
基于Simulink的机器人实时运动控制平台开发
2022-07-14 02:47:24梁西昌万熠侯嘉瑞辛倩倩
工具技术 2022年4期
梁西昌,万熠,侯嘉瑞,辛倩倩
1山东大学机械工程学院;2高效洁净机械制造教育部重点实验室;3机械工程国家级实验教学示范中心;4山东大学工程训练中心
1 引言
机器人工程是典型的“新工科”专业,涉及到机械、控制、通讯和信息等诸多专业[1,2]。机器人运动控制是机器人工程中的关键技术,融合了机构设计、运动学、动力学和控制方法等方面的内容[3,4]。在教学中加入机器人运动控制实验将提高学生学习的兴趣,加深学生对机器人理论知识的理解。
目前,高校主要使用两种方式开展机器人运动控制实验教学。一种是采用实物开展实验教学,运动控制平台一般基于单片机或嵌入式系统研发[5,6]。这种开发方式便于学生了解机器人底层设计,但同时也需要学生具有扎实的嵌入式系统和C语言编程知识储备。对于没有该方面基础的学生,则较难参与到相关实验中,不利于学生理解机器人运动学、轨迹规划、动力学和控制等抽象复杂的理论知识。另一种方式是采用仿真系统开展实验教学,对机器人控制算法进行单纯的仿真验证[7,8],学生无法直观感受整体的机器运动控制过程。
Simulink是一种基于MATLAB软件的框图化设计环境,可完成机器人系统的建模、仿真和分析等工作。RTW(real-time workshop)是在Simulink环境中的功能模块,提供了实时的开发环境。通过RTW可实现机器人的实时运动控制,进而可将不同的控制方法例如PID、神经网络和模糊控制等应用于实时操作[9,10]。
鉴于此,本文开发了基于Simulink的机器人运动控制实验教学平台。选择Simulink作为编程环境,开发包含目标机和宿主机的控制平台,选择机器人为被控对象。在此基础上,采用常规PID和模糊PID作为控制算法,开展机器人实时运动控制实验,验证所开发平台的有效性。
2 硬件平台设计与开发
RTW工具箱中有单机和双机两种方案。机器人实时运动控制需要确保信息传输的稳定性和实时性,而双机方案相比单机方案具有更高实时性和稳定性,因此选择在双机方案基础上搭建机器人实时运动控制平台。基于双机方案的运动控制平台包括宿主机和目标机两台计算机,在宿主机中安装Simulink,在目标机中使用xPC Target作为实时内核,通过以太网建立宿主机和目标机之间的通信。
机器人实时运动控制实验教学平台设计方案包括硬件系统和软件系统两大部分(见图1)。硬件系统包括控制系统、数据采集通信系统和被控对象,其中,控制系统由宿主机和目标机构成,数据采集通信系统为带有总线接口的板卡,连接目标机和被控对象,被控对象为机器人;软件系统通过Simulink编写的相关程序,依托宿主机编写Simulink控制程序后修改相关参数,然后将程序编译为可执行代码,通过以太网下载到目标机中。

图1 平台设计方案
根据上述方案搭建硬件系统(见图2)。宿主机和目标机通过网线连接,并匹配IP地址。选择的机器人具有4个自由度,可通过CAN总线通讯,臂展1200mm,负载为5kg。
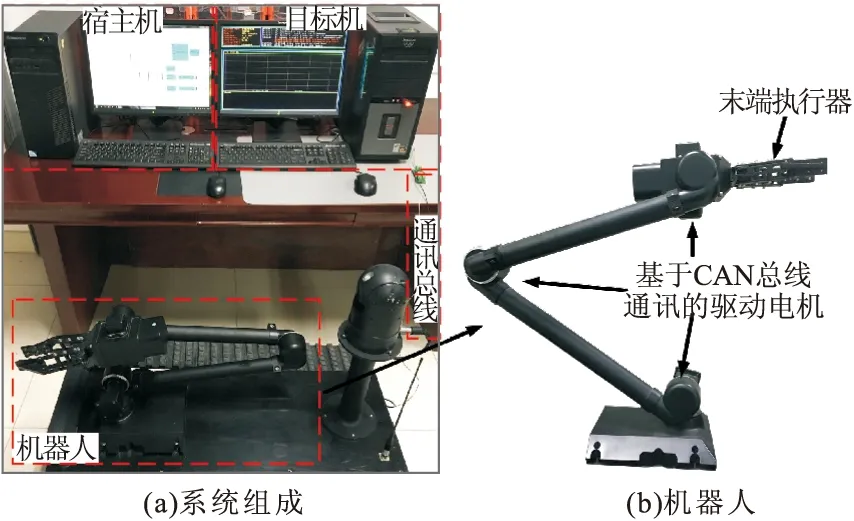
图2 硬件系统
为实现平台中目标机与机器人之间的正常通讯,数据采集系统选择CAN-AC2-PCI型号数采集板卡,该板卡有2个CAN总线接口,可与机器人进行实时通讯,板卡带有PCI接口,能插到目标机的PCI卡槽中。CAN-AC2-PCI板卡及实物安装见图3。

图3 CAN-AC2-PCI板卡及实物安装
3 实时运动控制程序
实时运动控制平台搭建完成后,编写控制程序。在使用该平台时,可选择Simulink编程环境,编写多种控制算法并验证其运动控制性能。本文选择常规PID方法和模糊PID方法作为运动控制算法。通过对比两者之间的控制效果,直观了解两种运动控制方法的差别。
常规PID的表达公式为
(1)
式中,u(t)为输出的控制量;Kp,Ti,Td为固定常系数,由人工调节确定最优的一组参数,其中,Kp为比例增益系数;Ti为积分时间常数;Td为微分时间常数;e(t)为期望值与测量值之差。
模糊PID方法是在常规PID方法的基础上加入模糊控制器,用于解决常规PID中固定常系数无法根据误差实时调整的问题,其原理见图4。
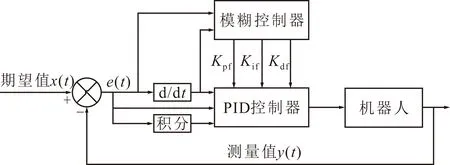
图4 模糊PID控制方法原理
在PID控制器中,初始设置了3个固定参数Kp,Ti和Td。图中加入的模糊控制器可根据反馈的实时误差输出3个实时变化的补偿参数Kpf,Kif和Kdf。借助实时变化的补偿参数调节PID的系统参数Kpm,Tim和Tdm。上述参数之间的关系可表示为
(2)
由此,基于模糊控制器实现了PID的参数自调整。
根据上述理论,基于Simulink编写的控制程序见图5。图中包含输入期望值、数据转换模块、PID控制器、模糊控制器、数据发送单元和数据接收单元,其中,输入期望值为设定值,数据发送和接收单元需与CAN-AC2-PCI板卡进行相关的CAN通讯信息参数匹配。
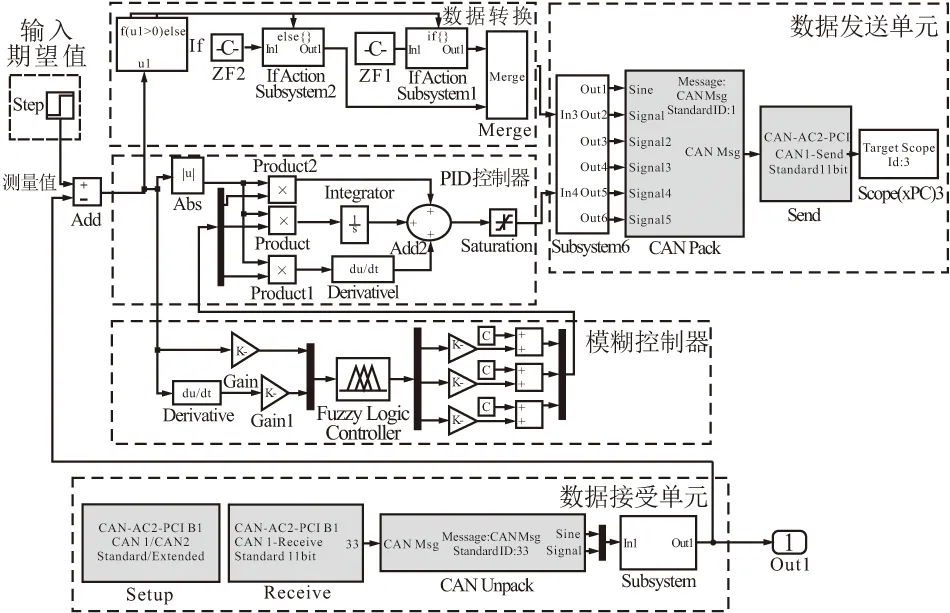
图5 基于Simulink编写的控制程序
4 运动控制实验
搭建好硬件和软件系统后开展机器人实时运动控制实验。选择机器人的第一关节为实验对象,机器人初始角度为0°。选择正弦阶跃信号作为输入期望值,期望阶跃值为10°。采样周期设置为0.01s。选择常规PID和模糊PID方法作为运动控制方法,开展两种控制方法的性能对比实验。
图6为实验结果。可见,常规PID和模糊PID均能控制机器人关节到达期望值。常规PID使用的时间约为3.5s,而模糊PID使用的时间约为3.2s,模糊PID较常规PID使用时间缩短了0.3s。两种控制方法均存在超调现象,常规PID的超调量约为1.1°,模糊PID的超调量约为0.78°,模糊PID较常规PID的超调量减少0.32°。通过上述结果比较可得,模糊PID方法控制效果优于常规PID方法。

图6 实验结果对比
基于所开发的机器人实时运动控制平台采用Simulink编程环境,可拓展编写多种机器人运动控制程序,并具有编程界面友好、便于快速理解不同控制方法对机器人控制性能的影响。
5 结语
本文开发了基于Simulink的机器人实时运动控制平台,包括硬件系统和软件系统。选择PID和模糊PID控制方法,实现了机器人关节对期望阶跃信号的轨迹跟踪运动控制。结果表明,模糊PID方法具有更快达到期望值和更小超调量的优势,并通过实验验证了所开发平台的有效性。
猜你喜欢
装备制造技术(2020年4期)2020-12-25 05:26:02
测控技术(2018年3期)2018-11-25 09:45:46
测控技术(2018年12期)2018-11-25 09:37:42
广西教育·B版(2017年10期)2018-01-16 08:30:56
中国科技博览(2017年45期)2017-11-28 21:55:58
火控雷达技术(2016年3期)2016-02-06 02:30:33
电脑知识与技术(2015年13期)2015-07-13 12:31:29
武夷学院学报(2014年5期)2014-07-19 10:08:30
中国造纸(2014年1期)2014-03-01 02:10:04
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:49
