
基于CMAES算法的加速度计多位置新型标定方法
2018-05-23 11:46仲志丹张玮琪杜慧颖
智能计算机与应用 2018年2期
仲志丹 张玮琪 杜慧颖
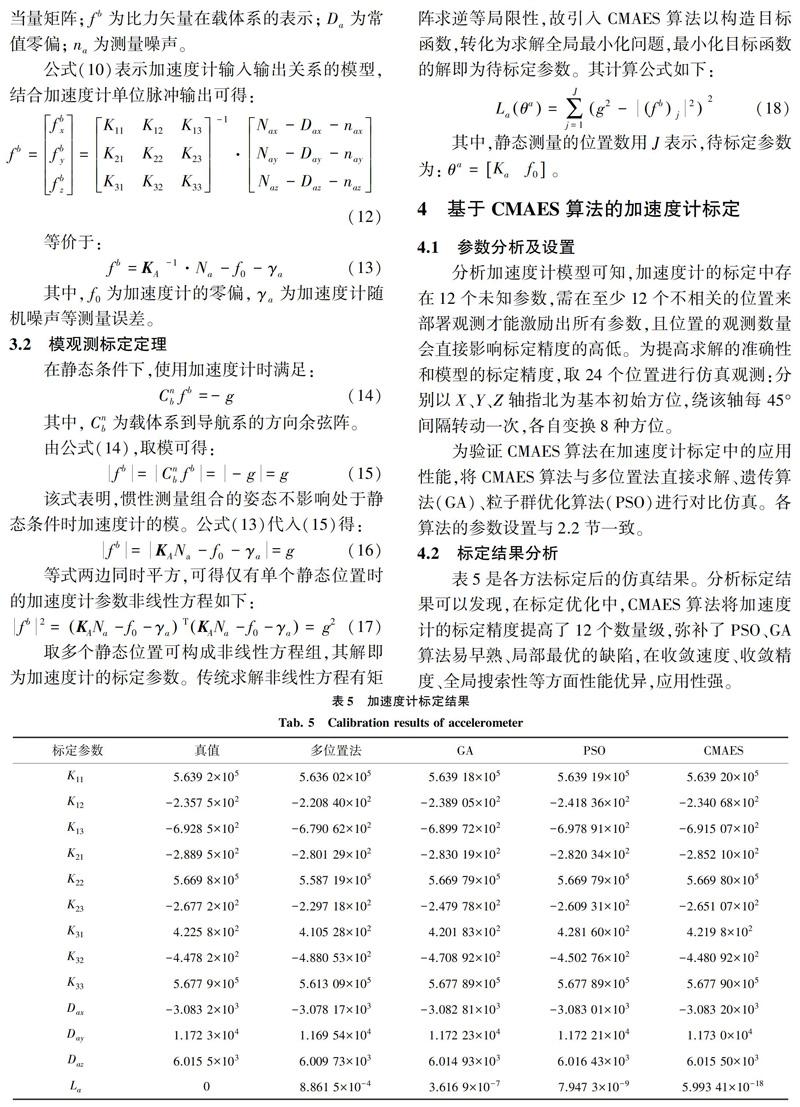


摘 要: 针对粒子群优化算法(PSO)和遗传算法(GA)在加速度计标定优化后期出现早熟、 陷入局部最优,以及在设计与应用过程中存在的缺陷,将自适应协方差矩阵进化策略(CMAES)算法应用于加速度计的快速标定:采用具有不同函数特征的Sphere、Rastrigin和Rosen 三个基准函数对比测试CMAES算法的总体性能;以模观测标定方法为基础建立加速度计标定模型,选取加速度计的24个位置进行仿真观测。实验结果表明: CMAES算法在收敛速度、收敛精度、全局搜索等方面性能优异,将加速度计的标定精度提升了12个数量级,为其它算法标定加速度计奠定了良好基础,对位移系统测量研究具有重要意义。
关键词: 自适应协方差矩阵进化策略;加速度计标定优化;标定;多位置;遗传算法
Abstract:In view of premature insufficiency being trapped in a local optimum of accelerometer calibration optimization and defects in application by particle swarm optimization(PSO) and genetic algorithm (GA) algorithm the paper proposes the research applying Covariance Matrix Adaptation Evolution Strategy (CMAES) into accelerometer calibration. Firstly Sphere Rastrigin and Rosen test functions are used to testing the overall performance of CMAES algorithm which has different functional characteristics. Then accelerometer model is established based on observation model calibration method. Lastly 24 positions of accelerometers are selected for simulation observation. Final calibration simulation results show that the proposed algorithm has an advantage on convergence speed and accuracy. Besides the calibration accuracy of the proposed method is increased up to 12 order of magnitudes. This new method lays a good foundation for other algorithms to calibrate accelerometers and also is of great significance to displacement system measurement research.
Key words: Covariance Matrix Adaptation Evolution Strategy;calibration optimization of accelerometer;calibration;multi-position;genetic algorithm
引言
加速度计是惯性导航、惯性测量系统以及控制领域的重要测量器件。通过实验事先确定加速度计相对应的转换模型中的各项参数就是加速度计的标定 [1]。标定与补偿是使用加速度计前必不可少的环节,且是设计、改进传感器的关键性理论依据[2]。
传统标定法通过精准地控制机械转台的方位和转速进行标定,成本较高[3]。GLUECK等提出MEMS惯性传感器标定方法的成本和精度均优于传统方法,但在标定、处理方面仍显不足[4]。荷兰学者L-tters提出基于模观测的加速度计标定方法[5],将标定加速度计转换为优化求解非线性方程组。接下来,又针对传统方法求解非线性方程时矩阵求逆等局限性问题,有学者尝试将遗传算法(Genetic Algorithm,简称GA),粒子群优化算法(Particle Swarm Optimization,简称PSO)等运用在加速度计标定研究中[6],但明显存在弊端。随着研究的不断发展,Hansen等人还重点研发了以进化策略(Evolution Strategy,简称ES)为基础、具备良好寻优性能的自适应协方差矩阵进化策略[7](Covariance Matrix Adaptation Evolution Strategy,简称CMAES),且在各优化领域备受时下学界的高度关注[8-10]。
为解析证得CMAES算法的有效性与优越性,对3个具有不同函数特征的基准测试函数分别用GA、PSO和CMAES算法進行仿真对比;以模观测标定法为基础建立加速度计标定模型,列出待定参数为未知的非线性方程组;根据标定模型选取加速度计的24个位置开展仿真观测;首次运用收敛性能优异且不依赖种群大小的CMAES算法标定加速度计参数,并与单独使用多位置法、GA、PSO标定加速度计来提供最终实验对比。结果表明,该新型方法能够满足标定精度的需求,可用于实践中。
1 CMAES算法
自适应协方差矩阵进化策略(CMAES)采用多维正态分布N(m,c)的矩阵[WT5HX]C[WT5BX]直接描述群体突变分布,依据当前代最优子群与前一代群体均值m之间的关系更新矩阵、调整群体突变方向[11],可在适应种群规模变化的同时,大幅提高进化策略的收敛速度以及演化过程的效率[12]。算法流程如图1所示。
猜你喜欢
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
智富时代(2018年7期)2018-09-03
智富时代(2018年4期)2018-07-10
智富时代(2018年4期)2018-07-10
大陆桥视野·下(2017年12期)2017-11-29
读与写·教育教学版(2017年10期)2017-11-10
