不同光照不同偏置率碰撞场景的AEB 系统测试与评价
2022-07-17 07:42牛成勇吴昆伦周祥祥苏占领
汽车安全与节能学报 2022年2期
牛成勇,吴昆伦,周祥祥,苏占领,胡 雄
(1.国家智能网联汽车质量检验检测中心(重庆),重庆 401329,中国;2.汽车主动安全测试技术重庆市工业和信息化重点实验室,重庆 401329,中国;3.自动驾驶系统及智能网联汽车技术研发与测试应用重庆市工程研究中心,重庆 401329,中国)
汽车自动紧急制动系统(autonomous emergency braking system, AEB)通过先进车载环境感知传感器(单目、双目、多目摄像头等视觉传感器或毫米波雷达、激光雷达等)实时监测周围环境及自车行驶状态,根据算法判断与目标之间的距离、方位及相对速度等,当系统探测到前方区域存在潜在碰撞危险时,及时对驾驶员进行提醒、警告并采取制动措施以避免或减轻碰撞程度[1]。根据欧盟新车评价规程(European new car assessment programme,Euro-NCAP)调查研究表明,AEB 系统可有效避免27%的碰撞事故[2-4]。
随着国内外新车评鉴协会的AEB 评价规程不断丰富、严苛以及交通行业标准《营运客车安全技术条件》(JT/T 1094-2016)、《营运车辆自动紧急制动系统性能要求和测试规程》(JT/T 1242-2019)和国家推荐性标准《乘用车自动紧急制动系统(AEBS)性能要求及试验方法》(GB/T 39901-2021)的贯彻落实,不同传感器方案的AEB 系统已广泛应用于乘用车、营运车辆上[5]。结合实际行驶环境及相关事故数据统计分析发现,本车与前方目标以一定的偏置率行驶及天气环境变化(如,车辆进入隧道时产生的“黑洞效应”所造成的感知系统短暂“失明”)等情况经常出现,其对AEB 感知系统的识别及后续的系统控制执行操作造成了极大的影响。然而,目前国内外标准法规中,尚未有基于不同偏置率场景的AEB 系统深度测评(光照条件变化、目标物差异),只是局限于基础场景的测试,不能有效评价系统的性能好坏及不同系统供应商产品的优劣性。
鉴于此,本文基于AEB 系统在不同测试目标物、不同光照条件下的偏置率场景测试,分析不同偏置率场景对系统的预警时机、制动效能、执行策略等要素的影响,是极具现实意义的,能够为相关汽车主机厂及系统供应商进一步提升系统安全性与稳定性提供数据支撑与技术参考。
1 AEB 系统工作原理及测试评价方法
1.1 AEB 系统工作原理
简而言之,AEB 系统首先通过车载环境感知机构实时探测并快速获取前方目标信息,然后根据系统控制策略判断危险等级,最后通过执行机构施加主动制动[6]。其工作原理如图1 其所示。

图1 AEB 系统工作过程
1.1.1 AEB 系统环境感知传感器及影响要素分析
目前,AEB 环境感知传感器的解决方案主要有单目—双目摄像头、毫米波雷达和激光雷达。一般而言,3 种异构传感器各有优缺点,往往需要通过采用多传感器数据融合来充分发挥各传感器优势以提高目标探测准确性、缩短探测及识别时间以及丰富目标识别多样性[6]。然而,无论是单传感器方案,还是多传感器融合方案,在偏置率工况、光照条件变化等因素下,感知系统的识别稳定性、可靠性均受到影响,甚至失效。因此,有必要对AEB 系统环境感知传感器的影响要素作进一步分析。
单目—双目摄像头作为AEB 系统的环境感知机构的解决方案,能够实现对目标属性(行人、动物、车辆等)的有效识别且能获取足够的环境细节。然而,针对单目摄像头而言,其无法保障对不同距离范围内目标的较高精度测距且需要建立丰富的、不断更新、维护和优化的样本数据库(若样本数据库中没有待识别目标的全部特征数据,则单目摄像头无法识别)以保障单目摄像头对目标的识别[7-9]。当本车与目标存在偏置时,有可能造成单目摄像头识别效率降低,甚至会发生因偏置引起的目标特征数据丢失而造成的识别失效;当光照条件(明暗反差、逆光等)发生变化时,单目摄像头会短暂丢失目标,造成无法识别的后果。针对双目摄像头而言,其相较单目摄像头,识别精度提高,但探测距离较近。当与前方目标存在(较大)偏置时,因其自身探测距离受限、探测视角窄的原因,会出现无法提供及时的预警而导致系统制动功能衰减;当遇到光照条件变化时,其出现的问题与单目摄像头类似。
毫米波雷达具有目标探测距离远、目标更新频率高、环境鲁棒性好(尤其是在夜间环境及不良天气下的探测能力较好)等特点,其对目标的探测主要依靠电磁波硬件系统,对目标识别算法的要求较低,占用硬件资源较少[1]。但是,其目标识别能力及周围环境信息获取能力差,一般需融合摄像头以支持较为复杂的交通场景且“毫米波雷达+摄像头”信息融合方案是目前及未来一段时期内的AEB 环境感知解决方案[10-13]。目前,由于毫米波雷达为避免对相邻车道目标的误触发,通常会对本车道外一定区域内的目标作过滤处理,即抑制功能触发,从而导致当本车与目标有一定偏置率,尤其是偏置程度较大时,会存在一定程度的漏识别,从而导致系统无法启动自动制动。
激光雷达(非单线激光雷达)具有较高的角度、距离和速度分辨率,抗有源干扰能力强且具备一定的环境鲁棒性。激光测距方法大体上可分为激光飞行时间(time of fly,TOF)法和三角法。三角法测距,类似于双目视觉测距,其在近距离下,探测精度较高,而在远距离探测时,探测误差会呈几何量级增长;TOF 法是通过获取激光的飞行时间,反推出飞行距离,其探测距离及测距精度均优于三角法测距[14]。值得一提的是,尽管激光雷达具有探测距离远、不受光线影响、视场角大等优势,因其成本高、性价比低,在配置AEB 系统的量产车上,实际应用很少。
1.1.2 AEB 系统控制执行策略
AEB 系统控制策略主要以实现安全性和舒适性为目标[15],因此,在AEB 系统请求制动执行策略设定方面分为2 类:
1) 采用一级制动,即AEB 系统开始制动后直接达到所需的最大减速度值,以保证安全性为前提;
2) 采用二(多)级制动,即AEB 系统开始制动直至车辆停止过程中,AEB 系统提供不同减速度值的二(多)级制动,在保证安全的情况下,充分考虑舒适性的要求,使得系统激活后能更为舒适、平顺地介入[16]。
1.2 AEB 系统测试评价方法
选取白天、夜间2 种光照条件、标准假车、骑自行车人模型2 种测试目标物、50%、75%、100% 3 种偏置率场景,对2 款同类型城市运动型多用途车型(sport utility vehicle,SUV)(分别匹配不同系统供应商的AEB 产品)进行综合性能测试。
当前方目标物为标准假车时,测试场景有2 种:前车静止(car to car stationary,CCRs),前车以20 km/h 的速度缓行(car to car moving,CCRm);当前方目标物为骑自行车人模型时,测试场景为纵向沿道路以15 km/h 的速度骑行(car-to-bicyclist longitudinal adult,CBLA)。详细试验矩阵、试验场景及关键测试设备如表1 和图2 所示。

表1 AEB 系统测试矩阵

图2 AEB 系统测试场景及关键测试设备
在AEB 关键测试设备中,转向控制机器人能实现测试车辆行驶路径的精准控制,保证测试车辆按设定的偏置率进行试验;制动油门组合控制机器人能保证测试车辆速度的稳定,避免传统人工驾驶带来的随机性、重复性差的影响,保证测试结果的一致性。
1.3 测试车辆及AEB 系统信息
2 款同类型城市SUV(车长、轴距及最大总质量相近)所装备的AEB 感知技术方案相同,均采用摄像头+毫米波雷达信息融合方案;系统感知传感器安装位置相同,处于前挡风玻璃中间位置(摄像头)及前进气格栅中部(毫米波雷达)。
2 AEB 测评结果与分析
2.1 前方目标车辆静止(CCRs)测试场景
2.1.1 白间测试
根据表1 所述的测试矩阵要求,在白天天气良好、光照度满足试验要求的环境下,基于3 种不同的偏置率场景(50%、75%、100%),依次进行了2 个速度点(30、50 km/h)的对比测试。
1) 不同偏置率场景对即碰时间(time to collision,TTC)的影响。采用不同系统供应商技术方案的测试车辆A1、A2,在不同偏置率场景下的TTC 响应数据如图3 所示。

图3 2 款试验车辆的TTC 响应数据
分析可知:车辆A1 在正对场景(100%偏置率场景)中的系统功能触发时机要比偏置场景早,且随着偏置程度的增加,TTC 响应时间基本呈现变短的趋势,即触发时机愈晚。测试车辆A2 在低速场景下,偏置率对系统预警时机影响不大,几乎同时触发;而在高速测试场景下,系统预警早晚与偏置率的大小基本呈现正相关性。
因AEB 感知系统对偏置目标的识别难度大于对正对(100%偏置率)目标的识别,导致系统对偏置目标的预警响应时机偏晚。为有效避免对相邻车道目标的误触发,系统通常会对本车道外一定区域内的目标作过滤处理,即抑制功能触发,从而导致系统对偏置目标会存在一定程度的漏识别。
2) 不同偏置率场景对系统制动效能的影响。2 款试验车辆在50 km/h 测试车速点下的制动效能(主要参考参数为制动减速度)曲线数据如图4 所示。

图4 2 款试验车辆的制动减速度
试验结果表明:因目标偏置程度的增加引起预警时机(包括声光报警、预制动点刹形式)滞后,从而导致车辆A1 和A2 的系统主动制动介入时机延后。为避免与前方静止目标的碰撞,随着目标偏置程度的增加,车辆A1 和A2 均表现出更大的峰值制动减速度,即制动效能更大。
3) 系统预警时机和制动执行策略对其制动效能的影响。以测试车辆A1 为例,选取100%碰撞偏置率、2 个测试车速点对比分析,如图5 所示。

图5 100%偏置率、试验A1 的制动减速度
结合图3 所示数据,结果表明:
a) 因测试车速的增加,系统根据避撞控制策略,TTC 响应时间提前,从而使得其制动执行策略不同,即低速时,预警时间相对较晚,采用一级制动,AEB系统开始制动后直接达到其所需的最大减速度;高速时,系统预警时机提前,为兼顾舒适性,采用二级制动,AEB 系统开始制动直至车辆停止过程中,系统会根据算法实时计算车辆与前方目标的相对距离、相对速度(包括横向速度)等信息并在某一时刻决策是否保持或降低制动减速度,整个过程能提供不同制动减速度值的二级制动。
b) 不同的系统制动执行策略导致制动效能不同,即最大制动减速度及在最大制动减速度点的保压时间不同。
综上所述,系统预警时机的早晚以及制动执行策略的差异对其制动效能产生影响。
2.1.2 夜间测试
本夜间测试路段的光源为两侧对称型,光照强度在16~22 lx 范围内,测试车辆不开启近光灯或远光灯。测试车辆A1 和A2 在白天、夜间2 种场景下的TTC响应对比数据如图6 所示。通过数据分析发现:
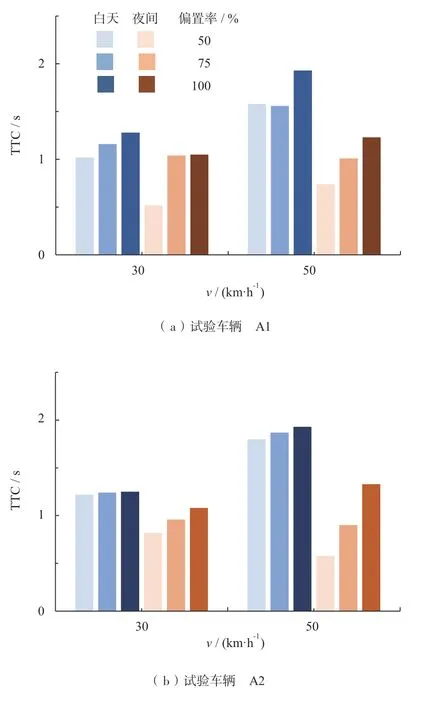
图6 2 款试验车辆的TTC 响应数据
1) 与白天测试环境相比,夜晚场景下,不同偏置率场景对AEB 系统的预警时机的影响程度明显增加,尤其是高速场景,即由于光照条件对感知系统的影响,系统TTC 响应时间因不同偏置率场景而产生明显的差异。
2) 在高速、夜间测试场景下,因摄像头目标感知识别难度增加以及探测距离受限,导致系统预警时机明显变晚,尤其是目标偏置程度较大的测试工况。
通过实测车辆A1 和A2 发现,在夜晚、低速场景下,系统均能避免碰撞。在白天、夜间2 种场景下,2 车制动停止后与目标距离参数如图7 所示。在夜晚、高速场景下,由于系统预警时机较晚,在不同偏置率场景下存在与前方目标物发生碰撞的情况以及因光照条件、偏置率场景引起感知传感器的漏识别,甚至出现误触发。
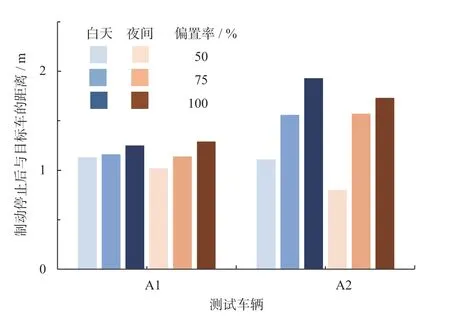
图7 低速场景下试验车辆制动停止后与目标距离
2.2 前方目标车辆缓行(CCRm)测试场景
按照前述测试矩阵要求,在CCRm 测试场景下,试验车辆A1 和A2 分别在白天/夜间、3 种偏置率场景、4 个速度点下进行AEB触发预警时刻TTC的对比测试,如图8 所示。

图8 2 款试验车辆的TTC 响应数据
以试验车辆A1 为例,选取50%和100% 2 种偏置率场景,其在65 km/h 测试速度点下的制动效能(制动减速度)数据如图9 所示。
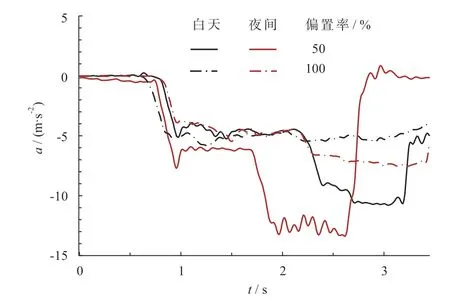
图9 试验车辆A1 在65 km/h 速度点下的制动减速度数据
通过数据分析可知:
a) 在同一光线条件(白天、夜间)、低速测试场景下,不同偏置率场景对系统预警时机影响不大,但影响程度随车速的增加而变大,且夜晚条件下的TTC 明显小于白天测试环境;
b) 随着测试车速的提高,系统预警TTC 随之增大;
c) 由于不同偏置率带来的系统TTC 预警时机的差异,加之白天/夜间光线条件使差异程度进一步放大,为避免与前方目标车辆发生碰撞,随着偏置程度的增加,其制动效能随之增大。
2.3 前方自行车纵向骑行(CBLA)测试场景
因自行车目标移动速度较快且骑行路径随机性大,与行人目标相比,其识别难度较大。在自行车横穿道路时进入摄像头视野较晚,加之毫米波雷达对横向运动目标不敏感,其会对感知传感器的识别造成影响;在纵向骑行时,其尾部轮廓特征(即尾部目标轮廓的高、宽、高宽比、面积等典型轮廓特征)不明显且雷达截面积(radar cross setion)较机动车目标尾部低,很容易出现摄像头或毫米波雷达的漏识别情况。因此,对AEB系统进行自行车场景的测试可较为充分、严苛地考察其对不同目标的识别能力。
本场景中,自行车目标物以15 km/h 的速度纵向骑行,测试车辆以50 km/h 的速度,按照3 种偏置率、2 种光照条件进行追尾测试。测试车辆A1 和A2 的AEB 系统功能表现分别如图10 所示。

图10 2 款试验车辆的TTC 响应数据
通过实测发现:
1) 与白天场景相比,在夜间场景下,试验车辆A1和A2 的AEB 系统预警时刻均较晚且因自行车尾部轮廓属性导致系统感知传感器存在漏识别情况,尤其是在夜间场景;
2) 由于试验车辆A1 所匹配的AEB 系统预警时机普遍较晚,导致其制动执行策略表现为一级制动,通过刹停的方式避免与前方自行车的碰撞。而试验车辆A2 在预警TTC 相对宽裕的情况下,通过二级制动方式减速至15 km/h 以下,以跟随的形式避免碰撞。
3 结 论
本文通过分析2 款同类型乘用车匹配的不同供应商的AEB 系统实测数据,得出以下结论:
系统的制动效能与即碰时间(TTC)及系统制动执行策略具有关联性;
不同偏置率碰撞场景会对系统的预警时机及制动效能产生较大影响;
影响程度因光线条件(白天、夜晚)的不同而存在明显差异性。
同时,本研究优化并丰富了AEB 系统的评价指标,增加了诸如系统预警TTC(碰撞时间)、制动减速度(制动效能)、与目标避免碰撞时的刹停距离、制动策略等评价参数,使评价更全面、具体。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
智能计算机与应用(2022年9期)2022-09-28
汽车实用技术(2022年15期)2022-08-19
中国信息化(2022年5期)2022-06-13
包装工程(2022年1期)2022-01-26
汽车工程师(2021年12期)2022-01-18
意林原创版(2021年7期)2021-08-03
北京汽车(2021年1期)2021-03-04
汽车维修与保养(2015年8期)2015-04-17
小说月刊(2014年11期)2014-04-18