
地铁永磁牵引系统复矢量电流环稳定性研究*
2022-08-06 08:37沐俊文葛兴来
电气工程学报 2022年2期
沐俊文 葛兴来 朱 丹
(1. 西南交通大学电气工程学院 成都 611756; 2. 中车大连机车车辆有限公司 大连 116022)
1 引言
随着内置式永磁同步电机(Interior permanent magnet synchronous motor,IPMSM)驱动技术的发展,IPMSM因其功率密度高、电流响应快、转矩脉动低等优点被轨道交通等领域广泛使用。但IPMSM具有非线性、强耦合的特点,dq轴系下的IPMSM数学模型,含有交叉耦合项,且随着电机转速的升高,耦合影响加剧,严重影响了控制性能[1-2],为消除交叉耦合项的影响,可用复矢量的分析方法对IPMSM及电流控制环进行建模,并利用零极点对消原理设计复矢量电流调节器,通过引入随速度变化的复零点抵消电机模型中的复极点耦合项,实现了对定子电流励磁分量和转矩分量的有效解耦,从根本上改善了电流环的耦合特点[3-4]。
对于地铁永磁牵引系统,其具有以下特点:① 牵引变流器功率大、开关频率低、电压利用率高、脉宽调制(Pulse width modulation, PWM)技术特殊;② 牵引电机运行工况复杂、变频范围宽、电机参数多变、转矩控制难度大;③ 牵引电传动系统在复杂、恶劣的线路运行条件下稳定性要求高。为降低开关损耗,保证散热,提升逆变器效率,开关频率往往限制在1 kHz以内。研究指出随着开关频率的降低会使延时效应加剧,在电流环控制回路中引入相位滞后,进一步加剧耦合效应的影响,恶化电流环的解耦性能,从而降低系统的控制性能,甚至破坏系统稳定性[5-6]。为解决这一问题,文献[7-8]在同步旋转坐标系下,建立了永磁同步电机及其电流控制环的闭环传递函数,利用根轨迹法分析了数字控制延时对稳定性的影响,并引入了角度补偿消除了数字控制延迟的影响。文献[9-10]注意到离散控制器处理数字控制延时的优势,在离散域下建立了永磁同步电机的数学模型,并设计了复矢量PI电流调节器,分析了信号采样延迟和PWM发波延迟的影响,实现了在高速条件下的d轴和q轴电流分量的解耦控制,改善了运行在低载波比条件下IPMSM的控制性能。
然而,上述研究中未考虑到在地铁永磁牵引系统的应用背景下,载波比低以及变速带载的复杂工况,因此,本文将探究其对IPMSM复矢量电流调节器稳定性的影响并给出稳定性边界条件。据此,本文在第2节中首先推导了基于复矢量电流控制器的IPMSM电流环闭环传递函数,其次在第3节中,依据电流环闭环传递函数分析了数字延时对控制系统稳定性的影响,并给出了稳定边界条件。然后在第4节中,线性化永磁同步电机机械运动方程,推导了系统闭环传递函数,绘制其零极点分布图,并分析了不同工况下的稳定边界条件。最后在第5节中,测试验证了所推导的稳定边界条件的准确性。
2 电流环-IPMSM建模分析
2.1 IPMSM复矢量控制数学模型
考虑到IPMSM在dq轴下定子电压方程不对称的特点,采用磁链方程

为保证矩阵的对称性,忽略电阻压降和ωeφf项,得到IPMSM模型,其复矢量形式表示为[11-12]

式中,u′dq=ud+juq,idq=id+jiq,ud为定子电压的d轴分量;uq为定子电压的q轴分量;id为定子电流的d轴分量;iq为定子电流的q轴分量;ωe为电机的电角速度;Ldq为定子电感;φf为永磁体磁链。
由式(2)可知,IPMSM近似为感性负载,且随着ωe的上升,dq轴耦合加剧,进而影响电流环控制性能,甚至破坏控制系统稳定性。
为保证电流环良好的解耦效果,采用零极点对消原理,复矢量电流调节器传递函数为

式中,Kp为控制器系数。最后在控制器输出补偿电阻压降和ωeφf项便可以得到实际的控制输出。
在数字控制系统中,存在由模数转换、数字处理器计算和PWM发生器[13]而产生的时间延迟。对于对称规则调制,从采样时刻到更新时刻[14]持续1个载波周期Ts,零阶保持效应使更新后的占空比保持不变,近似于一半Ts[15],因此总的延迟可近似为1.5Ts[16]。由数字控制引起的控制延时和采样延时可表示为

式中,Td为逆变器的开关周期。
在低载波比情况下,电机控制中坐标变换时所采用的电角度经过采样、计算延迟已经与真实电角度存在角度滞后,再经过SVPWM生成电压矢量作用到控制器时,此时dq轴已旋转角度θd,即采样时dq轴与电压矢量实际作用时dq轴之间的夹角为数字控制延时导致的角度延迟。对于矢量控制由于控制延时而在坐标变换中引入的角度延迟,可表示为

式中,θd=ωeTd,为延迟角度。其受到电机的电角速度和逆变器开关周期的影响,如图1所示,随着ωe和Td的增大,延迟角度增大。
以两相静止坐标系和两相旋转坐标系变换为例,由于延迟角度的影响,可表示为

由式(6)可知,随着低开关频率引起的角度延迟的增大,导致dq轴耦合加剧,进一步影响电流环控制性能。

图1 ωe和Td对延迟角度的影响
综上,IPMSM复矢量电流调节器控制框图如图2所示。
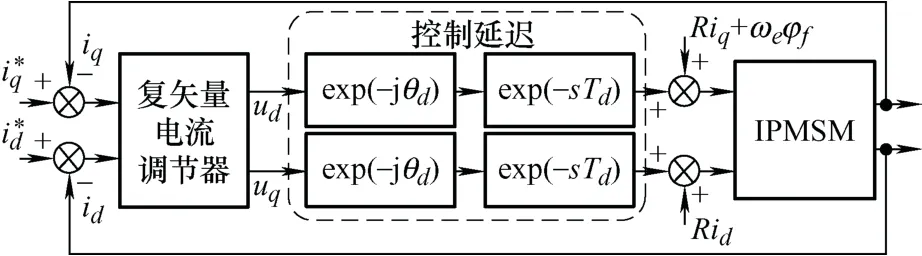
图2 IPMSM复矢量控制框图
2.2 动态解耦性能分析
如基于复矢量的电流环控制框图所示,在不考虑控制延时的情况下,由式(2)、(3)得到,系统闭环传递函数为

由式(6)可知,由于在电流控制器的传递函数中引入了与IPMSM交叉耦合项相同的复零点,与电机模型中的复极点对消,使系统闭环传递函数中不再含有耦合项,并化简为一阶惯性环节,其带宽由控制器参数Kp决定。通常为保证控制器性能,选择Kp≤0.1/Td[17]。
为直观展现零极点的变化规律,根据式(7)以及表1所示的电机参数,给定Kp=10,画出电角速度ωe由0 rad/s上升至754 rad/s时,系统闭环传递函数零极点随转速变化的零极点图,如图3所示,图中“×”表示极点,“○”表示零点。

表1 IPMSM参数
由图3可以看出,位于虚轴上的电机模型复极点与电流控制器复零点(0,-ωe),随转速变化仍能一一对消,主导极点为(-Kp,0),即控制系统性能由Kp决定。

图3 Gvp零极点图
3 考虑数字控制延时的稳定性分析
3.1 失稳机理分析
为探究IPMSM控制系统在数字控制延时影响下的失稳机理,分别讨论时间延时和角度延时对系统稳定性的影响。当只考虑时间延时Gt时,由式(4)、(7)得到,系统闭环传递函数为
由式(8)可知,化为标准形式后,系统阻尼比可表示为

自然频率可表示为

综上可知,由于阻尼比恒大于零,系统稳定,同时系统性能可通过调节Kp以实现阻尼比的合理配置。
当只考虑角度延时Gd时,由式(5)、(7)得到,系统闭环传递函数为 可得其闭环极点为


可得,当闭环极点的实部为正时,系统失稳,即当3π/2+2kπ>θd>π/2+2kπ (k=0, 1, 2, 3, …)时,系统失稳。
综上,在假设条件下,分别考虑了时间延迟与角度延迟单独作用下的闭环传递函数稳定性,可知,在完全解耦情况下,控制延迟依然可能致使系统失稳,失稳的根本原因是角度延迟在(π/2+2kπ, 3π/2+2kπ)区间内产生了实部为正的极点。
3.2 稳定性边界条件
然而,在实际控制系统中,控制延迟包括的时间延迟和角度延迟同时存在,因此,进一步分析GtGd共同作用下的影响。此时,系统闭环传递函数可表示为

可得其闭环极点为
由闭环极点可知,s2<0恒成立,可得稳定边界条件为

为直观地说明闭环极点的分布规律,依据表1所示的电机参数,绘制在不同条件下的系统闭环传递函数Gvpdt零极点分布图。
(1) 电角速度ωe对零极点的影响。给定Kp=10,Td=1/1 000不变的条件下,逐渐增大ωe(由200 rad/s增至1 675 rad/s),Gvpdt零极点分布如图4所示。由图4可知,电流环完全解耦后,在数字控制延时的影响下,电流环闭环传递函数存在两个极点分别为s1和s2,且s1距离虚轴更近,为主导极点。随着ωe的增加,θd随之增加,闭环极点s1向右半平面移动,当ωe达到1 570 rad/s左右时,系统失稳,此时,θd约为π/2。
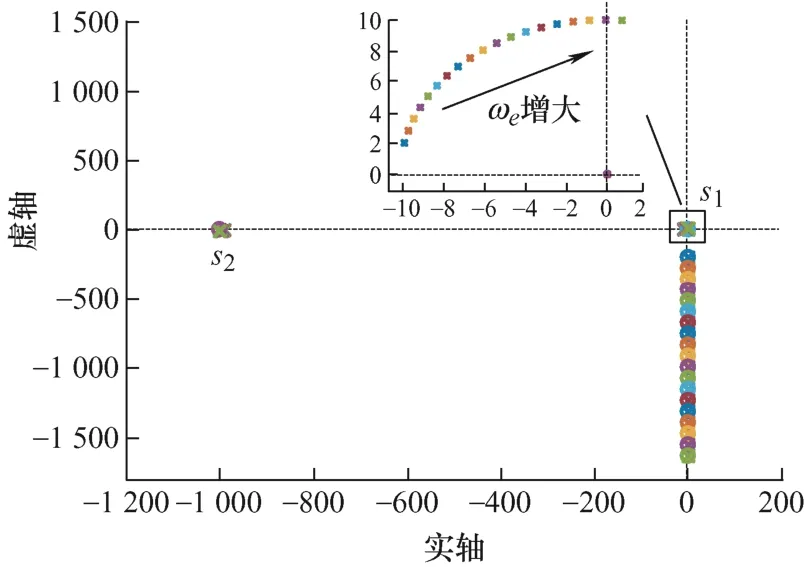
图4 Gvpdt零极点图
(2) 控制带宽Kp对零极点的影响。给定Td=1/1 000,ωe=754 rad/s不变的条件下,逐渐增大Kp(Kp≤0.1/Td),Gvpdt零极点分布如图5所示。由图5可知,随着Kp的增加,主导极点s1向左半平面移动,利于系统稳定。
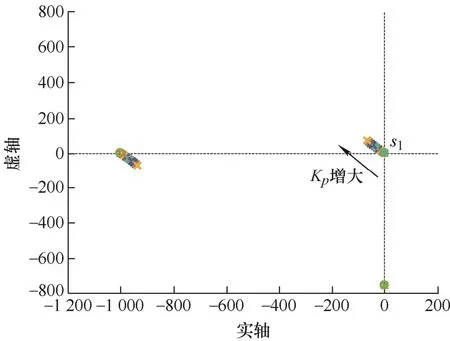
图5 Gvpdt零极点图
(3) 逆变器开关周期Td对零极点的影响。给定Kp=10,ωe=754 rad/s不变的条件下,逐渐增大Td(由0.001 s增至0.002 2 s),Gvpdt零极点分布如图6所示。由图6可知,随着Td的增加,θd同时增大,闭环极点s1、s2均向右半平面移动,但主导极点仍为s1,当Td达到0.002 s左右时,系统失稳,此时θd约为π/2。
综上分析,式(13)所示系统闭环极点无法得到失稳边界条件的准确解析解,结合零极点分布规律可知,在采用复矢量控制电流环完全解耦情况下,角度延迟导致系统失稳的边界条件可近似为

4 不同工况下的稳定性分析
为进一步探究不同工况对IPMSM复矢量电流调节器稳定性的影响,可根据IPMSM数学模型,建立电机负载转矩和电角速度之间的传递函数。首先,根据式(2)改写IPMSM模型,并线性化,可得
式中,下标“0”表示稳态分量;上标“~”表示扰动分量。
IPMSM机械运动方程可表示为
式中,J为转动惯量;pn为IPMSM的极对数。
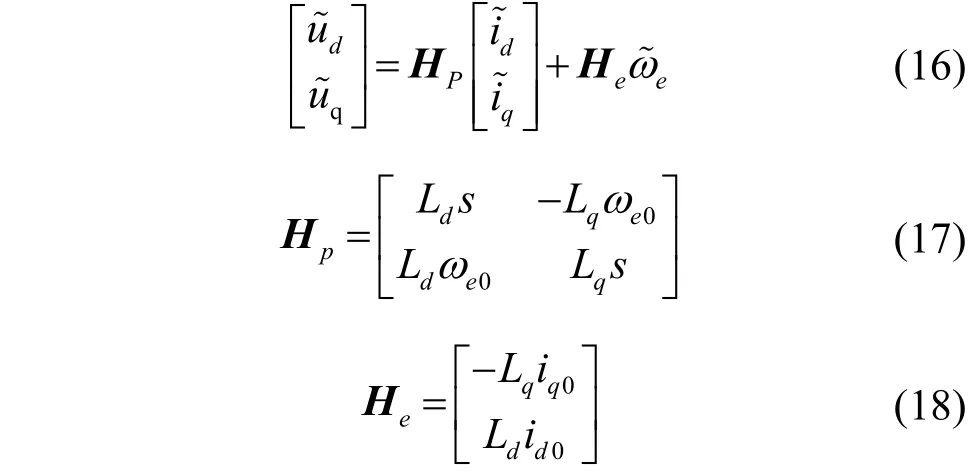
其次,根据式(3)可得复矢量电流调节器矩阵形式,并线性化,表示为

联立式(16)~(22)可得电机负载转矩和电角速度之间的传递函数,表示为

若进一步考虑式(4)、(5)所示延时环节的影响,可将式(23)进一步推导得到

依据表1所示的IPMSM参数,绘制式(23)、(24)所示的闭环传递函数在不同工况下的零极点分布图。
4.1 不同负载对稳定性的影响
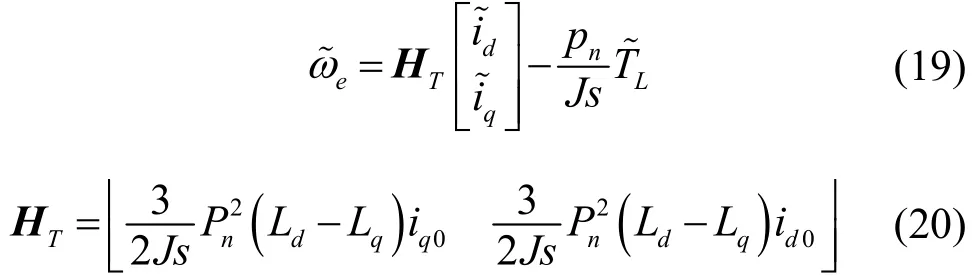
给定Kp=100,ωe=314 rad/s,Td=1/1 000不变的条件下,逐渐增大所带负载(由0 N·m增至900 N·m),稳态时,由于电机电磁转矩Te0与负载转矩TL相等,因此,根据电磁转矩计算公式

可知,随着所带负载的增大,电机稳态运行时dq轴电流随之增大。Gωl和Gωld零极点分布分别如图7、8所示。结合式(23)和图7可知,Gωl存在三个零点分别为(0,jωe)、(0,-jωe)和(-Kp,0),以及(0,0)极点和分别分布在三个零点周围的三个极点,其中分布在(0,jωe)和(0,-jωe)零点周围的两个极点s3和s4距离虚轴距离更近为主导极点,Gωl零极点分布符合基于零极点对消的复矢量电流环控制原理。同理,结合式(24)和图8可知Gωld同样存在(0,0)极点和分布在(0,jωe)和(0,-jωe)零点周围的两个主导极点s5和s6。
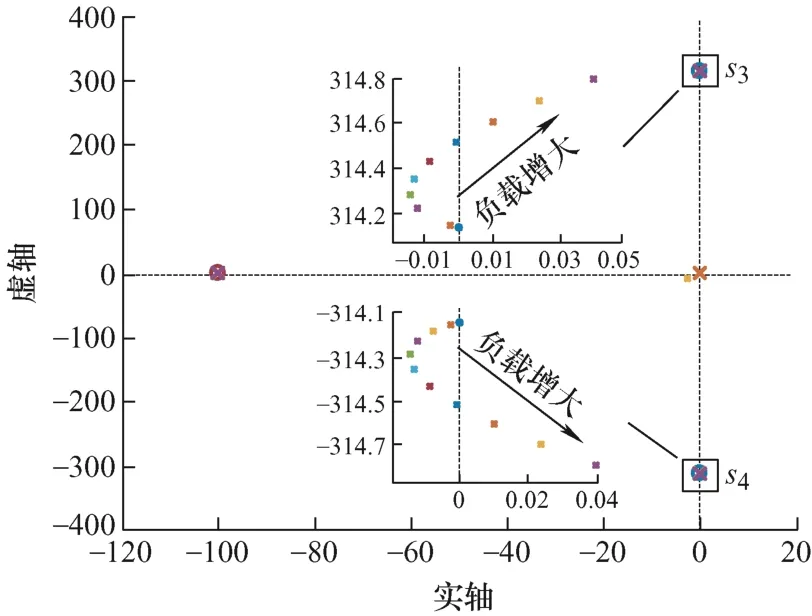
图7 Gωl零极点图
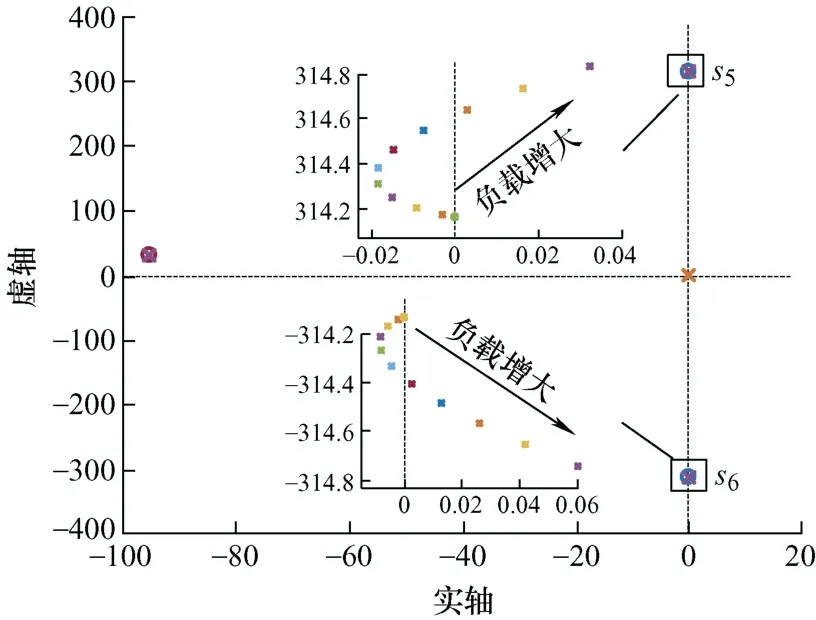
图8 Gωld零极点图
由图7可知,在不考虑延时环节影响的条件下,随着带载的增加,主导极点s3和s4先向左半平面移动再向右半平面移动,当带载达到637 N·m左右时,s3和s4同时越过虚轴,系统失稳。由图8可知,在延时环节的影响下,随着带载的增加,主导极点s5和s6仍先向左半平面移动再向右半平面移动,但由于延时环节的影响,当带载达到510 N·m左右时,s6首先越过虚轴,系统失稳。
从零极点图上看,延时环节的引入使系统极点受到exp(-sTd)的影响向虚轴靠近同时受到exp(-jθd)的影响向正半区域移动进而使失稳边界收缩,系统更易失稳。延时的增加使得生成的控制信号产生了滞后和偏差,稳态运行时,主要由于延迟角而使得坐标变换产生误差,时间延时而使得交流控制信号产生滞后,进而加剧系统耦合,破坏电流环解耦能力,促使系统失稳。据此,在延时环节的影响下,电机带载能力下降,更易失稳。
4.2 电角速度ωe对稳定性的影响
给定Kp=100,Td=1/1 000,带900 N·m恒定负载不变的条件下,逐渐增大电机转速(由ωe=30 rad/s增至ωe=314 rad/s),Gωl和Gωld零极点分布分别如图9、10所示。
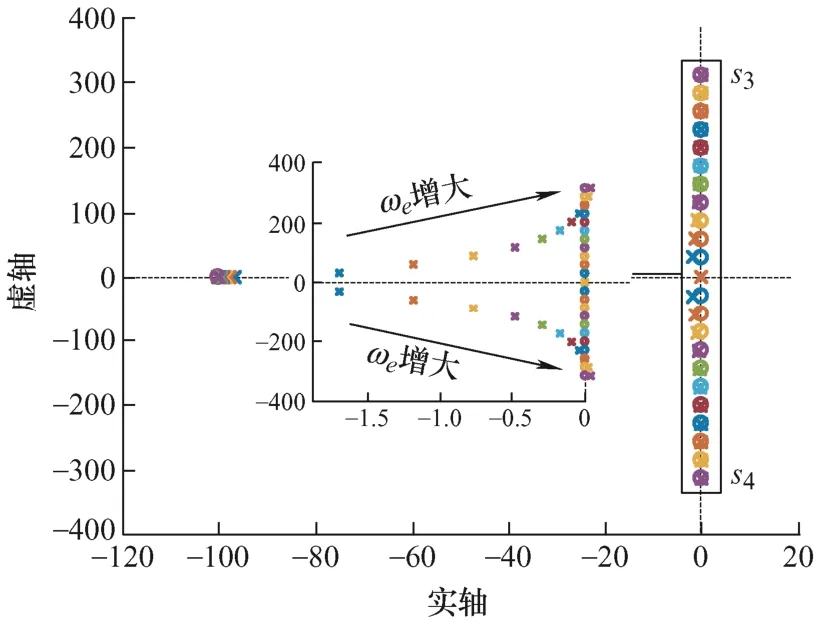
图9 Gωl零极点图
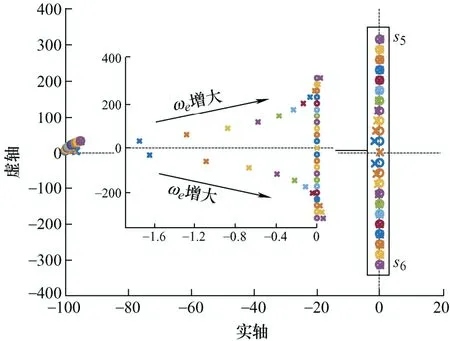
图10 Gωld零极点图
由图9可知,在不考虑延时环节影响的条件下,随着电机转速的增加,主导极点s3和s4沿虚轴逐渐远离实轴并向正半平面移动,当电机转速上升到259 rad/s左右时,s3和s4同时越过虚轴,系统失稳。相反,随着电机转速的降低,主导极点s3和s4逐渐偏离零点(0,jωe)和(0,-jωe),此时零极点难以相消,复矢量电流环难以实现完全解耦。由图10可知,在延时环节的影响下,随着电机转速的增加,主导极点s5和s6仍有相同的运动趋势,但由于延时环节的影响,当电机转速上升到230 rad/s左右时,s6首先越过虚轴,系统失稳。据此,电机带载时复矢量电流环解耦能力恶化。在延时环节的影响下,复矢量电流环解耦能力进一步恶化,电机调速范围更窄,更易失稳。
4.3 控制带宽Kp对稳定性的影响
给定ωe=314 rad/s,Td=1/1 000,带500 N·m恒定负载不变的条件下,逐渐增大控制带宽Kp(Kp≤0.1/Td),Gωl和Gωld零极点分布分别如图11、12所示。
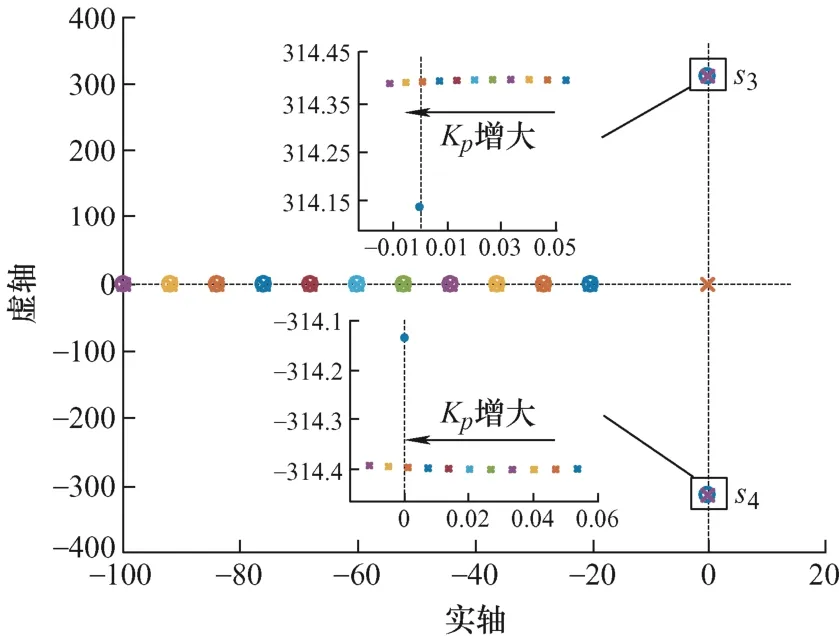
图11 Gωl零极点图

图12 Gωld零极点图
由图11可知,在不考虑延时环节影响的条件下,随着控制带宽的增加,主导极点s3和s4向负半平面移动,当控制带宽增加到85左右时,s3和s4同时越过虚轴,系统稳定。由图12可知,随着控制带宽的增加,主导极点s5和s6虽有相同的运动趋势,但由于延时环节的影响,当控制带宽增加到98左右时,s6才越过虚轴,系统稳定。据此,随着控制带宽的增加,电机带载能力上升。但在延时环节的影响下,抑制了电机带载能力上升。
5 测试验证
为验证第2、3节中所探讨的失稳边界条件的准确性,在如图13所示的硬件在环测试平台上进行测试验证,测试平台由上位机、DSP28335以及实时仿真器组成,其中控制算法下载到TMS320F28335DSP中实现,直流电源、滤波环节、逆变器和IPMSM则由实时仿真器模拟运行实现。电机参数与控制算法与第2~4节中所使用的一致,测试工况均在额定范围内。

图13 硬件在环测试系统框图
5.1 空载工况下稳定性边界条件验证
为测定被测系统的稳定性边界条件,验证所述理论的正确性,首先给定试验参数Kp=10,Td=0.004 s不变的条件下,逐渐增大ωe并观测记录电机运行状态,如图14所示,当被测系统由稳定变为失稳时即可测得稳定的边界条件。据此,从图14中可以看出,随着ωe的增大,电机逐渐失稳振荡,此时ωe在398 rad/s左右,θd约为π/2,与第2节中所分析的 一致。
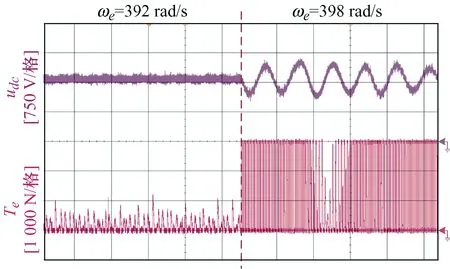
图14 电机响应
同理,给定Kp=10,ωe=398 rad/s不变的条件下,逐渐增大Td并观测记录电机运行状态,如图15所示。从图15中可以看出,随着Td的增大,电机逐渐失稳振荡,此时Td在0.004 s左右,θd约为π/2。

图15 电机响应
5.2 带载工况下稳定性边界条件验证
采用与第5.1节相同的方法,给定Kp=100,ωe=314 rad/s,Td=1/1 000不变的条件下,逐渐增大所带负载并观测记录电机运行状态,如图16所示。从图16中可以看出,随着所带负载的增大,电机逐渐失稳振荡,此时负载在500 N·m左右。
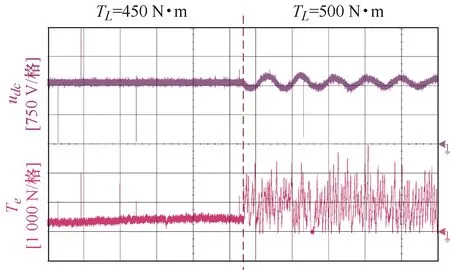
图16 电机响应
给定Kp=100,Td=1/1 000,带900 N·m恒定负载不变的条件下,逐渐增大电机转速并观测记录电机运行状态,如图17所示。从图17中可以看出,随着电机转速的增大,电机逐渐失稳振荡,此时ωe在230 rad/s左右。

图17 电机响应
给定ωe=314 rad/s,Td=1/1 000,带500 N·m恒定负载不变的条件下,逐渐减小控制带宽Kp并观测记录电机运行状态,如图18所示。从图18中可以看出,随着控制带宽的减小,电机逐渐失稳振荡,此时Kp在98左右。
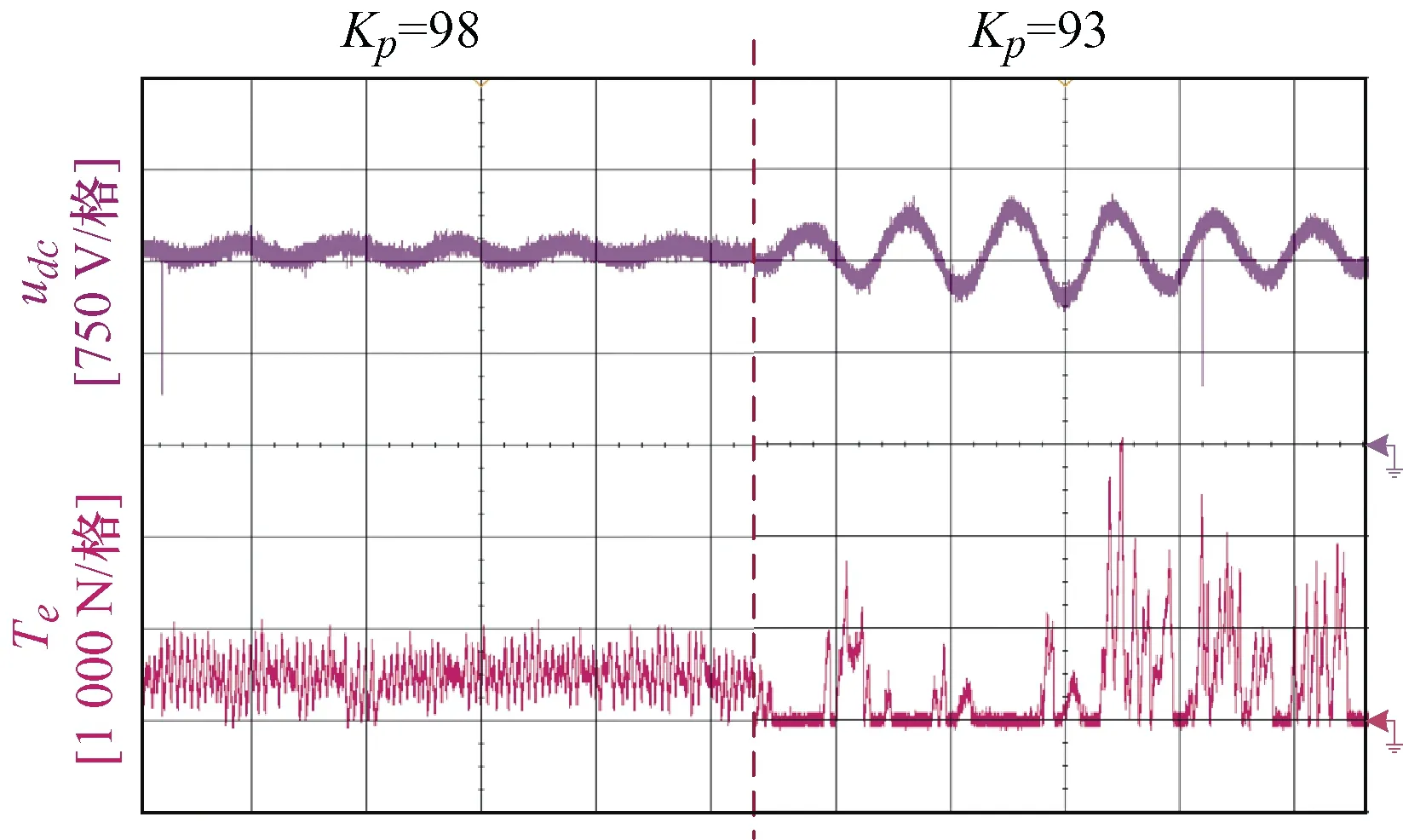
图18 电机响应
综上,第2、3节中的理论分析与试验结果一致,验证了稳定性分析结果的准确性。
6 结论
本文推导了基于复矢量电流控制器的IPMSM电流环闭环传递函数,并依据电流环闭环传递函数求解出系统闭环极点的解析解,利用零极点分布图,分析了各参数对系统稳定性的影响,其主要结论 如下。
(1) 即使在完全解耦的情况下,控制延迟依然可能致使系统失稳,失稳的根本原因是角度延迟在(π/2+2kπ, 3π/2+2kπ)区间内产生了实部为正的极点。
(2) 结合零极点分布规律可知,ωe和Td的增大均会使θd增加,进而不利于系统稳定,而Kp(Kp<0.1/Td)的增加会增大系统带宽,利于系统稳定。在采用复矢量控制电流环完全解耦情况下,角度延迟导致系统失稳的边界条件可近似为

(3) IPMSM带载时复矢量电流环的解耦能力会恶化,虽然增加控制带宽可以提升电机的带载能力,但在延时环节的影响下,复矢量电流环解耦能力进一步恶化,电机调速范围更窄,电机带载能力下降,更易失稳。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
农业工程学报(2022年12期)2022-09-09
导航定位学报(2022年4期)2022-08-15
灌溉排水学报(2022年6期)2022-07-13
农业工程学报(2022年5期)2022-06-22
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
汽车实用技术(2021年1期)2021-01-25
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
演艺科技(2017年1期)2017-03-09
