
永磁同步电机无传感器控制算法切换研究
2022-07-28 08:59廖三晟罗马吉
微电机 2022年6期
廖三晟,罗马吉
(1.武汉理工大学 现代汽车零部件技术湖北省重点实验室,武汉 430070;2.武汉理工大学 汽车工程学院,武汉 430070)
0 引 言
永磁同步电机(PMSM)以其效率高、调速范围宽、动态响应快并且结构简单等优势,近年来被广泛运用于各个工业领域[1]。传统的永磁同步电机控制需要通过传感器获取电机转子的相关信息,但是这样做的问题是给系统增加了重量和体积,使控制系统成本上升,并且传感器容易在高温、高湿等一些恶劣环境出现偏差,降低了控制系统的稳定性[2]。而永磁同步电机无传感器控制的出现很好地改善了使用传感器的弊端。因此,先进的、高性能的无传感器控制技术引起专家学者的广泛关注[3]。
PMSM无传感器控制策略往往在不同速域会采用不同的控制策略。在起动低速时,常常使用高频注入的方式获取转子的位置信息。这种方法利用电机内部直轴和交轴电感不相等产生的凸极效应获取转子位置信息,并且这种方法与电机的转速以及大部分参数无关,具有较强的鲁棒性[4]。但是这种策略实现起来较为复杂,对硬件有着较高的要求。因此,在一些泵类、压缩机等要求不高的场合,往往会考虑使用恒电压变频(V/F)和恒电流变频(I/F)这类开环起动方法。这类方法有着较好的控制精度,并且容易实现、节约成本。而在中高速域的位置估算策略中往往是基于永磁同步电机的基波模型进行估计[5],因此,在低速时一般不适用。常用的有反电动势积分法、模型自适应法(MRAS)、扩展卡尔曼滤波算法(EKF)、滑模观测器(SMO)等[5-6]。反电动势积分法和MRAS计算都相对简单,响应快速,但是都比较依赖准确的电机模型和电机参数。EKF有很强的动态和抗干扰性能,但是EKF计算量大,对硬件要求很高,因此在应用上受限[6]。SMO对电机控制系统的模型及电机参数的精度要求不高,能适应一定范围内的外部干扰和运行过程中电机参数的变化,并且具有系统较简单鲁棒性较高等优点,因此是无传感器控制算法中的一个很好的选择。 但是SMO也存在着抖振,相位延迟等问题。为了更好的解决这些问题,研究者提出光滑连续的饱和函数代替符号函数减少高频振动,用锁相环代替传统的反正切函数大大的提升了位置估计精度[7]。此外,这些算法的选择固然重要,算法间的切换更是一个重中之重的问题,这些高低速域算法的平滑切换是整个系统能平稳运行的前提,切换策略参数使用不当会使电机转速和电流冲击造成电机失步,甚至损坏电机[8-9]。
本文低速域以I/F控制作为起动策略,高速域以最大转矩电流比(MTPA)和弱磁控制相结合的方式运行,采用SMO估算转子位置及速度信息,并且对传统的SMO做改进得到更好的估算精度。然后提出一种电机d,q轴电流同时调整的策略,使开环运行能快速的、无冲击的转入高速域的运行范围。最终通过Matlab/Simulink仿真检测全速域运行的稳定性。
1 低速域控制策略分析
I/F起动属于电流闭环、速度开环的一种起动方式,根据电机的负载情况给定电流幅值和合适的旋转频率,其中电流矢量的加速度可以通过旋转频率曲线间接得到。电流幅值在运行过程中受到期望值的反馈,因此不会出现过流的情况,且在一定负载范围内,具有“转矩-功角自平衡”的特性[10]。I/F控制结构框图如图1所示。

图1 I/F控制结构框图
建立如图2的运动坐标系,其中dq坐标系为实际的转子坐标系,坐标系d*q*为给定的参考坐标系。电机起动前,使参考d*q*轴系落后dq系90°,这样转子更容易被拖入同步旋转。当电机开始加速运转时,此时q轴电流为
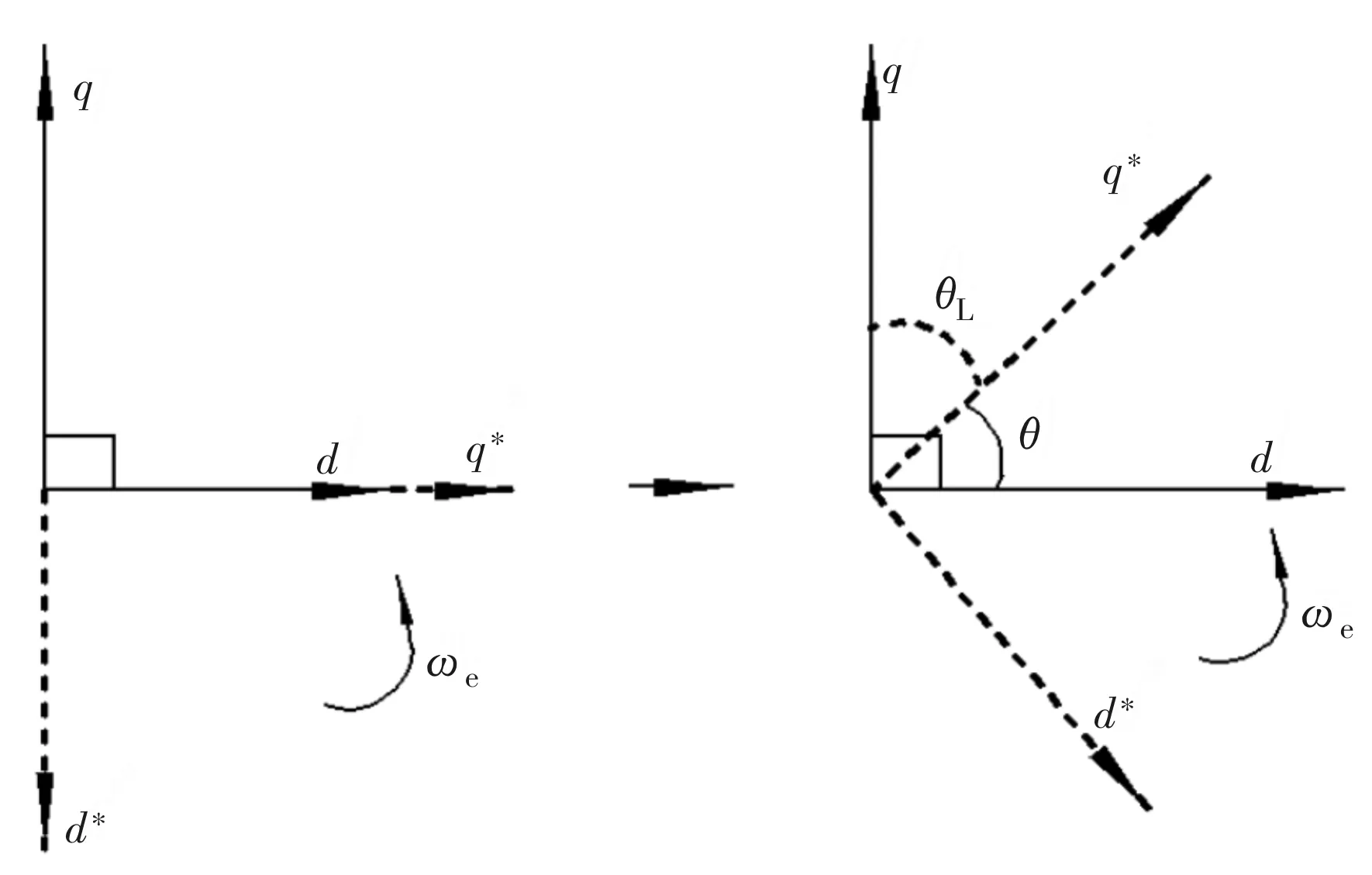
图2 I/F旋转坐标系
(1)
此时的转矩和运动方程分别为
(2)
(3)
式中,p为电机极对数,γ为磁链值,Kt为常数,Te为电机的电磁转矩,TL为负载转矩,J为电机的转动惯量,θL为电机运行时两坐标系的夹角,它与电机的负载和加速度有关,负载和加速度越大,θL就越小,反之,θL增大。负载和加速度的变化使θL自动调整,从而使电机功角θ也随之变化,这就是I/F控制的“转矩-功角自平衡”特性。
(4)
2 高速域控制策略分析
2.1 MTPA与弱磁控制
内置式永磁同步电机由于直轴与交轴的电感大小不相等,存在磁阻转矩。因此在基速范围内,一般采用MTPA控制代替id=0控制,使电机在相同的电流幅值下能产生更大的电磁转矩,提高电机输出能力。首先定子电流is可以分解到两相旋转坐标系下:
(5)
式中,id、iq分别为d轴和q轴定子电流分量,θe为转子实际位置角。
联立求解式(2)和式(5)得:
(6)
采用MTPA控制时应满足:
(7)
联立求解式(6)和式(7)得:
(8)
MTPA运行的轨迹如图3所示。

图3 MTPA轨迹图
当电机转速超过基速后,若不对电机进行弱磁控制,电机的调速能力将变得非常弱,并且转矩输出能力迅速降低[11],无法达到控制要求。所以应该对电机进行弱磁控制,具体的弱磁运行规划轨迹如图4所示。其中OB段为MTPA运行阶段,当电机从O点运行到B点以后,电机将沿着虚线BC段运行,此时电机沿着恒转矩曲线Te1进行弱磁,弱磁过程中直轴电流轨迹不断沿坐标系负向移动,电流绝对值不断增大。当达到C点时,此时运行轨迹已经和电流极限圆相交,定子电流无法继续增大,所以电机将沿着CD 段圆弧运行,由于此时定子总电流不变,所以交轴电流在不断减小,以达到继续弱磁的目的。
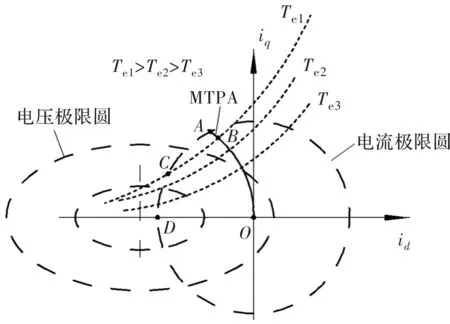
图4 弱磁运行轨迹
2.2 改进的滑模观测器
滑模观测器是用于系统非线性参数估计的一种方法。传统的滑模观测器通过PMSM的电压方程构造切换面,使符号函数在滑模面上不断变换,使系统沿着设定的运动轨迹变化,保证系统收敛。PMSM电压方程在两相静止坐标系下可表示为
(9)
式中,R为电阻,L为定子电感,iα和iβ,为两相静止坐标系下的电流分量uα和uβ为两相静止坐标系的电压值,Eα和Eβ为静止坐标系下的反电动势值。
根据式(9),可以构建滑模观测器为
(10)
将式(10)和式(9)做差可以得到:
(11)

(12)
系统的动态品质及稳定性与控制函数和滑模增益k关系密切,传统的滑模观测器是取符号函数为控制函数,这样即使经过低通滤波器以后,很小的误差仍然会产生很高的反馈,使系统产生高频抖振。对此,可以采用初等饱和函数作为控制函数,从而有效的降低抖振。设计自适应低通滤波器滤除反电动势输出中的高频信号,另外,由于反正切函数在估算过程中易于出现除零的情况,并且固定的角度补偿难以满足转速变化范围很大的需求,从而放大误差的情况,所以采用锁相环(PLL)来更准确的估计转子位置。高速域的控制结构框图如图5所示。

图5 高速域控制结构框图
3 算法切换策略分析
由于PMSM无传感器控制在高低速域采用不同的算法策略,如果直接切换,将会造成电机转速波动,电流冲击,甚至直接失步。因此需要设计一个合适的切换过渡过程。传统的方案是在一定的转速范围内,通过一个加权系数去调整参考坐标系和转子坐标系的夹角θL,直到d*q*轴系逼近dq轴系完成切换,这种做法的缺点是需要反复调试位置角变化的加权系数,并且对于不同工况时也需要做反复调整[12]。文献[13]提出了一种基于电流幅值变化的过渡方案,在控制算法切换过程中不断减小q轴电流幅值,如图6所示,为了维持新的平衡,θL角会自动减小并逐渐趋于0,使两坐标系重合,完成切换。这种过渡方案不取决于人为制定的变化,适应各种负载工况。但是在电机轻载或者空载时会出现切换时间长,切换比较困难的情况[5]。
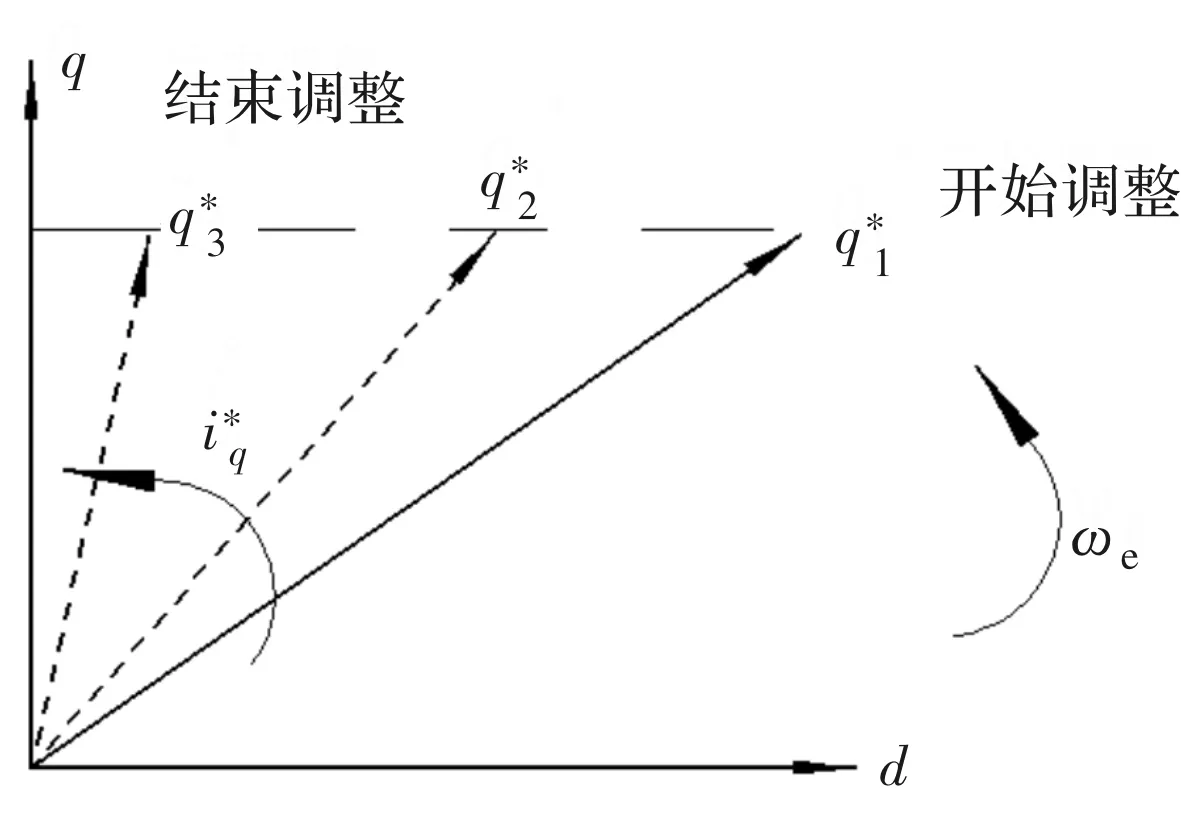
图6 基于q轴电流幅值变化的切换过程

(13)
式中,t0为切换开始时刻,kq为q轴电流递减斜率,C为常数。
4 仿真及结果分析
使用Matlab/Simulink建立仿真模型, SVPWM的开关频率设置为10 kHz,仿真运行步长设置为10-5s,q轴电流递减斜率设置为2,切换临界条件θL取0.01 rad。永磁同步电机相关参数如表1所示。

表1 PMSM参数
电机最大的调速范围应该达到9000 r/min,取转速800 r/min作为低速域和高速域的分界,按照给定的转速曲线运转,设置t=2 s作为算法过渡开始时刻。在额定负载下,分别对只调节q轴电流幅值和同时调节d,q轴电流两种方案进行仿真分析,同时设置切换标志位,以观察切换过程,当标志位从0变成1时即为完成切换。其结果如图7图10所示。
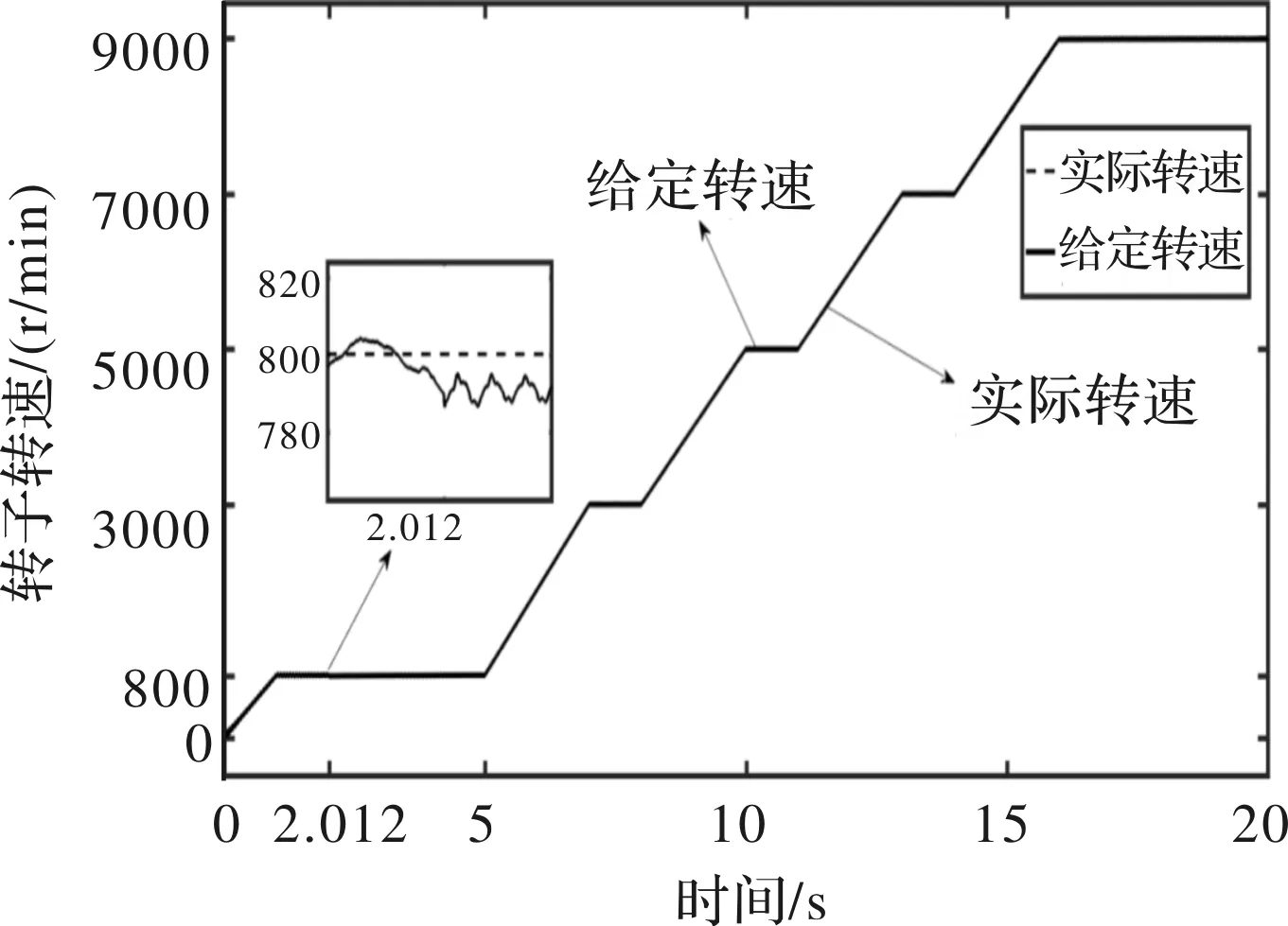
图8 改进切换策略转子转速曲线

图9 切换标志位

图10 转速误差曲线
由图7图10可以看出使用两种切换策略都可以使系统成功的完成切换,电机没有出现大的转速波动,但是同时调整d,q轴电流的切换策略过渡过程在t=2.012 s时完成切换,而只调整q轴电流在t=2.88 s时完成切换。此外,同时调整d,q轴电流在切换时转速误差更小。所以由仿真结果可以看出采用d,q轴电流同时调整的策略相比传统方案切换转速波动更小,切换过渡过程更短。
高速域以MTPA和弱磁控制相结合的方式运行,使用改进的滑模观测器估算转子位置等信息。仿真结果如图11和图12所示,从仿真结果可以看出转子位置估计精确,估计的电角度误差不超过1°,基速内的转速估算波动不超过15 r/min,基速到弱磁最高转速范围内的估算转速波动不超过40 r/min。

图11 改进SMO角度估算误差曲线

图12 改进SMO转速估算误差曲线
5 结 语
本文针对永磁同步电机无传感器控制不同算法之间的切换策略,分析了高低速域的控制方法,对传统的滑模观测器做出改进,并且在现有的只调整q轴电流完成切换的策略下,提出一种d,q轴电流同时变化,使I/F开环控制快速,无冲击的进入MTPA运转阶段。相比传统方案,这种策略使切换过渡时间大大缩短,从而提高了电机的效率。最后通过仿真验证了该方案的可行性。
猜你喜欢
防爆电机(2022年4期)2022-08-17
火力与指挥控制(2022年6期)2022-07-25
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
大电机技术(2022年2期)2022-06-05
科学技术创新(2021年35期)2022-01-14
计算机仿真(2021年3期)2021-11-17
建材发展导向(2021年14期)2021-08-23
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
