
基于空域协同的空中目标综合识别方法*
2022-07-11 09:01陈致远沈堤余付平谭芮锶杨天雨黄益恒
现代防御技术 2022年3期
陈致远,沈堤,余付平,谭芮锶,杨天雨,黄益恒
(1.空军工程大学 空管领航学院,陕西 西安 710051;2.中国人民解放军32145 部队,河南 新乡 453000)
0 引言
近几场局部战争表明,敌我双方往往会在某一地域空间内采取多种手段进行激烈的对抗,使得现代战场呈现出了多维立体的态势。特别是在战场空域的使用上,现代战争中的空域使用者除了敌我双方的战斗机、直升机、无人机等作战航空器外,还包括了导弹、高射炮等对空武器装备,以及火箭弹、榴弹炮等地面间瞄火力装备,涵盖海陆空等各类作战平台。随着越来越多的用空武器装备的使用,使得有限的战场空域资源愈发紧张,极大地增加了飞行冲突和误击误伤风险。如何在错综复杂的战场中保护我方高价值目标,最大程度的减少误击误伤,提高对战场空域内航空活动的管理能力和联合作战效能,首先需要解决的就是空中目标敌我识别的问题,只有准确识别每个在空目标的敌我属性,才能为防空决策的制定提供依据,从而达到预期的作战目的。
为实现上述目的,大量专家学者进行了研究。经归纳梳理,这些研究可以分为“理论研究”、“算法研究”、“装备研究”3 个方面。其中,理论研究主要从具体实际出发,提出在进行敌我识别时,除了使用敌我识别器(identification friend of foe,IFF)外,还要充分考虑上级命令、飞行计划等开源情报信息的作用,力求扩大敌我识别的信息来源,减少误判风险。具有代表性的有王君[1]、张志强[2]、崇元[3]等提出的敌我识别理论模型;算法研究主要考虑在目标各项数据已知的情况下,如何使用算法工具提高数据处理能力,力求从信息处理层面获取较为可靠的结果。目前常用的算法工具主要有多源信息融合[4]、人工智能[5]、模糊理论[6]等;装备研究则立足于提高敌我识别装备的技战术性能,力求在复杂态势下也可以较好的探测到空中目标信息并进行准确识 别。具有代表性的是Lee[7]、Akkarat[8]、李 天 琪[9]等对雷达和IFF 的识别性能进行的改进研究。
总体看,以上研究分别从不同方面提高了空中目标敌我识别的能力,但是这些研究更多是关注敌我识别的本身,未对敌我识别与战场空域管理活动的内在联系进行深入探索,不满足未来联合作战的需求,限制了联合作战效能的提升。
基于上述考虑,以美军在战场空域控制方面的先进做法为参考[10],结合我国研究实际[11],提出了一种基于空域协同的空中目标综合识别方法。该方法以提升联合作战效能为牵引,深入研究战场空域控制体系下的空中目标敌我识别活动,实现了敌我识别与空域控制、空中交通管制、防空作战的有机结合。能够在保证精确识别空中目标敌我属性的同时,促进空域管理活动的有效实施,提高空域资源使用效率,降低误击误伤风险。
1 战场空域控制的基础理论
自1918 年的默兹—阿尔贡战役开始,美军针对近距空中支援实施中暴露的问题,开始进行陆空一体化作战的研究工作[12]。以1926 年美军颁布的440-15 号条令为标志[13],美军开始对战区空域控制进行探索。经过近90 年的理论研究和实战检验,美军于2014 年颁布了第三版联合条令JP3-52《Joint airspace control》[14],标志 着美军战场 空域控制体系的完善。
1.1 战场空域控制的基本内涵
随着战场上各类用空活动的实施,使得有限的空域资源日趋紧张,制约作战效能的发挥,因此必须对空域进行管理。基于此,美军提出了“战场空域控制”的理念[15],即通过对空域用户施加最少的限制条件,以实现安全高效的使用战场空域使用。在组织体系方面,美军主要指定联合空中组成部队指挥官同时担任联合空中作战指挥官、区域防空指挥官和空域控制官,实现三者职能的有机统一,并依托战区空地系统(theater air-ground system,TAGS)[16]实施战场空域控制。在运行标准方面,美军通过颁布多军种战术技术条令[17]统一了控制程序和术语,对战场空域控制进行了规范。通过上述形式,美军对空域控制、防空作战、空中交通管制进行整合,促进彼此间的互联互通,减少了用空矛盾,降低了误击误伤风险。
1.2 战场空域控制的作战任务
为促进联合作战效能提升,在实施战场空域控制时需完成以下3 种作战任务[18]:
(1)空情识别任务。即在确保同防空识别要求一致的前提下,依托空域控制程序辅助识别出空中目标的敌我属性,并评估其对己方的威胁程度。通过这种方式,可以为指挥官提供准确的战场态势信息,有利于制定防空作战决策和实施空域控制。
(2)作战管制任务。即根据联合空中作战计划(joint air operations plan,JAOP)和 空域控制计划(airspace control plan,ACP),对航空器实施指挥控制与引导,同时对防空兵、野战炮兵、舰艇等部队的用空火力活动进行监管调控,及时消除彼此间的用空冲突,减少作战限制。
(3)航路管制任务。即对民航和没有任务的军航进行空中交通管制。平时,航路管制和作战管制任务并行推进,互相掌握计划和动态,确保飞行秩序通畅。战时,应由战场空域控制部门统一进行管制调控。无论何时,航路管制都应服从于作战管制,确保二者有机结合共同提高联合作战效能。
1.3 战场空域控制的实施方法
美军为确保战场空域控制的抗干扰性和可持续性,通常采用主动与程序相结合的方式实施空域控制[19],如图1 所示。

图1 空域控制方法示意图Fig.1 Schematic diagram of airspace control method
主动控制是指空域控制部门通过IFF、雷达、通信系统[20]等手段,与空域用户建立连接,对其进行定位识别,并主动对其用空行动进行控制。
程序控制是指空域控制部门通过空域控制计划对各类空域进行预先筹划,并通过颁布空域控制指令(airspace control order,ACO)的形式对用空行动进行程序控制。目前美军的程序控制措施有空域协同措施、火力支援协调措施、机动控制措施、空中交通管制措施、空中基准措施、防空措施、海上防御措施等7 类95 种[21]。
在进行战场空域控制时,既要发挥主动控制高效灵活的优势,积极对用空行动进行控制;也要发挥程序控制通用可靠的优势,一是为主动控制能力薄弱的区域提供支撑,二是作为备用手段,避免敌方压制导致的主动控制失效。
2 基于空域协同的空中目标综合识别方法
根据前面介绍可知,空情识别不仅关系着空域控制的实施,还关系着己方的空防安全。为提高空情识别能力,下面围绕战场空域控制这条主线,通过分析美军空中目标敌我识别先进思想,结合文献[22]研究前景中介绍的敌我识别方法,对基于空域协同的空中目标综合识别方法进行说明。
2.1 美军空中目标敌我识别思想概述
美军针对不同的作战样式设计了不同的敌我识别方法[23],但其识别思想都是相通的,这里以美军在防空战斗中的敌我识别方法为例[24]进行分析,如图2 所示。
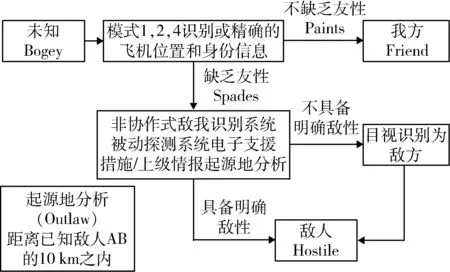
图2 美军防空战斗空中目标敌我识别流程Fig.2 U.S.Forces air defense combat air target identification process
通过图2 可以看出,美军进行空中目标敌我识别时先验证目标不缺乏友性,如无法验证则验证目标是缺乏友性的,接着再验证目标是否具有敌性倾向,若有敌性倾向则验证目标是否具有明确敌性,若目标是具有明确敌性的敌人,就对其采取措施。美军按照这种层层递推的方式,设计出各识别阶段对应的身份标牌,从待识别的“未知目标(Bogey)”到低威胁的“我方目标(Friend)”、“高友性倾向目标(Paints)”,再 到 中 威 胁 的“ 低 友 性 倾 向 目 标(Spades)”、“低敌性倾向目标(Outlaw)”,最后到高威 胁 的“高 敌 性倾 向 目 标(Bandit)”、“敌 方 目 标(Hostile)”,用较为形象的术语实现了敌我识别和威胁评估的同步实施。
以上述思想为基础,结合战场空域控制的要求,美军根据防空战斗识别的原则,给出了一个通用的识别矩阵示例[25],如图3 所示。

图3 美军防空战斗识别矩阵Fig.3 U.S.Forces air defense combat identification matrix
通过该识别矩阵可以看出美军空中目标敌我识别的整个过程严格遵循由验证不缺乏友性层层递推直至识别出明确属性的这条主线,以主动和程序相结合的方式作为支撑保障,建立了一个完善的识别体系。整个过程中,不以一个阶段的结果作为最终结果,而是根据流程对识别结果进行动态更新,以此实现空中目标敌我识别能力的提升。
2.2 空情识别中典型程序控制措施的使用方法
为全面了解空中目标综合识别方法的前置手段空域协同措施的相关内容,下面根据结合美军战斗防空识别思想和空域控制条令[26]对几种典型程序控制措施的概念与使用方法进行说明,具体如图4 所示。
图4 为联合作战战场空域控制态势图,该图中共给出了空域协同措施、防空措施、空中基准措施、机动控制措施、火力支援措施等5 类典型的程序控制措施。
空域协同措施(air coordinating measures,ACM)共有空中通道、限制行动空域、独立协同措施等3 大类25 小类[27]。图4 中分别给出了空中通道中的最小风险通道、低高度层穿越通道、空中走廊;限制行动空域中的空中预警区、空中指挥与控制区、空中战斗巡逻区等。最小风险通道(minimum-risk route,MRR)是提供给航空器低空快速穿越前方战斗地带时使用的单向空中走廊。该通道是根据已知的能够对通道中航空器所产生的最小威胁建立的,能够最大程度地降低已方防空对航空器的误击误伤风险;低高度层穿越通道(low-level transit route,LLTR)是在我方前沿区域内设置的双向空中走廊,用于连接己方前沿与后方;空中走廊(air corridor,AIRCOR)是一种用于后方地域两点之间通航的限制性空中通道,可以连接待战地域、战斗地域、加油区、武装点以及其他友邻区域。空中预警区(air⁃borne early warning area,AEW)和空中指挥与控制区(airborne command and control area,ABC)是提供给执行空中预警和指挥控制任务的飞机使用的空域;空中战斗巡逻区(combat air patrol,CAP)是用于己方战斗机在重要保护区域上空进行巡逻并意图攻击该区域的敌机进行拦截和摧毁。

图4 联合作战战场空域控制态势图Fig.4 Battlefield airspace control situation map of joint operation
防空措施中有低空导弹交战区(low-altitude missile engagement zone,LOMEZ)、战 斗 机 交 战 区(fighter engagement zone,FEZ)、导弹交战区(missile engagement zone,MEZ)、联合交战区(joint engage⁃ment zone,JEZ)和基地防御区。前3 种防空措施的对空攻击任务分别由战斗机、导弹、低空导弹、多种防空系统(通常是战斗机和导弹)担任;基地防御区(base defense zone,BDZ)是在空军基地周围设立保护该基地的近程防空武器交战区。
空中基准措施中有敌我识别器开/关线和空中控制点。敌我识别器开/关线(IFF switch on/off line,IFF ON/OFF)通常与己方部队前沿线一同设置,航空器在越过该线时应开始或停止发射IFF 信号;空中控制点(air control point,ACP)是用于指挥控制及导航通信的点,也可以用于空中走廊的划设[28]。
机动控制措施中有己方部队前沿线(forward line of own troops,FLOT)。该线用来标识作战中己方部队的最前沿位置。
火力支援措施中有火力支援协调线(fire sup⁃port coordination line,FSCL)。该线一是用于规范地面火力使用,二是用于区分航空兵的对地打击任务及战斗范围,如近距空中支援(close air support,CAS)和空中遮断(air interdiction,AI)等[29]。
通过介绍可知,航空器的飞行活动多是以空域协同措施为基准的,对其敌我属性的识别也多是围绕航空器在空域协同措施中的飞行活动展开的。其他4 类措施主要用于协助完成航空器的各类作战任务。因此战场空域控制体系下的空情识别可以称为基于空域协同的空中目标综合识别。
2.3 基于空域协同的空中目标综合识别方法的基本理念
虽然美军给出了上述空中目标敌我识别方法,但其是基于美军作战特点设置的,不利于相关领域的研究与应用,下面在借鉴美军先进经验的基础上,结合文献[1-3]中的研究实际,提出了一种基于空域协同的空中目标综合识别方法。
空中目标综合识别是指在战场空域控制的体系下,通过综合使用IFF、雷达等各类技术手段和以各类空域协同措施为代表的程序手段,对空中目标的敌我属性进行识别的过程。空中目标综合识别不仅需要识别空中目标的敌我属性,还要对其进行威胁评估。这样防空部门便可根据交战规则选用合适的方法应对不同威胁的空中目标。
空中目标综合识别主要用于识别沿最小风险通道由敌方空域进入己方空域的目标。为便于理解,下面结合图5 进行说明。
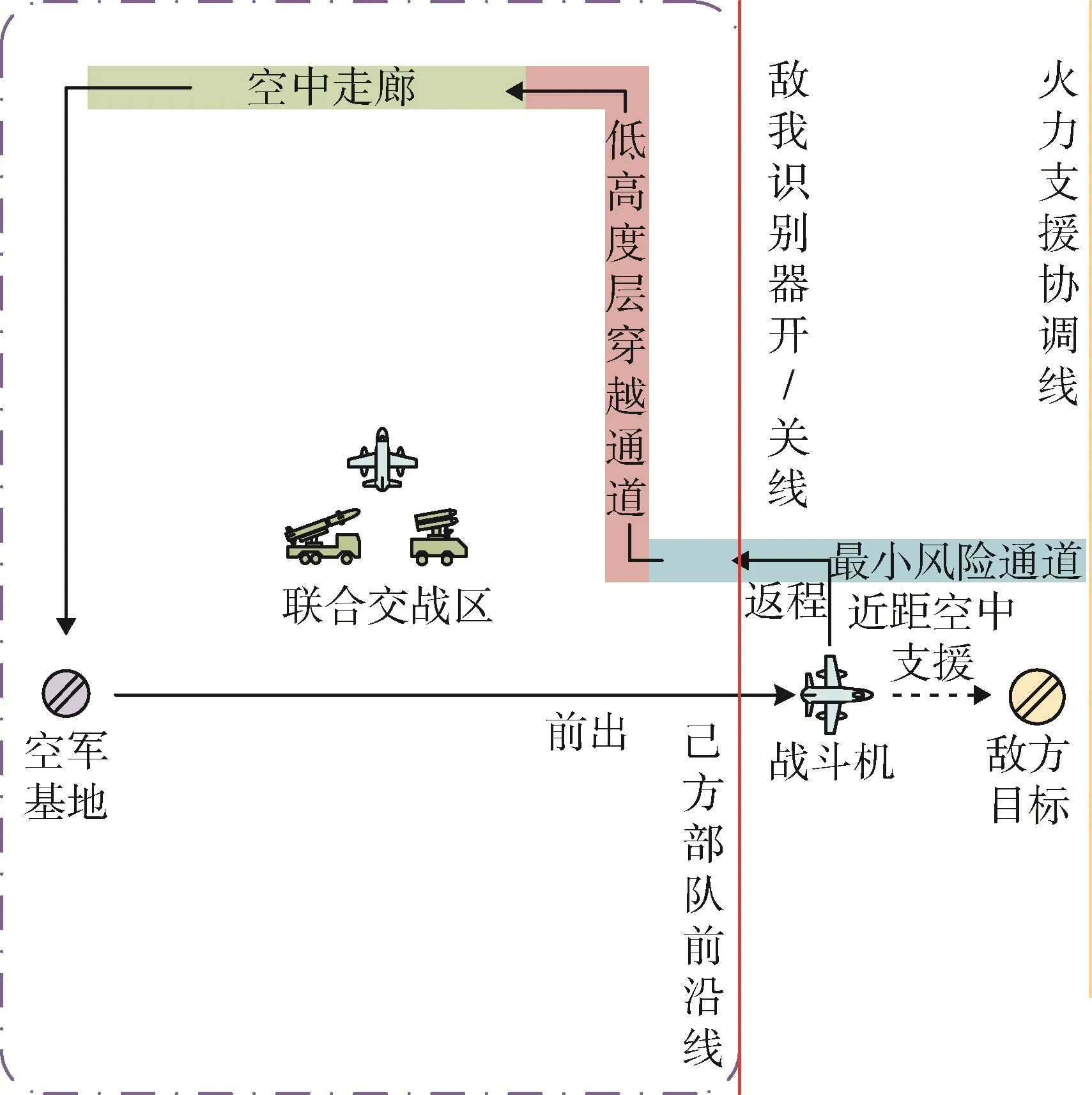
图5 战斗机前出与返程示意图Fig.5 Schematic diagram of fighter aircraft forward and return
图5 中为执行近距空中支援任务的战斗机前出返场过程中的航迹示意图。己方部队前沿线以左为己方空域,己方在该区域中拥有较强的空域控制能力;己方部队前沿线以右为交战区域,由于敌方的干扰压制,己方的空域控制能力在该区域中会受到一定削弱。
通常情况下,航空器执行作战任务需要经历“己方机场—作战空域—返回本场”这个过程[30]。在航空器由己方机场前往作战空域的过程中,一般不会发生误击误伤,误击误伤最大的风险,是在完成作战任务后返回己方机场的这个过程中。因为航空器在到达作战空域前,己方已经掌握该航空器的飞行计划,其通信联络正常且IFF 应答正确,因此该航空器一定是己方。当航空器到达作战空域后,对于在己方实际控制区域内的航空器,仍可通过上述几种方式来核验其身份。对于在己方实际控制区域外的航空器,在航空器越过敌我识别器开/关线之前,均可以通过上述手段证明其为己方。越过该线后,航空器离开己方防空导弹作战区,更不会发生误击误伤。
在航空器完成作战任务返场时,为避免交战区域内己方火力误伤,此时航空器需要沿最小风险通道向我方飞行,由于受到敌方压制,己方识别能力受限,因此主要将最小风险通道作为确保航空器安全返场的手段使用。在航空器越过敌我识别器开/关线即将进入我方空域时,该区域实际上还会受到敌方压制影响,此时技术手段可靠性有限,尤其是在敌我识别系统受损情况下,很有可能会被误认为敌方;若敌方破获己方飞行航迹等信息,沿我方预先规划的最小风险通道假扮我机,此时程序手段难以识别敌方目标,势必造成防空作战处于被动。因此在航空器进入己方空域的过程中必须结合使用技术手段和程序手段,对空中目标进行综合识别,实现两种手段的优势互补,最大程度的提高识别能力,防止误击误伤,确保己方空防安全。
2.4 基于空域协同的空中目标综合识别方法的运行流程
通常情况下,己方空防安全的压力主要来源于敌方正面上的集中攻击。因此,自航空器到达敌我识别器开/关线打开IFF 进行应答时开始,至航空器使用空域协同措施返回己方机场为止,空中目标综合识别必须贯穿这个过程始终。为便于理解,下面结合图6 进行说明。
由图6 可知,当航空器到达敌我识别器开/关线时,需要打开IFF 进行应答,并尝试与己方建立通信连接,己方会对该航空器的身份进行核实。需要注意的是,当航空器越过敌我识别器开/关线至降落机场后,其IFF 应一直处于打开的状态。
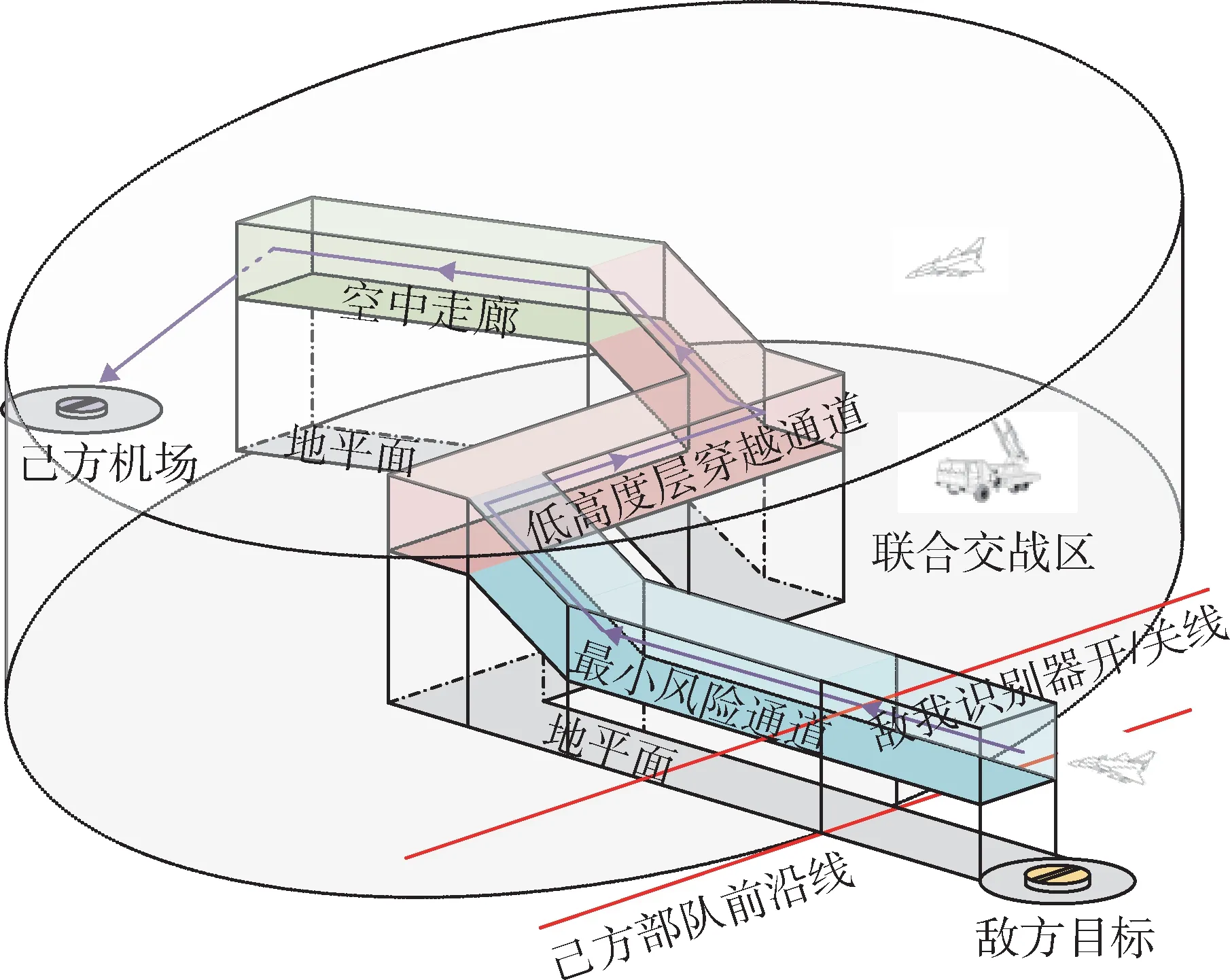
图6 空域协同措施立体示意图Fig.6 Three-dimensional schematic diagram of air coordinating measures
接着,航空器按照约定进入最小风险通道,在该航线中应严格遵守飞行标准。此时,己方会根据航空器的实际飞行参数和航迹,结合IFF 应答情况识别其身份。需要注意的是,这里不局限于以上2种手段,可根据实际情况选择其他手段进行补充。
然后,航空器进入低高度层穿越通道进行机动,由于低高度层穿越通道是双向走廊,为避免相撞应按照“东单西双”的原则飞行。由于低高度层穿越通道是连接前沿与后方的重要枢纽,若敌方混入该通道,就会给己方带来极大威胁,因此仍需对其进行识别、监视和跟踪。同样地,这里不局限于上述手段,应根据实际情况进行补充。
最后,航空器进入空中走廊准备返场,此时航空器已远离前沿且经被多种手段证明为己方,因此误击误伤风险较小,此时己方主要对其进行监视、定位和跟踪,确保航空器可以安全的返回机场。
2.5 空中目标综合识别方法的判别逻辑
通过前面的分析可知,美军设计了形象的术语来实现敌我识别和威胁评估的有机结合。为便于后续的工程化应用实现,这里设置“我方目标(Friend)”、“高友性倾向目标(Paints)”、“中等友性倾 向 目 标(Acquaintance)”、“ 低 友 性 倾 向 目 标(Spades)”、“属性不明目标(Chaos)”、“高敌性倾向目标(Bandit)”、“敌方目标(Foe)”等7 类身份标牌来描述空中目标的敌我属性,下面对IFF 和空域协同措施种2 种手段结合情况下的判别逻辑进行说明,如图7 所示。
图7 中上下2 个部分描述了航空器刚到达敌我识别器开/关线和进入我方空域后的综合识别判别逻辑。通常情况下IFF 主要根据应答次数进行判断[31],空域协同措施则根据“高度、速度、航向”进行判断,实际应用中应根据需要动态调整。

图7 空中目标综合识别的判别逻辑Fig.7 Air target comprehensive identification and discrimination logic
当航空器到达敌我识别开/关线打开IFF 后,此时航空器处于己方和敌方的交界地带,IFF 会受到压制。此时己方应主动使用其他手段验证其身份,若仍不符合识别规定,则认为该目标是“敌方目标”。若符合识别规定,由于前置识别手段IFF 失效,应赋予其“低友性倾向目标”标牌。为防止敌方进行IFF 欺骗,即使符合应答规定,仍不能认为该目标为“我方目标”,应认为该目标是具有友性倾向且威胁较低的“中等友性倾向目标”。
对于识别为“中等友性倾向目标”和“低友性倾向目标”的航空器,允许进入空域协同措施返航。航空器在空域协同措施中飞行时,需要综合判断其飞行参数和IFF 的应答情况。通常情况下,己方在执行任务前就已预先掌握标准飞行参数,在IFF 未受损的情况下,若符合空域协同措施和IFF 的相关规定,则可以识别为“我方目标”。为避免航空器受损而引起的误击误伤,对于能够正常IFF 应答但飞行姿态只能满足部分标准的目标,应认为是“高友性倾向目标”,同时应采取其他手段尽快验证其身份。对于无法进行IFF 应答,且只满足部分飞行标准的目标,应认为该目标是具有一定敌性倾向且威胁较大的“高敌性倾向目标”。若航空器既无法进行IFF 应答,又不满足飞行标准,应认为是“敌方目标”。此外,若航空器只能符合2 种识别手段的一种,则应认为该目标是属性不明的“属性不明目标”,必须对其重新识别,直至识别出明确的敌我属性。
通过上述方式,使用符合人逻辑思维的术语来描述目标的敌我属性和威胁程度,动态迭代更新有利于敌我属性,可以较好地提高综合识别能力。
3 基于空域协同的空中目标综合识别方法的工程化应用思路
空中目标综合识别是一种较为复杂的系统性问题,需采用定量与定性相结合的方法进行研究[32]。这里以多源信息融合领域中的D-S 证据理论[33]和模糊数学领域中的隶属度函数[34]、模糊推理[35]、直觉模糊集[36]为工具,对空中目标综合识别工程化应用中的关键问题进行分析,并提出相应的解决思路,为后续的实例分析打下基础。
3.1 工程化应用中的关键问题
为想确保空中目标综合识别的工程化应用,必须解决以下2 个重要问题:
(1)信息融合策略与转换问题。空中目标综合识别需要对各手段得到的信息进行汇总从而得到综合识别结果,因此需要选择合适的信息融合策略;此外,由于各手段得到的信息没有统一的量纲,为方便融合计算,还需选择合适的工具将上述信息转为规范的算法输入语言。
(2)各手段间的不确定性信息处理问题。受制于外部因素的影响,各手段得到的信息会存在一定程度的不确定性,必须选择合适的融合方法降低不确定性信息的影响,提高识别结果的精确性。
经综合考虑,这里使用D-S 证据理论作为工程化应用的算法支撑,D-S 证据理论是以基本概率赋值(basic probability assignment,BPA)为计算对象,通过D-S 组合规则对各BPA 进行组合,即可得到融合结果。D-S 证据理论适用于不同的信息融合策略,能够将各类信息转化为统一的BPA,还可以有效降低数据中的不确定性信息的影响。基于D-S 证据理论进行工程化应用,则上述问题即可转化为DS 证据理论中的信息融合策略问题、BPA 构造问题和证据融合问题,下面以D-S 证据理论为主干,对空中目标综合识别工程化应用思路进行探讨。
通过提供优惠政策,使贫困县获得特殊的发展条件以减轻或部分抵消其自然条件和发展落后施加于地方发展的限制,在局部形成政策优势,在不同阶段给予贫困地区不同的优惠政策,如土地政策、进出口政策、减免农业税,出让部分中央政府和地方政府的收益给贫困地区和贫困户,或者改善其发展环境、提高其竞争和发展能力,或者直接增加其福祉。
为便于建模分析,下面给出的建模思路均是围绕航空器在空域协同措施中的空中目标综合识别活动展开的。根据美军以空中目标的IFF 应答次数界定目标友性或敌性倾向的思想,这里设定空中目标的应答次数为询问次数的一半以上即可认为该目标符合应答规定且具有友性倾向,反之,则认为该目标具有敌性倾向。设定由IFF 和ACM 得出的识别结果依次为“我方目标”、“高友性倾向目标”、“高敌性倾向目标”、“敌方目标”等4 类识别术语。若综合识别结果为“高友性倾向目标”或“高敌性倾向目标”且小于规定阈值,则认为该目标是“属性不明目标”,应继续识别。
3.2 空中目标综合识别的信息融合策略
为扩展探测信息来源,目前国内外通常以部署多部传感器并进行多周期识别的方式实施空中目标综合识别[37-38],基于此,下面给出一种典型的空中目标综合识别的融合策略,具体如图8 所示。
由图8 可知,空中目标综合识别中信息融合典型思路是先以同类信息融合的方式分别对基于IFF得到的物理信息和基于空域协同措施的战术信息进行融合。得到对应的融合结果后,再进行异类信息融合,即可得到各时刻的综合识别结果。为提高识别的可靠性,还需进行多周期融合以得到最终的空中目标综合识别结果。需要注意的是,空中目标综合识别中需要使用的传感器数量和连续识别时的探测次数应根据作战实际进行确定。
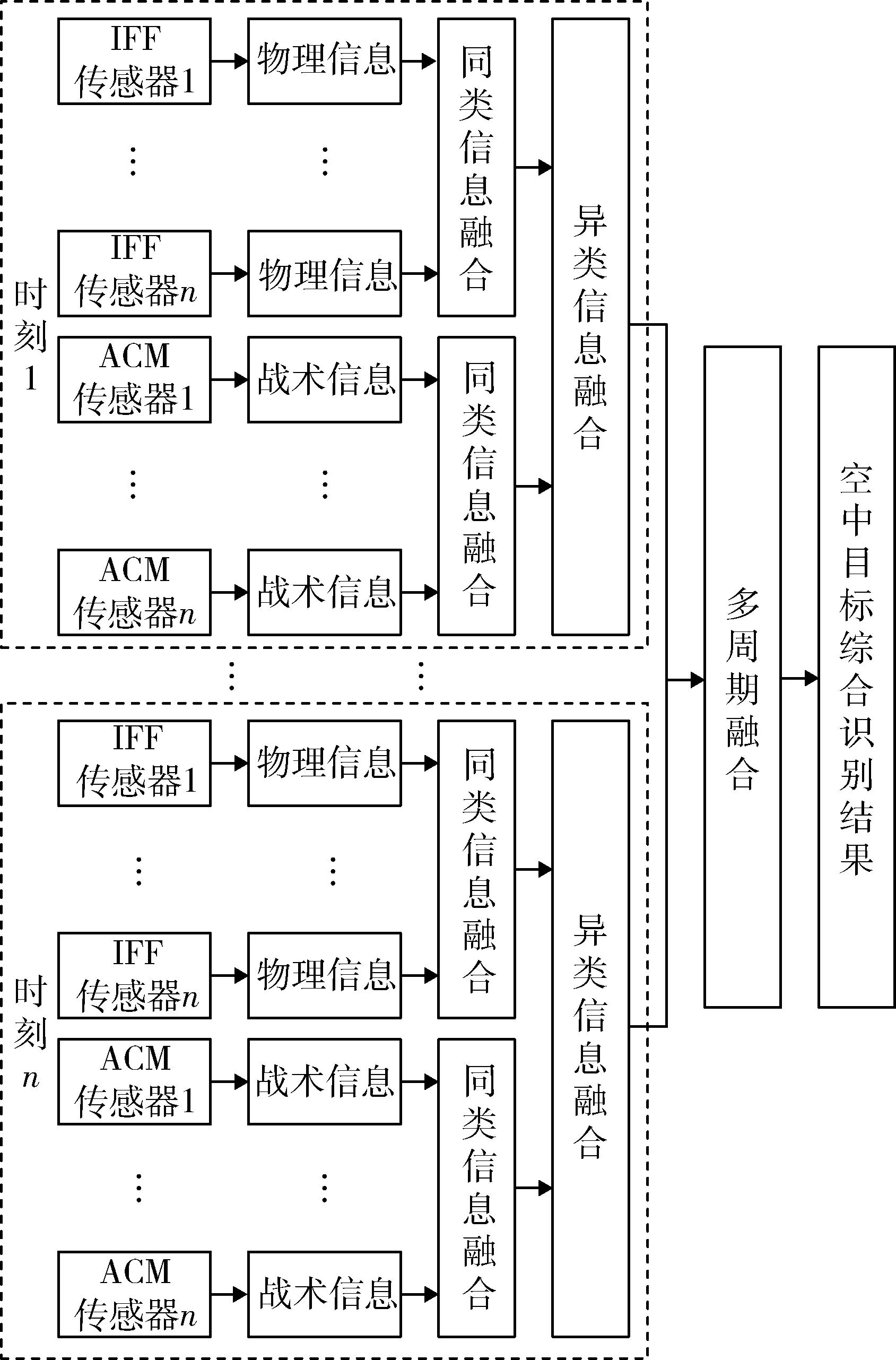
图8 空中目标综合识别的数据融合策略Fig.8 Data fusion strategy for air target comprehensive recognition
3.3 基于隶属度函数和模糊推理的BPA 构造
(1)基于隶属度函数的敌我识别器的BPA 构造
IFF 是根据空中目标的应答次数来判断敌我属性,它们之间是一种模糊线性关系,隶属度函数可以较好地进行处理。根据3.1 节的分析,这里设定各时刻IFF 共进行10 次询问,若目标应答8 次以上,则认为其具有明确的友性倾向,识别结果应为“我方目标”。若应答5~7 次,则认为该目标为“高友性倾向目标”。若应答3~5 次,则认为该目标为“高敌性倾向目标”。若应答2 次以下则为“敌方目标”。则“我方目标”和“敌方目标”的高斯隶属度函数公式以及“高友性倾向目标”和“高敌性倾向目标”的高斯隶属度函数公式为
式中:b和σ分别为高斯隶属度函数的中心和宽度;a和c分别为IFF 询问次数的下限和上限。
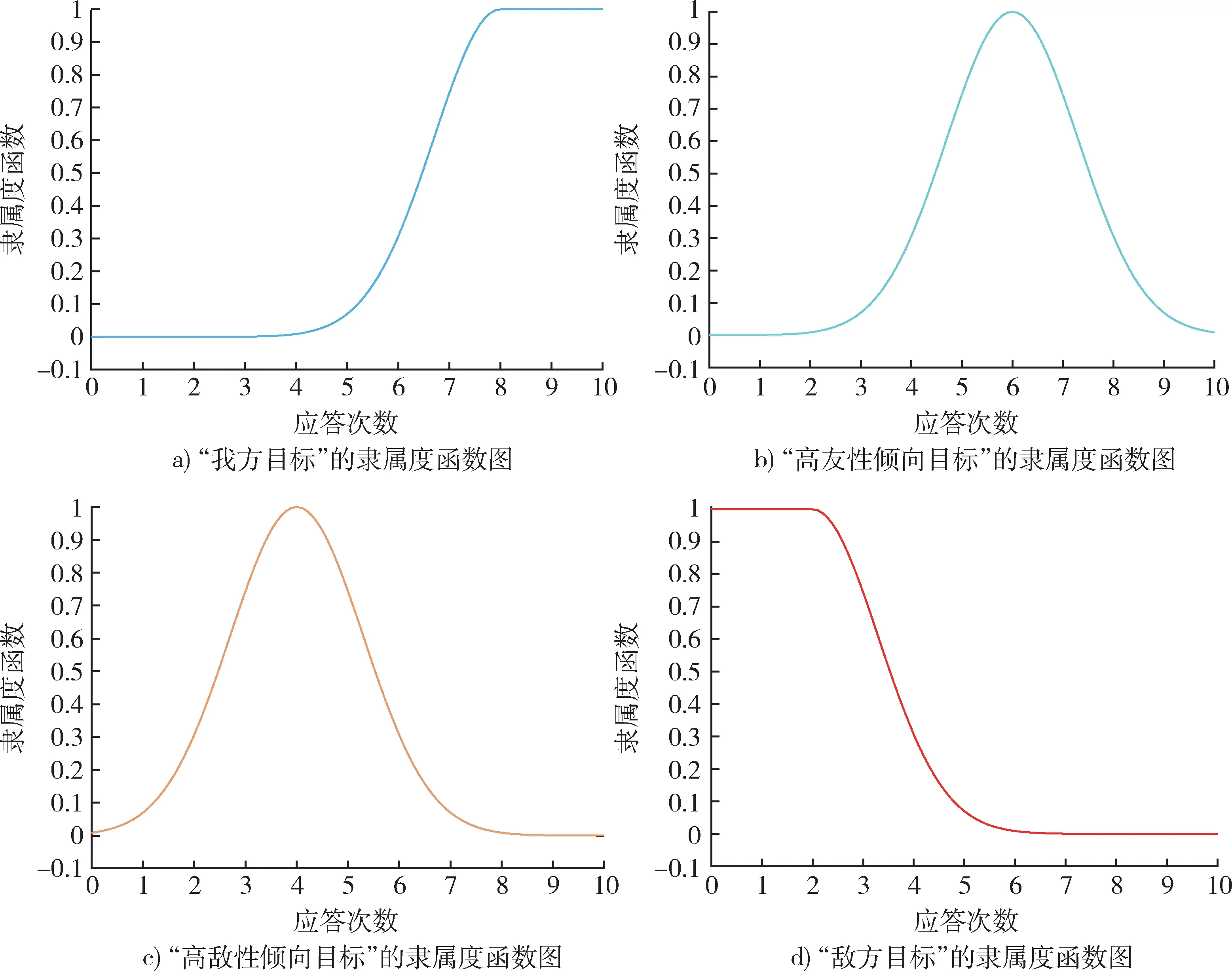
图9 隶属度函数分布图Fig.9 Distribution diagram of membership function
由于上述隶属度分别反映了4 类标牌的BPA 分配情况,对其归一化即可得到的敌我识别器的BPA,公式为

式中:i= 1,2,3,4;λIFF为数据的可靠程度,由专家确定;yi和mIFF(xi)分别为“我方目标”、“高友性倾向目标”、“高 敌 性 倾 向 目 标”、“敌 方 目 标”等4 类标牌的隶属度和BPA。
(2)基于模糊推理的空域协同措施的BPA 构造
空域协同措施中的敌我属性判别是根据空中目标的实际飞行参数是否符合标准来判断的。由于空域协同措施中主要有“高度、速度、航向”等3 类参数,可以看出它们之间是一种多维的模糊关系,此时模糊推理工具可以较好的进行处理。这里将目标实际飞行参数与标准参数的偏离程度ΔH,ΔV,ΔC作为输入变量,将输出变量确定为“我方目标”FR、“高友性倾向目标”PA、“高敌性倾向目标”BA、“敌方目标”FO,根据防空识别中航空器允许偏离标准航迹的范围[39],确定3 个飞行参数允许的变化范围分别为[0,100]m,[0,50]km/h,[0,10°],接着使用高斯隶属度函数将其规范化处理为5 个等级的模糊子集[40],即可得到各变量对应的模糊输入和输出的隶属度函数图。下面给出部分模糊输入和模糊输出的隶属度函数Matlab 仿真图如图10 所示。
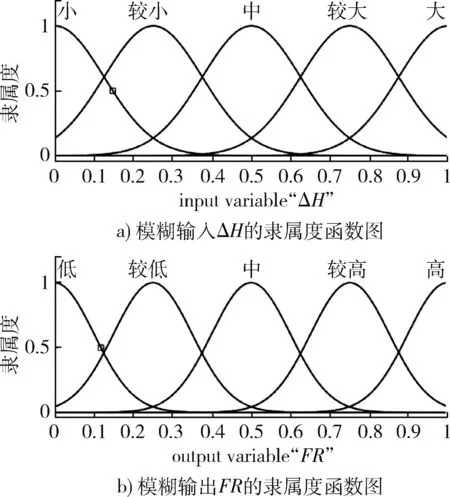
图10 基于Matlab 的模糊输入与输出的隶属度函数图Fig.10 Fuzzy input and output membership function graph based on Matlab
由图可知,每个输入变量均有5 个隶属度函数,因 此 该 模 糊 系 统共 有N=NΔH·NΔV·NΔC= 125 个 模糊推理规则。结合2.5 节,建立模糊推理规则如表1所示。

表1 空中目标综合识别模糊推理规则Table 1 Air target comprehensive identification of fuzzy reasoning rules
为检验所建模糊推理规则的合理性,下面使用Matlab 绘制这些模糊规则对应的输入输出三维映射曲面图,若映射曲面光滑则证明所建规则合理,下面给出了部分模糊输入输出的三维映射曲面图如图11 所示。

图11 输入输出三维映射曲面Fig.11 Input and output 3D mapping surface
其中,ΔH,ΔV,ΔC分别对应输入变量的模糊输入值;FR,PA,BA,FO分别对应输出变量的模糊输出值,它们的取值范围均为[0,1]。经检验,上述三维映射曲面较为光滑,说明模糊推理规则是合理的。以重心法为解模糊算法,即可得到输出变量FR,PA,BA,FO的模糊输出值。
由于上述输出值可以看做是输出变量对应证据的BPA 的组成部分,对其归一化即可得到空域协同措施的BPA 为
式中:k= 1,2,3,4;λACM为数据的可靠程度,由专家确定;uk和mACM(Uk)为表示“我方目标”、“高友性倾向 目 标”、“高 敌 性 倾 向 目 标”、“敌方目标”等4 类标牌的模糊输出值和BPA。
3.4 基于证据理论和直觉模糊集的证据融合
(1)基于证据支持度的物理类证据融合
受制于IFF 自身性能和敌方压制影响,多部IFF探测的信息并不完全相同,因此基于这些信息构造的证据的可靠度也不相同,必须对其修正。由于IFF 只获取应答次数这类信息,因此使用证据支持度即可清晰反应证据间的可靠程度。这里使用焦氏证据距离与冲突系数组合的方式来计算证据支持度,则焦氏证据距离的公式为[41]

式中:mi和mj为辨识框架Θ上的证据;mi和mj为其向量形式;--D为一个有2n× 2n个元素的相似性矩阵。则证据mIFFi和mIFFj间的组合冲突度为即可表示为
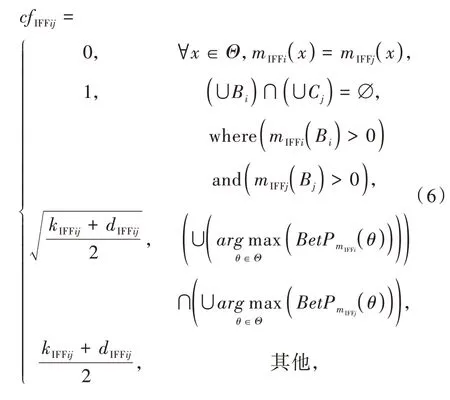
式中:kIFFij表示证据mIFFi和证据mIFFj间的证据冲突。根据式(6),即可得到2 个证据间的组合冲突度矩阵如下:

那么根据该组合冲突度即可计算出由证据mIFFi受到的支持程度,继续计算即可得到基于证据支持度的证据权重为
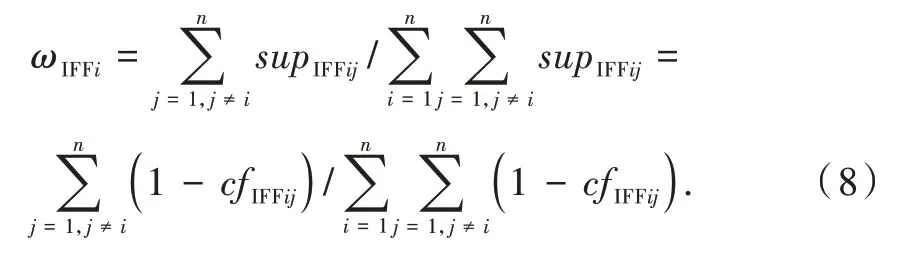
将式(8)求得的证据权重与最大权重的比值作为折扣系数对证据mIFFi进行折扣修正融合,即可得到物理类证据的融合结果。
(2)基于直觉模糊多属性决策的战术类证据融合
使用空域协同措施判别空中目标敌我属性需要综合使用高度、速度、航向等3 类飞行参数的信息,此时使用证据理论会增大计算量,由于空中目标综合识别本质上也是根据多时刻(专家集)的探测数据,确定敌我属性(方案集)在识别手段(属性集)中的评价值并进行选优,因此使用多属性决策思想进行目标识别是可行的。这里主要使用直觉模糊多属性决策中的属性信息集结方法实现战术类证据的融合。相关研究表明[42],直觉模糊集和证据理论在一定条件下是可以相互转化的,公式为

式中:μA(x)和γA(x)分别表示元素x属于直觉模糊集A的隶属度和非隶属度。根据式(9),首先将空域协同措施中的BPA 转化为直觉模糊数dij=(μij,γij)。这里使用直觉模糊熵[43]和模糊熵组合的交叉熵[44]来处理属性信集结中不确定性信息,公式为
式 中:ΔA(xi) =|μA(xi) -γA(xi)|;ES(A)为 交 叉 熵;EI(A)为直觉模糊熵;EF(A)为模糊熵。则属性信息权重计算公式如下:

接着,将属性信息转化为直觉模糊框架下的BPA,公式为

将式(13)求得的证据权重与最大权重的比值作为折扣系数对由式(14)转换后的BPA 进行折扣修正与融合,即可得到战术类证据的融合结果。
(3)基于证据动态可靠性的多周期证据融合
进行多周期证据融合时,首先应进行各时刻的异类证据融合,为避免冲突系数k的不足,这里使用信度熵度量异类证据之间的冲突程度。信度熵[45]是对香农熵的推广,信度熵越小,表明证据中含有的不确定性信息越少;反之,表明证据中的不确定性信息越多,其公式为

式中:|A|为焦元A的基数,表示焦元A中所含元素的个数。根据式(15)分别计算证据mIFF和证据mACM的权重,并将各证据权重与最大权重的比值作为折扣系数,对各证据进行折扣修正与融合,即可得到各时刻的异类证据融合结果。
接着,使用直觉模糊框架下的证据动态可靠性思想[42]来进行多周期融合,即根据式(9)将各时刻的异类证据融合结果转化为直觉模糊集,接着使用欧氏证据距离度量各直觉模糊集之间的相似度,公式为

根据式(16)即可求得由直觉模糊集计算出的证据mi和证据mj间的支持程度,接着构造证据支持度矩阵SUP为
将矩阵各行相加即可得到证据mi的动态可靠性,公式为

则证据mi的动态可靠性权重为

将式(19)求得的权重作为折扣系数,对各时刻的证据进行折扣修正与融合,即可得到最终的空中目标综合识别结果为

4 空中目标综合识别的工程化应用实例
4.1 实例计算
设辨识框架Θ={x1,x2,x3,x4},Θ中的元素依次表示FR,PA,BA,FO等4 类标牌。设我方在前沿阵地分别使用三角形和梯形部署的方式,各部署了3部IFF 和雷达来进行识别,规定所有设备都必须对空中目标进行至少3 个时刻的探测,所有返航的航空器必须按照标准参数飞行。若综合识别结果为“高友性倾向目标”或“高敌性倾向目标”且满足|mPA-mBA| ≤0.2,则认为该结果为“属性不明目标”需重新识别。为方便计算,这里主要以最小风险通道中的敌我识别对例进行验证,设该次作战任务中最小风险通道的标准飞行参数为航向270°、高度1 200 m、速度300 km/h。
已知己方部队前沿线外共有3 批目标沿最小风险航线向我方空域飞行,设定目标1,2 为“我方目标”,目标3 为“敌方目标”。IFF 的初步筛选要求为应答6 次以上,经探测3 批目标的相关信息如下:
(1)目标1
目标1 航空器状态良好,IFF 工作正常,未受到敌方压制,在越过敌我识别器开/关线时进行了7 次应答,因此初步认定该目标是“中等友性倾向目标”,可以指挥其进入最小风险通道进行识别。经探测其相关数据如表2 所示。
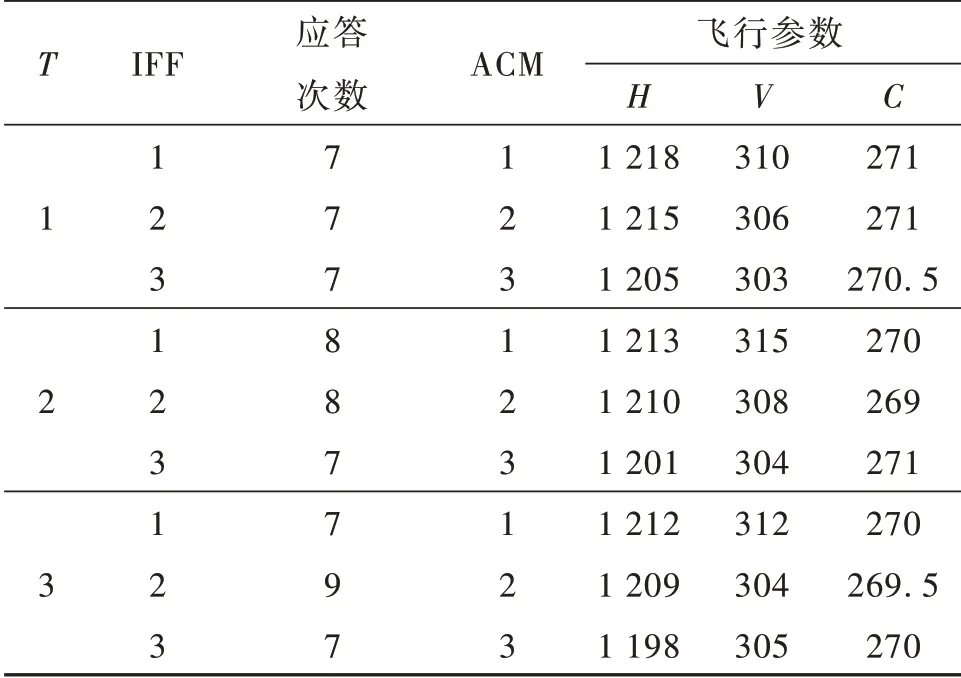
表2 目标1 的探测数据Table 2 Target 1 detection data
(2)目标2
目标2 受损严重,飞行姿态难以保持,IFF 工作正常,但受到一定压制,在越过敌我识别器开/关线时进行了5 次应答,因此IFF 失效,经验证目标2 符合其他手段的识别要求,因此初步认为该目标是“低友性倾向目标”,可以指挥其进入最小风险通道进行识别,但必须加强对该目标的关注。经探测其相关数据如表3 所示。
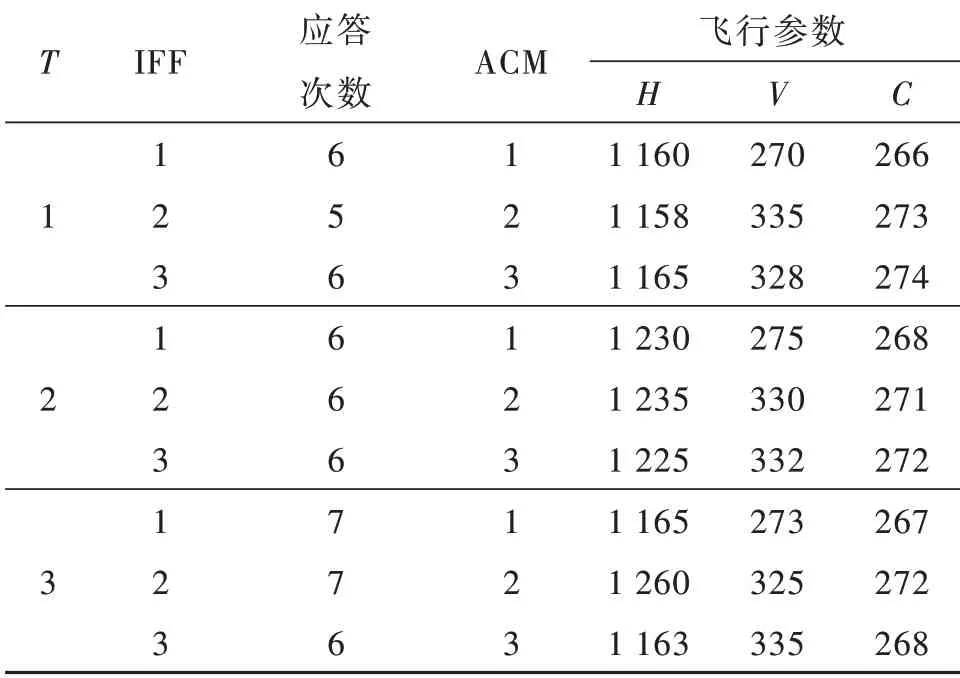
表3 目标2 的探测数据Table 3 Target 2 detection data
(3)目标3
目标3 为“敌方目标”,试图混入最小风险通道对我实施打击,在越过敌我识别器开/关线时,成功进行IFF 应答欺骗并进行了6 次应答,因此初步认为该目标是“中等友性倾向目标”,可以指挥其进入最小风险通道进行识别。经探测其相关数据如表4所示。
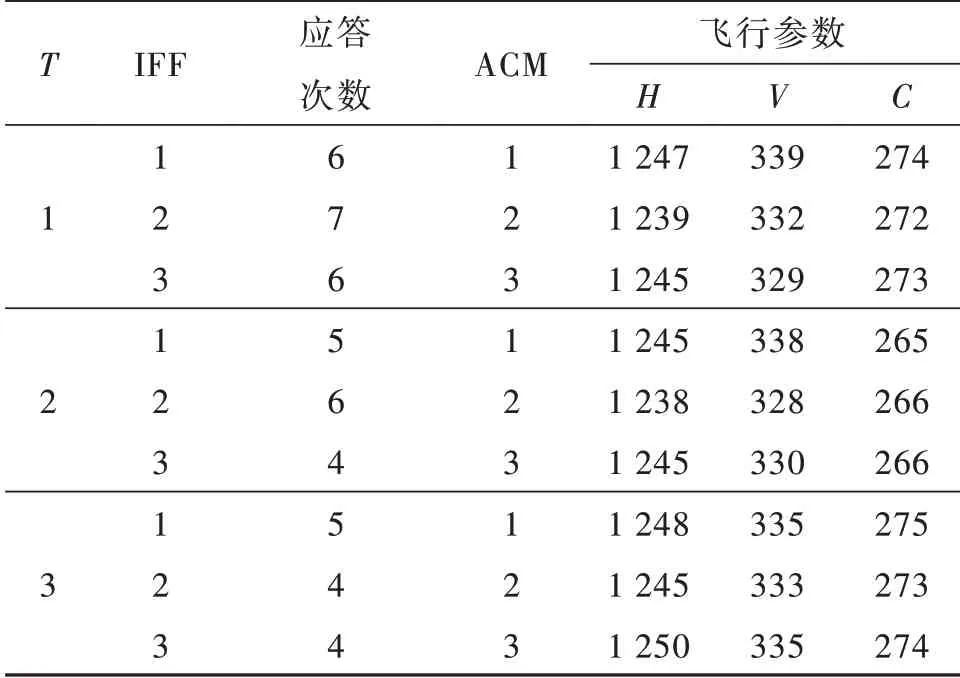
表4 目标3 的探测数据Table 4 Target 3 detection data
根据的IFF 和雷达的部署位置和受压制情况,结合专家经验即可得到各时刻对应的IFF 和ACM的数据可靠程度为

为便于说明,简化具体的计算步骤,以目标1 为例进行计算,根据式(1)~(3),可求得各时刻IFF 的BPA 为
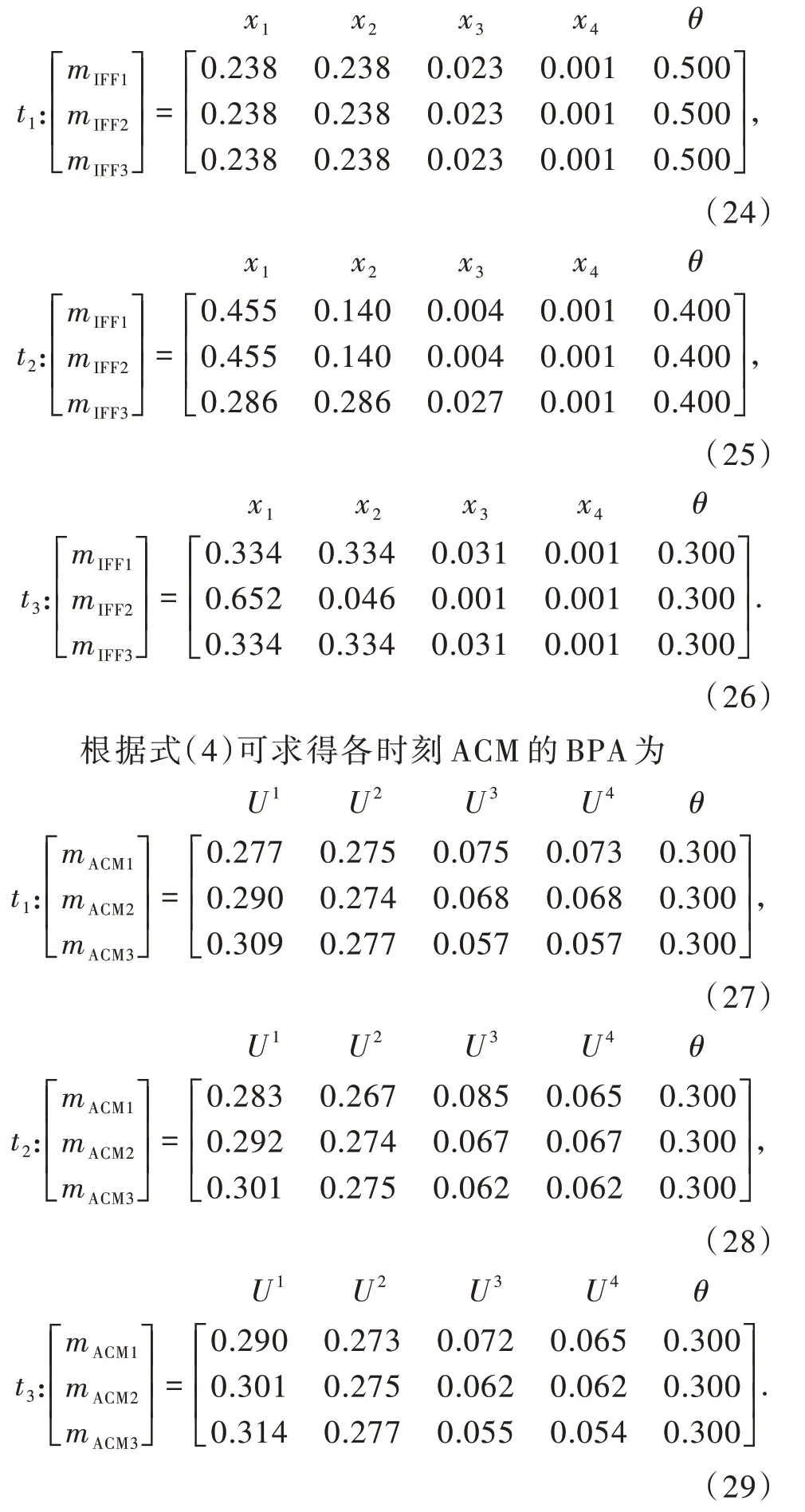
为简化计算流程,首先根据式(5)~(8)和(9)~(14)分别对物理类证据和战术类证据进行修正与融合,接着根据式(15)~(20)可以得到各时刻修正后的异类证据融合结果以及多周期融合结果,最后以上述方法计算目标2,3 的数据,可得3 批目标的综合识别结果如表5 所示。

表5 3 批目标的识别结果Table 5 Three batches of target identification results
4.2 结果分析
(1)目标1 的综合识别结果为“我方目标”。由于目标1 未受损,IFF 工作正常,返航过程中受到压制有限,因此整个识别过程中目标1 的IFF 应答结果是始终是符合要求的。在最小风险通道中飞行时,目标1 预先掌握了进入最小风险通道飞行时的相关要求,整个飞行过程中较为符合标准,因此最终的综合识别结果为我方,符合预设实验场景。
(2)目标2 的综合识别结果为“高友性倾向目标”。目标2 在返航过程中受到了压制,在越过敌我识别器开/关线时未能产生有效应答,但目标2 符合其他手段的识别规定,因此暂时把目标2 作为“低友性倾向目标”目标,允许其以“需要加强关注”的身份进入最小风险通道,随着目标2 逐渐远离前沿,其受到的压制也在减弱,因此在后续的识别过程中,目标2 的IFF 应答结果是符合要求的。在最小风险通道中飞行时,由于目标2 受损严重,即使尝试按照标准飞行,但还是产生了较大程度的波动,因此该目标的综合识别结果为“高友性倾向目标”,虽然与预设实验场景有一定的差异,但识别结果表明目标2 是具有一定“友性”倾向的,可以避免对目标2 的误击误伤。
(3)目标3 的综合识别结果为“高敌性倾向目标”。该目标试图混入我方空域,因此在敌我识别器开/关线附近时成功进行了IFF 欺骗应答,随着目标3 逐渐远离前沿,我方的抗干扰能力不断提升,目标3 的IFF 应答次数也不断减少,呈现出了“敌性”倾向。由于目标3 并未掌握最小风险通道的飞行参数,虽然整个识别过程中的飞行姿态比较稳定,但不符合飞行标准,因此该目标的综合识别结果为“高敌性倾向目标”,虽然与预设实验场景有一定的出入,但识别结果表明目标3是具有一定“敌性”倾向的,此时可以对目标3 采取一定的措施,避免目标3对我方造成威胁。
根据最终的空中目标综合识别结果,我方指挥官即可立即做出防空决策,如:指挥目标1 进入低高层穿越走廊进行返航;指挥目标2 前往备降场降落,并派遣搜救航空器伴随飞行,确保目标2 的飞行安全。严密监视目标3,指挥其盘旋等待并派遣我方战斗机对目标3 进行拦截验证,若该目标不服从指令或者是验证为敌方目标,即可将其击落。
5 结束语
空情识别作为战场空域控制的一项重要作战任务,对提高空域控制能力,促进联合作战效能提升具有十分重要的作用。论文从战场空域控制的角度出发,结合美军先进经验,介绍了战场空域控制框架下的基于空域协同的空中目标综合识别方法,该方法将空中目标敌我识别和威胁评估相结合,能够更好的贴近作战实际,提升敌我识别能力,可以作为一种新的空中目标敌我识别方法。同时,论文还对空中目标综合识别的工程化应用进行了思考并进行了实例验证,结果表明基于空域协同的空中目标综合识别方法能够较好的完成空情识别任务,可以为相关研究提供一定的借鉴和参考。
猜你喜欢
科技信息·学术版(2021年1期)2021-12-17
科学与生活(2021年21期)2021-11-10
科学与财富(2021年33期)2021-05-10
航空维修与工程(2021年1期)2021-04-12
环球时报(2021-02-01)2021-02-01
科技视界(2020年8期)2020-05-18
农民致富之友(2019年8期)2019-05-22
幼儿智力世界(2016年6期)2016-05-14
祝你幸福·知心(2016年3期)2016-03-29
小雪花·初中高分作文(2015年10期)2015-10-24
