基于电磁循迹的直立车设计
2022-08-17 09:17熊中华
电子制作 2022年14期
熊中华
(山东理工大学 交通与车辆工程学院,山东淄博,255000)
随着汽车行业飞速发展,智能网联汽车已成为汽车产业的重要发展趋势。本文基于全国智能车竞赛,采用电磁循迹,快速通过多种复杂路况。
相较于摄像头循迹、光电循迹,电磁循迹不易受到光线、温度等环境因素的影响,适应能力更强。
1 总体方案设计
赛道中心线位置处通有100mA 交变电流的导线所产生的电磁场,用于电磁循迹。采用直立车模(D 车模),以MK60FX512VLQI5 单片机作为主控单元,在IAR 软件上进行调试。以10mH 工字电感为主体提前采集赛道信息,进行归一化,均值滤波,通过编码器检测电机转速,利用PID算法根据路况变化控制电机转速,完成速度的闭环控制。通过姿态传感器获得直立车倾角、角速度,通过PID 算法进而控制直立环、速度环、转向环。直立车D 车模如图1 所示。
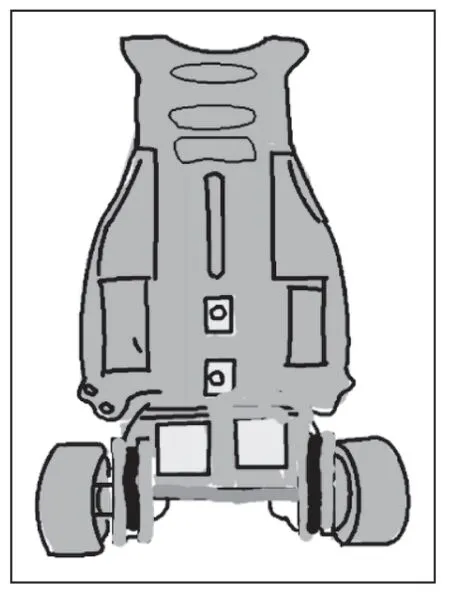
图1 直立车D 型车模示意图
2 机械系统
■2.1 主要模块
(1)传感器模块
电磁传感器:10mH 工字电感[2],搭配6.8nF 校正电容,且电感、电容应该彼此靠近。
姿态传感器:陀螺仪、加速度计。陀螺仪测量车模角速度,其输出模拟电压与直立车前倾或后仰的角速度成正比。加速度计测量车模倾角,其输出模拟电压与直立车倾角成正比。注意,两个传感器的输出的模拟电压值都是正值,可以使用龙邱的ICM20602 加速度计陀螺仪模块,这个硬件模块是由加速度计和陀螺仪两个模块合并为一个模块,陀螺仪测量直立车角速度,加速度计可以用于去除陀螺仪温漂现象。
速度传感器:512 线mini 编码器,用于实时测量电机转速,便于使用PID 算法闭环控制车速。
(2)电源模块:选用7.2V 2000mAh Ni-cd 供电,电源模块包括多个稳压电路,将电池电压转换成各个模块正常工作所需电压,防止干扰,保证工作稳定性,K60 核心板所需电压为3.3V,驱动电路所需电压为12V,电感模块所需电压为5V,编码器、陀螺仪、OLED 屏所需电压为5V。
(3)驱动电机模块:使用电机 RS-380,结合PID 算法,通过改变驱动电压,控制电机转速、转向。通过电机差速控制,实现转向环。通过电机速度控制、加速度控制,实现直立环。利用 MOS 管驱动芯片来驱动H 桥驱动电路,电机驱动电路如图2 所示。
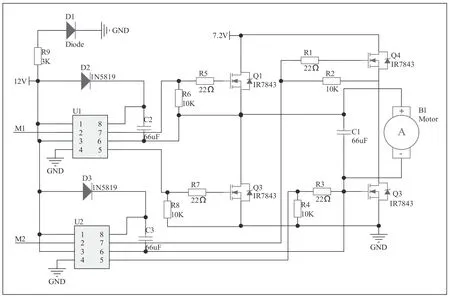
图2 电机驱动电路
(4)控制器模块:使用MK60FX512VLQI5 单片机,接受各传感器采集的信息,判断小车姿态、路况变化、车速,及时数据处理,执行算法,进而驱动电机。
(5)液晶显示模块:为便于调试,安装OLED 液晶显示,可以直观显示出各传感器值,进而观察当前小车状态与程序中各参数之间的关系。系统结构图如图3 所示。
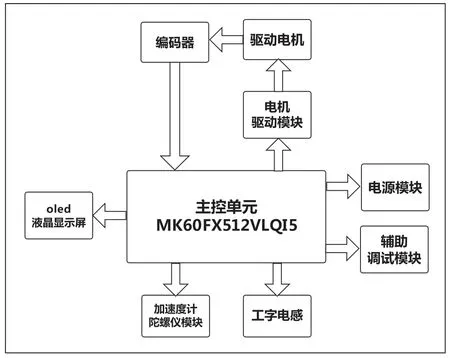
图3 系统结构图
■2.2 直立车结构搭建
搭建原则:质量集中、重心低、质量轻、车轴对称。
(1)找机械零位、降低重心
为使直立车可以有更高速地通过复杂赛道,首先得找到直立车的“机械零位”,即合理安放核心板、运算放大器、电池、碳素支架、电机、OLED 显示屏、陀螺仪等模块,使直立车在静止状态下,不依靠外力尽可能达到直立平衡。
若未找到完美的“机械零位”,可以在直立车运行时,通过电机正反调节,车前倾,电机正转;车后倾,电机反转。
在保证“机械零位”的基础上,应同时保证小车重心低,便于后期小车整体提速,当小车转弯或者速度过快时,容易发生“抬轮”、侧翻等现象,重心低,便于小车稳定。但重心不能过低,若重心过低,容易与车道相碰,造成过坡道困难。
(2)编码器安装
为精确获得电机转速,两轮合理安放编码器,调节编码器、电机齿轮、车轴齿轮三者齿轮间隙,避免间隙不当,造成打齿磨损,传动阻力过大,产生噪声;注意电机带动后轮空转声音,若声音刺耳,则齿轮配合间隙过大,若声音迟滞、沉闷,则齿轮间隙过小,若传动部件转动,轻松、流畅,无噪声,则齿轮间隙良好。
先使用十字扳手套筒拆卸两后轮,裸露出电机齿轮、车轴齿轮、编码器安装孔,通过调节编码器在编码器安装孔的位置,保证两齿轮轴平行,调整齿轮间隙。注意先安装编码器,再安放自制电路板、电池等模块。
(3)轮胎保养
轮胎适当涂软化剂,并经常擦,保证轮胎的适当软度,提高摩擦力,有利于提高车速。
(4)电磁传感器安装
使用空心碳素杆支架作前瞻,采用热熔胶固定,为防止结构不稳定,影响测量电感值,采用一根斜撑杆支撑固定安放工字电感的水平主杆。
采用三水平电感方案,利用对称水平电感的感应电动势量差和比值来解算车体相对于导线偏离的距离,极大降低代码复杂程度。三水平电感方案如图4 所示。
图4 三水平电感方案
(5)姿态传感器安装
将陀螺仪安放在车模后方底部,减少对于倾角测量的干扰,且水平安装,避免影响过弯速度。
(6)自制电路板安装
自制电路板应尽可能小,减轻整车质量,便于合理安装各机械元件,提高速度。且应关于车轴对称放置,贴近车模的底盘,可以将电路板固定在两个电机上,降低整车重心,使直立车运行更平稳。
(7)电池安装
使用铝片材质的电池支架安装在直立车后方,并使用将电池固定在电池支架上,且关于车轴对称,便于随时取放充电,同时,有效降低了直立车重心,行驶更平稳。
3 软件设计与调试
■3.1 电感值采集及处理
工作原理是MK60FX512VLQI5 单片机通过 AD 口采集电感检测得电磁信号变化量,为消除电流变化对电感值的影响,电感值归一化,通过以下公式归一化:

式中:max为电感最大值,min为电感最小值。x为归一化前的值,y为归一化后的值。
传感器数值采用均值滤波,连续采集5 次,求均值,去除噪点,得到较准确的电感值;通过姿态传感器获得直立车倾角和角速度,用于直立环、速度环、转向环控制。使用mini512 编码器采集两电机实时转速,结合直立倾角、角速度,应用PID 控制理论算法,将直立控制输出Ang_control、速度控制输出Speed_control、转向控制输出Dir_control三者进行线性叠加,进行电机转速、转向的闭环控制。
■3.2 PID 简介
PID[3]的全称为比例积分微分控制,P 即为比例,I 即为积分,D 即为微分。
Kp的作用是加快系统的响应速度,Kp太大,容易使小车震荡、不稳定,影响电感采集值,造成路况误判;
Ki用于消除系统的稳态误差,Ki太小,加速反应慢,稳态误差难消除;Ki太大,容易超调,小车震荡;
Kd改善系统的动态性能,对偏差变化提前预报,Kd太大,会让小车抖动、迟钝,来不及对赛道元素突变作出反应。
■3.3 直立环
搭车时,找到合适的机械零位,当小车处于机械零位时,电机不转,保持直立状态,但一旦小车运动时,容易偏离机械零位,须通过电机正反转保持直立。
通过加速度计陀螺仪模块检测车模倾角、角速度变化,判断是否偏离机械零位。若车前倾,电机正转;车后倾,电机反转,来维持直立车平衡。
姿态传感器包括陀螺仪和加速度计,分数字式、模拟式。我们采用模拟式,模拟式直接用AD 采集。相较于数字式,读取速度更快,但容易受温度影响,产生累计误差,累计误差可以使用加速度计[1]校核。
使用ICM20602 六轴加速度计陀螺仪模块采集所需轴的数据,进行加速度计姿态解算,获得直立车倾角值,但该方法容易受到直立车抖动、温度等影响,与实际倾角产生较大偏差,不能直接用于直立环控制。陀螺仪可以测量车模倾斜角速度,对角速度进行积分可得到车模倾角,这种方式不易受到车模运动的影响,但存在角速度偏差,积分运算易产生累计误差,与直立车实际倾角产生偏差,不利于直立环算法的构建。考虑到两种方法都可得到直立车倾角,陀螺仪角速度积分方法误差更小,且加速度静态响应好,陀螺仪动态响应好,选择使用加速度计获得的倾角值来校核陀螺仪角速度积分得到的倾角值,两者融合解算出一个更准确的倾角值,加速度计陀螺仪得到的角度通过互补滤波[5]进一步得到角度Ang_ronghe,然后,选择PID 中的PD 控制,即用Ang_ronghe乘以比例项系数Kp_ang;再用陀螺仪采集到的值与陀螺仪的偏移量相减,再乘以一个比例系数,得到角速度Ang_dot,乘以微分项系数Kd_ang;将两值相加得到的PWM值作为直立控制输出Ang_control。直立控制公式如下:

式中:Ang_control为直立控制输出,Ang_ronghe为加速度计陀螺仪的角度通过互补滤波后的角度,Kp_ang为比例项系数,Ang_dot为归一化后的角速度,Kd_ang为微分项系数。
■3.4 转向环
转向环是利用电感获取的差比和偏差进行PD 控制输出PWM 波,控制左右电机产生速度差,驱动车模转向消除车模距离赛道中线的偏差,需要比例控制,快速响应直立车转向,因直立车安装有电池等重物,为防止“转向过冲”现象,加入微分控制。要想进一步提速,可以建立多组车速与给定Kp、Kd之间的函数关系式。
通过三水平工字电感采集到的数据计算出直立车当前位置Dir_value,预设的理想中线值为Mid_line,两者作差为方向偏差Err_direct,即是此时直立车偏离赛道中线的距离,再乘以比例项系数Kp_direct;再用陀螺仪采集到的值与陀螺仪的偏移量相减,进行归一化,得到角速度Ang_dot,乘以微分项系数Kd_direct;将两值相加得到的PWM 值作为转向控制输出Dir_control。转向控制公式如下:

式中:Dir_control为转向控制输出,Err_direct为此时直立车偏离赛道中线的距离,Kp_direct为比例项系数,Ang_dot为归一化后的角速度,Kd_direct为微分项系数。
■3.5 速度环
保证速度环控制的前提是直立环控制,为实现直道加速,弯道减速或者恒定速度通过,我们期望理想速度是一个恒定值,如果直立车运行速度忽快忽慢,会造成车模前后倾斜,进而影响工字电感采集电感值,进而影响元素判断甚至决策误判,故我们希望速度环的理想速度为一恒定值。
速度环就是利用min512 编码器及时反馈两车轮瞬时速度,使用PI 调节,进行闭环控制[4],实现实际电机转速快速达到理想速度。
直立车理想速度Vi与电机实际转速Vr差值为速度偏差Err_speed。为使速度变化快速响应,乘以一个比例项系数Kp_speed;引入积分环节可以消除偏差,减小稳态误差,累积偏差Ingra_speed乘以一个积分项系数Ki_speed;将两值相加得到的PWM 值作为速度控制输出Speed_control。速度控制公式如下:

式中:Speed_control为速度控制输出,Err_speed为直立车理想速度Vi与电机实际转速Vr差值,Kp_speed为比例项系数,Ingra_speed为速度偏差累积值,Ki_speed为积分项系数。
■3.6 PID 调试方法
对于速度要求不高的情况下,直立环最关键;
对于追求高速完成比赛,转向环是核心。对于直立环,要注重利用示波器融合出合适的互补滤波;对于速度环的PI 调节,要注重结合直立环的PD 调节情况,直立环不能太“硬”,即PD 值较大,也不能太“软”,即PD 值太小,可以稍硬一些,便于其他环的调试,若直立环太硬,不利于调试速度环和转向环;若直立环太软,则响应速度变慢,会影响到直立车的行驶速度,甚至会产生较大摆动;速度环调节需要找到一组合适的PI 可以同时适应高速和低速。
先调Kp,令Ki、Kd 为0,在赛道上调到正常车速后,观察记录相应数值及现象。然后调节Ki,最后调节Kd。当小车可以很好地运行时,可以在电池、环境变化等多种情况下,同时微调Kp、Ki、Kd 中任意多个参数值,多次跑车,记录比较理想的Kp、Ki、Kd 值。
根据调试经验,可以将Kp 参数调大点,可以更好地根据路况变化速度快速调节。将Ki 调小些,可以将Kp 参考值设为0.7,Ki 参考值为设0.03,Kd 参数设为0.3,再多次根据实际路况,改进算法,多次调试,取得理想数值。
4 结语
本文从总体方案设计、机械系统设计、软件设计与调试三方面详细介绍了基于电磁循迹的直立车设计,经调试验证,方案可行。
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
中学课程辅导·教师通讯(2018年10期)2018-09-04
智能计算机与应用(2018年2期)2018-05-23
经营者·汽车商业评论(2016年5期)2017-11-30
中学生数理化·高一版(2017年3期)2017-07-08
科技视界(2016年20期)2016-09-29
计算技术与自动化(2014年1期)2014-12-12
现代营销·经营版(2013年10期)2013-05-14
吉林农业·下半月(2009年1期)2009-02-07
旅伴(2006年9期)2006-09-21