零开关状态,用S2、S5,S3、S4,S1、S6来替代S0和S7,如图2(b)所示,AZSPWM3是通过对应扇区中两个开关状态和其中一个工作状态成1800相差的工作状态相结合来替代零矢量的作用,如图2(c)所示。
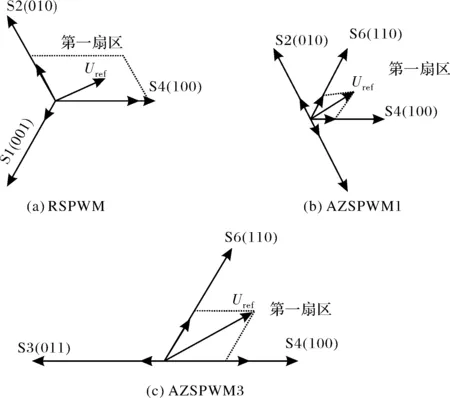
图2 NSPWM的电压空间矢量图
现定义S4、S6、S2、S3、S1、S5状态所对应的电压为V1、V2、V3、V4、V5、V6,这些电压的幅值等于2/3udc,图2中的矢量Uref可以通过对应的静态矢量进行拟合,并且满足伏秒特性,即Uref与PWM开关周期Ts的乘积与静态矢量和其作用时间乘积的和相等。因此根据伏秒特性可以求出各静态矢量的作用时间,由于篇幅有限,本文省略了推导过程,设其调制因数为ma:
(4)
RSPWM调制策略在第一扇区由V1,V3和V5进行参考电压的合成,各矢量的作用时间为
(5)
其中,T1、T3、T5分别是V1、V3、V5的作用时间,θ的取值范围由0到π/3。
AZSPWM1调制策略在第一扇区是通过V1、V2、V3、V6来进行参考电压合成的,各矢量的作用时间分别为
(6)
式中,Ta、Tb分别为V1、V2的作用时间,T0为V3和V6作用时间的和,分别的作用时间为T0/2,θ的取值范围由0到π/3。
AZSPWM3的调制策略在第一扇区是通过V1、V2、V4来进行参考电压的合成的,各矢量的作用时间分别为
(7)
式中,Ta、Tb、Tc分别是V1、V2、V4的作用时间,θ的取值范围由0到π/3。
对于其他扇区时,各矢量作用时间等式依然成立,只是有一个转换关系:
θ′=θ-(k-1)π/3
(8)
k为对应的扇区数,判定调制策略的好坏需要关注其调制因数ma,这直接影响着直流电压的利用率,如果调制处于超调状态时,达不到理想的输出。当矢量的作用时间出现负值时,说明在这种状态下,调制策略处于超调状态。
通过对式(5)~式(8)的分析,我们可以得到AZSPWM1只要θ不等于0和π/3,它的矢量作用时间都大于0,同时对于AZSPWM3发现只要θ不等于0,或ma=1且θ不等于π/6时,它的矢量作用时间都大于0,说明AZSPWM1和AZSPWM3可工作在整个调制区间。然而对于RSPWM,计算太复杂。我们通过Matlab画出了它在Ts=0.0001 s,调制因数ma=0.1、0.5、0.7、0.9这几种情况下矢量作用时间和位置的图,如图3所示。

图3 RSPWM的T1、T3和T5工作空间
可以分析在第一扇区内当ma=0.7时,作用时间就出现了较多的负值,随着ma的增大,作用时间出现负值就越多。因此RSPWM适用于低调制因数的场合,在调制策略中不常用,因此在后续分析中不再对此方法进行仿真研究。
又因为AZSPWM3是五段式PWM算法与SVM,AZSPWM1的七段式PWM算法不同,因此在后面的仿真研究中,我们采用AZSPWM1代表NZPWM与改变逆变器结构的共模电压抑制进行比较。
分析NZPWM的几种策略,我们发现调制策略中替代了零矢量的作用,也就意味着原本零矢量作用时间产生幅值为udc/2的共模电压变成了由非零矢量作用产生幅值为udc/6的共模电压,在一定程度上降低了共模电压。
3 无零矢量的逆变器结构
通过对NZPWM的分析,由于零矢量的作用对电机的共模电压影响较大,本文想到采用一种逆变器的拓扑结构,在不改变SVPWM调制策略的前提下,使得当调制策略处于零矢量时断开直流母线,此时的输出相电压为0,因此在原有零矢量作用的时间段使得共模电压变成0,如图4给出了这种结构的原理图。
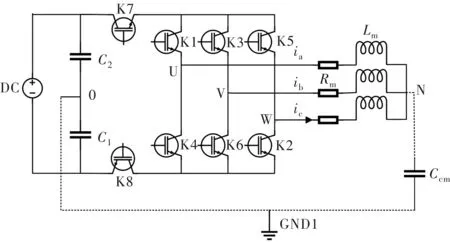
图4 无零矢量作用的逆变器结构
具体的含义是当开关K1、K3、K5处于断开状态时即(0 0 0)开关状态,此时K4、K6、K2处于开通状态,三相的相电压的通路是流过K8的,在此时断开K8,阻断其流通,处于其他矢量作用时K8一直处于开通状态。便使得此时的三相相电压为0,便消除了零矢量作用时的共模电压,当开关状态处于(1 1 1)时,同理。在其它的开关状态时,所产生的共模电压不变,因此共模电压的幅值在 ±udc/6和0之间变换。
4 仿真分析
本文通过搭建的三相PMSM矢量控制仿真模型来研究AZSPWM1,和改变逆变器拓扑这两种方法对共模电压的抑制情况,并且与SVM调制策略的输出特性进行比较。在Matlab/Simulink中搭建的三相PMSM矢量控制的电机参数设置如表2所示,仿真的条件设置如表3所示。
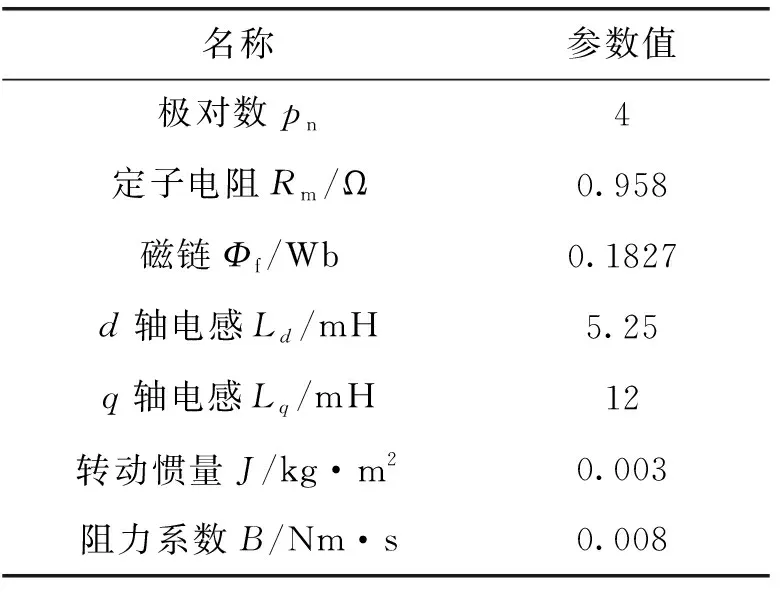
表2 电机参数
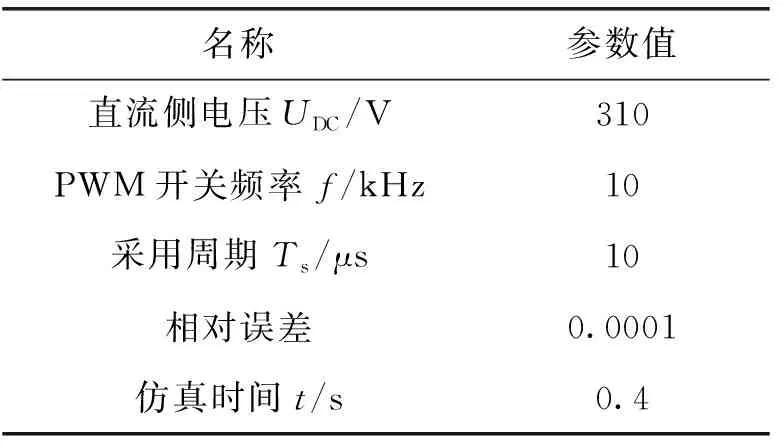
表3 仿真条件
电机空载起动,在0.2 s施加转矩TL=0.4 Nm负载。
SVM、AZSPWM1和改变逆变器结构三种方式在三相PMSM矢量控制系统输出的共模电压波形如图5所示。
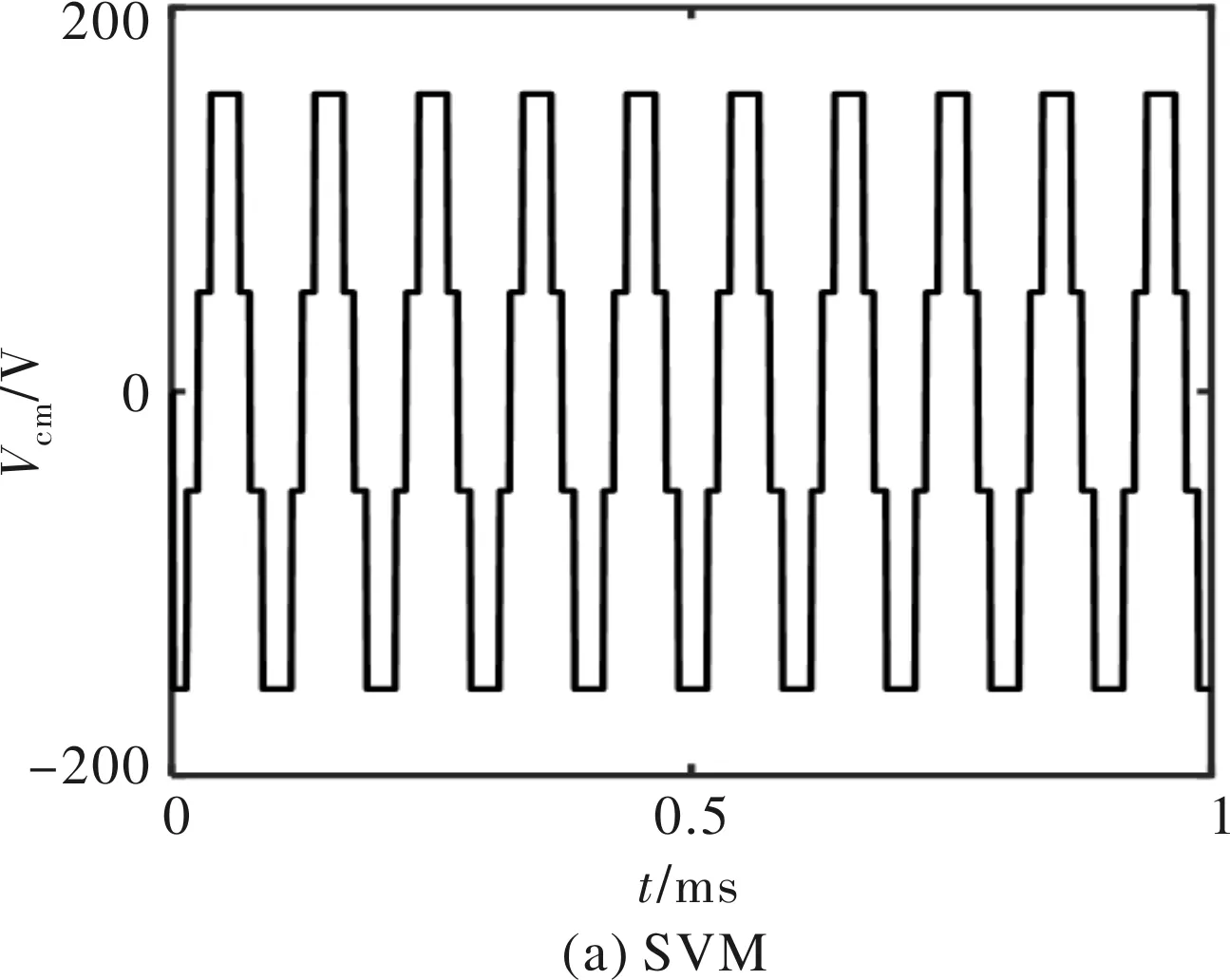
图5 共模电压波形
图5(a)中输出的共模电压具有155 V(udc/2)和51.7(udc/6)两种幅值水平。图5(b)中只有51.7这一种幅值水平,即原来的udc/2变成了udc/6,与理论分析分析一致,说明这种调制策略对共模电压的抑制是有效的。同时图5(c)中只有51.7和0两种幅值特性,即原来的udc/2变成了0,与理论分析是一致的,说明在抑制共模电压幅值上比无零矢量调制策略更加有效。
如图6和图7所示是SVM,AZSPWM1和改变逆变器拓扑结构这几种方式对于本驱动系统所输出的线电压和对应的FFT分析。
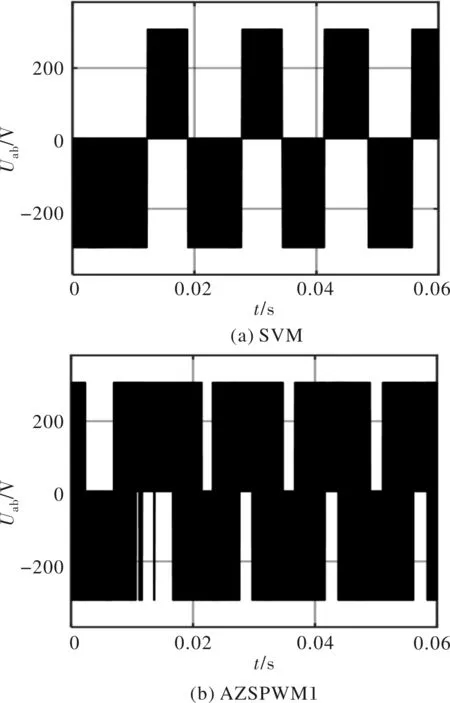
图6 输出线电压uab
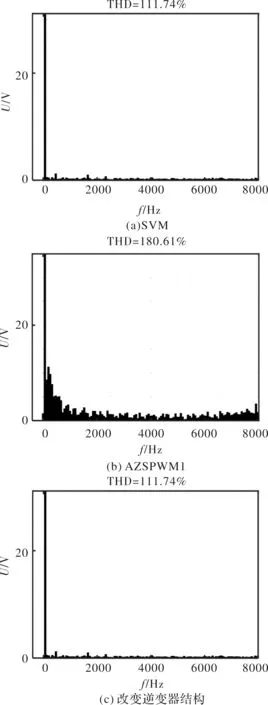
图7 输出线电压FFT分析
根据线电压FFT的分析结果来看,三种调制策略的THD(总谐波失真率)分别是111.74%、180.61%、111.74%,可以发现改变逆变器拓扑结构抑制共模电压的方式并未改变总谐波失真率(THD),而AZSPWM1这种方式的THD增加了,增大了流通电路中的差模干扰。从线电压的角度来看,采用改变逆变器拓扑结构这种方式抑制共模电压更有利。
通过图8、图9和图10比较了这几种策略的定子电流,电磁转矩和转子速度。比较图8(a)和图8(b),可以发现AZSPWM1这种方式的三相定子电流出现了较大的波动,同时三相电流不对称,这就使得在电机中有较大的差模电流流动,影响电机的性能,以至于出现了图9(b)的电磁转矩的波动。同时我们可以通过图8~图10,可以看出改变逆变器拓扑结构的这种方式,它的电机输出性能和SVM调制时的输出性能基本一致。

图8 定子电子波形
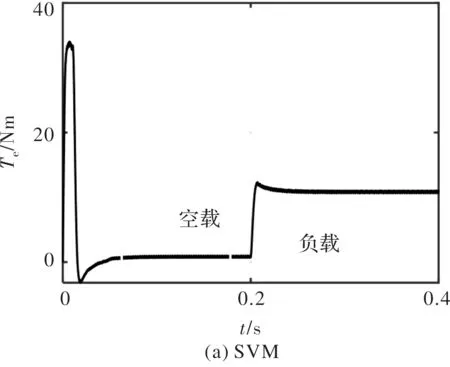
图9 电磁转矩波形

图10 转子速度波形
5 结 论
为了抑制三相永磁同步电机的共模电压幅值,研究了NZPWM和一种改变逆变器结构的方式,并进行了仿真实验验证,主要结论如下:
(1)与SVM相比,NZPWM和改变逆变器结构的方式都对共模电压进行了抑制,NZPWM将共模电压幅值由udc/2减少到了udc/6,而改变逆变器结构的方式将共模电压的幅值由udc/2减少到了0。
(2)对比电机的线电压、相电流、转矩、转速等输出性能,我们发现相对于SVM,NZPWM发生比较大的波动,而改变逆变器结构的方式依然保持良好的输出性能。所以在无零矢量作用时改变逆变器结构的这种方式优于调制控制策略的方式。
(3)对于共模电压的抑制,本文只研究了减少最大共模电压的方式,并未对幅值为udc/6的共模电压进行抑制,后续将对共模电压的全面抑制进行研究。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
防爆电机(2022年3期)2022-06-17
电源学报(2022年1期)2022-02-25
汽车电器(2021年12期)2021-12-30
防爆电机(2021年2期)2021-06-09
地震研究(2021年1期)2021-04-13
安徽科技(2021年3期)2021-04-06
电子制作(2019年23期)2019-02-23
电机与控制学报(2018年9期)2018-05-14
中国新技术新产品(2018年22期)2018-01-05
