
Review of control and guidance technology on hypersonic vehicle
2022-08-01 06:01YioDINGXiokuiYUEGungshnCHENJishunSI
Chinese Journal of Aeronautics 2022年7期
Yio DING, Xiokui YUE,*, Gungshn CHEN, Jishun SI
a School of Astronautics, Northwestern Polytechnical University, Xi’an 710072, China
b Shanghai Aerospace Control Technology Institute, Shanghai 201109, China
c Beijing Reserarch Institute of Automation for Machinery Industry Co., LTD., Beijing 100124, China
KEYWORDS Classification of hypersonic vehicles;Control equipmentaerospace applications;Flight profiles;Guidance strategy;Hypersonic vehicles
Abstract Air-breathing hypersonic vehicle has great military and potential economic value due to its characteristics: high velocity, long range, quick response. Therefore, the development of hypersonic vehicle and its guidance and control technology are reviewed in this paper.Firstly,the development and classification of hypersonic vehicles around the world are summarized, and the geometric configuration and mission profile of typical air-breathing hypersonic vehicle are given.Secondly, the control difficulties of air-breathing hypersonic vehicle are introduced, including integrated design of engine and fuselage, static instability, strong nonlinearity, uncertain aerodynamic parameters, etc. According to its control requirements, the control methods considering external disturbance, fault-tolerant control methods, anti-saturation methods, and prescribed performance control methods considering transient performance constraints are summarized respectively. The classification and comparison of various control methods are given,and the frontiers of theoretical development are analyzed. Finally,considering the effects of composite disturbances, the design of terminal guidance law under multiple constraints is overviewed, including guidance law with angle constraint,velocity constraint,acceleration constraint and time constraint.Similarly,the classification of guidance law design methods under different constraints, their advantages as well as the future development trend and requirements are introduced.
1. Introduction
Hypersonic vehicle refers to a winged or wingless aircraft with a flight speed exceeding 5 times the speed of sound. It has the advantages of both spacecraft and aircraft,and has significant military value and potential economic value.The earliest hypersonic aircraft program ‘‘Silver Bird” was proposed by Sanger in 1938. The program attracted the attention of the United States, the Soviet Union and other major countries,and they all rushed to carry out related research on hypersonic flight technology.Over the past few decades, after a large amount of capital investment and cooperation from countries around the world, the United States, Russia, Japan, Britain,Germany, France and other countries have successively made major breakthroughs in hypersonic technology. It can be seen that hypersonic flight technology as a strategic research focuses in the field of aerospace has become the main development direction of the world’s powers.
Hypersonic vehicle can be divided into unpowered ballistic missile or gliding hypersonic vehicle and hypersonic cruise missile or hypersonic aircraft according to whether it has power or not. At this stage, the development of unpowered hypersonic vehicle is relatively mature, while air-breathing powered aircraft includes the latest technologies in the aerospace field:fuselage engine integrated design technology,hypersonic aerodynamic technology, hypersonic thermal protection technology, hypersonic scramjet technology, hypersonic flight control technology,etc.Therefore,air-breathing powered aircraft has low technological maturity and are currently the focus of research in various countries. As a new type of high-speed, large-range, and fast-response aircraft, the Airbreathing Hypersonic Vehicle (AHV) can not only cruise at high speed in the atmosphere, but also travel through the atmosphere as a space transportation vehicle. It has a wide range of applications in the military and civilian fields. In the military field,its advantages are embodied in:large combat airspace, wide range, fast flight speed, high maneuverability,strong penetration ability, flexible deployment and launch methods, high mission execution efficiency, large flight kinetic energy.Because it flies in the near space above 20 km altitude,which has low atmospheric density and low aerodynamic drag,it can effectively and quickly strike various long-range targets around the world.Meanwhile,it can shorten the enemy’s radar detection time and defense system response time.The abovementioned advantages determine that the hypersonic vehicle can be used as a long-range assault weapon launch platform or a direct strike weapon to efficiently complete various military tasks such as surveillance,reconnaissance and strike operations. It has both strategic deterrence capabilities and actual combat capabilities. In the civil field, hypersonic vehicle can be used as a new type of intercontinental passenger/cargo transportation vehicle to improve human life style and living standards.Hypersonic cargo vehicle can easily realize the rapid and accurate remote delivery of high-value materials, improve transportation efficiency, and stimulate global economic growth. Hypersonic passenger vehicle can shorten passenger travel time to improve work efficiency.
As one of the key technologies of hypersonic vehicle, control system design is directly related to flight performance.However, compared to traditional aircraft, the enginefuselage integrated design of AHV results in a strong coupling between the propulsion system and aerodynamic system. In addition,the characteristics of static instability,strong nonlinearity,and uncertain aerodynamic parameters bring huge challenges to its control system design.Not only that,the complex flight environment of hypersonic vehicle is easy to produce external disturbance,which will cause actuator failure,saturation and engine thermal choking of vehicle,resulting in system instability.The actual flight environment of hypersonic vehicle is relatively harsh, and the aerodynamic heat generated by extremely high flight speed can easily cause the actuator to be affected by sudden failures. Hypersonic vehicle is of great value and mission importance. If the actuator failure is not handled timely and effectively, the failure of the mission will cause incalculable losses.Therefore,it is necessary to study fast convergence control algorithm with strong fault tolerance. In extreme flight conditions of hypersonic vehicle, unknown airflows such as gusts and turbulence can easily cause saturation of actuator.When actuator is saturated, the control commands cannot be responded, and the original system becomes uncontrollable. Therefore, it is necessary to study the saturation suppression control algorithm.The transient performance of AHV tracking error has an important influence on flight status. Large overshoots will generate excessive angle of attack,which will result in engine stalling. Therefore, it is necessary to study a control method that simultaneously considers tracking error performance and engine intake conditions for AHV.
Since the guidance law has a direct influence on the formation of guidance commands, the design of guidance law plays an important role in the terminal guidance system of hypersonic vehicle. Due to the complexity of environment, the high maneuverability of target, the nonlinearity, strong coupling and fast time-varying factors of hypersonic vehicle, it is difficult to design the terminal guidance law.In consideration of the composite disturbance formed by various interference factors and terminal constraint conditions, higher requirements are put forward for terminal guidance law design under multiple constraints,which not only needs to meet the requirements of high-precision guidance under terminal constraint conditions, but also needs strong robustness and anti-interference ability.Therefore, it is of great theoretical significance and wide application prospect to seek high precision and high anti-interference terminal guidance law in complex environment. Nowadays, considering the maneuverability and guidance accuracy of hypersonic vehicles have been greatly improved, guidance with only miss distance requirements can no longer meet the requirements of modern warfare.Research on guidance under complex environments and multiple terminal constraints has become an important direction in the research of hypersonic vehicle.
In recent years, scholars have carried out research and discussions on guidance and control methods of hypersonic vehicle, and have achieved many results. Ref. 10 reviewed and classifies waverider design methodologies up until 2016. The waverider applications developed by scholars in the airframe/inlet integration methodology for AHV are reviewed in Ref.5, and the future research and development trends are presented. Bolender describes the development of a comprehensive model for longitudinal dynamics of generic hypersonic vehicle.The subsystem models are derived from firstprinciples and are intended to capture the interactions between different subsystems to provide a representative vehicle model.Meanwhile,the areas are discussed which are important to permit a thorough analysis of vehicle stability, control characteristics and an assessment of its closed-loop performance.In Ref.12,several commonly studied hypersonic flight dynamics such as winged-cone model, truth model, curve-fitted model, control oriented model and re-entry motion were overviewed.The recent research on hypersonic flight control is reviewed and the comparison is presented. Some specific characteristics of hypersonic flight are discussed and the potential future research is analyzed, which considers actuator dynamics,aerodynamic/reaction-jet control,flexible effects and dynamics interaction.
However, as an inseparable technology, guidance and control are more closely related,especially for the large-scale flight of hypersonic aircraft.This paper will summarize the classification, task analysis, guidance and control methods of AHV.The aim is to focus on guidance and control technology of AHV, and provide a useful reference for intelligent autonomous flight integrating guidance and control of hypersonic vehicle.
The organization of the rest of paper is structured bellow:in Section 2,overview and analysis of hypersonic vehicle in different categories are introduced.Meanwhile,geometric configuration and mission profile of AHV are provided. Section 3 analyzes control methods,which deals with the different influences in AHV. Finally, guidance laws with angle, velocity,acceleration and time constraints are reviewed, respectively.
2. Overview and analysis of hypersonic vehicle
For nearly half a century, hypersonic flight technology has been widely valued and deeply studied by aerospace powers such as the United States, Russia, Japan, Britain, Germany,France, India, Australia and China, and a lot of experience has been accumulated. So far, hypersonic vehicles can be divided into three categories: space orbital maneuvering vehicle (aerospace aircraft), gliding reentry vehicle, and Airbreathing Hypersonic Vehicle (AHV). Next, the three categories will be introduced in this Section, respectively.
2.1. Aerospace aircraft
Aerospace aircraft is a type of aircraft which uses rocket engines as propulsion power and has the ability to enter low Earth orbit and re-enter the atmosphere. The main application prospect of aerospace aircraft is to carry out air and space shuttle operations.
In America, its early exploration begins with the X-15 and X-20 manned hypersonic aircraft. After experiencing a series of rocket propulsion vehicles such as X-33 and X-34, the first unmanned space orbit maneuvering vehicle X-37B was finally successfully tested. The mission of FALCON plan is to develop small launch vehicle, namely Common Aero Vehicle(CAV),Enhanced Common Aero Vehicle(ECAV)and Hypersonic Cruise Vehicle (HCV).
Japan has adopted a step-by-step approach to the development of aerospace aircraft. First, HOPE-X has been the focus of development. Since 1994, it has carried out three experiments: Automatic Landing Flight Experiment (ALFLEX),Hypersonic Flight Experiment (HYFLEX) and Orbital Reentry Experiment (OREX).
Britain first proposes the HOTOL aerospace plane plan for horizontal take-off and landing. After the failure of the HOTOL project, its concept is retained and formed the new aircraft Skylon. Skylon is a horizontal take-off and landing,single-stage orbital reusable aerospace aircraft. When Skylon is working, the Sabre engine first accelerates it to a speed of Ma = 5.5 and a height of 26 km, and then closes the inlet and switches to the rocket engine mode to enter orbit.
Germany proposes the two-stage Sanger Aerospace Plane in the 1980 s. The first stage is a carrier aircraft with a turbo ramjet engine, and the second stage is an orbiter with a liquid rocket engine.
In 2001, India proposed a research and development plan for reusable launch vehicle.In June 2019,the verification vehicle of aerospace aircraft developed by India completed its first test launch.
2.2. Gliding reentry vehicle
The flight process of boost-glide re-entry hypersonic vehicle is as follows: first, the vehicle is propelled out of the atmosphere by rocket booster.After the booster is separated,vehicle relies on its own aerodynamic shape for long-distance maneuver glide.The main application prospect of gliding reentry vehicle is strategic missiles.
Typical representatives of America are the US Air Force’s Falcon program and the US AHW project. In 2005, the U.S. Congress cancelled the weapon-related flight tests in FALCON, and used hypersonic technology demonstrators HTV-1, HTV-2, and HTV-3X to verify the technologies of CAV, ECAV and HCV, respectively. HTV-1 uses an improved cone-shaped aerodynamic layout, while HTV-2 adopts a waverider configuration. HTV-2 conducted two flight tests in 2010 and 2011 respectively. The first was used to verify the aerothermal risk, and the second was used to verify the performance of the thermal protection system and large-scale lateral maneuverability. The shape of AHW is different from HTV-2, adopting winglet cone design. On November 17, 2011, AHW successfully completed the first flight test.
In Russia, the ‘‘Needle” project (IGLA) uses a wing-body fusion lift body aerodynamic configuration, using SS-19 missile as a carrier, the vehicle is 7.9 m long, 3.6 m wingspan,2200 kg mass, and test speed Ma = 6–14. The ‘‘Pioneer”missile uses the RS-28 ‘‘Salmat” intercontinental ballistic missile as a booster, and its warhead has a flying speed of more than Ma = 20. In the launch test in December 2018, the‘‘Pioneer” missile successfully flew 6000 km and hit the intended target.
In Germany,the SHEFEX is a new type of reentry aircraft,whose pointed front edge is composed of multi-sided surfaces.On October 27, 2005, SHEFEX-1 flew at Ma = 6 for 20 s. In June 2012,SHEFEX-2 was propelled by a rocket booster to an altitude of 180 km and then reentered.The flight lasted 10 min and the maximum speed reached Ma = 11.
On October 1, 2019, the DF-17 boosted gliding hypersonic missile of China in the shape of a waverider was exhibited. It can glide at the edge of the atmosphere and perform snakelike maneuvering with strong penetration capability.
2.3. Air-breathing hypersonic vehicle
AHV is a type of hypersonic aircraft powered by scramjet.The main application prospects of AHV are tactical cruise missiles,unmanned aerial vehicles with integrated surveillance and combat, and intercontinental fast transport aircraft. The exploration of AHV began in 1955, and the early research work was mainly carried out on the related technology of scramjet.
In America, National Aerospace Plane (NASP) was proposed by NASA to design a hydrogen-fueled single-stage AHV X-30, but it only stayed in the phase of scaling model research. After the cancellation of the NASP plan, the Hyper-X plan has attracted the attention of the military. Its purpose is to study and verify the scramjet technology and integrated design technology which can be used for hypersonic aircraft and reusable space shuttle system. The plan is divided into four types of test aircraft: X-43A to X-43D.X-43A adopts the shape of waverider, with a length of 3.66 m, a width of 1.53 m, a height of 0.66 m and a mass of 1360 kg. So far, X-43A has conducted three flight tests.The mission profile of the third test flight on November 16,2004 is introduced as below: The X-43A is first carried by the B-52B bomber and released at an altitude of 12 km,and then reaches the altitude of 29 km under the propulsion of the Pegasus booster rocket. After being separated from the booster, the X-43A’s own engine ignites for about 10 s. The maximum speed of X-43A is close to Ma = 9.8, and the powered flight distance is about 33 km. After the fuel is exhausted, X-43A continues to glide for 6 min and crashes into the Pacific Ocean after 1368 km.
HyTech is a hypersonic development plan proposed by the US Air Force in 1995.The X-51A of HyTech has the shape of a waverider, with a length of 7.62 m, a maximum width of 0.5842 m, and a mass of 1788 kg. X-51A is composed of solid rocket booster, interstage and cruise aircraft. X-51A has conducted four flight tests.The fourth test on May 1,2013 is basically successful.The X-51A is first carried by a B-52H bomber and launched from an altitude of 15.2 km, and then the booster works for 26 s to accelerate X-51A to Ma = 4.8. After being separated from the booster, the scramjet ignites and the power flight lasts for 240 s.Then,X-51A climbs to an altitude of 18 km with a speed of Ma = 5.1. After the engine is shut down, X-51A continues to fly for about 500 s and then crashes into the sea.
The Hyfly project was jointly initiated by DARPA and the Office of Naval Research in 2002 to verify a hypersonic vehicle propelled by a dual-combustion ramjet with Ma = 6 cruising capability. The Hyfly missile adopts an axisymmetric design.The ship-launched and submarine-launched missiles are 6.5 m long and have a mass of 1725 kg, while the airlaunched missiles are 4.65 m long and have a mass of 1044 kg.
In December 2013, the Air Force and DARPA combined the Hypersonic Air-breathing Weapon Concept(HAWC)project with the Tactical Boost Glide project to form the new HSSW project. In 2016, Lockheed Martin won the contract for the HSSW project.
The earliest Russian hypersonic flight test is the ‘‘Cold”program. The ‘‘Cold” program test vehicle is modified from the air defense missile C-200,which is a two-stage parallel missile with four solid rocket boosters tied around the missile body. The axisymmetric scramjet is installed on the head of the missile. The ‘‘Zircon” air-breathing hypersonic anti-ship missile adopts a waverider configuration with a range of 300–400 km and a speed of about Ma = 6–8. It can be launched by a shipboard general vertical launch system or an air-based Tu-22M bomber.
France implemented the National Hypersonic Research and Technology Program from 1992 to 1997, and finally successfully develops the Chamois scramjet. Since 1999, France has started the research project of Promethee cruise missile,which has a length of 6 m, a mass of 1700 kg, and a speed of Ma = 2–8.
The different classifications of hypersonic vehicles are summarized in Table 1.
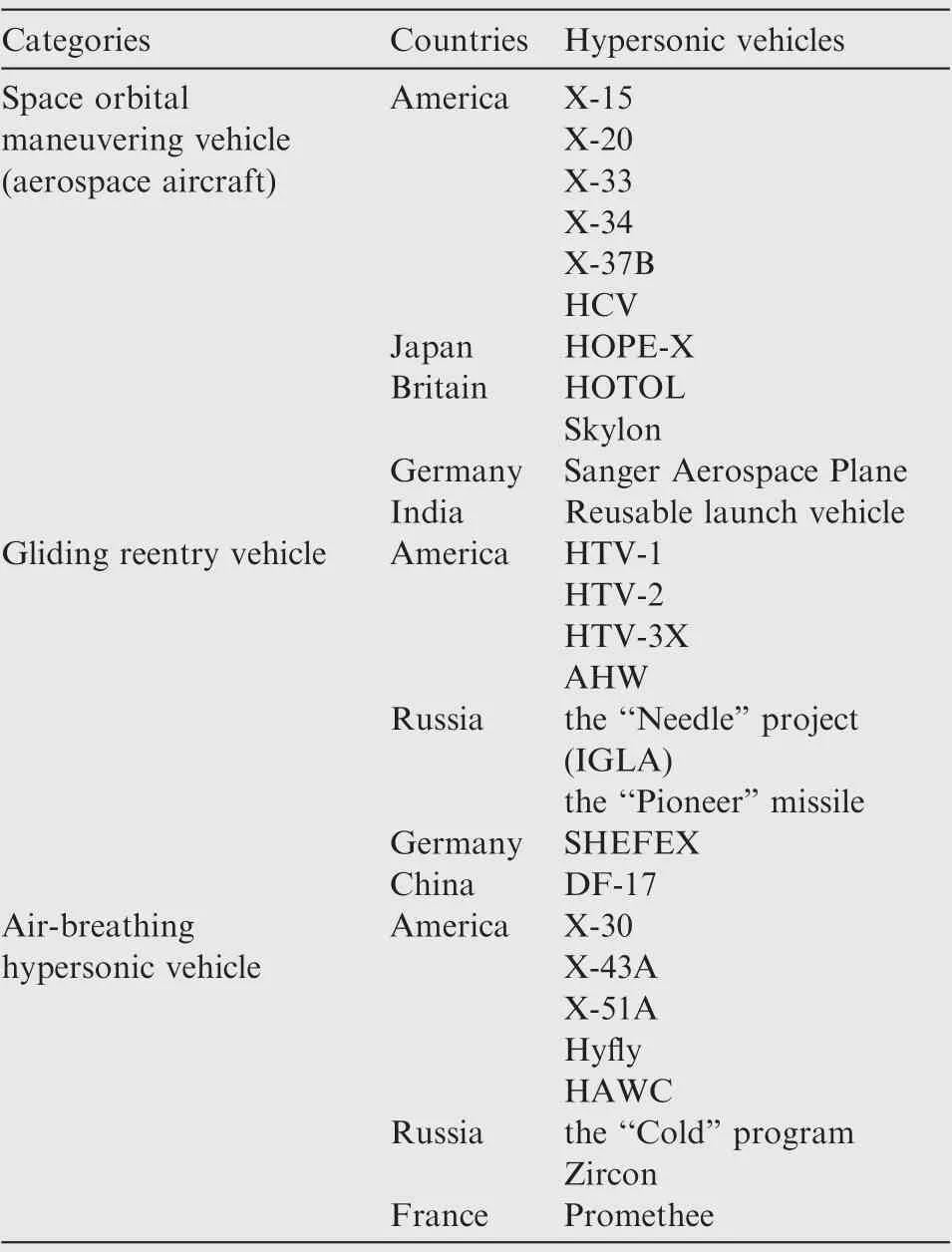
Table 1 Different classifications of hypersonic vehicles.
2.4. Geometric configuration and mission profile of AHV
The slender and lightweight fuselage/engine integrated design of AHV results in a strong coupling effect between the aerodynamic system, the propulsion system and the fuselage structure. The model in this paper is based on the AHV model jointly designed by NASA Langley Research Center, the US Air Force Research Center and the Ohio State University.The longitudinal geometry of vehicle is shown in Fig. 1.During high-speed flight, the forebody with the shape of waverider will produce an attached shock wave, which generates a large lift, and at the same time pre-compresses the airflow at the inlet of air-breathing engine. After airflow enters the engine, it mixes and burns with fuel in combustion chamber. The resulting high-temperature airflow is expanded and ejected through the tail nozzle to generate thrust. The afterbody of vehicle is used as the external nozzle of engine, which can further increase the pressure of airflow at the outlet of engine and increase the thrust and lift.It can be seen that the fuselage/engine integrated design of AHV can provide a larger lift-to-drag ratio and thrust compared with the conventional aircraft, but it also leads to a strong coupling between the aerodynamic and propulsion systems.The geometric parameters of the shape in Fig. 1 are shown in Table 2.
According to Ref. 21, the flight mission profile of AHV in this paper is given as:
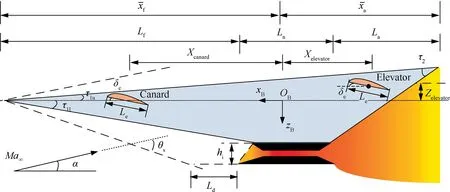
Fig. 1 Geometry configuration of AHV.16,17
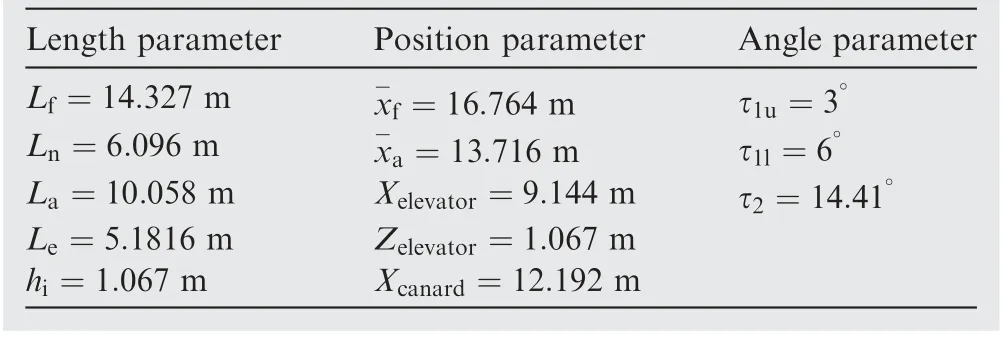
Table 2 Geometry parameters of air-breathing hypersonic vehicle.20
It can be seen from Fig.2 that the flight mission of AHV is divided into five phases. After launching by carrier aircraft at the launch point, the first phase is boost phase. The vehicle completes the separation operation at the predetermined separation window (22 km, Ma = 7) under the push of solid rocket booster. The second phase is the transitional phase.At this phase, the inlet of engine is opened and the attitude is adjusted to the allowable range of engine ignition.The third phase is the climbing phase, where the scramjet is ignited and the AHV continues to accelerate and climb until it reaches the predetermined cruise speed and altitude. The fourth phase is the cruise phase, AHV cruises along the planned trajectory under the nominal cruise conditions (26 km, Ma = 7.8). The last phase is the unpowered gliding phase, AHV shuts off the engine and performs a dive attack or descending landing according to different mission requirements.
The equations of the longitudinal dynamics for AHV are given as follow:
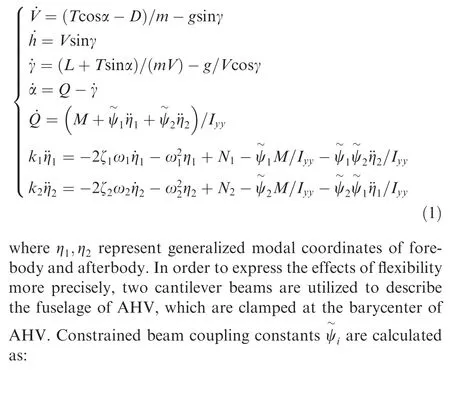
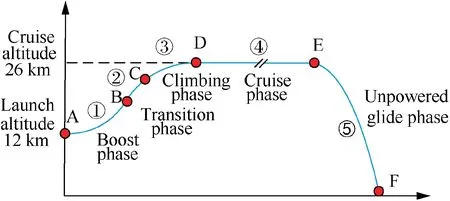
Fig. 2 Mission profile of AHV.
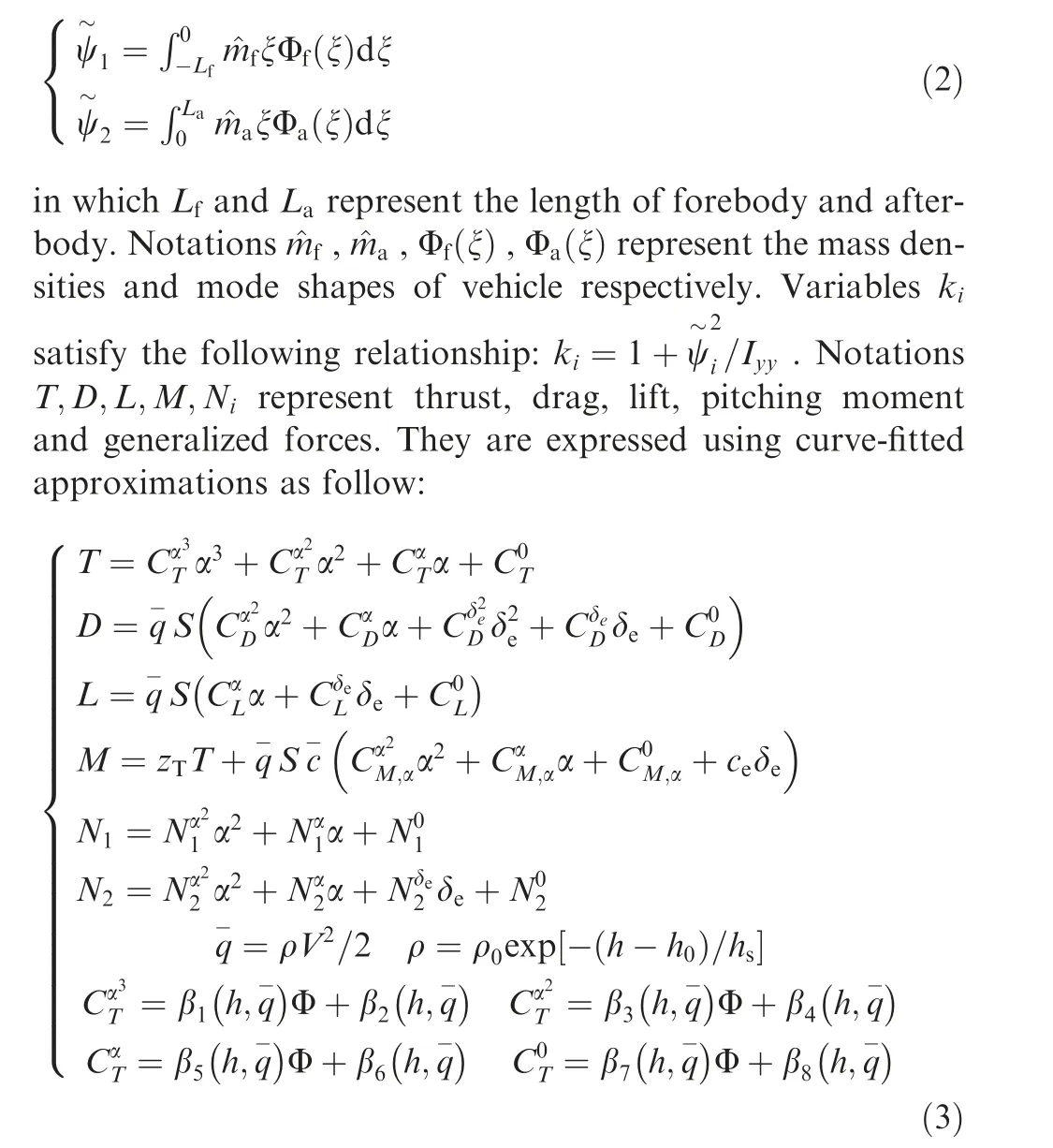
where δ,Φ are elevator angular deflection and fuel-to-air ratio. Variables q,ρ are dynamic pressure and air density.Notations S,c,zrepresent reference area,mean aerodynamic chord and thrust to moment coupling coefficient respectively.Readers are recommended to refer to Tables A1-A7 in Appendix of Ref. 14 for detailed definitions and values of model coefficients.
3. Control methods of hypersonic vehicle
Compared with traditional aircraft, AHV has the characteristics of strong nonlinearity and static instability. Due to the influence of scramjet, there will be a strong coupling between the propulsion system and aerodynamic system.In addition,due to the complex aerodynamic phenomena of its working environment and the difficulty of obtaining accurate aerodynamic parameters, the vehicle is vulnerable to external disturbances and parameter perturbations. All the above-mentioned problems cause the control problems of AHV to be complex and extremely challenging.
In order to accurately describe the characteristics of hypersonic vehicles, since the 1990 s, relevant scholars have carried out a lot of work on the modeling of hypersonic vehicles.Bolender and Doman proposed a‘‘truth model”which embodies the strong coupling between structural, aerodynamic and propulsion dynamics.However, due to the complexity of the‘‘truth model”,in order to facilitate practical use,Parker approximates the force and moment expressions by polynomial fitting to obtain a curve-fitted model. Not only that, by means of ignoring the weaker elevator coupling,Parker further simplifies and obtains a control-oriented model.
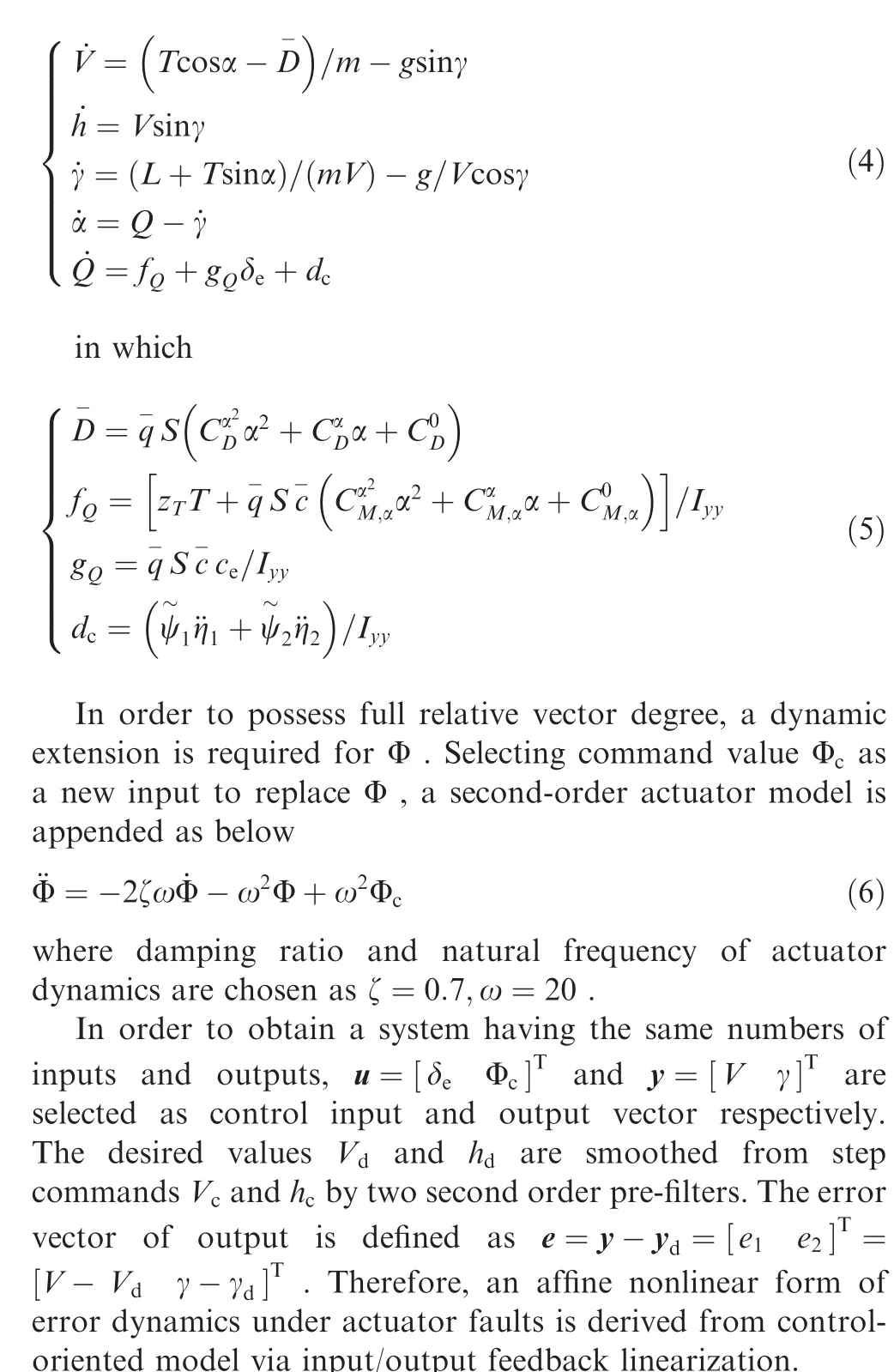
Considering rigid-flexible couplings as disturbances and neglecting weak elevator couplings, Eq. (1) turns to a control-oriented model:
Considering that AHV has many control difficulties mentioned above,traditional control methods cannot meet its performance requirements. Therefore, in recent years,the control problem of AHV has attracted great attention from scholars.Due to the complicated external flight environment of AHV,it is easy to result in actuator failure, saturation, and thermal choking of scramjet, causing system instability. Thus, the following is an overview of the tracking control methods of AHV in climbing and cruising stages according to different control requirements.
3.1. Control method considering the influence of external disturbance
So far, many advanced control theories have been applied to the control system design of AHV, such as: LQR control,robust control, fuzzy control, neural network control, backstepping control, sliding mode control, etc. Parker et al.applied an integral augmented LQR controller to compensate the uncertainties in the control-oriented model.Rehman et al. proposed a minimum–maximum LQR controller for AHV.Qin et al. designed a robust parameter dependent receding horizon Hcontroller based on a linear parameter varying model simplified from AHV.In Ref., dynamics of AHV was firstly approximated by Takagi–Sugeno fuzzy modeling technique. Based on the acquired nonlinear model,an Hdynamic output feedback controller was designed to enhance robustness. An adaptive neural control algorithm considering input constraints was proposed by Bu et al. in Ref. 31, in which lumped nonlinear dynamics is approached by neural network. In order to reduce computational load, a novel improved backstepping and MLP scheme were combined with neural network approximation in Ref. 32. Based on the theoretical algorithm in Ref. 33, Zhang et al. applied a quasi-continuous high-order sliding mode controller to drive AHV to track the desired commands in finite time, in which chattering is weakened by manually increasing the relative degree.Based on Levant’s theory in Ref. 35, Wang et al.design a new homogeneous high order sliding mode controller which can generate a continuous control signal to achieve finite-time convergence of tracking errors.In Ref. 37, an adaptive backstepping scheme was combined with a sliding mode disturbance observer. Ref. 38 designed a finite-time disturbance observer and a continuous second-order sliding mode controller based on super-twisting algorithm,which can realize the finite-time control of tracking errors and finite-time estimation of disturbances. Cao et al. designed a nested arbitrary order sliding mode controller for AHV.The controller parameters are determined by hybrid particle swarm optimization.
Through the investigation and analysis of the control methods for AHV,it can be known that LQR,robust control,fuzzy control, neural network control, adaptive control and other methods can only ensure the tracking error to achieve asymptotic convergence or exponential convergence.Sliding mode control has attracted more attention because of its characteristics of finite-time convergence,but the chattering phenomenon caused by discrete control signal of traditional sliding mode controller limits its application in aerospace field. In order to solve the problem, scholars choose super-twisting algorithm to design controllers,which can suppress chattering effectively by hiding the discrete sign function under an integral term.However, the limitation of super-twisting controller is that it is just suitable for the systems with relative degree equal to one. In order to be applied to higher-order systems, Ref. 41 proposed a higher-order super-twisting algorithm. However,it is difficult to adjust the higher-order super-twisting algorithm because of its numerous parameters.Therefore, it is necessary to study and analyze how to guarantee the robustness and finite-time convergent characteristics of AHV against disturbances based on sliding mode control theory, and at the same time effectively suppress chattering.The advantages and disadvantages of the above-mentioned control methods are compared in Table 3.
3.2. Fault-tolerant control method considering the failure of actuator
The actual flight environment of AHV is harsh and the aerodynamic heat generated by high-speed flight can easily cause the actuator to encounter sudden failure,which will lead to deterioration of flight control performance and even catastrophic accidents. Because AHV is expensive and is usually used to perform critical tasks, it is necessary to study effective faulttolerant control methods to ensure that AHV can still work normally in the event of actuator failures. The existing faulttolerant control methods are usually divided into two categories: active fault-tolerant control and passive fault-tolerant control.Active fault-tolerant control improves the faulttolerant performance of system through real-time online reconfiguration of controller. Unknown faults are identified through adaptive schemes or fault detection and isolation mechanisms.Compared with passive fault-tolerant control,active fault-tolerant control is less conservative.However,passive fault-tolerant control does not require controller switching or reconfiguration. Thus, passive fault-tolerant control can avoid the time delay caused by fault detection and reconfiguration mechanisms, and can improve the reliability of control system.Many advanced control theories can be used in the design of passive fault-tolerant controllers for AHV.Refs.48,49 designed dynamic inversion and command filtering backstepping controllers for faulted AHV, in which adaptive laws are proposed to estimate unknown maximum upper bound of disturbance and minimum value of actuator efficiency factor at real time. Adaptive neural controller was designed with radial basis function neural networks approaching nonlinear lumped disturbances in Ref. 50. Huand Mushageet al. used fuzzy logic systems to estimate the unknown nonlinear functions generated by actuator failures and external disturbances.Ref.53 used a disturbance observer to estimate the effect of actuator faults and makes feedforwardcompensation in backstepping controller. Compared with the above-mentioned asymptotically and exponentially convergent fault-tolerant control methods, the finite-time convergent sliding mode control can achieve faster convergent speed and higher convergent accuracy.Sun et al.designed a fast adaptive terminal sliding mode controller for faulted AHV.In Ref.55,an integral sliding mode controller combined with adaptive update law was used to estimate the minimum value of the efficiency factor of actuator. Yu et al. presented a fault-tolerant control scheme for AHV via synthesizing a finite-time integral sliding surface and a fixed-time observer.Li et al.designed a new type of fault-tolerant controller for AHV,which combines a fixed-time disturbance observer, slotine’s sliding surface and a fixed-time second-order reaching law.
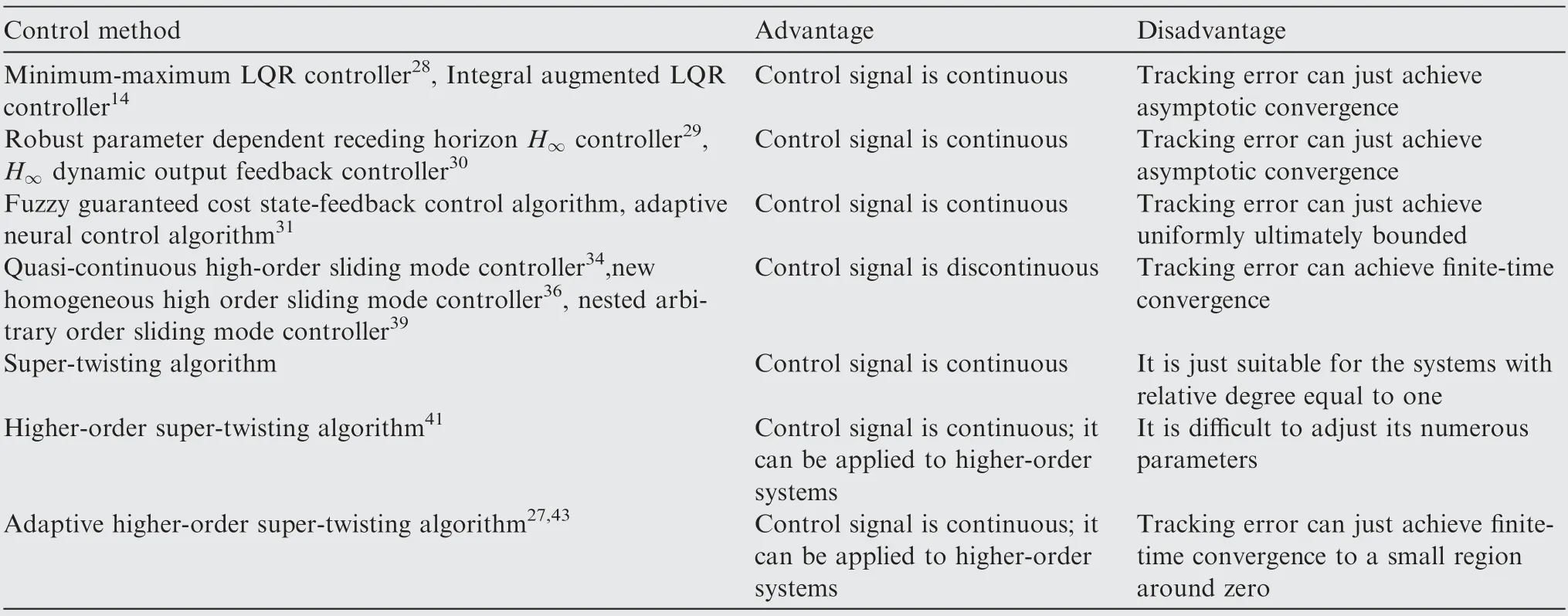
Table 3 Comparison of different methods considering the influence of external disturbance.
Considering AHV is statically unstable, significant performance degradation and even instability of closed-loop system may happen if faults cannot be accommodated within the allowable amount of time. Compared with traditional finitetime sliding mode control, fixed-time control can also guarantee the system states to converge in a finite time,but the upper bound of its convergent time is independent of initial conditions.Therefore, it is essential to develop fixed-time controller for faulted AHV, which can improve response and reliability of the closed-loop system. By applying the fixed-time controller, system states can be rapidly stabilized before they escape to infinity under abrupt actuator faults. The definition of fixed-time convergent algorithm was first proposed by Polyakov.Although the fixed-time convergent control methods have been applied in recent years, it can only be used in second-order systems, and will cause singularity when used in higher-order systems.At present, some scholars proposed a continuous fixed-time high-order regulator and design integral sliding mode surface based on it to avoid singularity.The existing fault-tolerant controllers of AHV only have partial fixed-time convergent characteristics,which can only guarantee the fixed-time convergence of sliding mode variables or observer errors but cannot guarantee the fixed-time convergence of tracking errors.Therefore, how to ensure that the tracking errors of AHV affected by actuator faults achieve non-singular fixed-time convergence is an important research topic.The advantages and disadvantages of the abovementioned fault-tolerant control methods are compared in Table 4.
3.3. Anti-saturation control method considering input limitation
During the flight of AHV,fuel-to-air ratio is required to maintain the operating conditions for sustaining scramjet.Otherwise, the fatal thermal choking may be aroused, which will cause the scramjet to stop working and even lead to catastrophic accidents.The constraint on elevator angular deflection is induced by practical mechanical limitations.Considering input saturation of AHV often severely limits the system performance, gives undesirable inaccuracy or leads to instability, it is necessary to apply controllers which can effectively suppress actuator saturations in AHV. The existing anti-saturation schemes can be divided into the following two categories: one-step approach and anti-saturation compensation approach.The one-step approach considers input constraint at the beginning of controller design.However,this approach sacrifices global performance of closed-loop system,in order to ensure the stability of system under the influence of actuator saturation.Thus,the controller designed in this way is too conservative to achieve good performance when actuator is not saturated.The anti-saturation compensation approach consists of two parts: nominal controller and auxiliary compensator.The role of nominal controller is to make system achieve desired performance when actuator is not saturated. The function of auxiliary compensator is to weaken the effects of saturation, which guarantees the stability of saturated system and reduces the saturation time of actuator.When actuator is saturated, compensator can generate auxil-iary variable to guarantee the stability of system and make actuator get rid of saturated region faster. When actuator is no longer saturated,auxiliary variable converges automatically to restore system performance under nominal controller.Therefore, compared to one-step approach, the antisaturation compensation approach can maintain better control performance regardless of whether actuator is saturated or not. Various effective anti-saturation auxiliary compensators have been proposed over the past decades. Ref. 71 designed a new anti-saturation compensator based on hyperbolic tangent function. An applies the traditional exponential convergent anti-saturation compensator to backstepping controller and combines the nonlinear disturbance observer to compensate the influence of unknown lumped disturbance.Tanand Buet al. designed a novel type anti-saturation compensator and its high-order form based on fractional power term.Then,the novel compensator is combined with neural network sliding mode control to successfully solve the problem of limited actuators of AHV.In Ref.75,Chen et al.combined a terminal sliding mode controller based on a disturbance observer with a finite-time convergent anti-saturation compensator to achieve better tracking performance and faster closed-loop response speed. The advantages and disadvantages of the above-mentioned anti-saturation control methods are compared in Table 5.
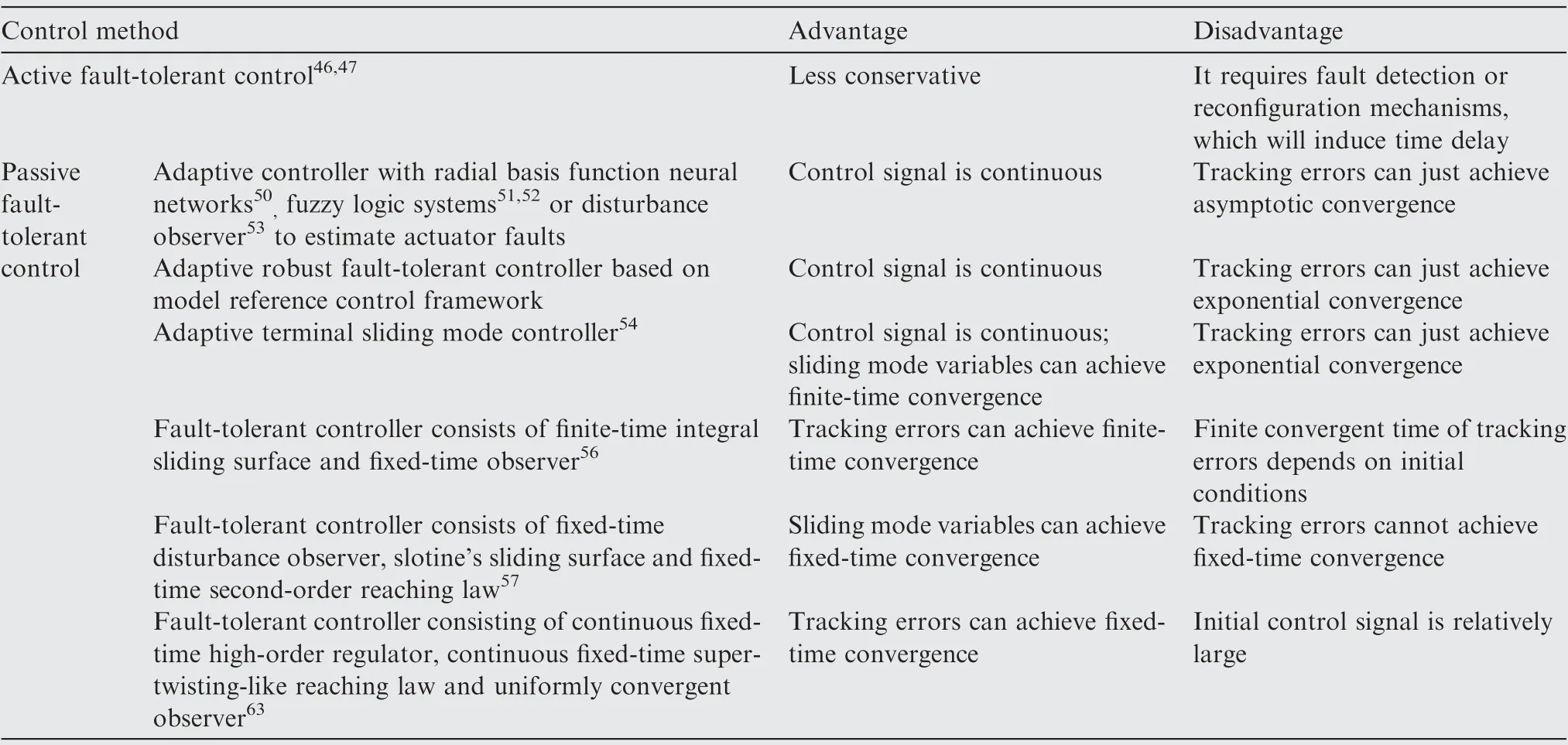
Table 4 Comparison of different fault-tolerant control methods.
3.4. Prescribed performance control method considering transient performance constraints
In the process of flight control, the transient performance of AHV needs to be paid attention to as much as the steadystate performance. If the overshoot of tracking error is too large,the angle of attack will be too large,which cannot maintain the intake of scramjet and will cause the engine to stall.Therefore, it is necessary to design prescribed performance control for transient performance of AHV.Prescribed performance control refers to the control method which enables the tracking error to meet the expected overshoot,convergence rate, and steady-state error. The existing prescribed performance control is mainly divided into three categories: funnel control method, barrier Lyapunov function method and coordinated transformation method.In Ref. 78, Bu first applied the funnel control method to AHV to limit the transient and steady-state performance of velocity and altitude tracking errors. However, the limitation of funnel control is that it can only be applied to systems with a relative order of one or two.In Ref.79,Dong et al.added a barrier Lyapunov function in adaptive finite-time control to limit the tracking errors of hypersonic vehicle. However, the limitation of barrier Lyapunov function method is that the controller needs to be redesigned when the Lyapunov function changes.The coordinatedtransformation method is a scheme proposed by Bechlioulis and Rovithakis.The method first designs a performance boundary function, and then transforms the tracking error of system state to obtain a new unconstrained coordinate. By designing the control law to ensure that the new coordinates are bounded, the original tracking error can be limited within the performance boundary function. As an important part of the coordinated transformation method, the performance boundary function directly determines the performance of tracking error, so researchers focus more on design and improvement of performance function. In Ref. 81, Bu used a performance function which has the traditional exponentially convergent form and applies the inverse hyperbolic tangent function for coordinated transformation. Ref. 82 and Ref. 83 were based on hyperbolic cotangent and hyperbolic cosecant functions to design performance boundary functions. Compared with traditional methods, the two schemes do not need to accurately know the initial value of tracking error.In order to improve the traditional methods,Liu et al.designed a finitetime performance function, which can ensure that the performance function accurately converges to a steady-state value at a given time.Wang and Hu design a performance function that varies with reference command signal, which can prevent the control input from exceeding the limit or chattering when the reference signal changes drastically.The advantages and disadvantages of the above-mentioned prescribed performance control methods are compared in Table 6.
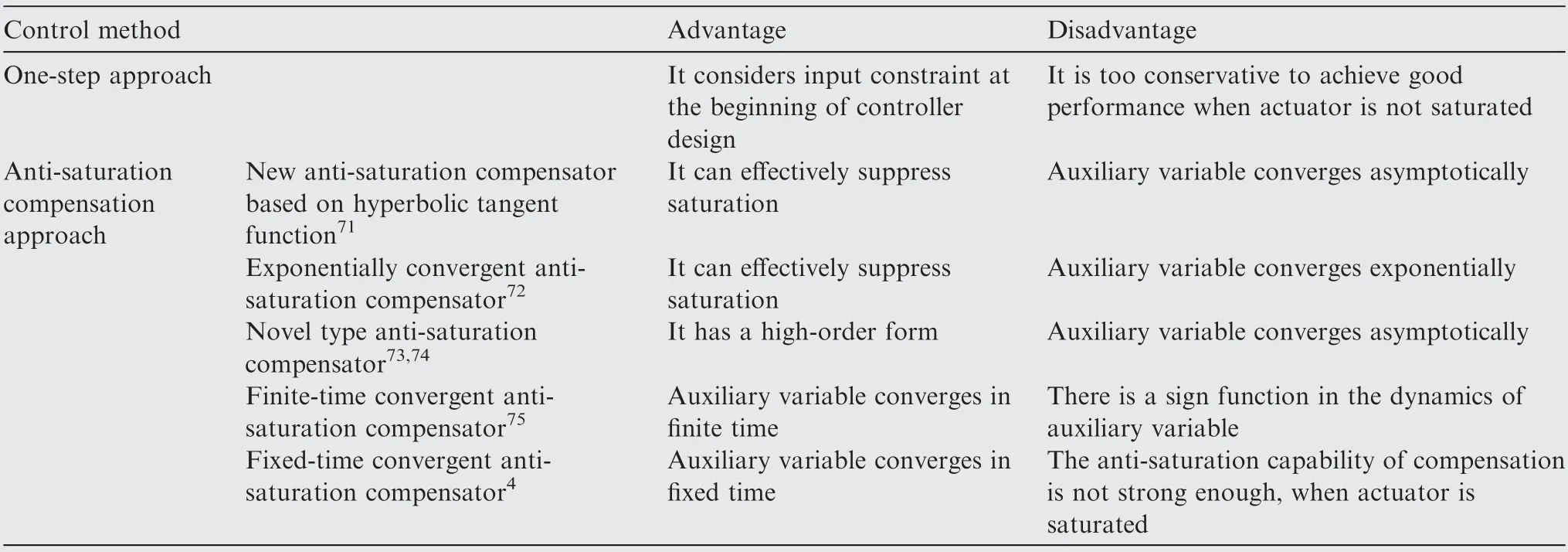
Table 5 Comparison of different anti-saturation control methods.
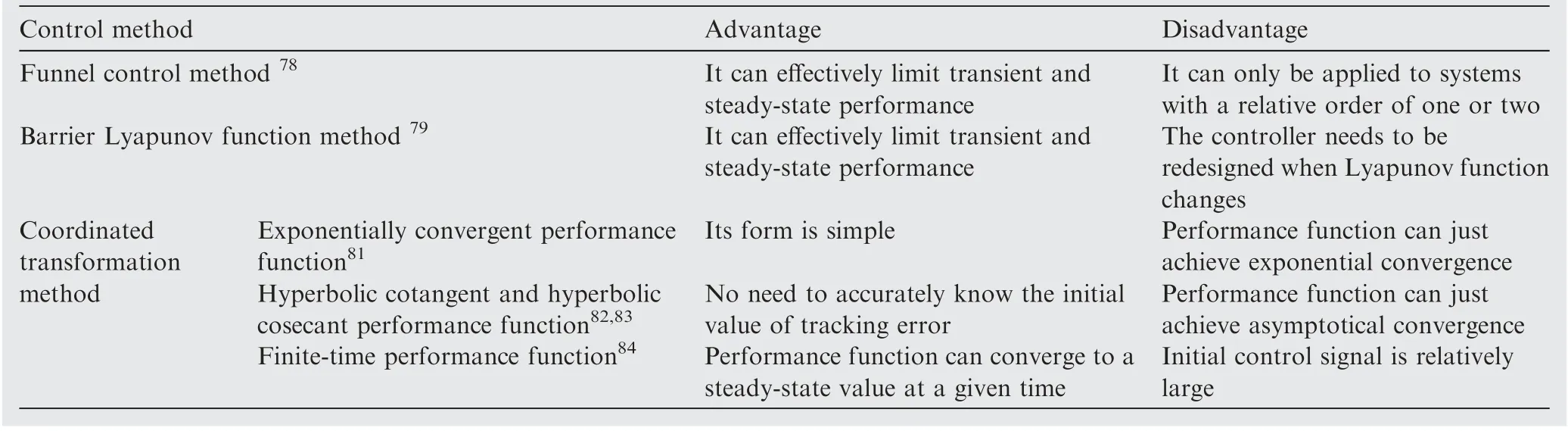
Table 6 Comparison of different prescribed performance control methods.
4. Guidance technology of hypersonic vehicle
With the increasing complexity of battlefield environment, the combat requirements and the diversification of seeker configuration bring some special limitations to the guidance of AHV.In order to accomplish a specific flight mission, it is necessary to consider the influences of these constraints when studying guidance laws of AHV. The constraints mainly include angle constraints, velocity constraints, acceleration constraints and time constraints. In recent years, researchers have done extensive research on guidance laws under special constraints and made important achievements.
4.1. Guidance law with angle constraint
In order to obtain a better strike effect,AHV is required to hit the target at a certain angle to give full play to the effectiveness of warhead.Therefore,it is necessary to consider the case with terminal angle constraint when designing guidance law for AHV.
The guidance law with terminal angle constraint has been studied by many researchers for more than 40 years. Kim and Grider fully considerd the issue of terminal angle constraint when studying the guidance of maneuvering warheads.A suboptimal terminal guidance law is proposed for the first time,which can satisfy the constraints of miss distance and terminal angle.In the design of guidance law with terminal angle constraints, the most used are optimal control and sliding mode control method. Between them, the most widely studied is the optimal guidance law method, whose idea is to transform the design problem of terminal guidance law with terminal angle constraint into an optimal control problem,and obtain an explicit guidance equation after reasonable assumption and simplification.On this basis, by adding other conditions such as angular velocity constraint, acceleration change rate constraint,and minimum energy consumption constraint, the quasi-optimal guidance law method has a new breakthrough.The optimal guidance law method can establish the mathematical model according to different constraint conditions. However, due to the influence of external disturbance, measurement error and high maneuverability of target in the flight process of AHV, there will be a large error in the mathematical model,which can greatly reduce the guidance accuracy. Due to the invariance of sliding mode control to parameter perturbation and the robustness to external disturbances, the guidance laws based on sliding mode control have been developed rapidly. The idea of sliding mode guidance is to make AHV reach the sliding mode plane when it intersects with target by selecting a reasonable sliding mode surface switch item.
Combining the optimal guidance method and sliding mode guidance method,Hu et al.designed a composite guidance law for reentry maneuverable warheads with terminal angle constraints.This guidance law introduces sliding guidance on the basis of optimal guidance law, which enhances the robustness of the guidance law, reduces the chattering and energy consumption. Li and Qian designed a three-dimensional guidance law by using integral sliding mode control and adaptive control, which considers maneuvering target, impact angle constraint and input saturation of hypersonic vehicle.In Ref. 95, a barrier function-based adaptive multivariable twisting controller was designed to obtain guidance law, in which nonlinear/coupled dynamics and terminal angle constraints are considered simultaneously.Lin et al.investigated an adaptive robust guidance law based on integral Lyapunov control algorithm in the presence of impact angle constraint,input saturation, autopilot lag, and external disturbances.Li et al.combined sliding mode control, wavelet neural networks with adaptive network-based fuzzy inference system to design a composite guidance law, which weakened the high-frequency chattering problem of sliding mode guidance and enables the system to obtain high guidance accuracy in the presence of disturbance.The advantages and disadvantages of theabove-mentioned guidance laws with angle constraint are compared in Table 7.

Table 7 Comparison of different guidance laws with angle constraint.
4.2. Guidance law with velocity constraint
When designing a guidance law for hypersonic vehicle, it is often necessary to consider its terminal velocity constraints.For the manned or cargo hypersonic vehicle, it often needs to decelerate at the end to achieve a smooth landing. For attacking hypersonic vehicle, it is usually desirable to obtain a higher speed at the terminal to increase the damage to target.In the design of terminal guidance law,the problem of terminal velocity control is still in the exploration stage.
Ebrahimi et al. combine with sliding mode control theory to design a robust optimal guidance law which satisfies the miss distance and terminal velocity constraints.The simulation results show that the optimal sliding mode guidance law is superior to the pure optimal guidance law in the aspect of constraint satisfaction.In Ref. 99, a generalized polynomial guidance was proposed to control the terminal velocity and flight path angle for tactical hypersonic vehicle. Tahk et al.applied an efficient prediction method to calculate the terminal velocity and its sensitivity in terms of the bias term of the guidance law in Ref. 100. Then, an augmented polynomial guidance law is presented to control the terminal velocity of unpowered aerial vehicles. In order to realize precise strike,Wang et al. proposed a guidance strategy for hypersonic gliding reentry vehicle with impact angle and impact velocity constraints. A weight coefficient of the angle control command is adjusted according to vertical field-of-view deviation so as to maintain the field-of-view constraint. Finally, predictor–corrector method is applied to meet the deceleration requirements,with the deceleration angle of attack and the additional angle of attack selected as control variables.In Ref. 102, Wang et al. proposed an online entry trajectory planning algorithm satisfying terminal full states constraints, path constraints and multiple geographic constraints. An optimal guidance law is designed in terminal phase to implement the full states constraints, through which the terminal velocity direction is constrained strictly rather than kept around the line-of-sight angle.
The guidance method with simultaneous constraints of terminal angle and velocity is an important direction for the research of precision guidance technology. However, this emerging direction is still in the exploratory stage, and there are still many theoretical methods and engineering applications which need to be studied in depth.Xie and Wang studied the guidance law method of reentry vehicle under the constraints of terminal angle and velocity,and designs the optimal guidance law method.Later, Xie and Wang designed an adaptive proportional guidance law to guide the hypersonic vehicle in reentry stage, which can also meet the constraints of terminal angle and velocity.
The above guidance law methods with simultaneous constraints on terminal angle and speed are divided into two types:non-optimal control methods and optimal control methods.Non-optimal control methods are mainly based on proportional guidance law method by adding a bias item to meet multiple constraints such as miss distance,angle,and velocity.The optimal control method is mainly to find the optimal solution by minimizing performance indicators, which can satisfy multi-terminal constraints and has high guidance accuracy under the condition of accurate model. However, in the presence of various uncertainties and disturbances, the guidance precision of optimal control method will be greatly reduced.The bias proportional guidance law method is improved based on proportional guidance law to improve the guidance performance. According to the conclusions obtained in Refs. 105,106, the guidance effect of bias proportional guidance law is better for stationary or uniformly moving targets,but the guidance performance for high-speed and large maneuvering targets is not good, so the scope of application of this method is limited.Due to the strong robustness and stability of sliding mode control against disturbance,it is gradually applied to the research of guidance law with angle and velocity constraints.However,the above-mentioned guidance law based on optimal control theory or sliding mode control theory can only satisfy the terminal velocity constraints in an ideal situation,but does not consider the situation of large maneuvering targets and the dynamic characteristics of vehicle. So, there is a certain gap with the actual engineering application. Therefore, the design of robust guidance law considering the dynamic characteristics of autopilot for large maneuvering targets is a developing trend of future research on guidance law with terminal velocity constraint.
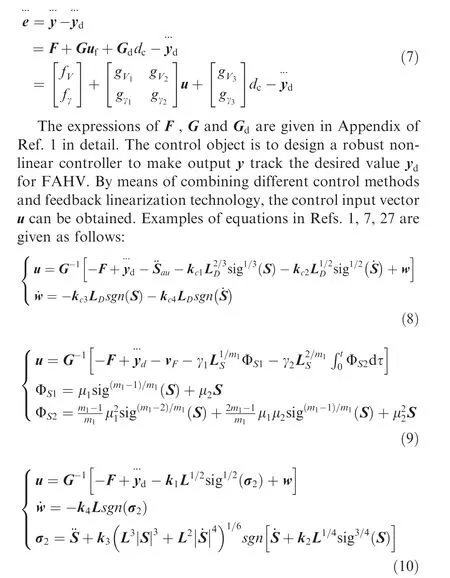
The generic equations with regard to different guidance schemes are provided as below. Firstly, generic equation of non-optimal control method is:

in which zand zare zero miss distance and zero rate error,respectively. tis impact time. η is a positive parameter. After designing sliding surface, the reaching law should be designed to ensure the convergence of the sliding mode variable. Commonly used reaching laws mainly include:constant rate reaching law,exponential reaching law and power rate reaching law,etc.
The advantages and disadvantage of the above-mentioned guidance laws with velocity constraint are compared in Table 8.
4.3. Guidance law with acceleration constraint
In the design of guidance law with constraints of miss distance and terminal angle,there is a large overload required at the hit point,which brings some pressure to the terminal angle control and may cause the missile to miss.In practical application,the acceleration of guided weapon is limited by dynamics.Therefore, making the guidance signal zero near the hit point can reduce the saturation of guidance command and improve the terminal guidance performance of guided weapon. This constraint has a good effect on ensuring that the aircraft can maintain the control system on the controllable edge, so as to save more energy to deal with other uncertain disturbances.Zero terminal normal acceleration is the requirement to improve the power of missile. Therefore, taking the normal acceleration command equal to zero at the terminal time as another constraint besides the constraints of miss distance and angle can enhance the destruction effect on target and improve the terminal guidance performance of hypersonic vehicle.
Ohlmeyer designs a Generalized Vector Explicit Guidance law(GVEG),which can simultaneously meet the requirements of miss distance, terminal angle and terminal acceleration.Ryoo et al. establish an Optimal Guidance Law (OGL) with time estimation, which satisfies the constraints of terminal angle and acceleration, and the guidance law is suitable for first-order lag systems.Based on Ryoo’s research, Lee et al. design a Time-to-go Polynomial Guidance (TPG) that satisfies terminal angle and acceleration constraints for stationary or slow-moving targets.The TPG assumes the guidance command as a polynomial function of time-to-go and determines the coefficients of guidance command to satisfy the specified terminal constraints. Meanwhile, a time-to-go estimation method is discussed for implementing TPG. The TPG proposed is applicable to lag-free and first-order lag systems. In Ref. 110, a Generalized Optimal Impact-angle-control Guidance Law (GOIGL) with terminal acceleration response constraint was proposed. The inheritance relationship between GOIGL and the conventional optimal guidance law with impact angle constraint is studied. It is demonstrated from results of simulation that the GOIGL is superior to conventional bias proportional guidance law in the aspect of acceleration response,miss distance,and terminal impact angle error.In Ref.111,a practical homing guidance scheme was proposed in order to meet the impact angle and terminal acceleration constraints. The guidance problem is formulated as an appropriate biased term which generates a non-diverging time-to-go polynomial homing trajectory for given terminal constraints.The form of the resultant guidance law is similar to conventional guidance laws but its feedback gains vary with timeto-go.
Finally, the guidance effects of the above-mentioned three guidance laws (GVEG, OGL, and TPG) were compared in Ref. 105,112. It is concluded that they can all meet the constraints of miss distance, terminal angle and acceleration.The guidance signal of TPG reaches the maximum value at the initial moment, which is more in line with the demand of practical application. GVEG has the shortest guidance time and can achieve a fast strike to target. However, it ignores the uncertainty of target information. Moreover, this method requires accurate time estimation and is only suitable for attacking fixed or slow-moving targets. For the guidance law without considering the dynamic characteristics of autopilot,the guidance precision will be greatly reduced when the dynamic characteristics of autopilot exist in practice. If the dynamic characteristics of autopilot are fully considered in the design of guidance law, the maneuverability of the guided weapon will be given full play and the precision of attacking target will be improved.Therefore,in the research of guidance law with acceleration constraint, how to fully consider the dynamic characteristics of autopilot is a key technical problem to achieve engineering practice application. The advantages and disadvantage of the above-mentioned guidance laws with acceleration constraint are compared in Table 9.
4.4. Guidance law with time constraint
In order to destroy the defense system of opponent and achieve more efficient attack, the hypersonic vehicle can control the impact time by adopting guidance laws with impact time constraint,so that multiple missiles can be launched from different positions and hit the target at the same time to perform a saturation attack.
An important indicator in the homing guidance of multiple missiles is flight time,which is of great significance to the time coordinated guidance of multiple missiles.The research on flight time mainly focuses on the minimum time homing guidance,accurate flight time estimation,homing technology without time estimation etc.Jeon studied the guidance law method with impact time constraint, and combines the proportionalguidance law with the impact time feedback error to construct a two-dimensional Impact Time Constraint Guidance law(ITCG).Since ITCG is derived based on linearization,when the terminal attack angle is large, its guidance accuracy is poor. Lee et al. designed a guidance law which could control attack time and trajectory deflection angle based on the previous research. The guidance law is composed of two feedback loops,one of which is used to achieve the trajectory deflection angle,and the other loop is used to control the impact time.Finally,the optimal guidance law is solved by Pontryagin maximum principle, and the guidance law which can simultaneously constrain the arrival time is obtained. The above designs are all limited to a two-dimensional plane and are carried out under the condition of linearizing the missile kinematics equations,which cannot carry out the accurate guidance of missile in three-dimensional space.

Table 8 Comparison of different guidance laws with velocity constraint.

Table 9 Comparison of different guidance laws with acceleration constraint.
Hull et al.designed two estimation algorithms for the timeto-go of linear quadratic optimal guidance trajectory.The first algorithm assumes that the missile velocity is constant, taking the minimum normal acceleration and the shortest final arrival time as indicators. Then, the remaining arrival time is solved by Pontryagin maximum principle. The second algorithm is the same as the first one,but the index is changed to the shortest arrival time under the specified overload.Tahk et al.estimates the remaining arrival time of missile by regression method.This method has a small amount of calculation,which is different from the conventional iterative method. In addition, the estimation error of the time-to-go caused by nonzero initial yaw angle is compensated in regression calculation.Thus, when missile velocity is time-varying, this method is more accurate to estimate the remaining flight time of the optimal guidance law.Lam derived the remaining arrival time in analytical form for the Real True Proportional Guidance law(RTPN).The numerical solution of this method is very accurate, but when polynomial is used instead of integral calculation, there will be a certain error. Moreover, this estimation method is limited to the vehicle guided by RTPN. Jung and Kim only considered the projection of the relative velocity in vertical plane of the line of sight, and solves the remaining arrival time of missile in combination with relative distance.In order to realize the constraints of impact angle and time,the piecewise control strategy is adopted. First, the missile is guided to the specified position through an angle constraint guidance law, and then the time constraint guidance is carried out. This strategy of guidance can make missile reach target according to the specified trajectory angle and time, but the accuracy is not high.In Ref.121,a guidance law was presented based on sliding mode control to satisfy the field-of-view,impact angle and time constraints. Desired look angle is designed as a function of a gain which determines the length of the remaining trajectory. Therefore, the impact time can be controlled by adjusting the gain. Tahk proposed guidance law for homing missile to satisfy the impact-time constraints.The scheme can be applied to any existing guidance law for which a formula of predicted time-to-go is available.Hu et al. propose a terminal sliding-mode technique to obtain a finite-time convergent guidance law against nonmaneuvering target.Then, it is combined with the inertialdelay control to derive an ultimately bounded guidance law against maneuvering target. Neither of the two guidance laws involve the error-prone estimates of time-to-go and predictive interception point.Therefore,the reliability of these two meth-ods is higher. The advantages and disadvantage of the abovementioned guidance laws with time constraint are compared in Table 10.
Table 10 Comparison of different guidance laws with time constraint.
5. Potential future research
With regard to control methods considering the influence of external disturbance, Ref. 27 designed adaptive higher-order super-twisting algorithm. Its control signal is continuous and it can be applied to higher-order systems. However, tracking error of it can just achieve finite-time convergence to a small region around zero. Therefore, it is necessary to study how to ensure the robustness and high-precision finite-time convergence of hypersonic vehicle against disturbances, while effectively suppressing chattering. With regard to fault-tolerant control,the existing methods only have partial fixed-time convergent characteristics. Therefore, how to ensure that the tracking errors of AHV affected by actuator faults achieve non-singular fixed-time convergence is an important research topic.With regard to anti-saturation control,the existing compensators can hardly ensure that the auxiliary variables achieve quick and accurate convergence after actuator exits saturated region, which will affect convergent characteristics of the original nominal controller. Meanwhile, the antisaturation capability of compensation needs to be improved adaptively according to different flight conditions.Therefore, it is necessary to propose a new compensator which has both high-efficiency anti-saturation capability and highprecision convergent characteristics.With regard to prescribed performance control, the existing performance function can freely adjust the convergent rate of function, but the price to be paid to achieve a faster convergent rate is a larger initial control signal, which is usually difficult to achieve in AHV with limited control amplitude. Therefore, it is necessary to present a new type of performance function which can freely adjust the convergent rate and has a small initial control signal.
Most of the existing control methods only consider a single control constraint or combine two control constraints.In practical engineering applications,attention should be paid to consider the above-mentioned control constraints at the same time. It is necessary to improve the AHV’s robustness against external disturbances,fault tolerance against actuator failures,saturation suppression capacity, and consider the transient performance of tracking errors to ensure the intake constraint of air-breathing scramjet.Novel controllers which can simultaneously deal with external disturbances,actuator failures,limited control input and engine intake constraints should be studied to meet the control requirements of AHV under multiple constraints, and should be more suitable for practical engineering use.
With regard to guidance methods subject to special limitations, mainstream methods can be divided into several types:non-optimal control methods, optimal control methods, sliding mode control methods and methods combining optimal guidance and sliding mode guidance. The guidance effect of non-optimal control methods is better for stationary or uniformly moving targets. However, the guidance performance of them for high-speed and large maneuvering targets is not good, so the scope of application of this method is limited.The optimal control methods can satisfy multi-terminal constraints and have high guidance accuracy under the condition of accurate model. However, the guidance precision of them will be greatly reduced in the presence of uncertainties and disturbances.Sliding mode control methods are robust to parameter perturbations and external disturbances, but there will be chattering problem in guidance signals. The methods combining optimal guidance and sliding mode guidance can enhance the robustness and meanwhile reduce chattering and energy consumption. However, they do not consider the dynamic characteristics of autopilot.With regard to guidance laws with time constraint, the research on flight time mainly focuses on the minimum time homing guidance, accurate flight time estimation and homing technology without time estimation, in which the homing technology without time estimation is more preferred. The reliability of homing technology without time estimation is higher because they do not involve the errorprone estimates of time-to-go and predictive interception point.
Similar to the summary of control methods, most of the existing guidance methods only consider a single or two terminal constraints. Therefore, the design of advanced guidance law which is robust to disturbances and considers the dynamic characteristics of autopilot for large maneuvering targets is a developing trend of future research on AHV. Advanced guidance law should be able to deal with multiple constraints,including angle constraint, velocity constraint, acceleration constraint and time constraint.
6. Conclusions
(1) The development status of hypersonic vehicles in different countries is introduced, and hypersonic vehicles are classified as: space orbital maneuvering vehicle (aerospace aircraft), gliding reentry vehicle, and AHV.
(2) The geometry and flight missile profile of a typical AHV are introduced.
(3) The different control methods and their classification of AHV under the influence of external disturbances,actuator faults, saturation and transient performance limitation are reviewed, respectively. The development trends of each method are introduced, which are finite-time strong robust sliding mode control, fixedtime convergent passive fault-tolerant control, highprecision anti-saturation compensation approach and coordinated transformation prescribed performance control.
(4) The requirements of terminal guidance law for hypersonic vehicle in complex battlefield environment are summarized, including angle constraint, velocity constraint, acceleration constraint and time constraint.The different design methods of guidance laws with various constraints are introduced. Meanwhile, their respective advantages, disadvantages, and future development trends are analyzed.
The authors declare that they have no known competing financial interests or personal relationships that could have appeared to influence the work reported in this paper.
This study was co-supported by the National Natural Science Foundation of China(No.12102343),the Key Program of the National Natural Science Foundation of China (No.U2013206), Shanghai Space Science and Technology Innovation Fund, China (No. SAST2020-072) and the Fundamental Research Funds for the Central Universities, China (No.D5000210833).
 Chinese Journal of Aeronautics2022年7期
Chinese Journal of Aeronautics2022年7期
- Chinese Journal of Aeronautics的其它文章
- An online data driven actor-critic-disturbance guidance law for missile-target interception with input constraints
- Study on excitation force characteristics in a coupled shaker-structure system considering structure modes coupling
- Smooth free-cycle dynamic soaring in unspecified shear wind via quadratic programming
- Active and passive compliant force control of ultrasonic surface rolling process on a curved surface
- High dynamic output feedback robust control of hydraulic flight motion simulator using a novel cascaded extended state observer
- Composite impact vector control based on Apollo descent guidance