
Neural network-based fault diagnosis for spacecraft with single-gimbal control moment gyros
2022-08-01 06:12YuandongLIQingleiHUXiaodongSHAO
Chinese Journal of Aeronautics 2022年7期
Yuandong LI, Qinglei HU,*, Xiaodong SHAO
a School of Automation Science and Electrical Engineering, Beihang University, Beijing 100083, China
b Beihang Hangzhou Innovation Institute Yuhang, Hangzhou 310023, China
c School of Aeronautic Science and Engineering, Beihang University, Beijing 100083, China
KEYWORDS Control moment gyro;Fault diagnosis;Fault-tolerant control;Neural networks;Spacecraft attitude control
Abstract This paper proposes a neural network-based fault diagnosis scheme to address the problem of fault isolation and estimation for the Single-Gimbal Control Moment Gyroscopes(SGCMGs) of spacecraft in a periodic orbit. To this end, a disturbance observer based on neural network is developed for active anti-disturbance, so as to improve the accuracy of fault diagnosis.The periodic disturbance on orbit can be decoupled with fault by resorting to the fitting and memory ability of neural network. Subsequently, the fault diagnosis scheme is established based on the idea of information fusion. The data of spacecraft attitude and gimbals position are combined to implement fault isolation and estimation based on adaptive estimator and neural network. Then,an adaptive sliding mode controller incorporating the disturbance and fault estimation results is designed to achieve active fault-tolerant control. In addition, the paper gives the proof of the stability of the proposed schemes, and the simulation results show that the proposed scheme achieves better diagnosis and control results than compared algorithm.
1. Introduction
Control Moment Gyroscopes (CMGs) are usually used as the actuator for large spacecraft due to their torque amplification characteristics. For example, the International Space Station(ISS) launched in 1998, and the Tianhe core module launched in 2021 are all equipped with CMGs. Compared with other momentum exchange devices like reaction wheels,the structure and working principle of CMGs are more complex.So,CMGs are prone to fault and difficult to implement fault diagnosis.Due to long-term high-speed rotating in harsh environments,the rotating mechanism in momentum exchange devices is vulnerable to damage. These faults may lead to control performance degradation, or worse, render mission abortion and hence bring a series of severe problems. For example, it has been reported that two of the four CMGs used in the ISS failed and shut down,and the ISS then operated with only two of the four CMGs. From the lessons learned from these occurred mishaps, it is known that the spacecraft Attitude Control System(ACS) should possess strong fault diagnosis and faulttolerance ability against actuator faults.
Fault-Tolerant Control(FTC) provides an effective tool to deal with actuator faults.In general,FTC schemes can be classified into two types: passive FTCand active FTC.Passive FTC needs neither fault diagnosis schemes nor controller reconfiguration, but it has limited fault-tolerant capabilities.On the contrary,the active FTC is to reconfigure the control system according to the fault diagnosis results from fault diagnosis and detection mechanism and hence can achieve graceful performance degradation.In this paper, a neural network-based fault diagnosis scheme is proposed to perform active FTC.
However, the majority of the observers design for fault diagnosis do not perform fault isolation.As a result, the torque deviation caused by the fault actuator could only be compensated by healthy actuators instead of rectified directly, which may lead to energy loss and overuse of actuators. When multiple time-varying faults occur at the same time, it is generally impossible to achieve fault isolation by simply using attitude information. To solve this problem,Fonod et al. proposed a layered fault isolation scheme for spacecraft equipped with redundant propulsion devices,where both attitude and position information are used.For spacecraft ACS with redundant actuators, the status information of each actuator must be used to perform fault isolation in the case of simultaneous occurrence of multiple time-varying faults. Refs. 10 and 11 use the value of frame angles or flywheel spinning speeds to perform fault estimation for SGCMGs and flywheels respectively, but there is still room for improvement in estimation speed and accuracy.
In recent years, although considerable effort has been devoted to the fault diagnosis problem of reaction wheels,the study of fault diagnosis on SGCMGs has received less attention in the literature.Yue et al.established the fault models of CMGs by analyzing their mechanical structure.Shen et al.used adaptive observers to diagnose the faults of gimbals in SGCMGs, but this method suffers from low accuracy.Farahani et al.developed a data-driven fault diagnosis scheme for CMGs using Support Vector Machine (SVM), which cannot implement fault estimation.
One caveat here is that all the above-mentioned fault diagnosis methods require the establishment of complex observers. As pointed out by Ref. 14, the analogue of Luenberger observers needs to be done in a case by case approach, the Kalman method needs to solve the HJB equation and nonlinear optimal observer often leads to dimensional disasters. Recently, neural networks-based intelligent algorithms have been widely used in various fields. Benefiting from its powerful fitting and memory capabilities, some researchers introduced the neural networks into the observer design and established neural network observers.Wu and Saif replaced a part of the traditional observer with the output of neural network and developed neural network observers.Talebi et al. designed a neural network fault diagnosis observer for sensor and actuator faults with detection, isolation, and diagnosis functions, and proved its stability in detail.An active FTC system integrating a neural network controller was developed by Shen et al.However, none of the above schemes considers the situation where multiple actuators fault at the same time,which limits practical applications.
External disturbances are the key factors that affect the fault diagnosis results, due to the coupling of torque caused by disturbance and faults. The disturbance observer can be employed to efficiently handle the unknown disturbances and fully use the dynamic information of disturbances. Some disturbance observers are used in the control design to improve control performance or perform fault diagnosis.Neural networks are also used to estimate and compensate disturbances actively, for example, Cheng et al. proposed a cycle neural network to fit and compensate for the residual of the fault detection observer, which helps improve the detection ability for small faults in the presence of external disturbances, but they ignored the case in which faults take place in the disturbance observer training phase.
This paper proposes a Neural network Disturbance Observer (NDO) to estimate and compensate the external disturbances actively. According to the estimation results, a fault diagnosis and FTC algorithm for SGCMGs based on neural network were developed. The contributions of the paper are summarized as follows:
(1)An NDO is proposed to enhance the fault detection and fault diagnosis ability for on-orbit spacecraft. Compared with the existing disturbance observers, it has the memory capacity and therefore can decouple the deviation torques caused by the actuator faults and periodic disturbances. Moreover, unlike most neural network-based observers, the proposed scheme considers the case in which faults take place during neural network training.
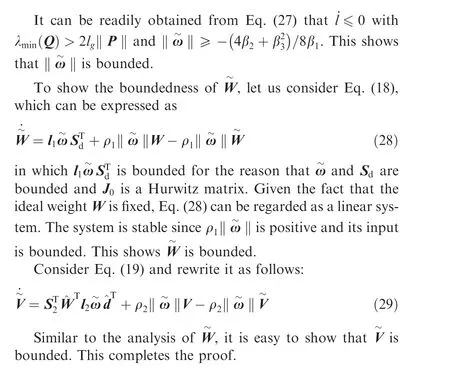
(2) For spacecraft equipped with SGCMGs, fault isolation and high precision fault estimation of time-varying faults are realized by the proposed scheme. Several local observers were developed to achieve fault isolation and preliminary fault estimation. And estimation deviation is compensated by neural networks by combine spacecraft attitude data so that the accuracy of fault estimation is improved.
The remaining part of this paper is organized as follows.Section 2 introduces the spacecraft attitude dynamics and fault models of the SGCMGs. The disturbance observer and fault diagnosis schemes based on neural network are designed in Section 3 and Section 4 respectively. Then, an adaptive FTC controller is proposed in Section 5. Subsequently, numerical simulations are carried out to verify the effectiveness of the proposed scheme. Finally, concluding remarks are given in Section 7.
2. Preliminaries
2.1. Spacecraft attitude dynamics

The dynamic and kinematic equations for attitude motion of spacecraft can be described by where ω ∊Rdenotes the angular velocity of spacecraft with respect to (w.r.t.) inertial frame and expressed in body frame,I ∊Ris the 3×3 identity matrix, (q,q)∊R×R is the unit quaternion that represents the attitude orientation of the spacecraft body frame w.r.t. the inertial frame and satisfies qq+q=1, J ∊Ris the inertial matrix, τ ∊Rand T∊Rrepresent the control torque and disturbance torque respectively, (∙)is the skew-symmetric matrix operator.
2.2. Fault models of SGCMGs
SGCMGs are composed of several Single Gimbal Control Moment Gyros (SGCMG), while an SGCMG consists of a gimbal that can perform one-dimensional movement and a constant speed rotor, as shown in Fig. 1. In the working process:the rotor rotates at a constant speed Ωto generate a constant angular moment h,and the gimbal changes the direction of the rotor hence the direction of the angular moment changed, and then a control torque is generated.
The control torque generated by a healthy SGCMG is
Fig. 1 Structure diagram of an SGCMG.
3. Disturbance observation scheme design
In the proposed scheme, as illustrated in Fig. 3, several adaptive estimators (specific form would be discussed in Section 4.1) were set to judge whether a fault occurs in SGCMGs. The NDO would fit and memory the disturbance when no fault alarm produced by adaptive estimators. The training phase Twould take the time of an orbital period T, and after that, it would turn to the offline shape and output the estimated value of disturbances to the controller.If a fault alarm is produced by adaptive estimators in the training phase, the system would turn into fault diagnosis phase and ignore the observer results from NDO. This scheme could enhance fault diagnosis accuracy if no fault occurs in the first orbital period and retain low-level fault diagnosis ability otherwise.
Based on the spacecraft attitude dynamics described in Eq. (1), the NDO is established by
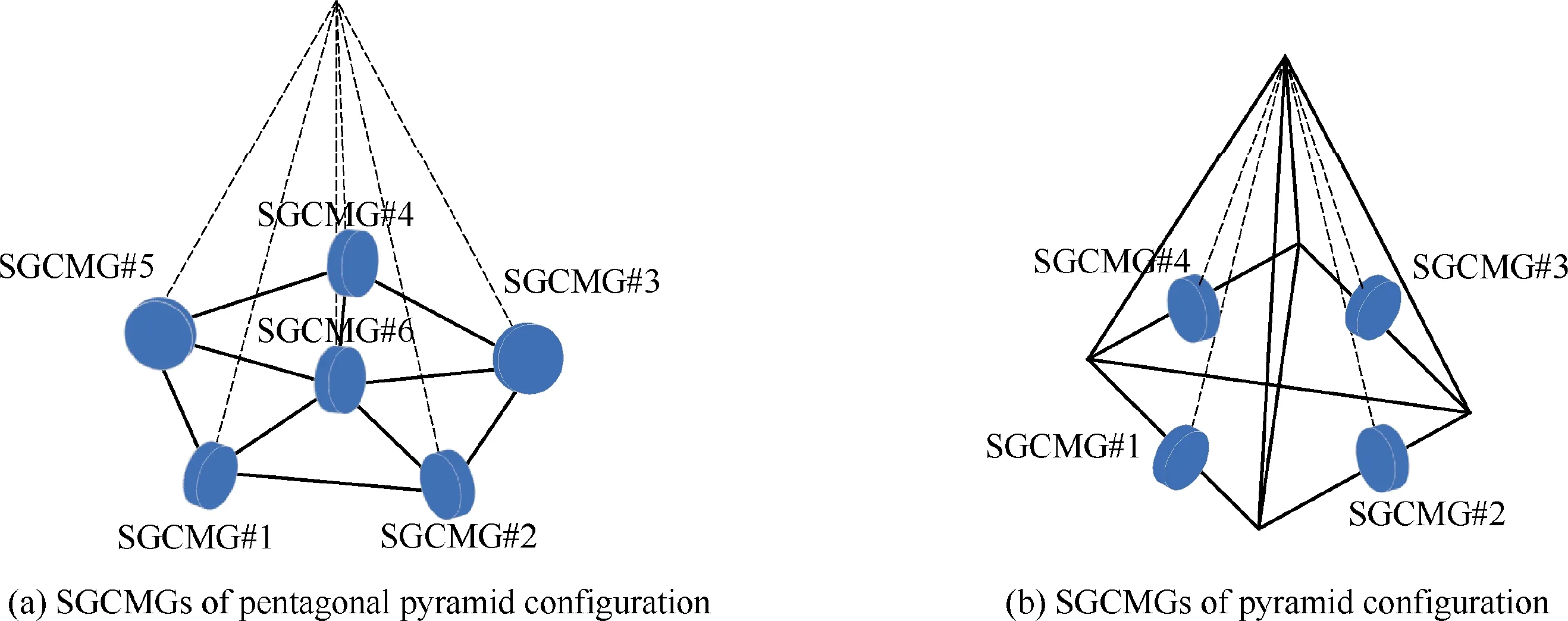
Fig. 2 Structure diagram of SGCMGs.
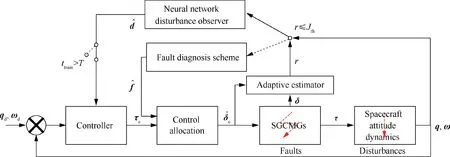
Fig. 3 Architecture of the disturbance observation and fault diagnosis scheme.

Remark 1. Generally,when the disturbance model is unknown,it is difficult to decouple the disturbance and the fault, which may decrease the accuracy of fault diagnosis. The proposed NDO uses the fitting and memory capabilities of neural networks to fit and memorize on-orbit periodic disturbances,which can decouple part of the disturbances. And the proposed scheme takes into account the case that faults occur in the NDO training time.However,a disadvantage of this scheme is that it needs a certain storage space to store health period data.
4. Fault diagnosis scheme design
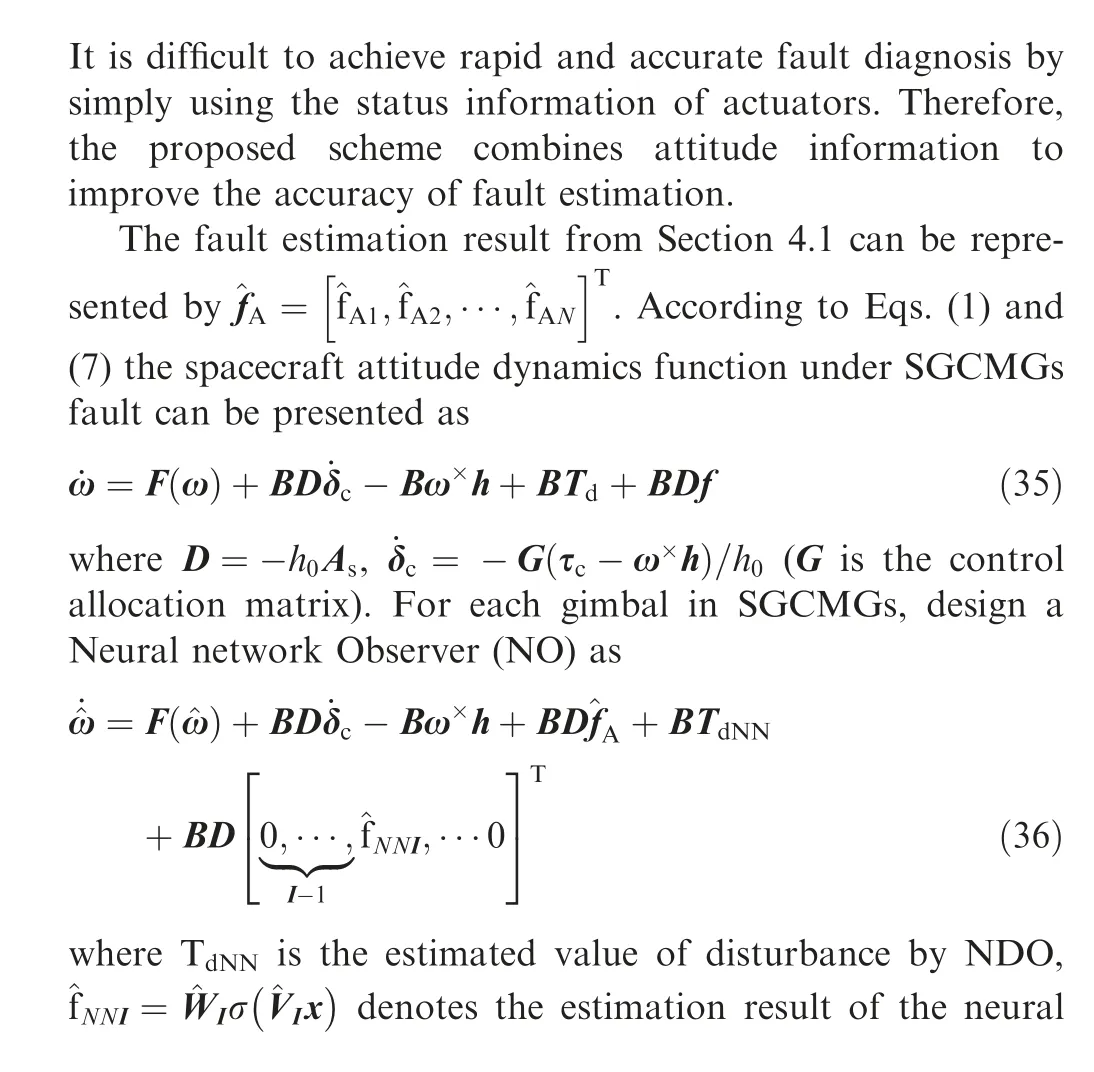
When the disturbances are observed and compensated, it can be considered that the deviation torque is caused by the failure of the actuator.So,fault diagnosis can be performed.As illustrated in Fig. 4, several local observers were developed to achieve fault isolation and preliminary fault estimation. And estimation deviation is compensated by neural networks by combine spacecraft attitude data,so that the accuracy of fault estimation is improved.
4.1. Fault diagnosis using adaptive estimator
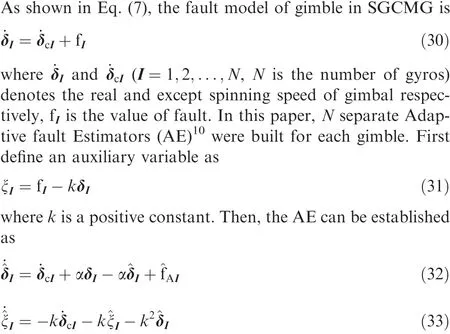
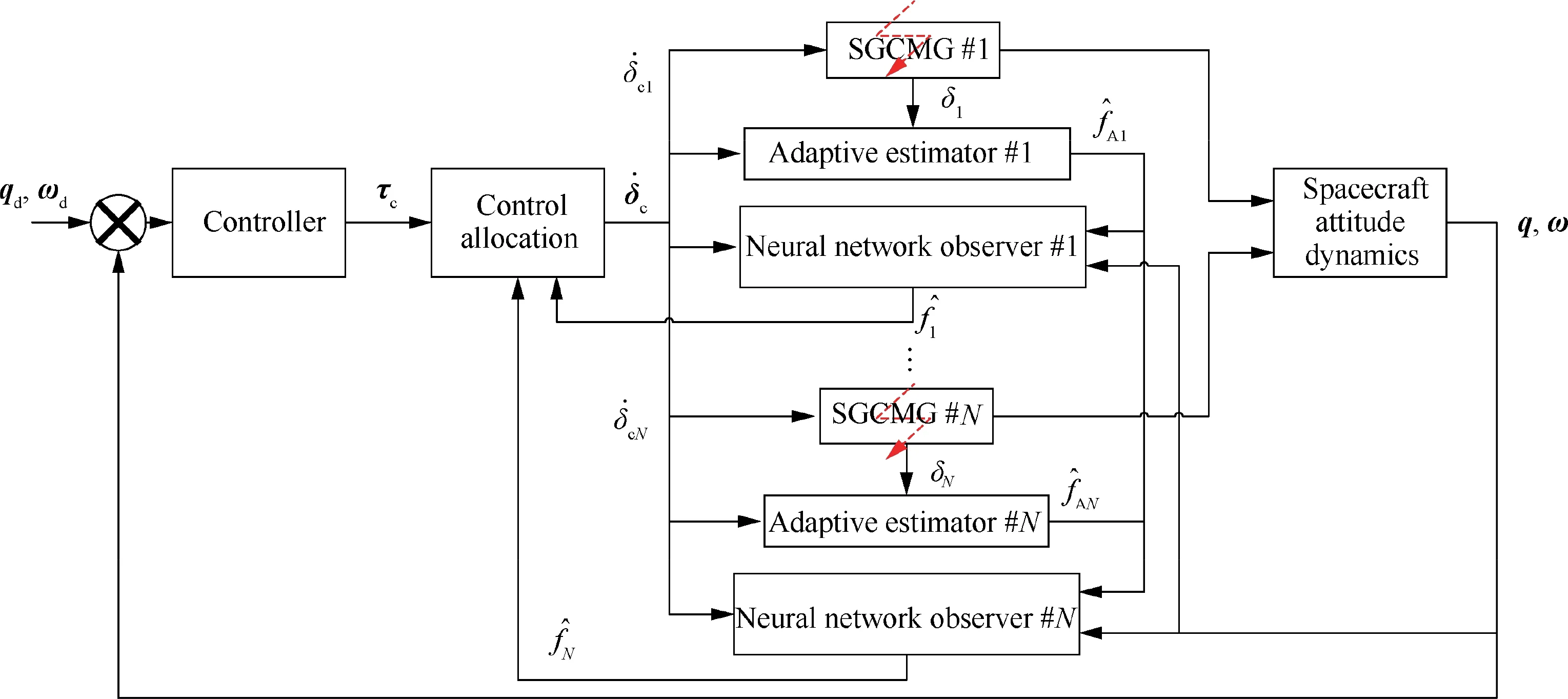
Fig. 4 Architecture of fault diagnosis scheme.

Lemma 1. For the fault model in Eq. (30), if Assumption 4 is satisfied and using the AE as shown in Eqs.(31)to(34),the estimated error would be convergent if k-α<0 and k+2k-2αk+α+1<0.The proof of Lemma 1 can be seen in Ref. 10.
4.2. Fault diagnosis using neural network
5. Fault-tolerant control scheme design
In order to verify the fault diagnosis scheme proposed in this paper, a closed-loop control scheme was formed by the NDO proposed in section 3, the NO proposed in section 4 and an adaptive sliding mode fault-tolerant controller.
Considering the estimated value of disturbance from NDO is T, the control input τis designed as
Note that Eq. (55) implies that V is uniformly ultimately bounded. Consequently, we have s, q, and ^b are uniformly ultimately bounded.So,it can be concluded that the spacecraft attitude control system is stable.
6. Numerical simulation
6.1. Disturbances model
Most of the existing documents only use the combination of sine and cosine functions to represent the interferences, which is deviated from the actual environment.In order to provide a high-fidelity model, this paper established an interferences model for spacecraft on orbit. Gravity gradient torque,aerodynamic damping torque, and sunlight pressure torque are discussed in this paper.
6.2. Simulation conditions
6.3. Simulation of disturbance observation scheme
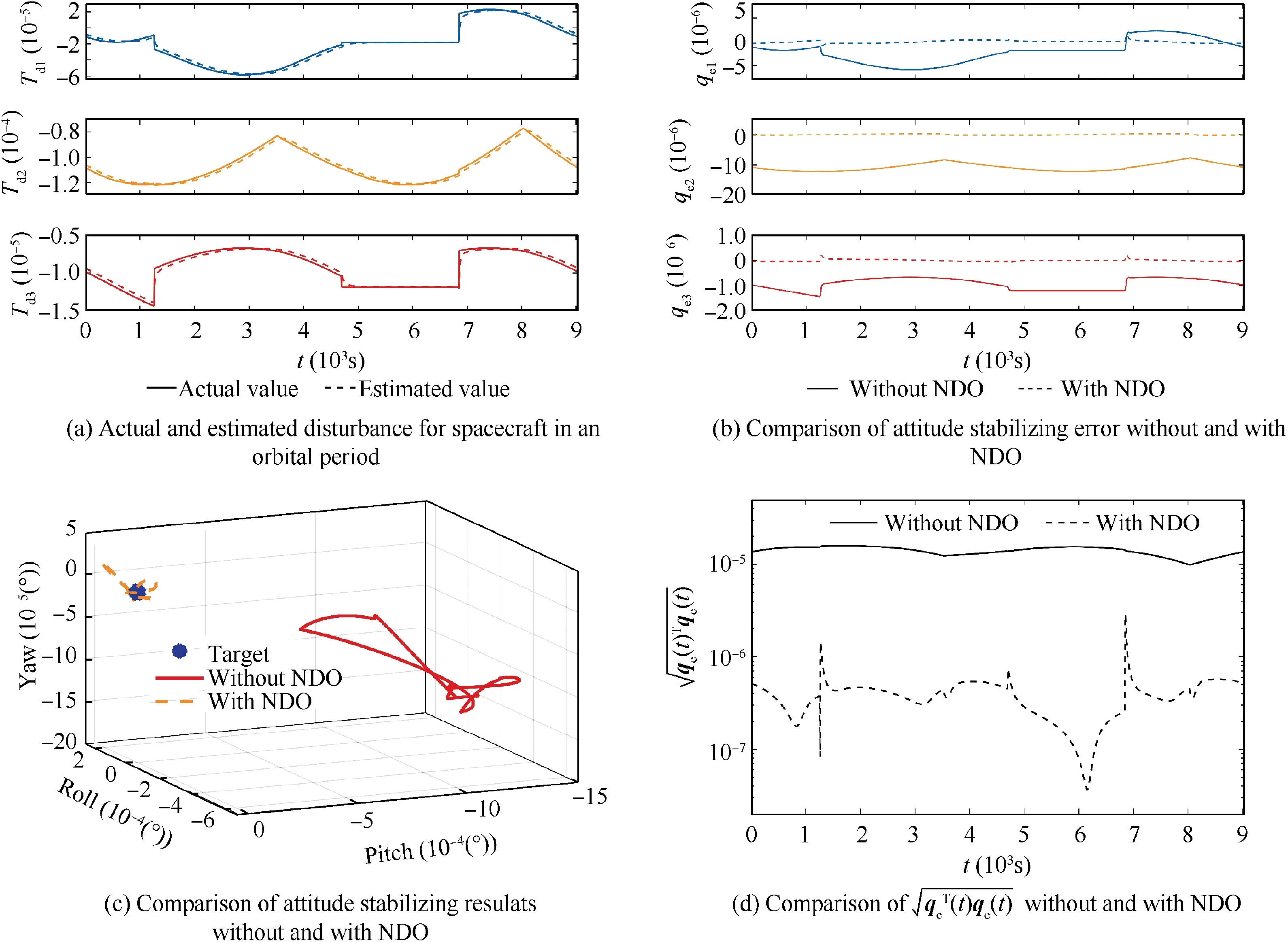
Fig. 5 Disturbance observation performance using proposed neural Network Disturbance Observer (NDO).
6.4. Simulation of fault diagnosis scheme
In this simulation,the fault scenario of gimbals is described in Table 1. r and (t ) is a random number between [-1,1], which changes every 10S. The relationship between fault f,I=1,2,3,4 and gimbals spinning rate ˙δ,I=1,2,3,4 can be seen in Eq. (30). The actual fault, fault estimated by AE(Ref. 10) and the proposed scheme (Eq. (36)) are shown in Fig. 6(a). The fault estimation error of them can be seen in Fig. 6(b). As shown in Figs. 6(a) and 6(b), the proposed scheme can improve the accuracy of fault estimation for both sudden and continuous faults.
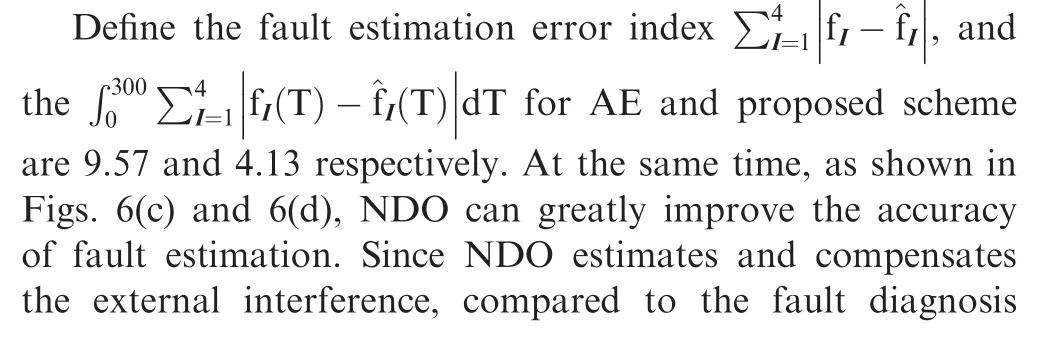
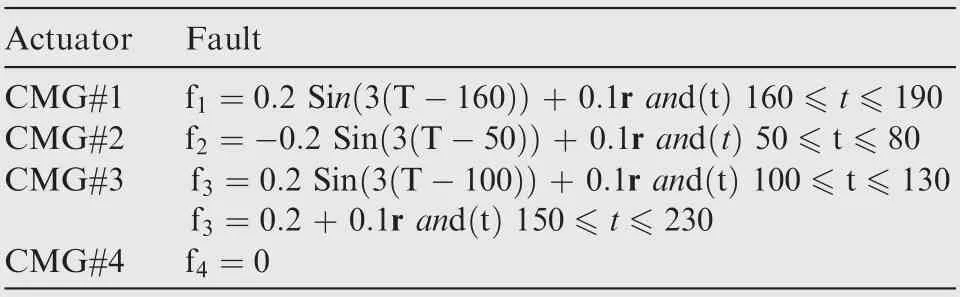
Table 1 SGCMGs fault scenario.
6.5. Simulation of fault-tolerant control scheme
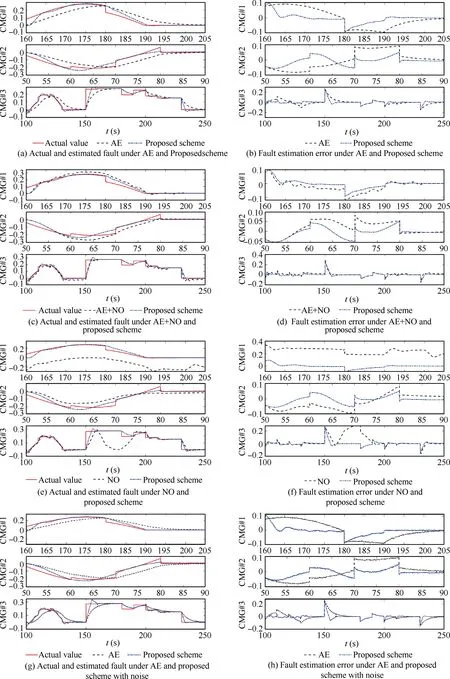
Fig. 6 Fault diagnosis results under the proposed scheme.

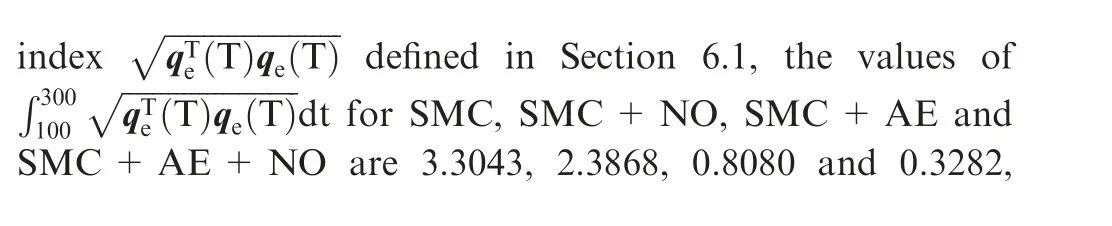
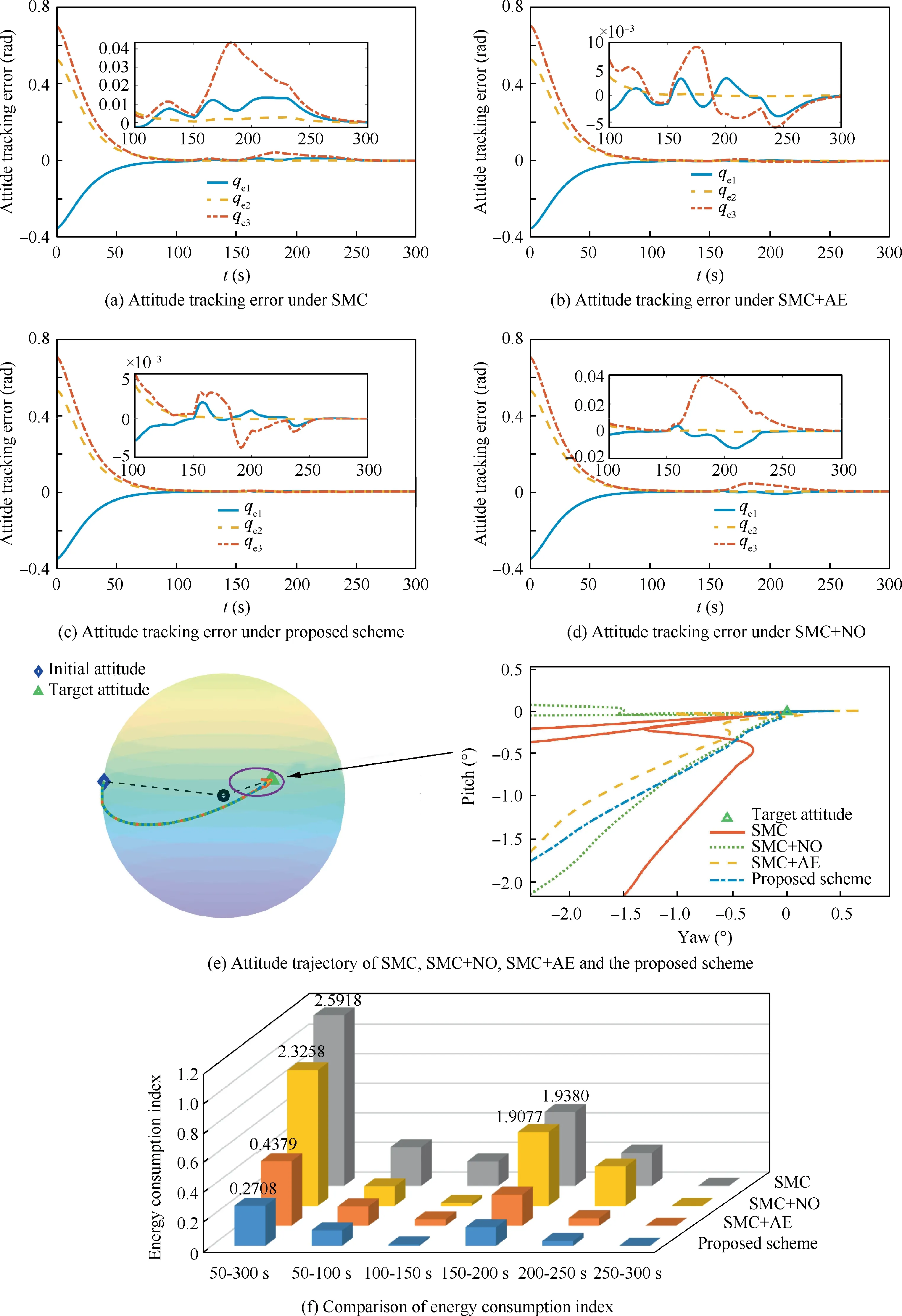
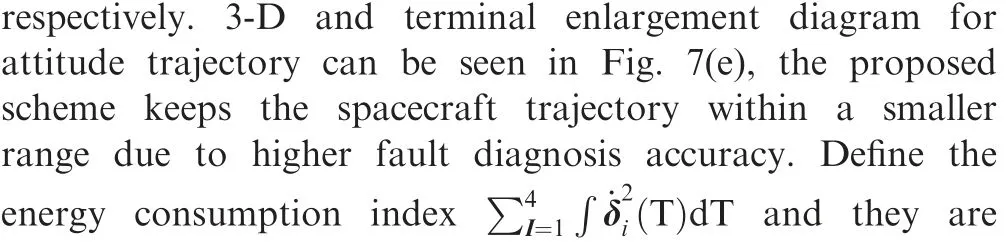
Fig. 7 Control results of the proposed active FTC scheme.
7. Conclusions
In this paper, the fault diagnosis scheme for SGCMGs with spacecraft in periodic orbit has been studied.
(1) The disturbance observation scheme based on neural network proposed in this paper has the ability of fitting and memory disturbance torques. Using this observer for active anti-interference can improve the attitude control and fault diagnosis performance of the spacecraft. And this scheme takes into account the fact that the fault may occur at any time.Theoretical analysis and simulation proved the effectiveness of the proposed scheme.
(2) For spacecraft ACS with redundant actuators, when multiple actuators have time-varying faults at the same time,fault isolation and estimation cannot be achieved only through spacecraft attitude data.In this paper,several local fault adaptive estimators are used to achieve fault isolation and preliminary fault estimation,and then the neural networks are applied to combine spacecraft attitude data to improve the fault estimation accuracy.Lyapunov method is used to prove the stability of the observer. By using a simple adaptive sliding mode controller for comparative analysis,the FTC scheme proposed in this paper can effectively improve the ability of spacecraft ACS under SGCMGs fault conditions.
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
This study was supported in part by the National Natural Science Foundation of China (Nos. 61960206011, 61903018,61633003),the National Defense Basic Scientific Research program of China (No. JCKY2018203B022), Beijing Natural Science Foundation of China (No. JQ19017) and also the China Postdoctoral Science Foundation (No. 2021M690300).
˙W˙V
 Chinese Journal of Aeronautics2022年7期
Chinese Journal of Aeronautics2022年7期
- Chinese Journal of Aeronautics的其它文章
- An online data driven actor-critic-disturbance guidance law for missile-target interception with input constraints
- Study on excitation force characteristics in a coupled shaker-structure system considering structure modes coupling
- Smooth free-cycle dynamic soaring in unspecified shear wind via quadratic programming
- Active and passive compliant force control of ultrasonic surface rolling process on a curved surface
- High dynamic output feedback robust control of hydraulic flight motion simulator using a novel cascaded extended state observer
- Composite impact vector control based on Apollo descent guidance